基于双闭环自适应整定PI 变频逆变电源的研究
2023-10-17李宁
李宁
(江苏广识电气有限公司,江苏徐州 221000)
目前,基于变频器驱动的异步电机已被广泛应用到生活及生产之中,变频器驱动的关键技术在于对逆变器的控制,逆变电源的控制主要采用PI调节器控制,传统的PI控制具有很多优点,但是对于一些现场运行负荷复杂的异步电机驱动的场合,设定固定的PI参数已无法满足需求。
针对以上问题,本文提出一种基于双闭环自适应整定PI算法变频逆变电源控制方法。
1 系统模型
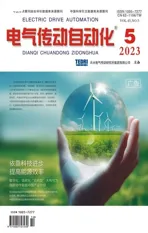
为简化研究,本文模型采用单相全桥结构逆变器。如图1所示,为基于LC滤波的逆变器的主电路图,逆变电源负载阻值为R。
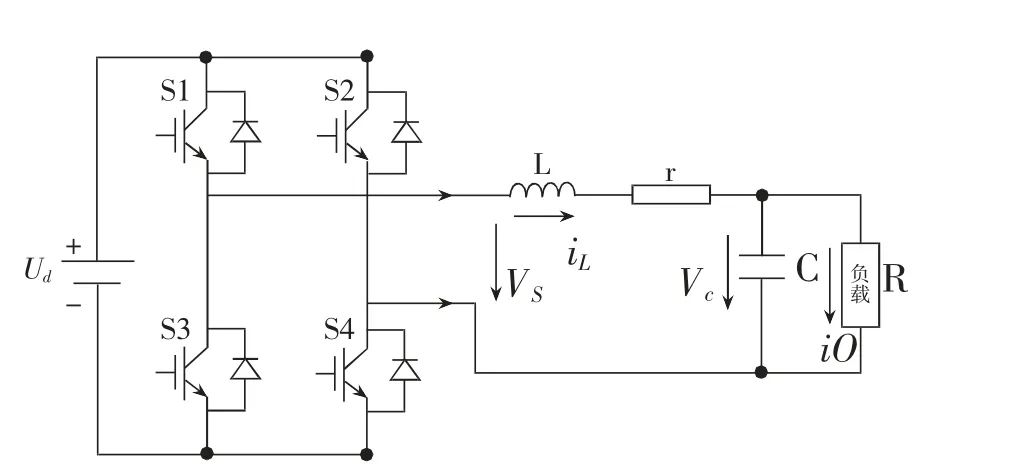
图1 单相全桥逆变器图
可列出逆变器的系统的状态方程如下式:
用以上得到的逆变电源状态空间方程,根据拉普拉斯变换推导可得传递函数模型为:
当单相逆变器空载时,即R=∞时,在连续域的传递函数为:
通常滤波电感等效内阻R非常小,可忽略不计,因此,逆变器可作为无阻尼二阶振荡环节的数学模型来进行研究[1]。
2 双闭环变频逆变电源控制方法
当采用开环控制,式(2)中,取电感L=1mH、电容C=100μF、内阻r=0.05Ω,如图2所示,当采用开环控制,随着负载阻值R的增大,谐振峰值也随之增大,动态性能很差,且具有振荡性,系统稳定裕度很小,谐波被LC滤波器放大从而引起谐振[2]。
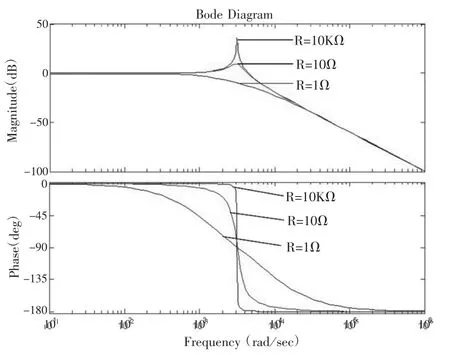
图2 开环控制系统带不同负载时的波特图
如图3所示,为电感电流内环、电压外环的双环反馈控制结构框图。
图3 逆变电源双闭环控制框图
空载时,传递函数为:
带载时,传函为输出阻抗:
取相同的系统参数,根据式(5),双闭环反馈控制系统bote图如图4所示。可以看出谐振尖峰被消除,改善了系统的振荡问题,增大了系统的稳定裕度。
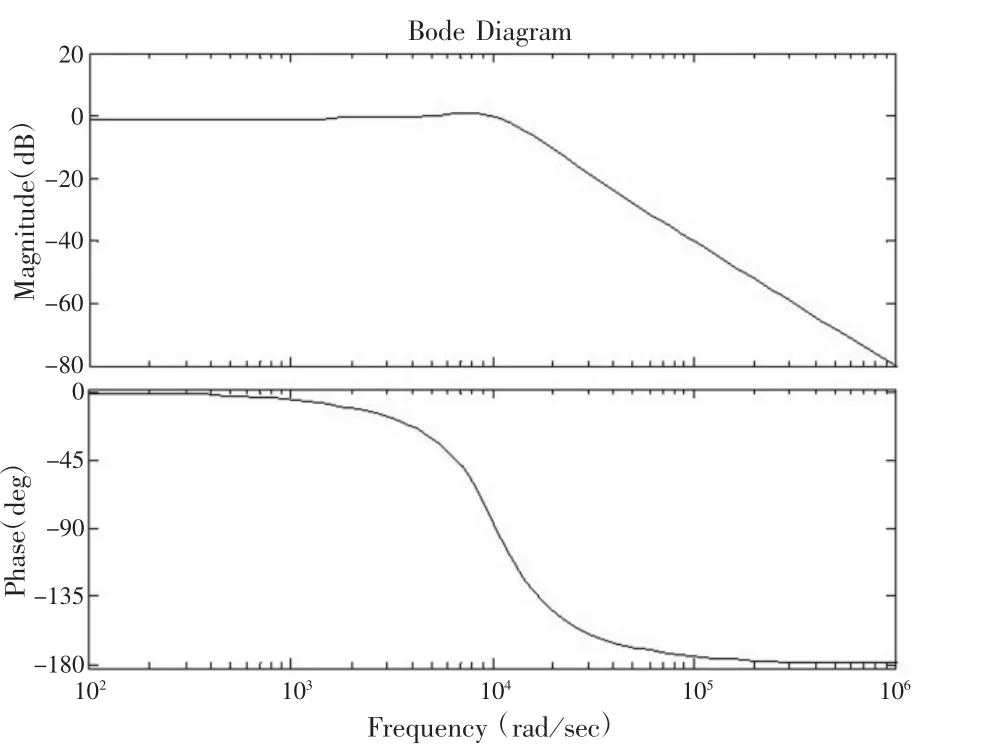
图4 双闭环控制系统波特图
3 控制系统设计
3.1 控制系统总体结构设计
