基于干扰补偿的导弹增量式动态逆容错控制方法*
2023-10-18陆宇婷胡庆雷方艺忠
陆宇婷,韩 拓,胡庆雷,方艺忠,刘 鹏
(1. 北京航空航天大学 自动化科学与电气工程学院·北京·100191;2. 北京航天长征飞行器研究所 试验物理与计算数学国家重点实验室·北京 ·100076)
0 引 言
作为保卫国土安全的重要武器,弹道导弹自诞生以来便受到各国关注,发展迅速[1-3]。弹道导弹打击精度高、作战范围广、飞行速度快,但是飞行过程中易受复杂气流干扰且易出现执行机构故障,导致控制器设计所用姿态控制模型与实际动力学特性偏差较大,传统控制方法较难实现姿态鲁棒快速精准跟踪[4-8]。
滑模控制方法作为常用控制方法,具有较强鲁棒性与抗干扰能力,在飞行器姿态控制方面得到广泛研究与应用[9-11]。终端滑模控制运用非线性滑动面进行控制律设计,保证跟踪误差的有限时间收敛特性,但通常需要较大控制增益实现参考指令稳定跟踪,姿态控制系统抖振较大[12-15]。文献[16]针对存在非匹配不确定性的多输入多输出系统控制设计终端滑模控制器,运用虚拟控制量建立系统状态量参考值,运用高阶滑模控制方法使系统误差收敛至零。文献[17]运用自适应项与固定时间干扰观测器设计导弹固定时间滑模控制律,实现非匹配不确定性与未建模动态特性下的导弹姿态控制。文献[18]设计扑翼飞行器自适应加权趋近律终端滑模控制器,实现控制指令快速跟踪,并缓解滑模控制系统抖振问题。文献[19]设计全局快速非奇异终端滑模控制器实现轨迹快速精准跟踪,通过理论推导与实物仿真验证控制误差快速收敛性与鲁棒性。文献[20]针对控制系统输入饱和与固定时间收敛问题,设计考虑输入饱和的飞行器固定时间姿态跟踪滑模控制器。
