基于透视网格的自适应窄带表面粒子提取方法
2023-10-17周志强吴桐张严辞
周志强 吴桐 张严辞


摘 要:为了提升基于粒子的流体表面重建效率,提出了一种基于透视网格的自适应窄带表面粒子提取方法。与基于物体空间的方法相比,该方案根据粒子密度、离散系数等信息自适应提取视锥范围内最靠近视点的表面粒子,使表面粒子数、内存消耗仅与可见的表面区域相关,而不是整个流体表面或模拟域。此外,利用透视网格沿视线排布的优势,提出了基于粒子密度的自适应厚度估计方法。实验结果表明,该方案有效减少了40%~76%的表面粒子和30%~50%的内存开销,解决了表面粒子冗余和空洞问题,并以较低的代价获取了厚度信息。该方案为后续的表面重建和渲染带来了明显的性能提升,可以更好地处理大规模粒子集的重建和渲染。
关键词:表面重建;表面粒子提取;透视网格;厚度;自适应;窄带
中图分类号:TP391 文献标志码:A 文章编号:1001-3695(2023)10-042-3155-07
doi:10.19734/j.issn.1001-3695.2023.01.0022
Perspective-grid-based adaptive narrow-band surface particle extraction method
Zhou Zhiqianga,Wu Tonga,Zhang Yancia,b
(a.National Key Laboratory of Fundamental Science on Synthetic Vision,b.College of Computer Science,Sichuan University,Chengdu 610065,China)
Abstract:In order to improve the efficiency of particle-based fluid surface reconstruction,this paper proposed a perspective-grid-based adaptive narrow-band surface particle extraction method.Compared with the object-space-based method,this scheme adaptively extracted the surface particles closest to the viewpoint within the frustum according to the particle density,dispersion coefficient,so that the number of surface particles and memory consumption were related to the visible surface area,rather than the entire fluid surface or simulation domain.In addition,this paper presented an adaptive thickness estimation method based on particle density by taking advantage of the arrangement of perspective grids along the view.Experiments show that this scheme effectively reduces surface particles by 40% to 76% and memory overhead