视觉自动化监测技术在铁路变形监测中的应用
2023-10-14杨军杰张立伟
杨军杰 魏 来 张立伟
(中国铁路设计集团有限公司,天津 300251)
引言
近年来,邻近既有铁路施工的建设项目越来越多,如邻近铁路的新建铁路、公路、石油管道下穿运营铁路以及铁路沿线新建住宅、市政工程等。 这些工程施工往往会影响铁路路基、桥涵、车站等的稳定[1],给铁路运营安全带来一定的风险。 因此,对邻近营业线的铁路结构物进行变形监测,是确保铁路行车安全的重要手段。
相关部门对营业线铁路监测精度和频次给出了明确要求:第三方变形监测须采用自动化实时监测技术,监测频次原则上不少于1 次/2 h,发生沉降数据超预警值后应加密监测,至少2 次/h。 高速铁路路基、桥梁墩台顶横向、纵向水平位移、竖向位移有砟轨道不大于3 mm,无砟轨道不大于2 mm[2]。
利用全站仪进行人工测量的方法无法满足营业线铁路变形监测的频次和精度要求。 为了克服传统变形测量手段的缺点,以近景摄影测量学为基础的非接触测量方法在安全监测领域开始受到关注。 近景摄影测量是一种涵盖摄影测量学、计算机视觉、光学测量、数字图像处理分析等学科交叉融合形成的新兴交叉学科,能够对各种运动、变化过程参数进行测量,具有精度高、自动化、非接触、动态测量、实时测量、易于实施等特点[3-4]。 近年来,近景摄影测量技术在基坑监测、桥梁变形监测中得到了广泛应用[5-9],并取得了一定的成果。 孟丽媛提出了一种利用相关系数对传统相机检校进行改进的方法,将所得结论用于合肥轨道交通二号线天柱路站基坑变形监测中,证明了近景摄影测量技术用到基坑变形监测中的可行性[10];张家炜使用工业非量测相机,在Visual Studio 2019 开发平台中设计并运行模板匹配算法和特征点匹配算法,将近景摄影测量技术与计算机视觉算法结合,开发出非接触式自动化基坑变形监测系统,可以自动化、高精度、大面积采集基坑变形数据并计算分析基坑变形情况[11]。
为解决营业线铁路变形监测高频次、高精度、实时预警的要求,研究开发了一套“视觉多点铁路营业线自动化变形监测系统”,通过优化原理算法、模块化集成、远程控制、镜头滤波改进、基于云平台的数据管理系统开发等研究,以期实现远程自动化实时监测预警和高精度监测。
1 视觉自动化监测系统架构
视觉多点自动化监测系统由监测方案设计模块、硬件集成模块、数据处理模块和预警发布模块组成,其中监测系统硬件部分由视频多点分段采集相机、校正基准点、靶点、控制器和电源组成,软件部分以图像处理技术为核心,实现误差修正和像素测量。 视觉多点自动化监测系统整体架构见图1。
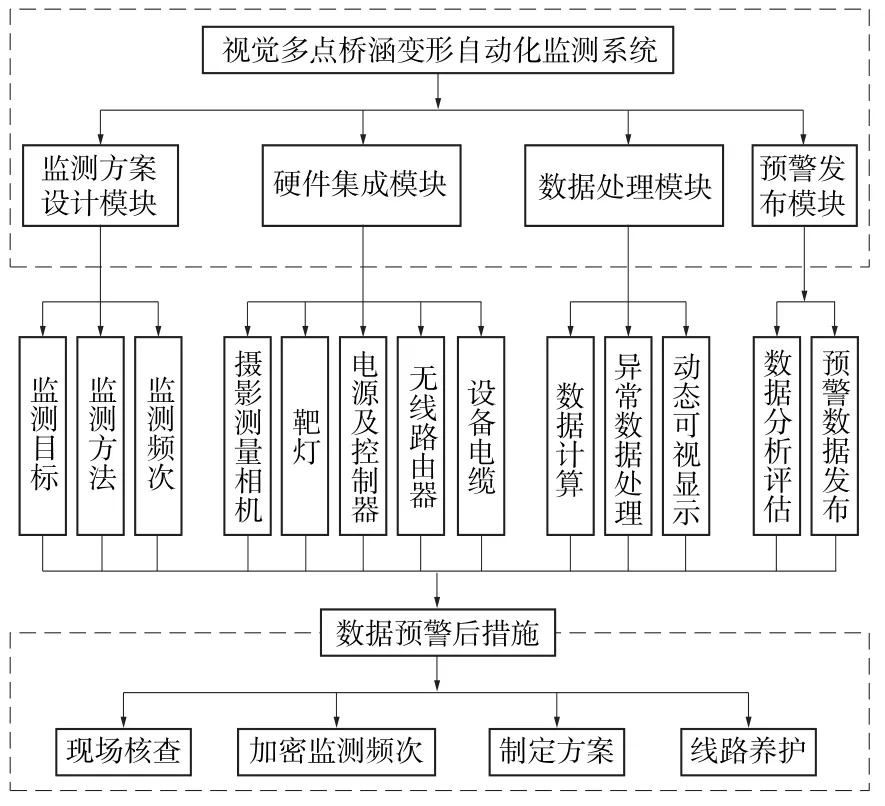
图1 视觉多点变形自动化监测系统整体架构
2 视觉多点变形监测原理和算法
2.1 视觉多点变形监测原理