增量式动态逆控制运用泰勒展开式将系统方程改写为增量形式,进而进行控制系统设计,控制律运用系统上一时刻测量值,对模型依赖性较低,同时可以降低系统残差,控制系统可以利用较小的控制增益实现对参考指令的稳定跟踪,缓解姿态控制器的抖振问题,近年来得到广泛关注与深入研究[21-26]。文献[27]运用增量式动态逆方法设计飞行器控制器,实现模型不确定性与执行机构故障下的飞行器轨迹跟踪。文献[28]针对模型不确定性、外部干扰、执行机构故障下的多输入多输出系统控制问题,提出增量式非奇异终端滑模控制方法,保障系统鲁棒性与有限时间收敛性。文献[29]针对导弹气动参数不确定性、执行机构故障等问题,设计增量式动态逆自适应滑模控制律,兼顾姿态控制算法时效性与可靠性。文献[30]提出基于滑模观测器的增量式滑模控制方法,降低系统模型依赖性,增强系统鲁棒性,本文在此基础上将滑动面改为非线性滑动面,保障系统误差在有限时间内收敛至零。文献[31]运用非线性干扰观测器对系统不确定性进行观测和补偿,设计基于非线性观测器的增量式看、滑模控制器,实现模型不确定性下的飞行器精准鲁棒控制。
本文兼顾增量式动态逆的鲁棒性与终端滑模控制的有限时间收敛性,结合增量式动态逆控制方法和基于滑模观测器的终端滑模控制方法,设计干扰补偿的导弹增量式动态逆容错控制方法,通过导弹典型姿态跟踪仿真,验证执行机构卡死、部分失效、恒定偏差故障下的导弹姿态精准快速控制能力。
1 导弹姿态控制模型建立
定义状态量x1=[α,β,γ]T,状态量x2=[ωz,ωy,ωx]T,控制输入u=[δA,δB,δR]T,则导弹三通道姿态控制模型为[32]
(1)
其中,
B=
f2=