by 30% to 50%,solves the problems of surface particle redundancy and holes,and quickly obtains thickness information at a lower cost.This scheme brings significant performance improvement for surface reconstruction and rendering,and can better handle the surface reconstruction and rende-ring of large-scale particle sets.
Key words:surface reconstruction;surface particle extraction;perspective grid;thickness;adaptive;narrow band
0 引言
在流体模拟领域中,光滑粒子动力学方法(smoothed particle hydrodynamics,SPH)[1~3]因具有较高的空间灵活性,在模拟流体流动、动态交互等方面得到了广泛研究。然而,从非结构化的粒子集中重建出高质量流体表面仍然是一项具有挑战性的任务。
表面重建技术[4~13]已经得到了广泛研究。其中,屏幕空间方法只需重建离视点最近的一层表面, 因其效率在实时流体重建领域备受关注。然而,无论是基于滤波[4~7]还是基于光线步进[10~13]的屏幕空间方法,都需要绘制大量的流体粒子,时间开销比较大。当流体粒子规模较大时,该类方法会遇到明显的性能瓶颈。
实际上,只有位于流体表面的粒子对表面重建有帮助。许多研究人员提出了不同的方法来提取表面粒子,使表面重建的计算复杂度和内存消耗仅与流体表面积成比例,而不是整个流体模拟域[14]。其研究方向主要分为边缘检测方案和窄带方案两类。在边缘检测方案[15~17]中,通常采用逐粒子邻域搜索来提取表面粒子。在窄带方案[7,14,18~21]中,常在物體空间中均匀划分网格,以网格为粒度,将靠近流体表面的窄带区域的粒子提取为表面粒子。
以上方法主要提取物体空间中位于整个流体表面的粒子,本文则提出了一种基于透视网格的提取方法,仅提取可见区域最靠近视点的表面粒子,以减少其数量和提升表面重建的效率。实际上,大量的粒子之间容易相互遮挡,只有少数最靠近视点的粒子对表面重建有贡献[4~7,10~13]。若大部分不可见的粒子被输入到表面重建中,会浪费计算资源[14]。另外,原有窄带方法仅仅依赖单元格与流体表面区域的距离来定义表面粒子,忽略了粒子的分布情况[18~21]。对于飞溅区域,由于粒子分布相对稀疏,相邻粒子之间可能存在较大的间隙,导致重建的表面出现空洞。为此,本文提出了一种基于透视网格的自适应窄带表面粒子提取方法,解决了上述表面粒子冗余和空洞问题。该方法根据粒子数量、粒子渲染半径以及反映粒子分布情况的离散系数自适应提取可见区域最靠近视点的表面粒子。在粒子分布相对稀疏的区域提取到更多的表面粒子以避免空洞问题的发生,同时有效减少了不可见区域的表面粒子数。
此外,受制有限的网格分辨率,当以近乎平行流体边界的角度观察时,前后位置相距较远的粒子很容易被划分到沿该视线方向的单元格序列中。这会使表面粒子的提取因过早满足条件而终止,导致许多靠后但可见的粒子被错误识别为内部粒子,引起流体边缘出现空洞。为此,本文提出了基于邻域的单元格分类算法,识别与视线方向相同的边界单元格,并为其赋予更小的权重,以提取足够多的表面粒子覆盖边界表面。
