一种新的协作机器人人机用电容式多维力传感器设计
2023-10-17
(1.甘肃交通职业技术学院,兰州 730050;2.兰州理工大学 电气工程与信息工程学院,兰州 730050;3.甘肃省秦安县兴国镇农业农村综合服务站,甘肃 秦安 741600)
0 引言
精密操控、柔性装配、高效精细加工、光纤对接、精细外科辅助手术等场合都需要高精度、低耦合、高分辨率、强刚度的力传感器来保证操控的精确性和可靠性,而现有的机器人多维力传感器很难满足这种需求[1-3]。
多维力传感器可同时感知两维至六维的空间力和力矩信息,将多维力传感器引入诸如医疗康复机器人、手术机器人、外骨骼机器人、智能轮椅、柔性装配机械臂等智能设备中使得设备可以感知与外界的作用力,基于作用力的信息通过合理的控制算法可实现设备与使用者或外界环境间作用力的控制,保证了人与机器之间协作作业的安全性[4-5]。
六维力传感器是人机协作机器人的重要部件,目前使用较为普遍的是应变式和压阻式多维力传感器,这种传感器存在信号需要放大调理、制作工艺难度大、成本较高等不足之处[6-7]。
基于以上分析,结合实际的应用场景,本文设计出一种基于应变片阻值测量的新型电容式多维力传感器,该传感器安装固定和拆卸无需使用螺丝刀、扳手等专用工具,省时省力,而且所有的传感原件都印刷在单个电路板上(缩写为PCB),无需布线,制造过程显着简化。仿真研究证明本文设计的电容式多维力传感器具有输出信号幅值大、无需放大、抗干扰能力强、无需粘贴应变片等元器件,易于实现小型化、成本较低等优势。
