基于空间域特征的引信安全控制方法
2023-10-14宫雪峰李豪杰陈志鹏
宫雪峰,李豪杰,陈志鹏,于 航
(南京理工大学 机械工程学院,江苏 南京 210094)
现代战争中武器系统正经历从机械化向信息化、智能化和一体化方向发展的阶段。随着技术的发展,战场的环境愈加恶劣,为实现精确打击和高效毁伤的目的,弹药研究从无控弹过渡到有控弹,精确制导武器、弹道修正弹和巡飞弹等新型武器平台应运而生[1]。
引信是武器系统中弹药毁伤的关键子系统,其利用环境信息、目标信息或平台信息,确保弹药勤务和弹道上的安全,并按预定策略对弹药实施起爆控制[2-3]。引信的安全性至关重要,在有控弹发展的背景下,弹药会发生变轨行为,使得弹道不再是单调抛物线特征。在这种情况下,后坐力和离心力等传统环境激励将难以满足引信全寿命安全性要求,因上述原因导致的安全性事故并非小概率事件,如2013年印度无畏型巡航弹在某次试验过程中,飞行至4 500 m高度、飞行马赫数达到0.7且全弹已飞行15 min有余时,偏离预定轨迹,不得不终止任务;2022年6月俄军“萨姆”防空导弹发生了失控调头并撞向地面的严重安全性事故。
保障的引信安全性的关键在于对弹药时空关系的把控,指的是引信随弹药发射后经历的各阶段时间与空间范围内对控制量的识别,并根据上述信息进行的控制。在引信中这种研究通常是致力于提高毁伤效果的研究,如普承恩等[4]研究了基于扩展卡尔曼滤波(EKF)落点预测的二维弹道修正制导方法;贺强等[5]研究了基于比例因子的改进落点预测修正算法;黎海清等[6-7]研究了落点预测制导率的旋转稳定弹修正控制和制导火箭弹落点预测导引控制。上述研究都对提高弹药命中精度和毁伤效果做出了重要的贡献。
在安全与解除保险方面鲜有对空间信息特征的直接利用的研究。近年来,高智安[1]利用弹炮距离信息设计了引信安全起爆系统;秦禹[8]通过激光测距方法利用弹炮距离信息进行了系统设计与实现;徐建国[9]提出了基于弹炮间距和相对弹道高信息的引信软件化设计;在电子安全系统上,李少卿[10]设计了一种将弹目距离作为第三级解除保险激励的电子安全系统。上述方法可以满足传统弹药引信单次解保的安全性要求,但若应用于可变弹道轨迹的弹药中,仅依靠距离标量作为解保依据,且以设定阈值的思想判断距离信息,可能会出现将非正常弹道误判为正确弹道的情况,利用空间信息解保不能保证时空关系的准确对应,难以满足引信未来高性能、全寿命安全性乃至全域安全性的控制需求。
针对未来引信全寿命安全控制需求,本文提出了一种基于空间域信息的引信解除保险方法,明确了引信空间域的内涵,设计了基于马氏距离的空间域特征逻辑判别方法,为安全系统解保设计提供一种新的途径。
1 引信中的空间域
1.1 引信空间域概念及与引信安全的关系
空间域概念在数字图像处理中,指由图像像元组成的空间,但在引信中,空间域应从时空的角度思考,在引信概念范围中,指弹药在某一阶段,尤其是发射后的阶段中经过时间与空间位置的对应关系。弹药时空对应关系是引信保障安全性的依据,引信空间域的概念可从引信安全性概念入手。图1(a)展示了引信全域安全性要求示意图,此处的“域”指的是所有区域,是指在新型弹药出现的背景下引信在所能经历的所有环境下的安全性要求,这是一个基于发射平台和目标建立的坐标系,由引信传统安全性要求和新型弹药的特点相结合得来,横轴代表不同的区域,实线表示在传统安全性中已要求的内容,虚线代表全域安全性特有的内容。传统安全性的要求可以概括为引信勤务处理阶段作用率小于百万分之一、膛内时小于万分之一、发射后及安全距离前小于千分之一以下的作用概率及未爆弹处理阶段的“三自”要求,可以发现,全域安全囊括了各引信可能经历的各种工作模式,将引信全寿命期间经历分为了多个区域,不再像传统安全系统要求只关注安全距离以内的安全性,而是拓展为勤务处理阶段、发射阶段、安全距离区域内、弹道飞行区域、任务中止阶段、巡飞区域、回收弹药阶段、目标区域和使用后(未爆弹处理阶段)区域。