最后,现有屏幕空间方法通常光栅化所有粒子[4,6]或将相邻的粒子合并成更大的虚拟粒子[7,10]以运用Alpha混合操作获取厚度,其优势在于实现简单。但Alpha混合操作需要频繁的内存读写,受粒子数目和大小影响,时间开销较大。为了提升厚度估计的时间效率,本文利用透视网格沿视线分布的特点,设计了一种基于粒子密度的自适应厚度估计方法,将其效率与粒子数目及大小解耦。该方法以透视网格为粒度,通过加权累计单元格的有效长度来快速获取厚度信息。
综上所述,本文貢献点主要包括:
a)提出一种基于透视网格的自适应窄带表面粒子提取方法,提升了后续表面重建的效率和质量。
b)基于上述方法,提出一种基于邻域的单元格分类方法,以解决因透视网格分辨率不足而导致边界产生空洞的问题。
c)利用透视网格沿视线排布的优势,提出一种基于粒子密度的自适应厚度估计方法,提升了厚度估计的时间效率。
1 相关工作
准确的表面粒子识别对提升表面重建效率和质量起着关键作用。现有的表面粒子提取技术主要分为两类:
a)边界检测法,通过逐粒子采样相邻粒子来识别单层的表面粒子。常见的方法有两类:(a)密度场法,常通过加权相邻粒子的密度信息来识别表面粒子,Hopp-Hirschler等人[16]通过逐粒子采样相邻粒子的密度和位置等信息的平滑色场法(smoothed color field,SCF)来识别表面粒子,然而该方法很难设置合适的全局阈值;(b)几何方法,常利用粒子的几何信息来识别表面粒子,Liu等人[17]通过判断一个粒子是否完全被相邻粒子所包围来识别表面粒子。边界检测方法严重依赖于粒子的分布情况,对于剧烈波动的流体区域,容易发生错误的识别。
b)窄带法,高质量的表面重建需要部分内部粒子的存在,以形成足够健壮的表面区域。基于窄带的提取方法[18~21]通常以网格为粒度,而不是逐粒子进行可见性测试,从而提升了整体性能。Akinci等人[18]将窄带的思想引入表面提取中,只在流体表面附近的标量场网格中执行行进立方体算法[22]。Wu等人[19]改进了Akinci等人的方法,但仍然没有完全并行化。Chen等人[21]只在外表面区域构建标量场,并提出了一种检测标量场外表面顶点的方法来消除冗余的顶点,从而显著降低了计算复杂度和内存消耗。Yang等人[14]设计了一种完全并行的窄带方案,基于空间哈希网格的策略识别表面粒子,比SCF方法更精确和简单。Oliveira等人[7]利用分层邻域法(layered neighborhood method,LNM)对流体不同区域进行分层,并将靠近流体表面区域的多层网格中的粒子识别为表面粒子。
2 基于透视网格的自适应窄带表面粒子提取方案
对基于屏幕空间的流体表面重建来说,只有处于视锥内且最靠近视点的粒子有贡献。在LNM方法[7]中,位于视锥之外、流体背部、相互遮挡的多层水等不可见区域的表面粒子冗余,如图1(a)红框区域所示。这些冗余的表面粒子占整个表面粒子集的大部分,限制了后续表面重建的性能。另外,如图1(a)中红色粒子所在的区域,由于粒子分布不均匀,尤其是在飞溅区域,仅仅依赖单元格与流体表面区域的距离来提取表面粒子,可能无法覆盖表面,导致重建的表面出现空洞,影响表面质量。
为了解决上述表面粒子冗余和空洞问题,本文提出了一种基于透视网格的自适应窄带表面粒子提取方法,根据粒子数量、粒子渲染半径以及反映粒子分布情况的离散系数自适应提取可见区域最靠近视点的表面粒子,如图1(b)所示。累计量的好坏直接影响着提取的表面粒子数以及效率。如果定义的累计量合理,提取的表面粒子在足以覆盖流体表面的前提下,不产生冗余;否则,可能因提取的表面粒子不足以覆盖表面而产生空洞,或提取到大量冗余的表面粒子降低重建的效率。
2.1 透视映射