记左右升降舵、方向舵、左右副翼偏转角分别为1~5号舵面,等效控制指令δA,δB,δR,第i(i=1,2,3,4,5)个执行机构指令ui满足
u1=-0.5δA,u2=0.5δA,
u3=δB,u4=-0.5δR,u5=0.5δR
(2)
2 基于干扰补偿的增量式终端滑模控制系统设计
为便于姿态控制系统设计,将系统状态方程式(1)写为
(3)

2.1 基于干扰补偿的终端滑模控制
为增强系统抗干扰能力,引入滑模观测器辅助变量对系统残差进行估计,设计基于干扰补偿的终端滑模控制律。
引入终端滑动面[28-29]

(4)
其中,Λ1=diag([λ1,1,…,λ1,n]T),Λ2=diag·([λ2,1,…,λ2,n]T)为控制增益参数,r=[r1,…,rn]T为指数参数。
引入滑模观测器辅助滑模变量[30]

(5)
选取切换控制律[29]

(6)

则基于干扰补偿的终端滑模控制律(Termi-nal Sliding Mode Control driven by Sliding Mode Observers,TSMC/SMO)
(7)
其中,记s为拉普拉斯变量,等效控制律[30]
(8)
式中,观测器参数τ>0。
2.2 增量式动态逆控制
增量式动态逆控制方法运用泰勒展开将式(3)所示系统状态方程改写为增量形式,再由增量式方程得到增量式动态逆(Incremental Dynamic Inversion,IDI)控制律[29]

(9)
2.3 基于干扰补偿的增量式终端滑模控制