1 传感原理
1.1 平面中的双轴力传感
平行板电极型电容器极板距离与电容之间的数学关系[8],如式(1)
(1)
其中,ε为两极板间介质的介电常数;S为两极板间的相对有效面积;d为两极板间距。当极板间距d改变为Δd时,初始电容C的改变量为ΔC1,如式(2)
(2)

(3)
(4)
图1说明了电容式双轴力传感器的实际设计。同一平面上两个并联电容器,底部电极用印刷电路板来实现,顶部电极作为一个整体接地,在实体金属中开槽可以起到上极板的作用,进一步简化了传感器的结构,只需一块印刷电路板(PCB)即可实现。
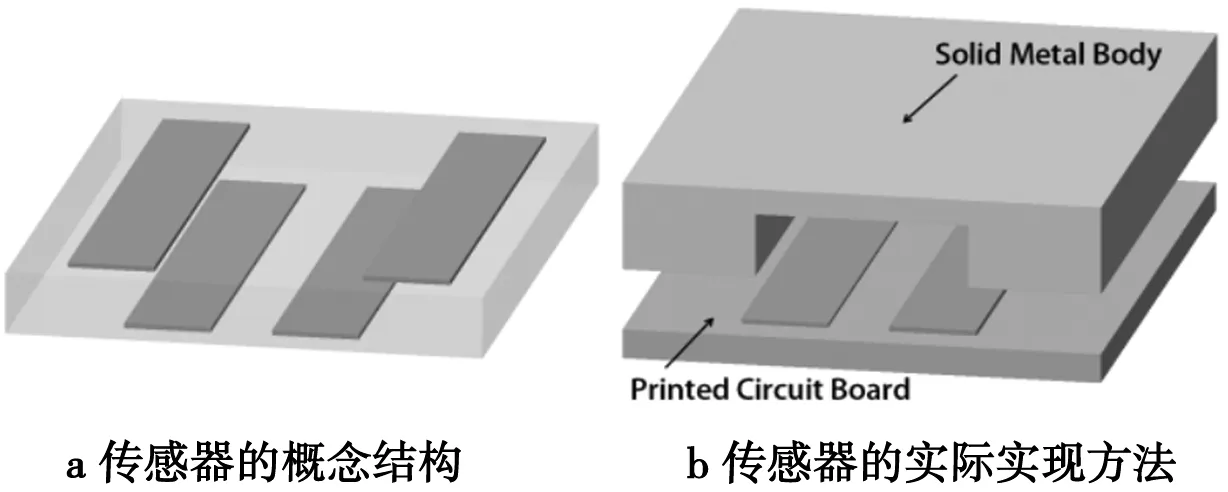
图1 电容式双轴力传感器在平面上的结构
这样,可以使用平板电容器作为力传感元件。如果给上电极板施加一个法向力,垂直电极距离d将缩短,电容量C就会增加,如图1a所示,因此,通过电容量的变化可以计算出法向力的大小。到目前为止,大多数单轴或多轴力传感器采用上述原理电容法[4]。平行板电容器的一个显著属性是剪切力引起的电极水平偏移导致电容量的变化,如图1b所示。
1.2 平面中的六维力传感器
图2为传感元件阵列的俯视图,六个传感元件在圆形盘中对齐,顶部电极为棕色,底部电极为绿色的,电极连接到弹性圆盘的顶部和底部,上部电极以棕色显示,下部电极以绿色显示,构建了三个双轴力传感器。如果在圆盘的上表面施加一个外力,上下电极的相对位置随之改变[5]。

图2 六维力传感网俯视图