若广义地描述,可以将引信全域安全的要求浓缩成如图1(b)形式,即划分为安全域、待发域、使用后域和巡飞域,也就是引信空间域的内涵。安全域包括了弹药在膛内、出炮口、安全距离内及为满足全域安全要求的飞行弹道区域。在安全域内,安全系统可以发生解保动作,但要保障引信的安全性,不允许发生安全失效。在待发域内,引信可以允许进入待发状态,待发域的空间范围与弹药的种类与使命任务有关,待发域应是以目标为基准,若目标移动,则待发域也随之转移。使用后域就是弹药失去最佳起爆时机和位置后的区域,要求引信实现“三自”或自恢复保险状态。巡飞域是巡飞弹具有的特殊空间域,因巡飞弹具有巡飞等待作战命令[15-17]、可协同打击和可安全回收[18]的特点,在巡飞域中巡飞弹会出现安全状态与待发状态的相互转换过程,兼具安全域与待发域的特点。

图1 引信安全控制能力含义表述及空间域概念表述Fig.1 Schematic diagram of safety control capability of fuze and expression of space domain
1.2 引信空间域特征概念及与时空对应性的关系
根据上一部分介绍可知,弹药在不同的位置时引信需要完成的任务不同,引信安全性与可靠性要求和引信的时空信息存在着对应关系。空间域特征指的是可以描述引信在全寿命期间内,从某一阶段开始起,描述弹药经历的时间t与弹药的位置、姿态等空间位置的信息关系的特征,如在某一时刻弹药的三维坐标、高度、俯仰角等信息。引信空间域并非绝对,而是一个相对概念。当以发射平台作为基准时,此时空间域信息就是弹药相对发射平台的三维坐标和角度信息;当以目标为基准时,此时空间域信息就是弹目距离、交会角度等。空间域是一个范围概念,空间域特征与时间信息共同描述了弹药的时空对应关系,弹药的时空对应性可以表达为
X=(xyzt)T
(1)
式中:X为弹药的时空状态变量,是一个包括x,y,z三维空间坐标变量加上时间变量t的空间,在确定采样间隔后,令i代表采样点的位数,则每一个时间ti都有对应的空间坐标(xi,yi,zi)。时间变量t同样至关重要,其本身与空间位置特征联系还产生了对时效性的描述,是弹药某时在某处的直接表达,时效性同样是引信实现高性能安全控制与精准毁伤的重要指标。
1.3 空间域获取方法
引信对空间域特征的利用存在间接与直接两种方式,如图2所示。
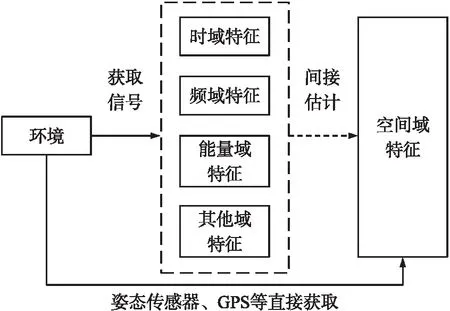
图2 引信空间域特征的两种获取方式Fig.2 Two methods of obtaining fuze spatial domain features
间接方式指的是在引信通过结构设计,直接获取环境的时域、频域或能量域等域的特征信号,通过一定的方法去近似估计空间域特征,实现对弹药时空对应性的把握,比如,时间药盘机构和钟表延期机构等可以将识别环境的实际拉长,从而获取环境激励的时域特征来估计安全距离并解保;安全解除保险结构中易熔合金由于飞行过程中产生的热能而熔化,以此实现弹药达到一定速度且持续一段时间后解除保险的目的;惯性筒与双自由度后坐保险可以通过自身的低通滤波特性分辨出跌落环境和发射环境并实现延期解保等[15]。
直接方式指的是引信通过雷达测距、GPS以及姿态传感器等方式直接获取空间特征。直接获取空间特征在制导武器中早已有了大量应用[16-17],例如通过雷达识别弹药与发射平台的距离从而判断弹药是否已经飞出安全距离、用加速度传感器识别弹药过顶点信息解保,也有利用实际弹道与基准弹道的对比、对比实际落点与预期落点的偏差以及利用毫米波或激光等方式测量弹目距离实现精确打击等。可以看出,引信对空间域特征的利用对提高弹药毁伤效能具有积极作用,但将这种特征作为安全系统解保的输入,如在制导与修正弹药等具备获取空间域特征能力的弹药上采用空间域特征解保方式,有着更低的经济成本和复杂度。