为兼顾姿态控制系统容错能力与快速收敛性,结合基于干扰补偿的终端滑模控制方法和增量式动态逆控制方法,设计基于干扰补偿的增量式动态逆容错控制方法(Incremental Dynamic Inver-sion Terminal Sliding Mode Control driven by Sliding Mode Observers,IDI-TSMC/SMO)。
将跟踪误差二阶微分表达式改写为增量形式
(10)
采用式(4)所示滑动面,将式(10)代入滑动面一阶表达式,可得
(11)
类似式(5),引入滑模观测器辅助变量

(12)
将式(11)代入式(12)可得
(13)
式中,控制系统残差
(14)
根据Lyapunov稳定性理论和增量式滑模稳定性分析可知[30]
|εI,i-ve,i|<Ο(τ)
(15)
式中,Ο(τ)为与τ相关的无穷小量。
则观测器可估计出系统残差,进而对残差进行补偿,可得增量式等效控制律
(16)
采用式(6)所示切换控制律,可得干扰补偿的增量式动态逆容错控制律(IDI-TSMC/SMO)
(17)
将式(17)代入式(11),可得
(18)
由增量式终端滑模控制稳定性分析可知[29-30],系统可在有限时间内到达滑动面,跟踪误差收敛至零。
对于式(3)所示系统状态方程和式(4)所示基于干扰补偿的终端滑模控制器,可知控制系统残差为[27-29]

(19)
3 导弹姿态控制系统仿真验证与分析
针对某典型全弹道姿态跟踪仿真,选取控制器参数如下。
基于干扰补偿的终端滑模控制器(TSMC/SMO):
Λ1=diag([10,2,6]T),
Λ2=diag([1,2,1]T),
r=[1.6,1.6,1.6]T,τ=2×10-3
Kk=[7,10,10]T,
Dk=[0.02,0.02,0.02]T,
Ks=[5,0.5,1.5]T,