视觉监测设备的基本原理:在被监测物测试点上安装1 个能够发射红外线的靶灯,通过光学系统把标识点成像在CCD 的接收面上,当路基产生形变时,测试靶灯也跟着发生形变,通过测出靶上标识点在CCD接收面上图像位置的变化值,结合被测物体与其在图像成像点之间的变换关系,便可以得到形变值。 利用高精度亚像素定位算法,使得视觉多点可分段式监测设备的形变检测分辨率突破了其CCD 器件像元的宽度大小的限制,具备极高形变监测精度[12-15]。
高清镜头CCD 可以对靶标上的多个特殊像素点进行智能识别和实时位置追踪,实现对靶标x、y轴向的二维位移自动化监测。 该设备具有动态响应好、自动化程度高、测量误差小等优点。
在获得基准数据以及后续测量数据后,删除由列车经过时扰动引起的异常数据可修正;采用低通滤波进行噪声滤除;采用基准点数据复原由仪器可能出现的姿态变化引入的误差;最终通过基于高精度亚像素定位算法计算出监测期间目标构筑物变形。
2.2 高精度亚像素算法
以初始采集的图像为参考图像,在参考图像中取以图像目标点(x0,y0)为中心的矩形区作为参考图像子区;变形后的图像为目标图像,假设参考图像子区中的各点(x,y)与变形后的目标图像子区中各点(x′,y′)的函数关系为
式中,u,v分别为参考图像子区中心在x,y方向的位移;(Δx,Δy)为点(x,y)到参考图像子区中心(x0,y0)的距离;ux,uy,vx,vy分别为目标图像子区的位移梯度。 变形前后各参数关系见图2。

图2 变形前后各参数关系
预定义相关函数为Cf,g(p),其中,p=(u,ux,uy,v,vx,vy)T,令相关函数Cf,g(p)的梯度为0,从而计算出待求的变形参数矢量p,进而计算出u和v的值。
设图像子区大小为(2M+1)×(2M+1),其中M为局部位移场中各数据点的局部坐标,则相关函数为
式中,f(x,y)为参考图像子区的灰度函数;g(x′,y′)为目标图像子区的灰度函数;fm为参考图像子区的灰度平均值;gm为目标图像子区的灰度平均值。
对相关函数的一阶偏导数采用Newton-Raphson亚像素插值迭代法进行优化求解,以整像素位移搜索结果为迭代初值,求解变形前后图像子区灰度相似度最高时变形参数矢量p,此时相关函数有最小值,且其一阶偏导数为0。
由于数字图像记录的是离散的灰度信息,在利用相关函数进行搜索时,窗口的平移只能以整像素为单位,因此获得的位移只能是像素的整数倍。 但是实际上,位移值一般不会恰好为整像素,尤其当测量距离较远时,结果常常为几分之一甚至几百分之一像素。 由于变形初值估计只能获得粗解,为提高数字图像相关方法的测量精度,采用Newton-Raphson 方法进行亚像素位移测量,该方法不仅考虑参考图像子区中心位置的变化,而且考虑参考图像子区形状的变化(正应变、剪应变、转动及其组合),更符合实际的变形情况。
3 监测数据精度
3.1 理论精度
理论精度为测量环境条件在绝对完美的情况下计算出来的精度,即无外界光照条件影响,测量过程中相机未发生任何姿态变动,此时,相机测量的精度στ与镜头焦距f(100 mm)、待测目标到镜头的距离S、像元尺寸I(7.4 μm)、亚像素算法精度(0.01 像素)有关,整体关系为