受纹理切片思想[23,24]的启发,本文引入了基于Tile的稀疏透视网格结构,视锥体被划分为Dx×Dy×Dz个单元格,如图2所示。其中,沿同一视线方向的单元格序列称为同一Tile束,覆盖Tx×Ty个像素。与通常在整个模拟域建立均匀网格相比,本文根据粒子集的AABB包围盒范围自适应构建透视网格,使其仅分布在视锥内有粒子分布的区域,如图2中的A2区域所示,减少了单元格的数量和内存开销。
2.3 自适应窄带表面粒子提取
为了在飞溅区域提取到足够多的粒子覆盖表面,分层邻域法[7]需要设置一个较大的全局阈值φmax,但这会导致大部分只需较小φmax的平缓区域,将大量内部粒子识别为窄带表面粒子,降低了后续表面重建的效率,不能很好地支持流体飞溅的场景。
为此,本文提出了一种基于透视网格的自适应窄带表面粒子提取算法,根据流体局部信息动态调整不同区域的φmax,以减少平缓区域的窄带表面粒子。由于透视网格在Z轴自适应划分单元格的深度范围,其大小以及粒子数都会随着视距的变化而变化,但两者之间的比值却比较稳定。另外,粒子分布相对稀疏的区域相邻粒子之间往往存在较大的间隙,少量的粒子不能有效覆盖流体表面。为此,本文利用单元格的粒子密度ρ(cijk)和其粒子离散系数cv(cijk)定义遮挡分数o(cijk),作为沿视线方向遍历的累计量,如式(4)所示。
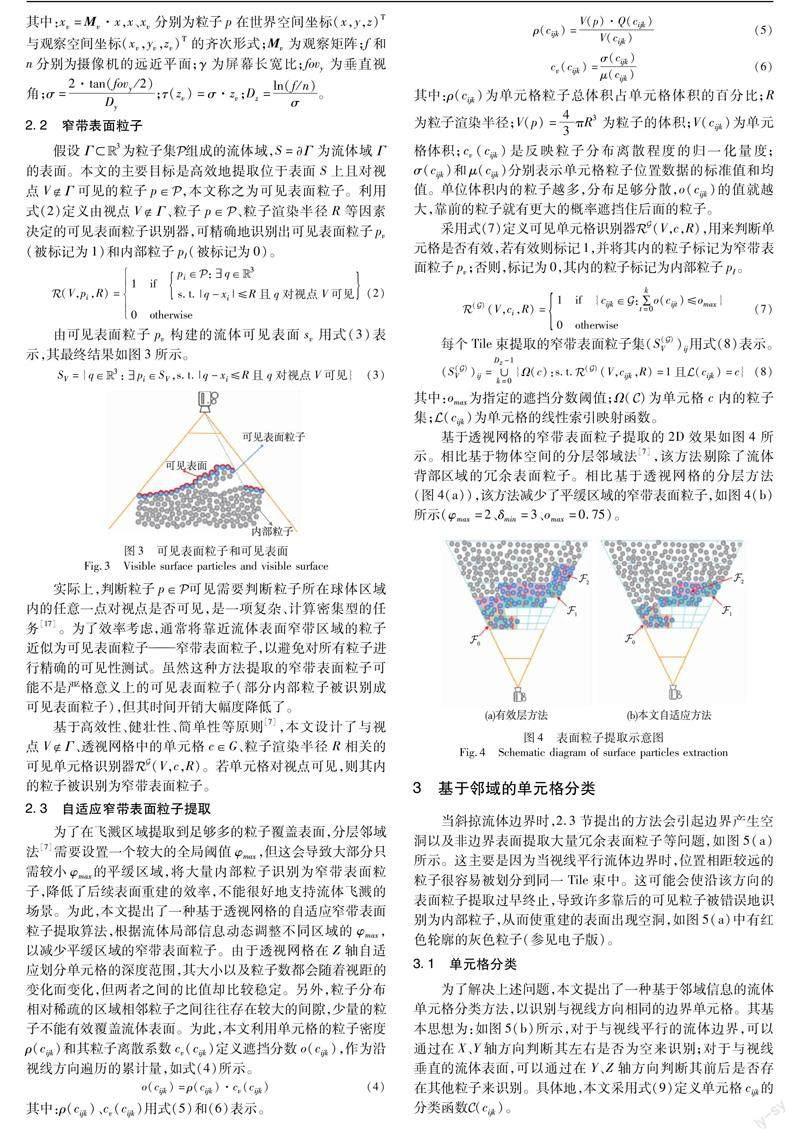
基于透视网格的窄带表面粒子提取的2D效果如图4所示。相比基于物体空间的分层邻域法[7],该方法剔除了流体背部区域的冗余表面粒子。相比基于透视网格的分层方法(图4(a)),该方法减少了平缓区域的窄带表面粒子,如图4(b)所示(φmax=2、δmin=3、omax=0.75)。
3 基于邻域的单元格分类
当斜掠流体边界时,2.3节提出的方法会引起边界产生空洞以及非边界表面提取大量冗余表面粒子等问题,如图5(a)所示。这主要是因为当视线平行流体边界时,位置相距较远的粒子很容易被划分到同一Tile束中。这可能会使沿该方向的表面粒子提取过早终止,导致许多靠后的可见粒子被错误地识别为内部粒子,从而使重建的表面出现空洞,如图5(a)中有红色轮廓的灰色粒子(参见电子版)。
3.1 单元格分类
为了解决上述问题,本文提出了一种基于邻域信息的流体单元格分类方法,以识别与视线方向相同的边界单元格。其基本思想为:如图5(b)所示,对于与视线平行的流体边界,可以通过在X、Y轴方向判断其左右是否为空来识别;对于与视線垂直的流体表面,可以通过在Y、Z轴方向判断其前后是否存在其他粒子来识别。具体地,本文采用式(9)定义单元格cijk的分类函数Euclid Math OneCAp(cijk)。
由于相邻的单元格存在相同的邻域单元格,若每个单元格都加载一遍邻域单元格,可能导致大量的重复加载,严重影响单元格分类的效率。为此,本文设计了一种利用共享内存机制加速单元格分类的策略。该策略的基本思想是:利用GPU共享内存机制只对相同的邻域单元格加载一次,暂存起来以供其他单元格的访问,具体的流程如算法2所示。其中,重要部分加黑表示。
4 基于粒子密度的自适应厚度估计
现有估计厚度的方法通常光栅化所有粒子[4,6]或用虚拟粒子[7,10]替代流体内部单元格中的所有粒子以运用Alpha混合操作获取厚度,但Alpha混合操作需要频繁地读写内存,时间开销较大。
为此,本文依赖2.1节的透视网格结构,设计了一种基于粒子密度的自适应厚度估计方法,将其效率与粒子数目、大小解耦,通过加权累计单元格的有效长度来快速获取厚度信息。其基本思想为:利用透视网格沿视线排布的特点,沿视线方向从前到后遍历单元格并通过粒子密度累计其有效的长度来估计每个Tile束的厚度,如图6右侧局部放大图所示。单元格内的粒子数越多,则该单元格的有效长度越接近其实际长度。每个Tile束的厚度Euclid Math OneTApij可以用式(11)表示。
