车客渡船全回转舵桨控制系统优化
2023-10-17毛绍兵
毛绍兵
(南京市板桥汽渡服务中心,江苏 南京 210039)
0 引言
长江是我国重要的黄金水道,航行的船舶非常密集。长江汽车渡船作为穿梭长江南北主航道的特种船舶,其航行的安全可靠性非常重要[1]。49 m车客渡船的推进器系统、动力系统、全回转舵桨控制系统的配备按冗余要求配备,该船配备2套全回转舵桨装置,一套全回转舵桨配一套控制系统,可以保证汽车渡船在航行营运中如果一套控制系统发生故障,另一套控制系统正常工作。这种配置方案虽能确保船舶基本安全但风险很大。实际营运时发生故障后,该船推进动力严重不足,其他正常航行的船如不主动避让极易发生碰撞,引发重大水上交通事故,尤其是汛期航道水流流速急、通航船舶密度大,发生安全事故几率更高。
针对全回转舵桨控制系统存在的缺陷,本文对舵桨控制系统的西门子S7-1200可编程序控制器的输出模块和程序进行优化,使得输出模块的重要输出点有冗余,与之相关的程序也有冗余,这样可有效预防、消除控制系统输出模块突发故障引起全回转舵桨失控问题,从而确保车客渡船航行安全。
1 全回转舵桨装置控制系统组成
本文研究的车客渡船全回转舵桨控制系统是由西门子S7-1200系列可编程序控制器构成的随动电液控制系统(见图1)。驾驶人员操纵驾控台舵桨控制板操舵手轮全向旋转实现舵桨全回转控制,转动操舵手轮同时控制手轮与控制板夹角实现推进主机油门控制,全回转舵桨和油门通过反馈装置构成闭环反馈系统。上述2个信号直接进入中央控制箱PLC模块处理输出执行,中央控制箱则由西门子S7-1200系列可编程序控制器构成舵桨控制系统。
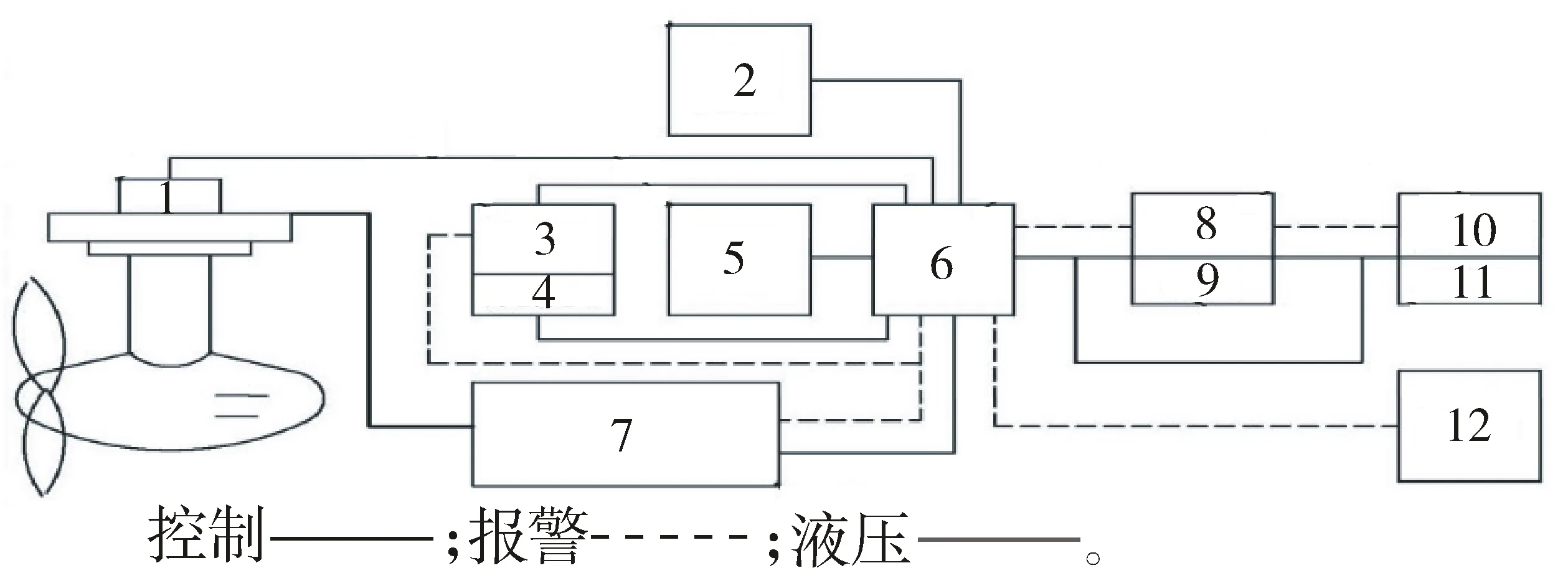
1—反馈装置;2—应急泵启动箱;3—离合器;4—测速传感器;5—速度执行机构;6— 中央控制箱;7—液压系统;8—前操纵面板;9—报警板;10—后操纵面板;11—报警板;12—报警输出。
2 全回转舵桨装置的控制原理
全回转舵桨装置控制指令与反馈电位器的电源电压为9.5~10.0 V,其为双滑臂型电位器,设置电位器电压对应的角度为0~2.5 V/0°~90°,2.5~5 V/90°~180°,5~7.5 V/180°~270°,7.5 ~10 V/270°~0°;电位器的旋转位移中间成线性连续变化,指令值在反馈值前为右转即右舵,反之为左舵。