位移导致电容变化,例如,当施加Fz时,所有电容器的电容都会降低,施加Mz力矩时,电容器1、3和5的电容增加,而2、4、6电容器的电容量由于顶部电极水平位移而减少[6],具体情况如表1所示。
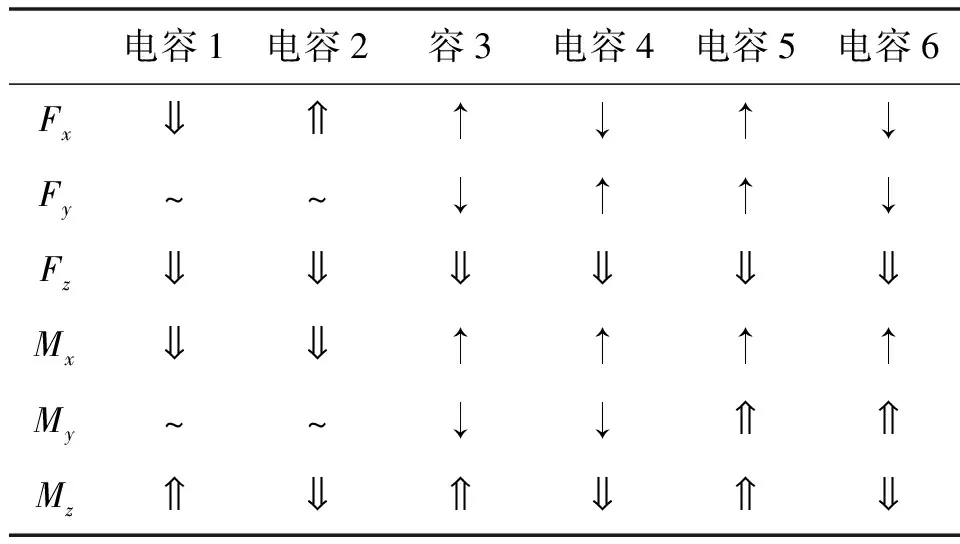
表1 电容随施加力的方向而变化
(5)

(6)
上式中,N是6×6的对角矩阵,矩阵元素代表感应范围的最大值该矩阵元素值由实验确定。
2 改进的电容多维力传感器设计模型
通过弹性结构感应外界载荷,载荷作用下使得弹性结构产生形变,该形变改变了电容阵列之间的间距和有效面积,从而使得电容阵列电容值产生变化,在一定的载荷范围内,电容阵列的电容值变化与外载荷呈线性相关关系[9-11],因此可通过检测电容值的变化从而获得外载荷的大小,本文设计的电容式多维力传感器结构形式如图3所示。
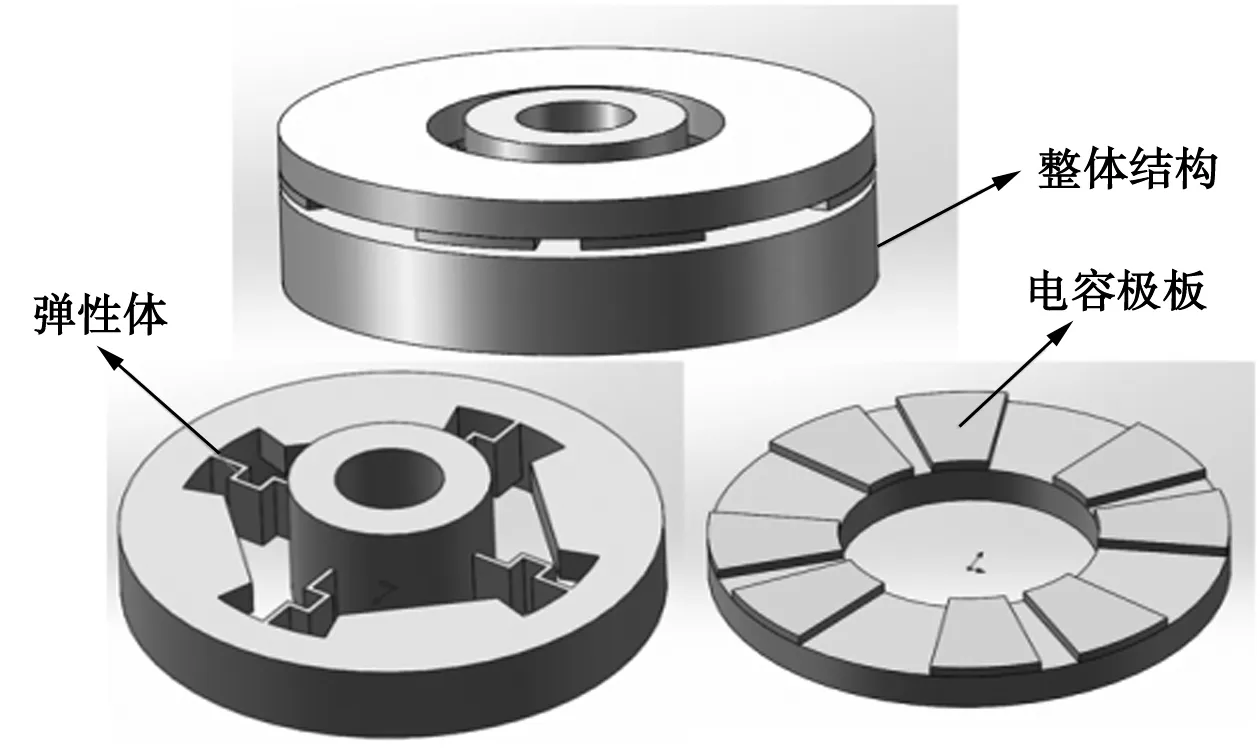
图3 改进的电容式多维力传感器结构形式
3 仿真环境及方法
由于电容式多维力传感器的传感过程中涉及弹性力场和静电场两个物理场,且两者之间为双向耦合关系,即弹性体在外载荷作用下的弹性变形使得静电场产生变化,静电场的静电力变化又对结构变形产生影响[12]。因此,本仿真采用COMSOL多物理场仿真软件中机电耦合模块进行仿真分析,该分析工具分析在电容式多维力传感器的电容阵列容值在力场、静电场耦合效应作用下与特征参数集、外载荷之间高保真度的映射关系,仿真参数设置如图4和图5所示。