如图5所示,为变频调速系统框图。ωs*为速度调节器的输出信号,同时作为转差频率给定信号,与实测转速信号ω 做加法运算,得定子频率给定信号ω1*,即:
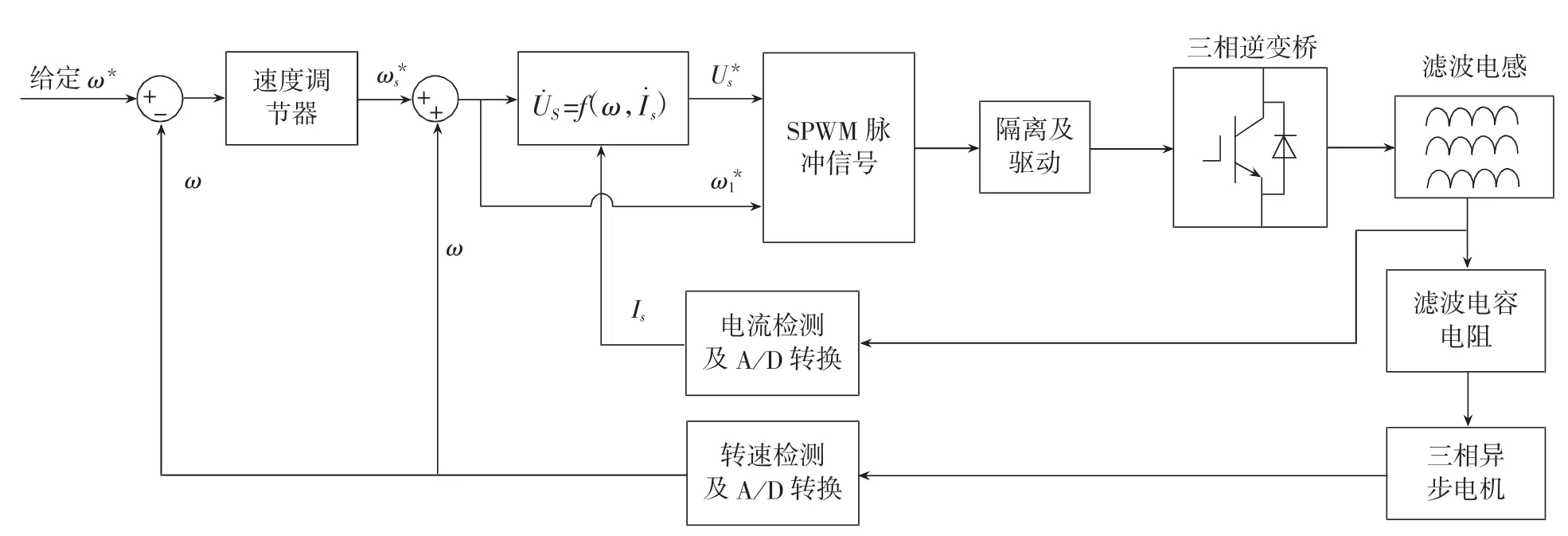
图5 控制系统总体结构框图
可根据函数关系Us=f(ω1,Is),通过查表法得到定子电压给定信号Us*与定子频率给定信号ω1*,共同控制PWM电压型的逆变器得到调速所需变压变频逆变电源[2]。
3.2 数字PI闭环调节器算法设计
在传统PI控制中,比例系数Kp和积分系数KI的作用[3]:当系统出现偏差,比例调节Kp立即作用,快速减少系统偏差。但是当Kp过大,会出现较大的超调量,系统不稳定。积分作用Ki的作用是消除系统稳态误差,积分作用同样会使系统不稳定,并且动态响应速度变慢。
对PI控制算法参数的整定,需要根据响应速度、超调量、稳定性和稳态精度等指标综合做出判断,得出PI参数与误差e和误差变化率ek之间的关系。连续检测e和ek,对PI参数进行实时动态调整,来满足不同e和ek的自适应整定要求。由此可以得出在不同的e和ek时,Kp、KI的自整定方法如表1所示[4,5]。