Ds=[0.02,0.02,0.02]T
增量式动态逆控制器(IDI):
K1=diag([3.5,3.5,3.5]T),
K2=diag([1,1,1]T),
K3=diag([3.5,3.5,3.5]T),
K4=diag([0.1,0.1,0.1]T)
基于干扰补偿的增量式动态逆容错控制器(IDI-TSMC/SMO):
Λ1=diag([3,1,3]T),
Λ2=diag([1,2,1]T),
r=[1.6,1.6,1.6]T,τ=2×10-3
Kk=[7,10,10]T,
Dk=[0.02,0.02,0.02]T,
Ks=[1.5,0.5,1.5]T,
Ds=[0.02,0.02,0.02]T
执行机构实际输出偏转角vi,i=1,…,5满足|vi|≤25°。
3.1 标称情况仿真结果
无系统不确定性的标称情况下,图1(a)~(f)为三种控制系统姿态角参考指令跟踪情况,图1(g)~(h)为残差估计情况,图1(i)为执行机构偏转情况。如图1(i)所示,标称情况不考虑执行机构故障。如图1(a)~(c)所示,与IDI控制系统相比,TSMC/SMO控制系统和IDI-TSMC/SMO控制系统对攻角、侧滑角和滚转角跟踪调节时间均较短,但TSMC/SMO控制系统对侧滑角和滚转角进行跟踪时存在超调。如图1(d)~(f)所示,三种控制方法在不考虑系统不确定性的情况下均能实现导弹姿态精准跟踪控制。如图1(g)~(h)所示,两种方法观测器均能以较小误差对残差进行估计,IDI-TSMC/SMO控制系统残差相对较小。

(a)标称情况攻角跟踪情况
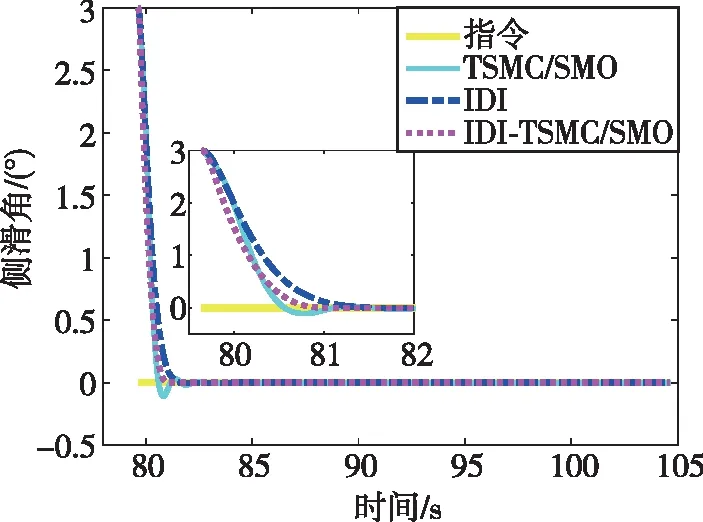
(b)标称情况侧滑角跟踪情况