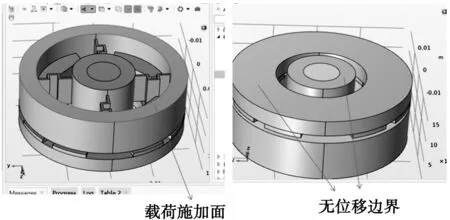
图4 结构边界载荷(XYZ各轴定义如图)
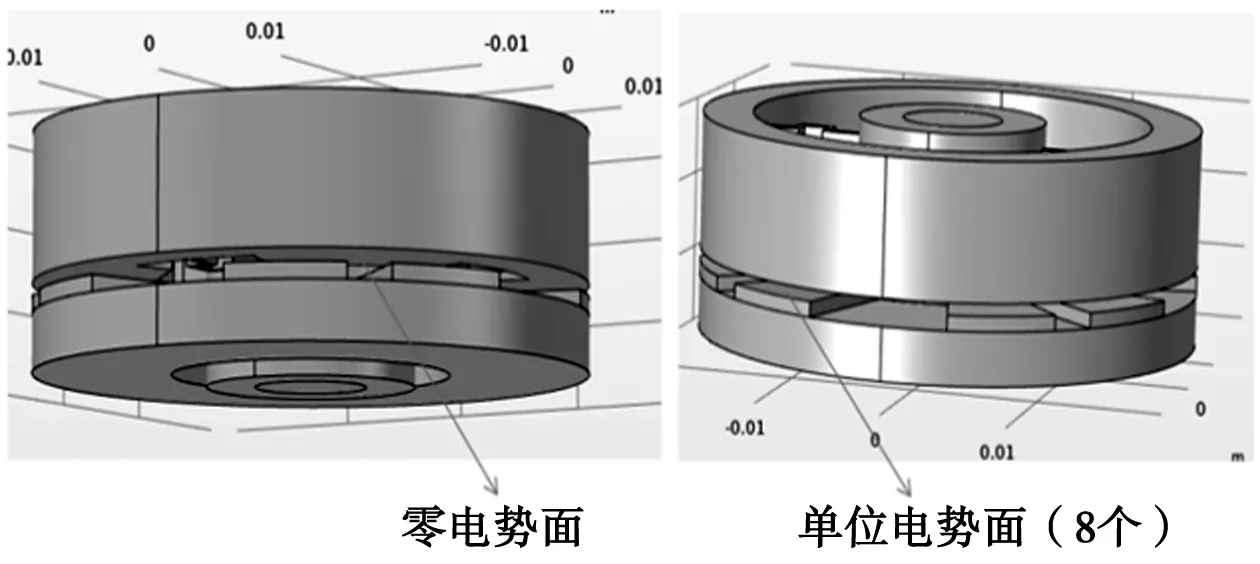
图5 静电场仿真设置
4 仿真分析
通过对外加载荷进行参数扫描分析,获得在不同载荷下电容阵列的各个电容值的变化,本设计中为8个电容值,即C1、C2、C3、C4、C5、C6、C7、C8。该外界载荷沿各轴的投影分别定义为:Fx、Fy、Fz、Mx、My、Mz,如图6所示。
根据图6可知,通过各电容变化的趋势可看出本文设计的电容式多维力传感器在输出信号幅值无需放大的情况下可以具有高度灵敏性、分辨率和运行稳定等优势,进而验证了该电容式多维传感器易于实现小型化、成本较低和结构简单等特点,简化结构是通过平面内配置实现的并联板电容器。因此低成本的大规模生产是可实现的。
5 结论
本文通过设置仿真参数载荷施加面、无位移边界、零电势面和单位电势面,采用COMSOL多物理场仿真软件中机电耦合模块,通过对外加载荷进行参数扫描分析,获得在不同载荷下电容阵列的各个电容值的变化来分析该设计的可行性及合理性,本文设计的传感器克服了传统传感器体积大(因为粘贴了应变片等元器件),而该新型多维电容式多维传感器无需粘贴电器元件,而是采用容值的变化来感知外部信息,所以简单、易于制造,可实现小型化作业。期望该传感器可广泛应用于各种机器人生产加工,这将有助于机器人在市场上的普及。