具体的算法流程如算法4所示,重要部分加黑表示。
5 实验
为了保证实验的公平性,本文所有的实验均在NVIDIA GeForce RTX 3070 GPU的PC端进行,屏幕分辨率为1920×1920。SPH粒子集由position based fluids(PBF)[27]方法产生,时间步长为0.02 s,在不同场景中使用的均匀网格尺寸均为0.1。
由2.2节可知粒子的渲染半径影响着其可见性以及时间开销。适合的渲染半径会在表面质量与时间效率之间建立平衡,使两者均能满足要求。在本文所有的实验场景中,当渲染半径R∈[0.05,0.1]时,重建表面的质量和时间开销均能很好地满足要求。因此,为了简化粒子渲染半径对实验的影响,本文设置R=0.06。
5.1 表面重建效率
为了验证本文方法可以有效提升表面重建的效率,对比SCF[16]、LNM[7]、经背部剔除等优化的LNM+,分别在灯塔、双溃坝、水立方、海浪等模拟场景中进行表面粒子提取和表面重建。本文统计了四种方法在不同场景提取的表面粒子数、平均时间开销、平均内存开销、Mc值,用来评估方法的效率(分析如表1所示)。其中,以完整粒子集重建的表面作为参考。
1)表面粒子数
由图7表面粒子数可视化结果可知,本文方法在不同场景中提取的表面粒子数均少于其他方法,其下降幅度与场景深度复杂度(由深度值的均方差σ量化)相关。如果场景中许多粒子被遮挡,下降幅度就会明显,如海浪场景(σ=27.3),分别减少了24.51%、51.10%、39.91%。在大多数粒子被遮挡的极端视角下,表面粒子减少得就会更明显,如双溃坝场景(σ=41.8),分别减少了70.64%、75.88%、55.27%。而在深度复杂度较低的水立方场景(σ=5.2),则分别减少了44.50%、51.72%、8.29%。
值得注意的是,在飞溅场景中,LNM、LNM+等方法为了提取足够多的粒子覆盖飞溅区域的表面,需要设置一个较大的全局阈值φmax,但这会导致平缓区域将大量内部粒子识别为表面粒子。如在海浪场景中,LNM、LNM+分别比SCF方法多提取了54.39%、25.63%,而本文方法则比SCF方法少提取了24.51%。这是因为本文方法在有效考虑粒子密度的同时,结合了单元格内的粒子分布信息,得以自适应调整不同区域的φmax,有效减少了平缓区域的表面粒子。
2)时间开销、内存开销
由表1的平均时间开销列数据可知,光栅化获取深度图和表面粒子的提取在总耗时的占比最高,以本文方法为例,平均为58.72%、26.43%。由表1的深度图列数据可知,渲染深度图的时间开销与表面粒子数成正比。由于本文方法仅提取最靠近视点的一层粒子,表面粒子数最少,所以时间开销最少,比其他方法节省了至少45%的时间成本。而SCF方法由于在提取过程中需要逐粒子邻域搜索,算法效率最慢。LNM+方法需要计算单元格内粒子的向外法向量进行背部剔除优化,额外增加了时间开销。
由表1的平均内存开销列数据可知,相比基于物体空间的表面粒子提取方法,本文方法的内存开销节省了30%~50%。这是因为本文根据粒子集的AABB包围盒自适应构建透视网格,使其仅分布在视锥内有粒子分布的区域,而不是整个模拟域。
3)Mc值
Mc为由准确率和假阳率混合的综合指标,用于评估不同提取方法的效率差异,如式(13)所示。
其中:准确率(TPR)反映了提取表面粒子的精度;假阳率(FPR)反映了内部粒子被错误识别为表面粒子的程度。
