MCGS 组态技术在PLC 项目化教学中的应用*
2023-10-15常州大学微电子与控制工程学院蒋建明郝振华王雪刘志超史兵
常州大学微电子与控制工程学院 蒋建明 郝振华 王雪 刘志超 史兵
西门子S7-1200PLC 项目化教学中许多变量在控制过程中不断变化,博途编程软件的状态监控难以全面监控各变量实时变化。MCGS 组态软件可以通过对现场数据采集处理,以动画显示、数值显示等方式解决工程问题。本文分析了S7-1200 的伺服运动控制,结合MCGS组态监控,为项目化教学提供了更为直观的控制效果。MCGS 上位机编程和PLC 底层程序设计融合项目化教学有利于提高学生工程应用能力。
随着计算机科学与工业化技术的飞速发展,传统的工业控制软件已难以满足数据采集和过程控制需求。MCGS(Monitor and Control Generated System)是一种用于快速构造和生成计算机监控系统的组态软件,通过对工业现场数据的采集、以动画显示、报警处理、流程控制和报表输出等形式解决系统工程的监控需求[1]。
如图1 所示,MCGS 组态软件由主控窗口、设备窗口、用户窗口、实时数据和运行策略五部分组成,组态结果数据库完成了MCGS 系统从组态环境向运行环境的过渡[2]。

图1 MCGS 组态软件结构图Fig.1 Structure diagram of MCGS configuration software
1 PLC 程序设计及MCGS 组态
1.1 S7-1200PLC 程序设计
在西门子S7-1200 伺服控制项目化教学过程中,S7-1200PLC、V90(PN)伺服控制器和MCGS 触摸屏通过以太网通信。在运动控制中,轴与机械负载直接连接,可以驱动负载完成旋转运动、直线运动等,还可以多轴协调运动[3]。S7-1200 和V90(PN)通过以太网通信实时传输用户/进程数据以及诊断数据。伺服驱动器内部集成抱闸继电器,当使用带抱闸电动机时可直接控制电动机动作。V90 的驱动和电动机可以达到3 倍的过载能力,具有电动机转矩波动低,参数设置图形化的特点,还具有通俗的电机状态界面监控和高效的示波及测量功能,集成了安全扭矩关断功能,能防止电动机意外转动[4]。
S7-1200 控制运动时,支持运行中更改电机的速度和位移,西门子博图编程软件中通过添加伺服轴工艺对象,V90 使用标准报文3,通过MC_Power、MC_MoveAbsolute等PLC Open 标准程序块进行中央控制模式[5]。在程序控制中主要完成启动/禁用轴、回原点、点动伺服正反转、绝对位移移位、相对位移移位、错误确认、读取伺服位移位置以及伺服运动速度功能[6]。