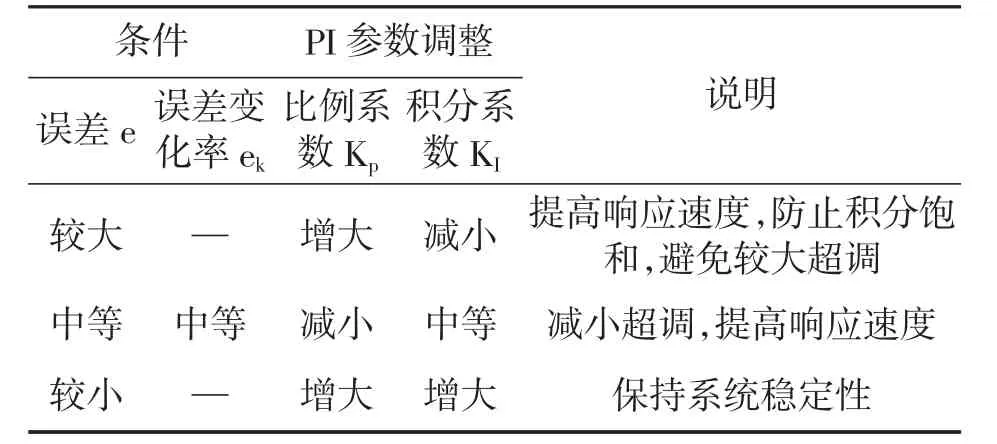
表1 控制关系表
3.3 改进的数字PI算法程序设计
本系统采用的数字PI算法,重点考虑了对KP、KI参数的整定,从而使PI控制器能够在非线性的时变逆变器中得到更好的应用。系统采用转速闭环、转差频率控制的变压变频调速方法,控制算法实现方法采用常规查表法和自动调节方法。本系统采用的数字PI控制算法对KP、KI的调节是首先通过常规查表法得到大概的参数值,再通过不断的自动调整得到较为准确的参数值。数字PI控制算法的程序设计流程图如图6所示。
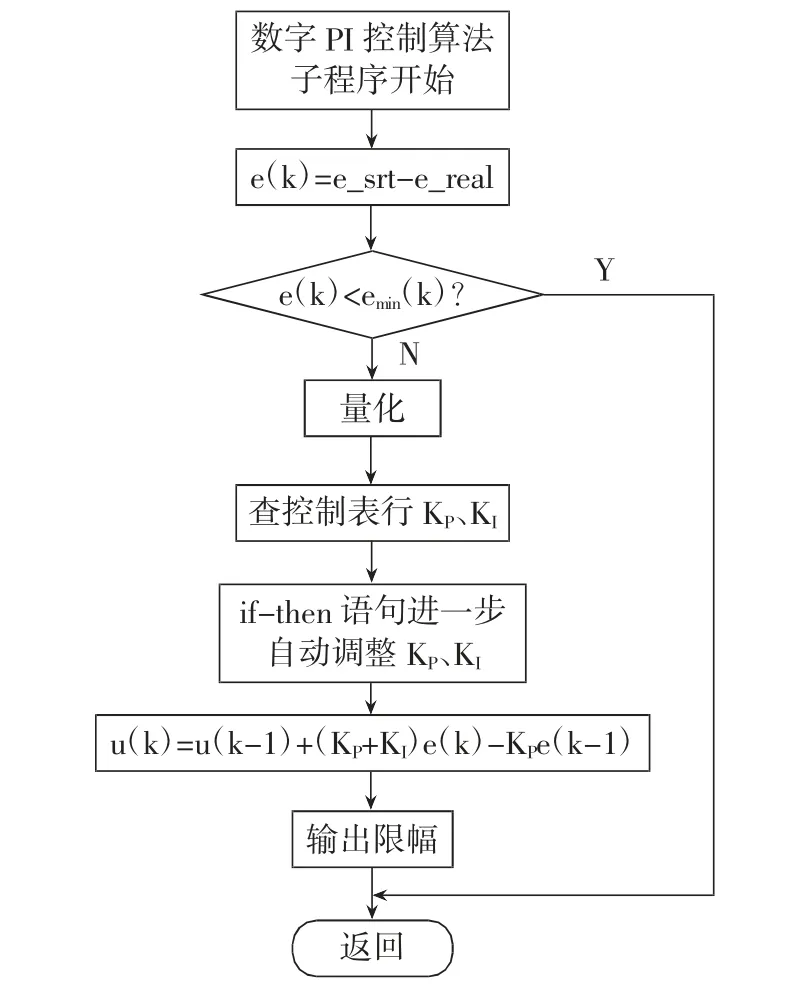
图6 数字PI算法程序设计流程图
4 仿真研究
如图7所示,建立Matlab/Simulink系统仿真模型。负载扰动是影响逆变电源性能的主要因素,逆变电源负载按是否线性可分为线性负载和非线性负载,线性负载中只含有基波分量,非线性负载中除了基波成分还包含了大量的谐波分量,基波影响逆变器输出电压偏差,谐波影响输出电压的畸变。

图7 系统仿真模型