(c)标称情况滚转角跟踪情况
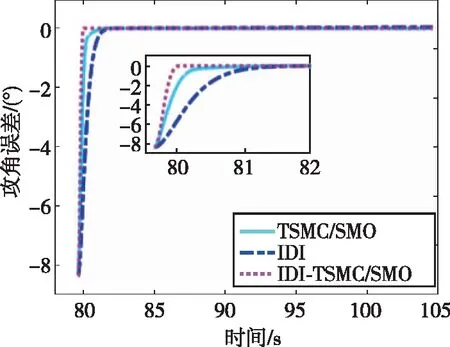
(d)标称情况攻角跟踪误差
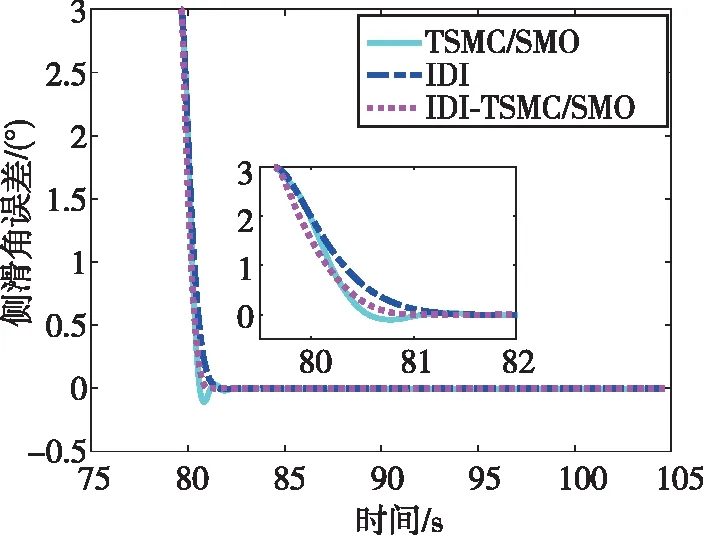
(e)标称情况侧滑角跟踪误差
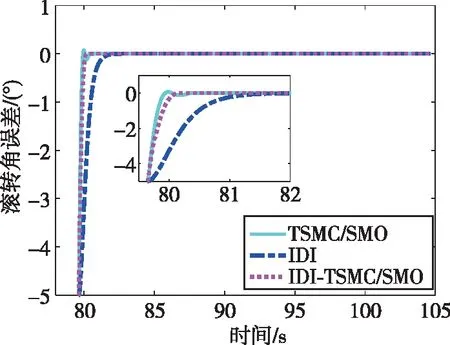
(f)标称情况滚转角跟踪误差
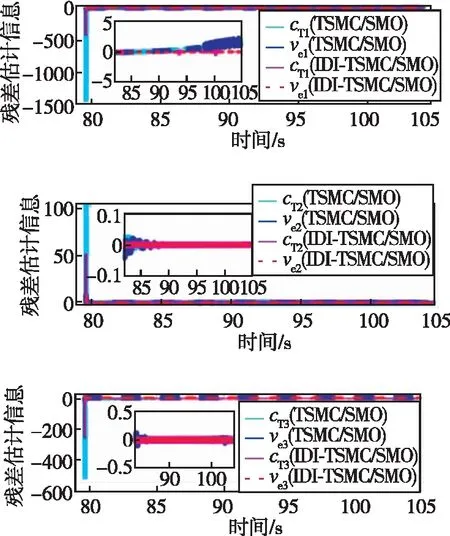
(g)标称情况残差估计情况
(h)标称情况残差估计误差
(i)标称情况舵面偏转角图1 标称情况仿真情况Fig.1 Simulation results without faults
3.2 组合故障仿真结果
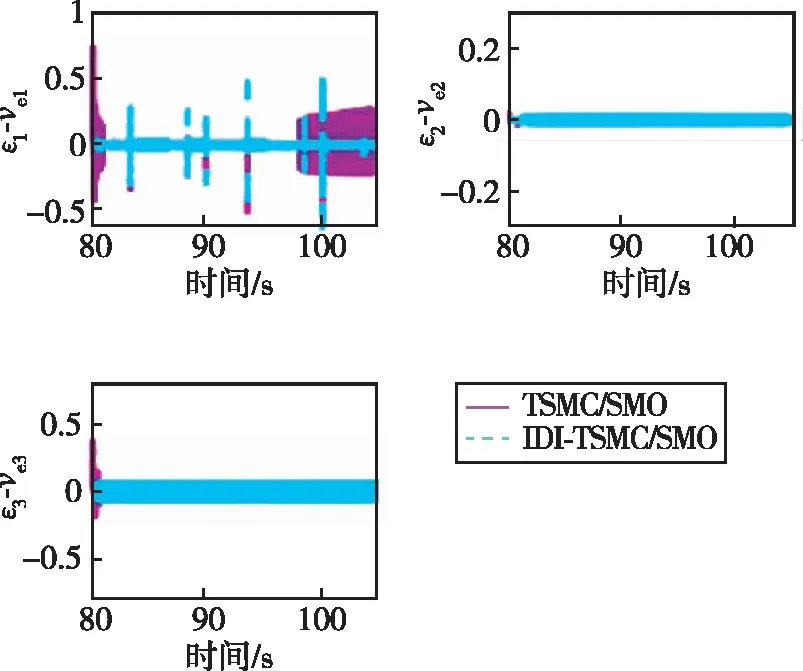
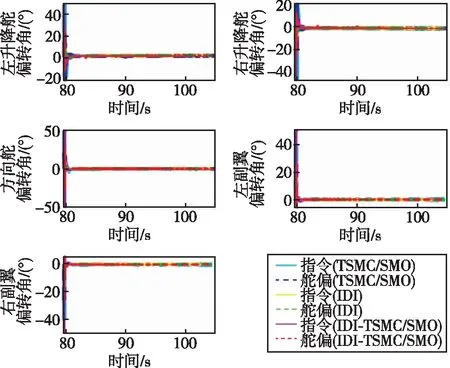
设置左升降舵恒定偏差故障、右升降舵失效故障、右副翼卡死故障,典型全弹道姿态控制仿真结果如图2所示。其中,图2(a)~(f)为TSMC/SMO,IDI,IDI-TSMC/SMO控制系统姿态角参考指令跟踪情况,图2(g)~(h)为残差估计情况,图2(i)为执行机构偏转情况。

(a)组合故障下攻角跟踪情况
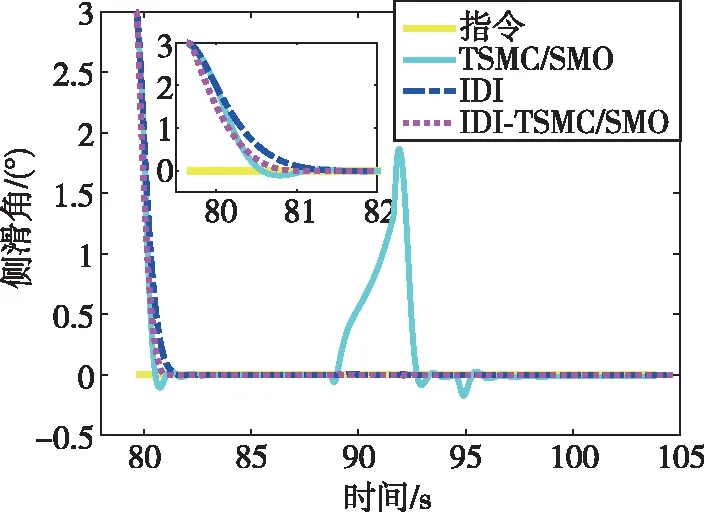
(b)组合故障下侧滑角跟踪情况
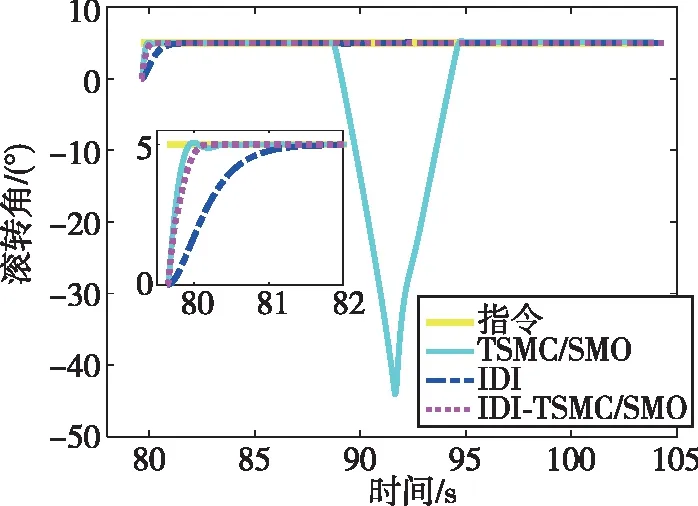
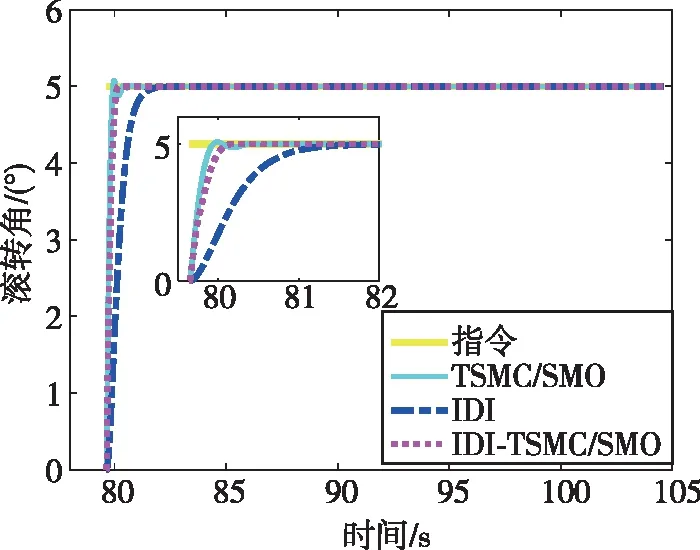
(c)组合故障下滚转角跟踪情况