2 基于空间域的识别方法与实现
本节以二维弹道修正引信为例,介绍一种对空间域特征的利用方法和一种对弹药时空对应性的判断方法。
2.1 总体设计
无论是何种制导和修正方式,在一定的发射条件下,都可以确定基准弹道和实际弹道,且前者可以由发射平台装定得来[18],后者则是引信通过传感器或GPS定位等方式获取的实时弹道位置信息。上述两种弹道信息就是空间域特征,引信可以通过对比实际弹道与基准弹道偏差实现制导与修正,这种方法也可以被运用到安全与解除隔离设计当中,总体流程如图3所示。

图3 基于空间域的引信安全系统原理Fig.3 Principle of fuze safety system based on spaital domain
引信待发域可在设计时就被确定基本信息,可在装定时根据目标实际空间位置进行调整,也可以根据弹道上目标出现或弹目交互信息进行决策并控制安全状态转换。例如,根据弹药安全半径确定解除保险最小安全距离,根据目标距离信息灵活决策是否进入待发状态或进行自毁时间参数调整等。
首先,发射平台装定预定条件(如修正弹药展开鸭舵和气动阻力片的时机)和基准弹道信息等先验信息。计时单元每隔δ使空间域特征记录弹药实际位置信息,其中采样间隔δ与弹载计算机计算弹道时的迭代时间步长应是一致的。时空对应判断模块主要做两个工作:一是对比实际弹道与基准弹道给出识别结果,二是通过对时间t信息进行判断并给出识别结果。其中,时空对应判断模块应是基于空间域的安全控制的重点。
2.2 时空对应判断模块
对于部分弹药而言,在调整弹道的过程中会对两种弹道直接做对比,但其更多关注的是位置特征,还有部分弹药更关注最终落点的方位差,两者都不能将时空对应性中“时”的特征记录下来。若要在安全系统中把握弹药时空对应关系,可以通过弹药三维空间坐标进行判断的同时进行时效性判断,并将两种判断结果进行与运算。在射击精准度的研究上,圆概率误差(CEP)概念的研究颇多,目前为验证某一弹药的修正能力,通常采用蒙特卡洛打靶法验证,使炮射方向为x,与x在水平面垂直的方向为横向z,高度为y,根据打靶结果得到的均方差σx,σy,可根据下式得到圆概率误差的计算结果:
(2)
式中:σ1=max{σx,σz},σ2=min{σx,σz}。在计算圆概率误差过程中,大多都是按照落点x、z相互独立且满足正态分布计算[19-20]。圆概率误差数值可以反映出弹道的一些基本特征,如同一种弹药在同一发射条件下,无控与有控下的圆概率误差存在很明显的差别,因此圆概率误差可以作为基于空间域特征的安全控制的参考,根据不同弹药打击目标的需求,设定一个安全系数S,并设定一个S倍于圆概率偏差的范围作为解保距离判断依据,如将GJB373B-2019中对引信安全距离前1/1 000安全失效率数值作为依据,根据正态分布表确定一个与基准弹道参考点相差3.03Rcep的距离范围作为解保依据。需要注意的是,安全系数S存在的意义是提高基于空间域的安全控制的可靠性,当系数过大时可靠性得到满足但在安全性控制上就失去了意义,系数过小时可以保证足够的安全性,但可靠性难以保证,因此安全系数S的选择需要根据情况而定。
根据上述内容,可以设计出两种基于空间域特征的安全控制方法:单距离特征和“距离+时序”方法,其中距离指的是实际弹道采样坐标点与基准弹道的距离,时序指的是到达一定条件后满足距离要求的一定时间关系,在本文中初步定为持续时间特征。
如图4(a)所示,基于单距离特征判断解保的方法可以类比于在时域中对环境激励幅值的判断。以过顶点后修正弹药为例分析,可以看出,不修正弹道可以被识别为异常弹道,正确修正弹道下可以正常解保,但因为弹道是一条三维的曲线,即使是两条完全不相似的曲线(如错误修正弹道与基准弹道),也可能出现最小距离满足解保距离要求的情况,故会在异常弹道情况下给出解保判决,这也是引言中所提到的在新型弹药中单靠距离这一标量作为解保条件不足以满足引信全寿命周期安全性要求的原因。