S7-1200 的运动控制组态支持脉冲控制(PTO 控制)和PN(PROFINET)网络控制,支持闭环控制,在对驱动器进行PTO 控制时,可对轴进行速度控制和开环控制。
1.1.1 伺服控制功能指令
如图2 所示,启动/禁用轴(MC_Power)指令功能是使用轴或禁用轴。
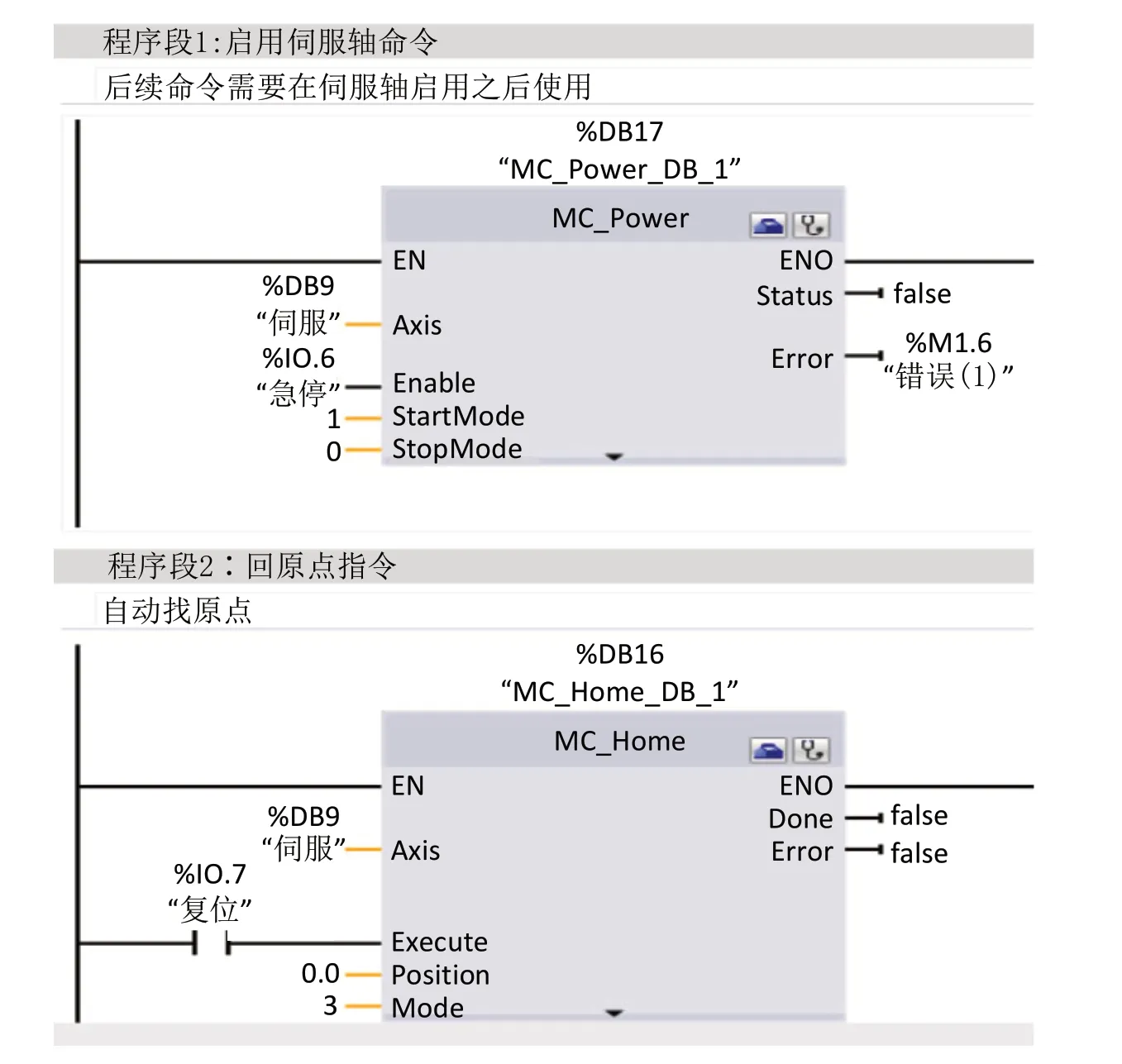
图2 启用、回原点功能指令Fig.2 Enable and return to origin function commands
(1)N:该输入端是MC_Power 指令的使能端,在程序运行时必须一直调用。
(2)Axis:与添加的DB9“伺服”轴工艺连接。
(3)Enable:在工业控制中用于在特殊情况下急停,本系统中链接至S7-1200 的I0.6 输入端。
(4)Startmode:轴启动模式,0 表示启用位置不受控的定位轴即速度控制模式;1 表示启用位置受控的定位轴即位置控制。
(5)StopMode:轴停止模式,0 表示紧急停止,如果禁用轴的请求处于待决状态,则轴将以组态的急停减速度进行制动;1 表示立即停止,如果禁用轴的请求处于待决状态,则会输出该设定值 0,并禁用轴。轴将根据驱动器中的组态进行制动,并转入停止状态。
1.1.2 回原点
如图3 所示,回原点指令MC_Home 的功能是使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。
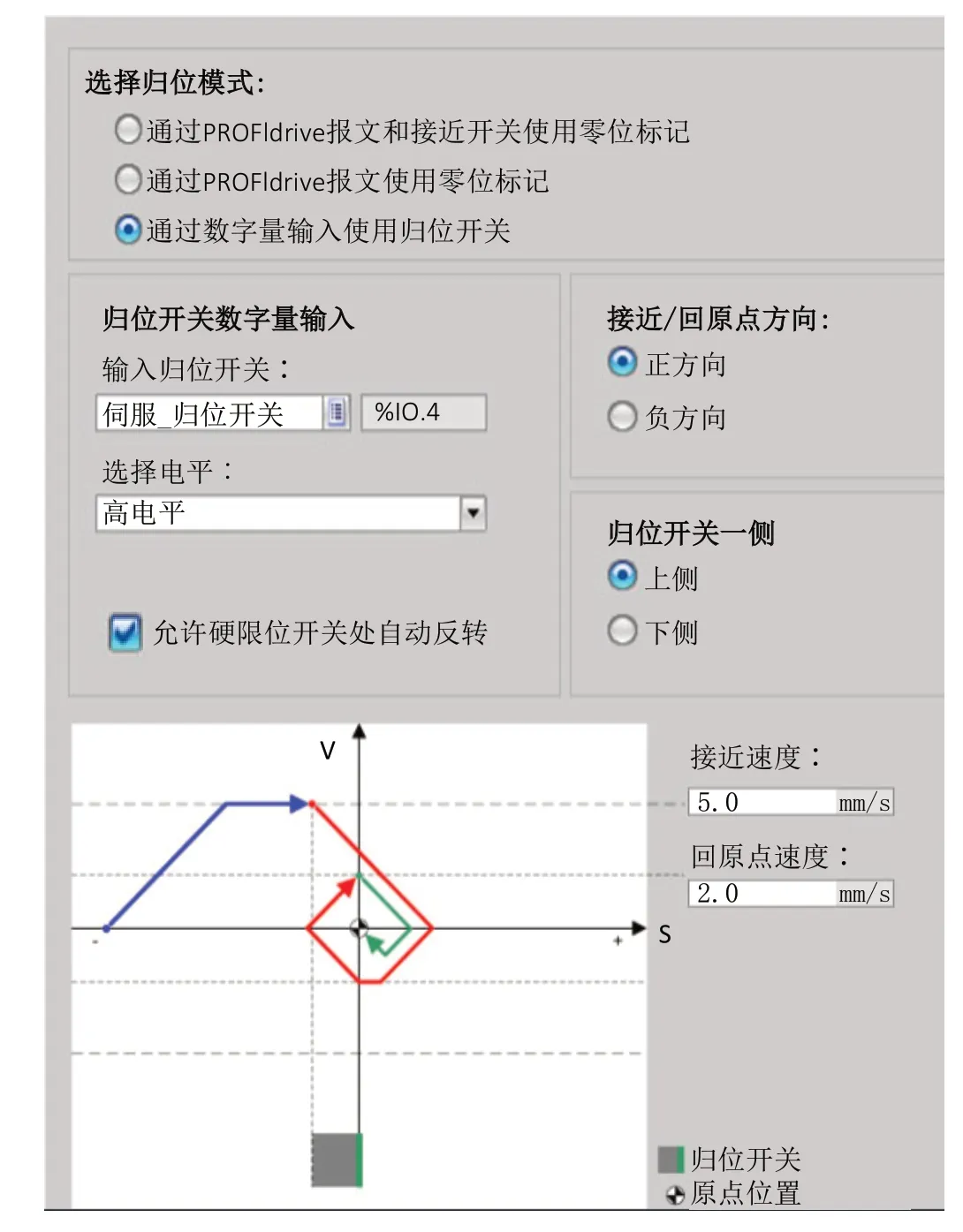
图3 回原点指令设置Fig.3 Back to origin command setting
(1)接近速度设置为5.0mm/s,回原点速度设置为2.0mm/s。接近速度为寻找原点开关的起始速度,当程序中触发了MC_Home 指令后,轴立即以“接近速度”运行来寻找原点开关。轴以“接近速度”运行寻找原点开关时,当轴碰到原点开关的有效边沿后轴从“接近速度”切换到“回原点速度”来最终完成原点定位。“回原点速度”要小于“接近速度”,“回原点速度”和“接近速度”都不宜设置得过快。
(2)Axis 同样与DB9“伺服”轴工艺连接;指令执行位(Execute)连接到S7-1200 的I0.7,如果需要在MCGS 控制界面上控制回原点,只需要与I0.7 并联一个PLC 的M 存储器二进制位。