驾驶人员旋转操舵手柄时,转舵指令电位器发生位移,每转一个位移就产生一个电压模拟量。这个电压模拟量输入PLC进行逻辑运算,输出模块驱动相应的转舵液压系统电磁阀推动全回转舵桨左右旋转。舵桨反馈装置带动反馈电位器位移,直到反馈电位器的电压与指令电位器电压相等即两电位器电压差为零。输出模块立即停止驱动转舵液压系统电磁阀,全回转舵桨则停止旋转,驾控台舵角指示器指针与水下舵角一致(舵角即为推力方向),不断旋转驾控台操舵手柄方向就可改变推力方向,从而改变渡船行驶方向。
推进主机速度控制系统也是一个闭环随动系统。推进主机速度控制指令电位器与反馈电位器电源电压为9.5~10.0 V。这2个电位器均为单滑臂型电位器,电源电压为0-5 V-10 V,5 V为中间值。主机速度由怠速680 r/min至高速1 750 r/min,设定具体如下:0 V、680 r/min,5 V、1 200 r/min,10 V、1 750 r/min。电位器的旋转位移中间呈线性连续变化,通过操舵手轮上的速度控制手柄来实现(手柄与控制板夹角)。在随动工作状态时,手柄处于垂直状态,速度指令电位器的电压信号和反馈指令电位器的电压信号一致,主机处于怠速状态。当操作人员将手柄下压,手柄带动指令电位器转动,原有的平衡被打破,主机加速,同时主机执行机构内的电机得电动作带动反馈电位器旋转,直到反馈电位器与指令电位器电压信号一致,主机停止加速。手柄回位至竖直位置,主机则减速至怠速状态。
3 全回转舵桨控制系统改进
3.1 推进主机速度控制改进
改进前控制系统发生故障后,立即接通驾控台速度随动/应急备用开关使继电器b13K2动作切断继电器b13K1工作,b13K1继电器常闭点立即复位将速度执行装置切换至手动应急操纵线路,这时驾驶人员根据需要不断操纵按钮。
全回转舵桨推进主机速度控制系统主要做了如下改进(见图2):
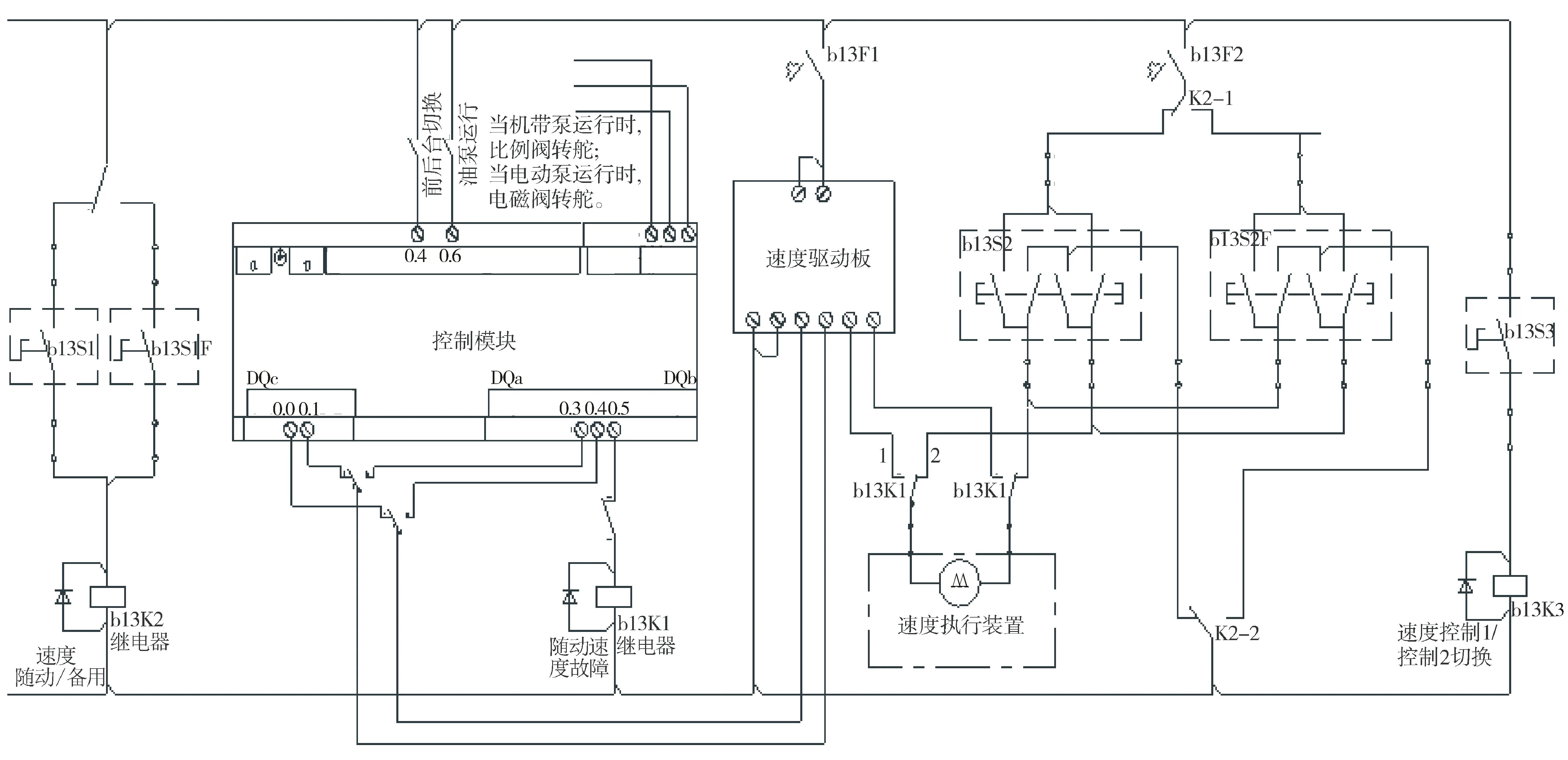
图2 推进主机速度控制电路图
驾控台上首先增加了转换开关b13S3、切换继电器b13K3(即速度控制1/控制2切换),其次增加了输出点DQa端Q0.3和Q0.4驱动(与输出点DQe端Q0.0和Q0.1冗余)。