在Mc值上,本文方法在不同场景中均高于另外四种方法,接近于0.9。这是因为本文方法仅提取最靠近视点的一层表面粒子,剔除了视锥之外、流体背部、相互遮挡的多层水等不可见区域的冗余表面粒子,更接近理想的可见表面粒子集SV(通过将粒子ID输出到屏幕上,逐像素遍历可得最靠前的一层可见表面粒子)。
5.2 重建质量
为了验证表面重建质量,本实验在海浪场景分别采用本文方法、SCF、LNM、LNM+等方法进行表面粒子的提取和重建。如图8所示,在飞溅区域,除了本文方法,其余方法重建的表面均出现了空洞或凹陷。这些问题源于SCF、LNM、LNM+等方法不考虑粒子渲染半径的影响,忽略了位于粒子分布相对稀疏区域的相邻粒子之间往往存在较大的间隙,仅依赖核半径[15~17]或单元格与流体表面区域的距离来定义表面粒子[7,21]的可见性。而本文方法同时考虑了粒子数量、粒子分布、粒子渲染半径等信息,在粒子分布相对稀疏的区域提取更多的粒子以避免空洞的产生。可以明显看出,本方法修复了其余方法存在的空洞或凹陷等问题,有效提升了重建的表面质量。
5.3 单元格分类有效性
为了验证本文单元格分类方法的有效性,本文对有无单元格分类的提取和重建效果进行了比较。从图9可以明显看出,当紧贴着海浪场景的流体边缘观察时,结合单元格分类的本文方法消除了边界的空洞(黄线框区域)。这主要是因为本文方法对单元格分类后,对位于流体边界的单元格赋予更小的权重,以提取到完整的边界粒子;而赋予其余单元格更大的权重,以在其余非边界的表面提取到更少的表面粒子,如图9(c)中的红线框区域。与无单元格分类相比,本场景视角下在结合单元格分类后表面粒子数减少了32.45%。
5.4 厚度估计效率
为了验证基于粒子密度的自适应厚度估计算法的高效性,本实验对比了本文加权累计方法、Truong等人[4]、Oliveira等人[7]的厚度估计方法在双溃坝场景第40帧、第120帧、第200帧、第280帧的时间开销和渲染结果。从图10在双溃坝场景下厚度估计的时间开销可以明显看出,在渲染质量上,与文献[4,7]的方法相比,本文方法几乎没有明显差别。在时间消耗上,本文方法耗时几乎可以忽略不计(0.03~0.04 ms)。如第4章分析,本文方法将厚度估计的效率与粒子数目、大小解耦,利用透视网格沿视线排布的优势,以单元格为粒度,直接通过粒子密度来加权累计单元格的有效长度估计流体厚度。由于该过程与本文表面粒子的提取均需要从前往后遍历单元格,本文将两者放在同一pass进行,进一步提高了时间效率。
另外,由于透视网格分辨率远小于全分辨率,如果直接采样低分辨率的厚度图,会引入严重的块状伪影。为了消除伪影,本文使用平滑半径较小的双边过滤器(5×5)[28]对厚度图进行平滑,这会增加较小的性能开销,但可以消除大部分伪影。
6 结束语
本文提出了基于透视网格的自适应窄带表面粒子提取和厚度估計方案,根据单元格的粒子密度和离散系数自适应提取最靠近视点的粒子,有效提高了表面重建的效率,且利用透视网格沿视线排布的优势,加权累计单元格的有效长度,快速估计流体的厚度。与以前的方法相比,本文方案显著降低了计算复杂度和内存消耗,为后续的表面重建带来了很大的性能提升,可以很好地处理大规模粒子的渲染。
本文方案也存在一些不足。如第4章所述,因忽略粒子对周围单元格的影响,导致视点靠近流体时表面粒子增多,算法效率下降。未来将参照文献[24]中的方法将粒子的贡献扩散到周围,进一步提升表面重建的效率。
参考文献:
[1]李泓澍.基于自适应光滑长度的 SPH 流体模拟方法[D].广州:广东工业大学,2020.(Li Hongshu.SPH fluid simulation method based on adaptive smooth length[D].Guangzhou:Guangdong University of Technology,2020.)