图4(b)所示的改进后的“距离+时序”识别方法与时域中“阈值+持续时间”的方法是类似的,视觉上像在一段基准弹道上确定了一个“通道”,只有实际弹道满足了距离条件并达到了一定时间后才能判定为正确弹道并给出解保判决,下述内容将用“通道”来简化表述“距离+时序”。

图4 两种基于空间域特征的引信安全控制过程Fig.4 Two fuze safety control processes based on spatial domain features
采用通道识别的好处是大幅度减小了在错误弹道下的误判概率,但是识别效果与选定的距离与通道长度(持续时间大小)直接挂钩,很显然在选取距离一定时,当通道长度过短,则识别过程越接近单距离特征判断方法,当通道长度足够长,对实际弹道的识别结果就越精确,但解保时间会相对延后,且会对引信弱硬件的数据存储和处理能力作出更高的要求。
2.2.1 空间位置判断方法
一般研究过程中的距离度量会选取欧氏距离,但根据前文的介绍,作为判断依据的圆概率偏差在大多数情况下在x和z方向上的标准差σ具有差异性,且还存在两方向偏差数据相关的情况,若采用欧氏距离,则会忽略两方向指标度量的差异性,因此,引入马氏距离,马氏距离的计算公式为
(3)
式中:m和n对应两个数据组,Σ-1代表多维随机变量的协方差矩阵的逆矩阵。在解算弹道过程中,m=(xz),n=(μxμz),Σ中各元素表达为
(4)
由上述两式可知,当式(4)中x,z不相关(Cov(x,z)=Cov(z,x)=0)且对角元素相等时,马氏距离就是欧氏距离;当对角元素不相等时且x、z不相关,马氏距离可以简化成为
(5)
式中:μx和μz分别为基准弹道采样点空间域特征数值。若取3.03Rcep作为距离边界,则最大容许马氏距离DMmax=3.03。上述式子表达了通道的边界确定过程,在实际测量中,通道截面应与基准弹道垂直,每一个截面上横向轴z长度不变,纵向轴x相当于绕着横向轴转过一定角度,设已测得实际与基准点间最小三向坐标偏差Δx、Δy、Δz,则计算得来的实际马氏距离DMr如下所示:
(6)
采用通道方法的判断依据,就是在规定时间t内,判断是否一直满足DMr 2.2.2 时效性判断方法 如前文所述,时效性也是衡量高性能安全控制的重要指标,故对时效性的判断过程不能省略。时效性判断分为两方面:总识别时间和延时的判断。 对总识别时间的判断,就是从识别动作开始后允许的最大识别时间tmax。在定采样频率下,设已采到第i个数据,则应满足iδ 在对延时的判断上,关注的是自识别动作开始的某一时间t,与第i个实际采样点中距离最接近的基准弹道曲线上的理论离散点,其相较于在此时间弹药本身应该在基准曲线中所处的位置点超前或落后的采样点个数Δi,根据采样间隔求出延时时间Δt=Δiδ,依据延时信息完成对时间对应性的判断,总体实现过程如图5所示。 图5 时效性判断方法设计Fig.5 Timeliness judgment method design 以某二维修正弹的弹道为例,将正常修正的实际弹道作为输入,验证通道识别方法的可行性与快速性,再以其他情况下弹道作为输入验证其安全性。 在不同发射条件和环境下,误差导致的实际弹道情况各不相同,但可以肯定的是,无论实际弹道如何变化或采用何种制导与修正方式,这种有控弹药弹道始终是以贴近基准曲线或目标为目的,因此取文献[7]的数据进行研究,可以进行管道识别方法在弹道识别方面的共性问题的仿真验证。文献中数据来源于一种炮射卫星制导二维修正弹,仿真初速v0=900 m/s,初始射角θ0=35°,射程约25 km,根据文献中的数据绘制出3种弹道:基准弹道、修正弹道和预测弹道,如图6所示。 