Mode=3 表示主动回零点,轴的位置值为参数“Position”的值。
1.1.3 点动伺服正反转
手动正反转、绝对定位指令如图4 所示,在点动模式下以指定的速度连续移动轴。

图4 手动正反转、绝对定位指令Fig.4 Manual forward and reverse,absolute positioning instructions
JogForward:正向点动,不是用上升沿触发,JogForward为1 时,轴运行;JogForward 为0 时,轴停止。类似于按钮功能,按下按钮,轴就运行,松开按钮,轴停止运行。JogBackward:反向电动。Velocity 用于设置点动轴移动速度。
绝对位置指令(MC_MoveAbsolute)表示使轴以某一速度进行绝对位置定位。
当与位置指令块“Execute”相连的M11.3(通过MCGS组态界面控制)有效时,轴移动到与“Position”相连的MD108 存储器中存放的坐标位置,移动速度由“Velocity”设定值控制。
相对距离指令(MC_MoveRelative)是相对定位轴指令的执行不需要建立参考点(原点),只需要定义距离、速度和方向即可。当上升沿使能“Execute”后,轴按照设定的速度和距离运行,使轴以某一速度在轴当前位置的基础上移动一个相对距离。
伺服运动位移及速度读取:S7-1200 分别通过MC_ReadParam 指令读取轴伺服运动的当前位移和当前速度。
1.2 上位机组态设置
MCGS 触摸屏、S7-1200 和V90 通信需要设置IP 地址在同一网段,如分别设置为192.168.1;192.168.2;192.168.3。打开MCGS 组态软件界面,在设备串口打开“设备工具箱”中的“设备管理”,找到Simens_1200 并安装,然后在“设备工具箱”中找到Simens_1200,双击添加。双击打开“设备编辑窗口”,在该窗口的远端IP 地址输入S7-1200IP 地址。设置完成后计算机上的组态软件与PLC 通过以太网通信。
2 运行结果
如图5 所示,MCGS 触摸屏监控了伺服运动的变化过程,实时显示了运动位置、速度,并可以在触摸屏上修改输入参数,加深了学生感性认识。
3 展望
MCGS 触摸屏与西门子S7-1200 通过以太网通信,有效监控了S7-1200 控制的伺服控制运动,既加深了学生对伺服运动的理解,也提高了上位机组态软件的编程能力。