[2]刘树森,何小伟,王文成,等.光滑粒子流体动力学(SPH) 流体仿真技术综述[J/OL].软件学报.(2023-04-21).https://doi.org/10.13328/j.cnki.jos.006777.(Liu Shusen,He Xiaowei,Wang Wencheng,et al.Review of fluid simulation techniques for smooth particle fluid dynamics(SPH)[J/OL].Journal of Software.(2023-04-21).https://doi.org/10.13328/j.cnki.jos.006777.)
[3]Khayyer A,Shimizu Y,Gotoh T,et al.Enhanced resolution of the continuity equation in explicit weakly compressible SPH simulations of incompressible free-surface fluid flows[J].Applied Mathematical Modelling,2023,116:84-121.
[4]Truong N,Yuksel C.A narrow-range filter for screen-space fluid rendering[C]//Proc of ACM on Computer Graphics and Interactive Techniques.New York:ACM Press,2018:1-15.
[5]楊欣.基于曲率流的屏幕空间流体渲染[J].现代计算机:专业版,2018(8):94-98,105.(Yang Xin.Screen space fluid bleaching based on curvature flow[J].Modern Computer:Professional Edition,2018(8):94-98,105.)
[6]Xu Yanrui,Xu Yuanmu,Xiong Yuege,et al.Anisotropic screen space rendering for particle-based fluid simulation[J].Computers & Graphics,2023,110:118-124.
[7]Oliveira F,Paiva A.Narrow-band screen-space fluid rendering[J].Computer Graphics Forum,2022,41(6):82-93.
[8]李静雪,甄成刚.粒子流体表面重建技术研究[J].信息系统工程,2019(8):140,142.(Li Jingxue,Zhen Chenggang.Research on particle fluid surface reconstruction technology[J].Information Systems Engineering,2019(8):140,142.)
[9]Ummenhofer B,Koltun V.Adaptive surface reconstruction with multiscale convolutional kernels[C]//Proc of IEEE/CVF International Conference on Computer Vision.Piscataway,NJ:IEEE Press,2021:5631-5640.
[10]Xiao Xiangyun,Zhang Shuai,Yang Xubo.Real-time high-quality surface rendering for large scale particle-based fluids[C]//Proc of the 21st ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games.New York:ACM Press,2017:1-8.
[11]Brito C J D S,De Silva A L B V,Teixeira J M,et al.Ray tracer based rendering solution for large scale fluid rendering[J].Computers & Graphics,2018,77:65-79.
[12]Li Hui,Chang Bohong,Wang Lian,et al.Surface reconstruction for tin-based perovskite solar cells[J].ACS Energy Letters,2022,7(11):3889-3899.
[13]Wu Tong,Zhou Zhiqiang,Wang Anlan,et al.A real-time adaptive ray marching method for particle-based fluid surface reconstruction[C]//Proc of Eurographics Symposium on Rendering.Goslar,Germany:Eurographics Association,2022.
[14]Yang Wencong,Gao Chengying.A completely parallel surface reconstruction method for particle-based fluids[J].The Visual Compu-ter,2020,36(10):2313-2325.
[15]Sandim M,Oe N,Cedrim D,et al.Boundary particle resampling for surface reconstruction in liquid animation[J].Computers & Gra-phics,2019,84:55-65.