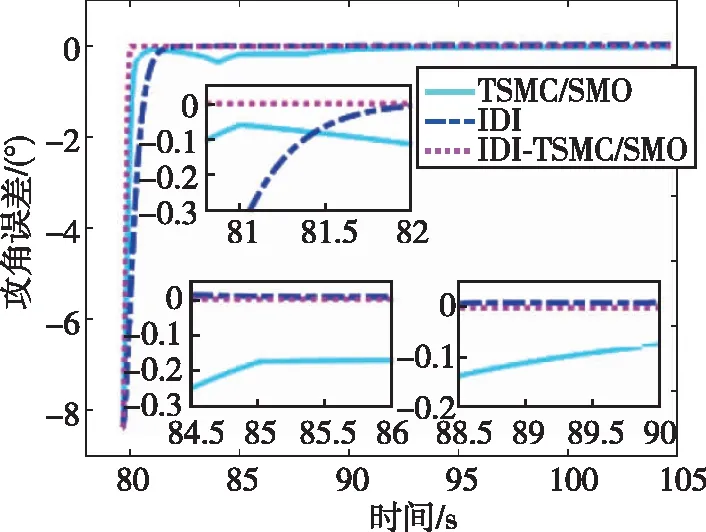
(d)组合故障下攻角跟踪误差
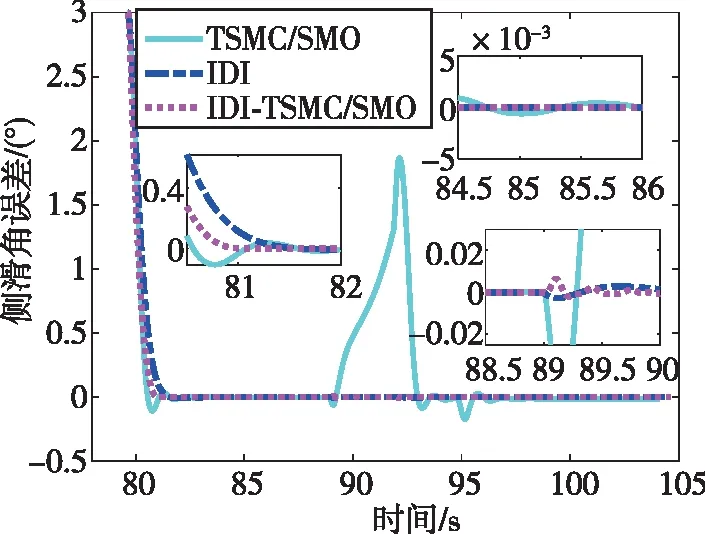
(e)组合故障下侧滑角跟踪误差
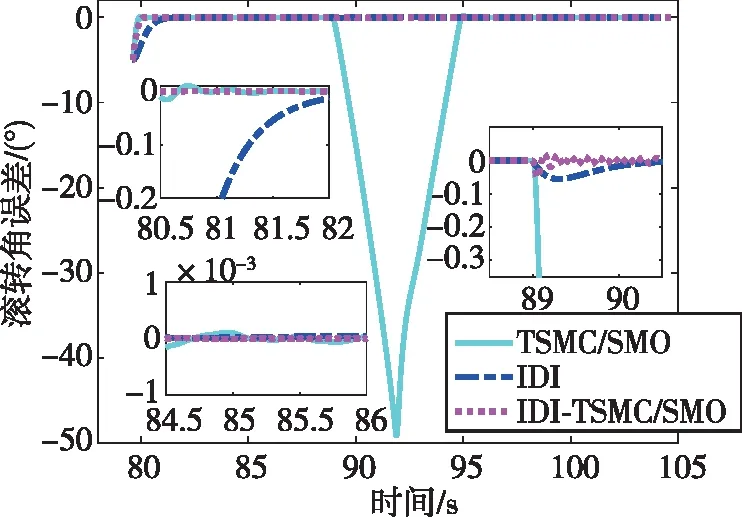
(f)组合故障下滚转角跟踪误差
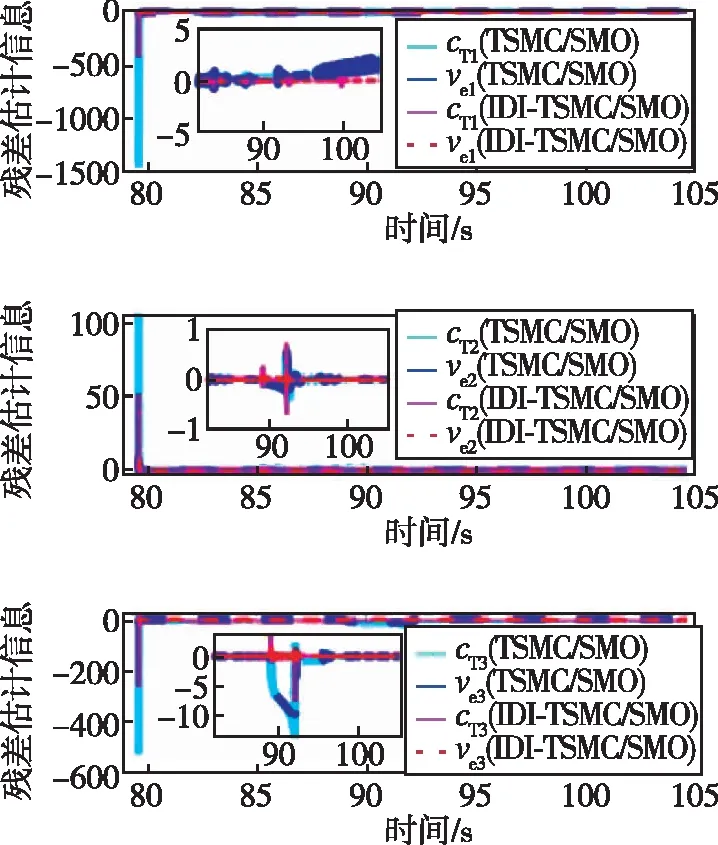
(g)组合故障下残差估计情况
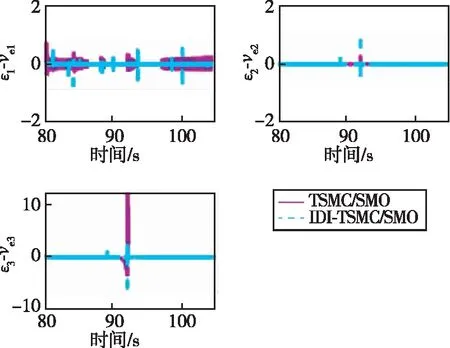
(h)组合故障下残差估计误差
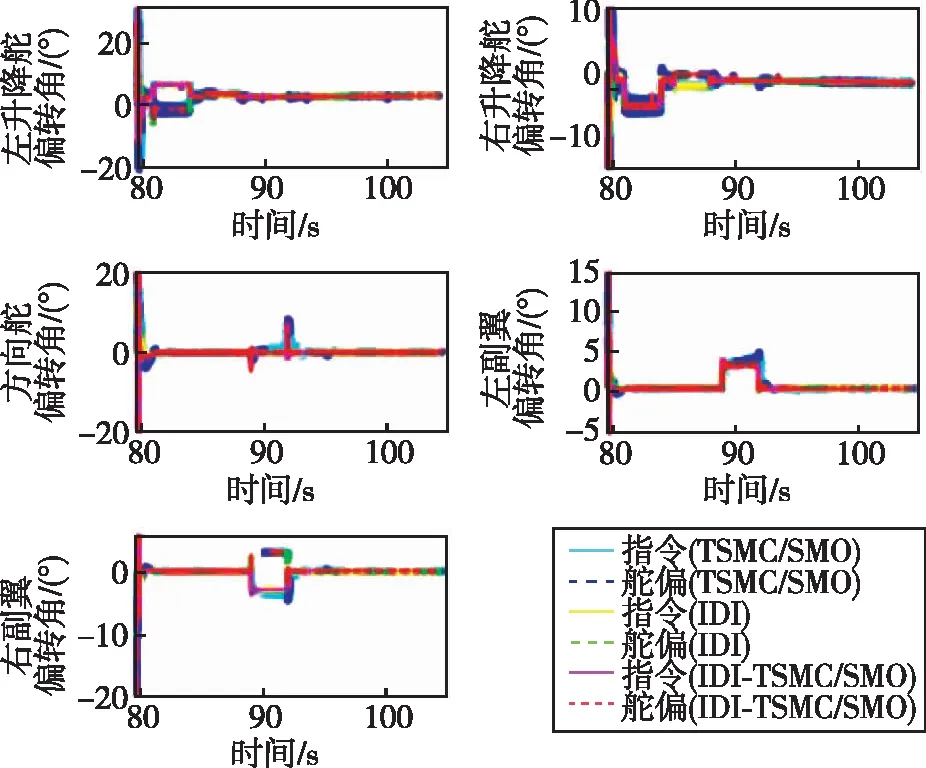
(i)组合故障下舵面偏转角图2 组合故障下仿真情况Fig.2 Simulation results with deviation,loss of efficiency and stuck faults
如图2(i)所示,左升降舵81s 本文研究了基于干扰补偿的导弹增量式姿态容错控制方法。针对导弹三通道姿态控制系统,在考虑执行机构故障等不确定性的情况下,给出基于干扰观测器的终端滑模控制方法与增量式动态逆控制方法,结合两种控制方法设计基于干扰补偿的增量式姿态鲁棒控制方法。理论分析可知,与基于干扰观测器的终端滑模控制方法相比,基于干扰补偿的增量式姿态鲁棒控制方法具有较小的控制系统残差,所需控制增益较小,姿态控制系统容错能力较强。全弹道姿态跟踪仿真表明,与TSMC/SMO相比,IDI和IDI-TSMC/SMO具有较好的鲁棒性,而与IDI相比,IDI-TSMC/SMO具有较好的指令信号跟踪动态特性。4 结 论