正常情况下转换开关b13S3处于断位(即速度控制1位),继电器b13K3不动作,推进主机的速度控制由控制系统输出点DQe端Q0.0和Q0.1驱动。当输出点DQe端Q0.0和Q0.1驱动发生故障,立即将开关b13S3切换至速度控制2,b13K3继电器动作将输出点DQe端Q0.0和Q0.1切换至输出点DQa端Q0.3和Q0.4,以保持控制系统正常工作。控制软件按上述要求改进编制。
经旧船和新船验证,改进后的控制系统消除了车客渡船原有控制系统缺陷,使船舶航运更加安全可靠。全回转舵桨控制系统改进后原应急系统继续保留(控制系统改进后有3种模式)。
3.2 舵桨转舵控制系统改进
原全回转舵桨转舵控制系统主要工作过程如下(见图3):
(1)正常工况下,全回转舵桨转舵由机带泵驱动,应急时立即切换至电动泵。
(2)机带泵运行时DQa端输出点Q0.1通过常闭点b14K2接通继电器b14K1,继电器b14K1动作接通比例阀驱动板,DQa端输出点Q0.0和Q0.2通过比例阀驱动板控制随动操舵比例阀。
(3)机带泵运行时,通过比例阀转舵;电动泵运行时,通过电磁阀转舵。
原控制系统若机带泵出现故障,可切换至电动泵运行,手动接通驾控台开关b14S1或b14S1F,继电器b14K2通电动作,使继电器b14K1失电触点复位比例阀驱动板失效,转至驾控台手动控制应急操舵电磁阀,比较繁琐。针对原系统的缺陷进行了改进,增加DQa端输出点Q1.0和Q1.1作为应急操舵驱动,即驱动应急左舵继电器b14K12和应急右舵继电器b14K13。改进后的控制流程为发生故障手动接通驾控台开关b14S1或b14S1F,继电器b14K2通电动作,使继电器b14K1失电触点复位比例阀驱动板失效,DQa端输出点Q1.0和Q1.1激活,操纵转舵手柄模块确定Q1.0动作还是Q1.1动作,即应急左舵继电器b14K12动作还是应急右舵继电器b14K13动作。动作的继电器触点直接接通相应的应急操舵电磁阀,保证了船舶安全可靠航行。这个过程和正常工况下操舵基本一致。相应的PLC程序按动作要求编制。
4 结论
改进优化了几艘原有车客渡船的控制系统,并将改进优化的成果应用与新造船,经实船验证非常成功。概括总结如下:
(1)利用PLC模块备用输出点,增加少量器件,使得控制冗余,提高了系统可靠性和航行安全性。 (2)改进后的控制系统在应急工况下船员操纵舵桨装置与正常工况基本一致,减少了繁琐的动作,减轻了船员工作强度。
(3)改进后的控制系统保留原来的应急手动操纵模式,使得舵桨控制更加可靠。