[16]Hopp-Hirschler M,Shadloo M S,Nieken U.A smoothed particle hydrodynamics approach for thermo-capillary flows[J].Computers & Fluids,2018,176:1-19.
[17]Liu Wenbin,Ma Dongjun,Qian Jianzhen,et al.High-accuracy three-dimensional surface detection in smoothed particle hydrodynamics for free-surface flows[EB/OL].(2022-05-04).https://arxiv.org/abs/2205.02742.
[18]Akinci G,Ihmsen M,Akinci N,et al.Parallel surface reconstruction for particle-based fluids[J].Computer Graphics Forum,2012,31(6):1797-1809.
[19]Wu Wei,Li Hongping,Su Tianyun,et al.GPU-accelerated SPH fluids surface reconstruction using two-level spatial uniform grids[J].The Visual Computer,2017,33(11):1429-1442.
[20]邹长军,尹勇.基于Narrow Band FLIP方法的流体模拟[J].计算机辅助设计与图形学学报,2018,30(4):577-583.(Zou Changjun,Yin Yong.Fluid simulation based on Narrow Band FLIP method[J].Journal of Computer-Aided Design & Computer Graphics,2018,30(4):577-583.)
[21]Chen Qiaorui,Zhang Shuai,Zheng Yao.Enhanced narrow band surface reconstruction with anisotropic kernel[J].Computers & Gra-phics,2022,102:280-288.
[22]Takahashi T,Batty C.Fast marching-cubes-style volume evaluation for level set surfaces[J].Journal of Computer Graphics Techniques,2022,11(2):30-45.
[23]Hochstetter H,Orthmann J,Kolb A.Adaptive sampling for on-the-fly ray casting of particle-based fluids[C]//Proc of High Performance Graphics.Goslar,Germany:Eurographics Association,2016:129-138.
[24]Fraedrich R,Auer S,Westermann R.Efficient high-quality volume rendering of SPH data[J].IEEE Trans on Visualization and Computer Graphics,2010,16(6):1533-1540.
[25]Zirr T,Dachsbacher C.Memory-efficient on-the-fly voxelization and rendering of particle data[J].IEEE Trans on Visualization and Computer Graphics,2017,24(2):1155-1166.
[26]Piochowiak M,Rapp T,Dachsbacher C.Stochastic volume rendering of multi-phase SPH data[J].Computer Graphics Forum,2021,40(1):97-109.
[27]Macklin M,Myuller M.Position based fluids[J].ACM Trans on Graphics,2013,32(4):1-12.
[28]王得成,陳向宁,易辉,等.基于自适应联合双边滤波的深度图像空洞填充与优化算法[J].中国激光,2019,46(10):294-301.(Wang Decheng,Chen Xiangning,Yi Hui,et al.Depth image hole filling and optimization algorithm based on adaptive joint bilateral filtering[J].China Laser,2019,46(10):294-301.)
[29]Li Fubing,Su Yongqi.Stackless KD-tree traversal for ray tracing[C]//Proc of the 2nd International Conference on Electronics,Communications and Information Technology.Piscataway,NJ:IEEE Press,2021:1168-1172.
[30]张文胜,解骞,钟瑾,等.基于八叉树邻域分析的光线跟踪加速算法[J].图学学报,2015,36(3):339-344.(Zhang Wensheng,Xie Qian,Zhong Jin,et al.Ray tracing acceleration algorithm based on octree neighborhood analysis[J].Journal of Graphics,2015,36(3):339-344.)
收稿日期:2023-01-23;修回日期:2023-03-14基金项目:四川省重点研发项目(2023YFG0122)
作者简介:周志强(1996-),男,河南商丘人,硕士,主要研究方向为计算机图形学;吴桐(1997-),男,福建漳州人,硕士,主要研究方向为计算机图形学;张严辞(1975-),男(通信作者),四川成都人,教授,博导,博士,主要研究方向为计算机图形学、并行绘制、虚拟现实、基于GPU的通用并行计算、3D游戏技术(yczhang@scu.edu.cn).