图6 3种弹道示意图Fig.6 Diagram of three trajectories 其中,修正弹道的起始点取(15 000 m,6 000 m,55 m),落点取(24 900 m,0 m,5 m),预测弹道为不修正时模拟无控弹的弹道,落点约为(24 600 m,0 m,90 m),起点取(15 000 m,6 400 m,0 m)。仿真中选择50 ms的采样间隔,实际应用中要根据实际需求选取采样间隔。距离匹配窗口长度取11,即L=5。上述文献中圆概率误差数据σx=20.681,σz=4.859,则判断依据为实际坐标代入式(6)计算实际马氏距离并要求结果小于3.03即可。设判断10个采样点满足管道识别需求,即需要t=500 ms内实际弹道均处在管道内,时延设置Δtmax=1 s。根据上列设置,加载管道识别方法,识别结果如图7所示,约在实际弹道x=22 300 m,z=24.679 m处解除保险,每一次计算距离、匹配和判断的过程耗时49.5 μs,因此即使选择采样间隔更小,也具有足够好的实时性。基准和修正弹道采样点中间的虚线连线代表了在此采样点发生了时延,其中,加号“+”标记代表了在该采样点的时间尺度上实际位置超过了本应该在的位置,反之则用圆圈“o”标记,代表了位置上的落后,仿真过程中产生的的具体时延量值以及总体量值表示如图8所示。 图7 管道识别方法结果Fig.7 Result of pipeline recognition method 图8的左侧纵轴是发生时延时采样点的位移个数,右侧纵轴代表了整个识别过程中弹道在各采样点时存在的总体延时。此次仿真过程在约50~100采样点处有最大的时延:位置超前3个单位,时间上发生了150 ms的超前。后直至识别结束时,由于发生了两次位置滞后,最终时空对应性数值结果为+50 ms,符合设定的条件范围,证明管道识别方法具有足够的快速性,且能很好地监控弹道的时空对应性并输出解保命令。 图8 时效性量值判断Fig.8 Timeliness quantity judgement 根据制导率的原理,可以通过对弹道坐标施加加速度产生的位移影响的方式来构建其他弹道模型,为验证通道方法的准确性和安全性,表1展示了多次改变参数后得到的识别结果。从表中可以得知,序号1,2表示通道方法可以有效识别正常弹道信息;3,4表明该种识别方法存在一定的误差容忍范围;1,3,5表明了采用马氏距离的识别方法可以识别出两个方向偏差的差异性;6,7,8表明该种识别方法在异常弹道情况下会因多种判别逻辑的存在而保证对异常弹道情况的准确剔除。经过验证表明,通道识别方法可以满足引信安全系统的快速性需求,参数设置合理时能够保证足够的安全性。 表1 不同参数下识别结果Table 1 Recognition results under different parameters 本文提出了一种基于空间域特征的引信安全控制方法,也称通道识别方法,该方法能够快速准确地识别出弹药飞行过程中的位置信息与基准弹道曲线的空间位置差异,同时具备对时效性的把握,利用空间与特征实现引信的安全控制。该方法利用马氏距离来度量空间位置差距,建立距离匹配窗口的方式来确定两弹道间最接近的采样点,并基于此过程记录下识别时间与时间对应性(时延)信息作为时效性依据之一,用马氏距离数值作为距离解保依据并判断是否小于最大容许距离差作为位置判断依据,再根据满足要求的采样点个数推算出满足距离条件的时间作为时效性判断依据之二,上述3种判断依据在逻辑上进行与运算构成了通道识别方法。经过仿真验证可知,本文的识别方法拥有足够的快速性与安全性,能够识别出多方向距离的差异性,对修正弹道有一定的误差容忍范围,对异常弹道能够通过逻辑判别准确筛出,证明了基于空间域特征的安全系统解保方法的可行性,为引信安全系统高性能安全控制提供了一种新的设计思路,并为解保策略的设计提供参考。

3 仿真验证
3.1 正常修正弹道仿真


3.2 其他弹道仿真

4 结束语