在本系统中,通过改变转矩来改变逆变电源的负载,系统仿真的采样时间为Ts=10μs,设定系统给定转速为1500r/min,转矩t=2.5s,由0变为14.795N·m,如图8(a)所示,系统开环控制,当转矩由0变为14.795N·m,转速下降了100r/min;如图8(b)所示,系统闭环控制,在t=2.5s之后,即转矩由0变为14.795N·m,又回到了转矩变化之前的转速,满足系统要求。
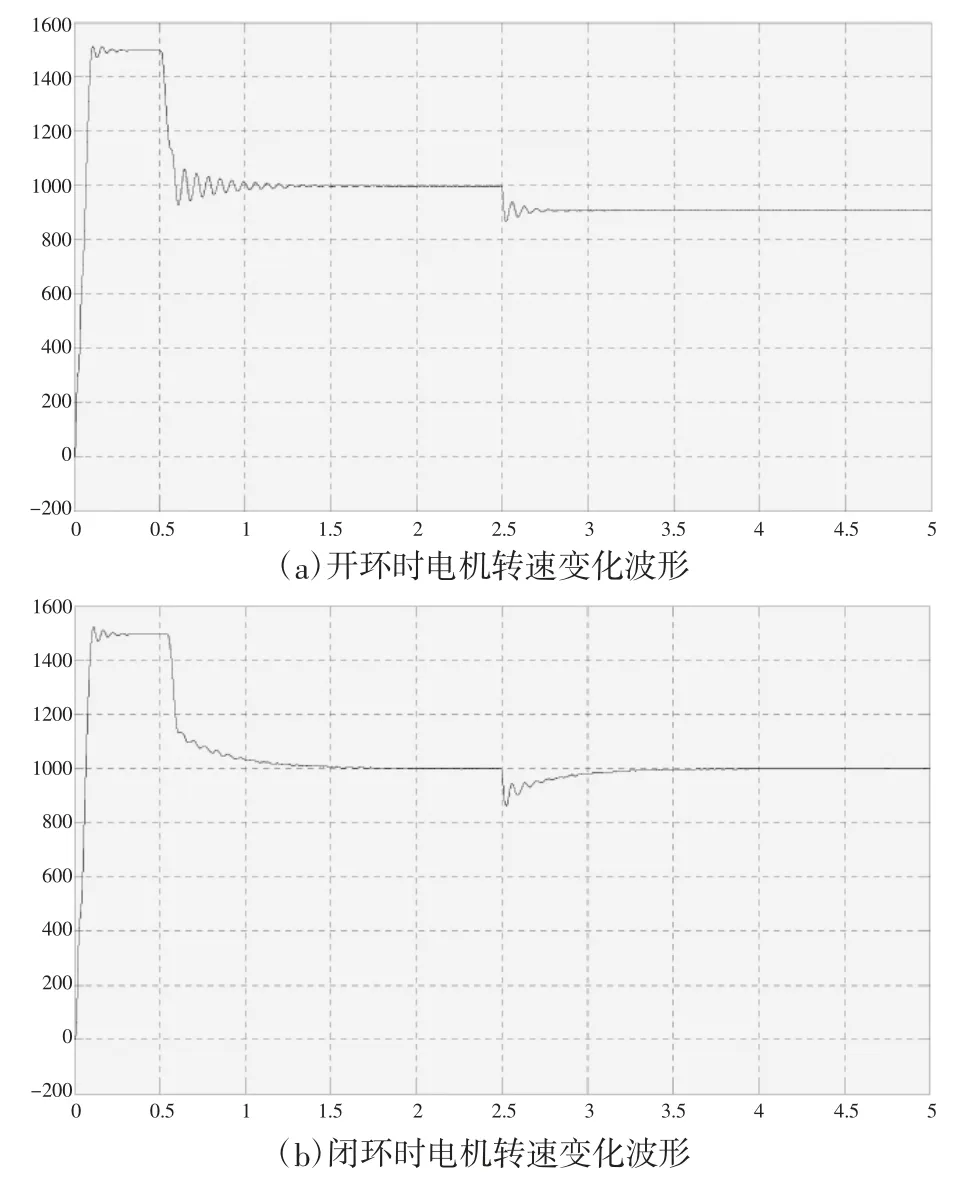
图8 系统在开环和闭环控制下的电机转速波形
5 结论
本文研究了交流变频调速技术,重点对转速闭环、转差频率控制的变压变频调速技术进行了探讨,介绍了控制器的相关控制算法,对控制系统的总体结构进行了设计,采用一种改进型的双闭环自适应整定PI控制算法,并对实现方法进行了详细的描述。对建立的数字控制系统在Matlab/Simulink中进行了仿真验证、对影响逆变电源性能的因素进行了仿真分析,仿真实验结果证明了变频逆变电源数字控制系统的可行性,同时表明所选用的控制策略在改善电机调速性能方面取得了良好的效果。