代入各项参数,可得连续测量的理论精度(见表1)。

表1 连续测量理论精度
3.2 实际精度
受环境光照变化、姿态变化、人为干扰等诸多因素的干扰,测量误差具有统计随机性。 除了设备中硬件系统误差外,测量误差主要还包括环境光照变化引入的误差σal、相机姿态变化引入误差σpc、人为干扰引入的误差。
其中,σal为实际测量过程中,两次测量时环境光照强度、方向不同以及监测目标的变形造成目标和成像系统间距变化所引起的投影误差等,从而导致靶点在成像平面上的特征发生变化引入的误差。 采用在镜头端添加850 nm 的滤波片、在待测物体端采用红外靶灯的方法可以大幅度降低环境光照差异、镜头畸变带来的误差。σpc为实际测量过程中由于镜头姿态发生变化、两次测量中设备位置整体发生变化引入的测量误差,通过在现场布设位置不动的基准点可以降低此项误差影响。
通过被测点的中误差可以统计出实际测量的精度,以N组变形监测实验获得数据为例,精度计算公式为
式中,σf为变形监测实际沉降或形变测量精度;X为目标点实际形变的数据,xi为第i组测量的结果(i=1,2,…,N)。 通过大规模实际测量,得出点位复原实际测量精度(连续形变监测),点位复原实际精度见表2。

表2 点位复原实际精度
4 系统应用
4.1 工程概况
某新建铁路引入既有高铁车站,其中6 处桥涵需要接长,邻近营业线范围内施工内容主要包括新建桥涵的基坑开挖、钻孔灌注桩、承台、主体底板、桥身及顶板施工、附属工程等;既有铁路为运营高速铁路,每天通过动车组20 余对,施工过程中已造成了桥涵开裂变形,安全风险很大,而采用传统的人工监测方法不具备实时监测预警和作业时间空间要求,因此采用视觉自动化监测技术势在必行。
4.2 监测内容和方法
采用在施工侧既有桥涵顶部及两侧路基上交叉埋设视觉多点观测靶点,通过近景摄影测量的方法自动监测施工过程中6 座桥涵的水平位移和竖向不均匀沉降。 基于BIM+GIS 技术建立运营高铁重点地段监测变形系统[16-20],视觉自动化监测系统云平台见图3。监测结果与建设、设计、施工单位实时共享,用于指导涵洞接长、站房改造施工,优化设计和施工工序,保障新建铁路施工顺利进行。
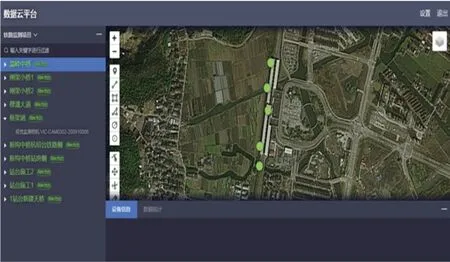
图3 视觉自动化监测系统云平台
4.3 监测方案
(1)涵洞监测靶点设置
按桥涵1 跨1 个点涵顶中间布点,两侧过渡段各加1 个点的原则布设,总计布设监测靶灯37 个,监测靶点结构示意见图4。
(2) 基准靶点设置
每个监测对象设置2 个基准靶点,6 座涵洞共设置14 个基准靶点;基准靶点设置在远离变形体的接触网柱上。
(3)采集仪设置
视觉多点分段采集仪(见图5)固定在远离桥涵一定距离的相对稳定的接触网柱上,高度为1.2~1.8 m。

图5 图像采集传输系统
4.4 监测数据分析
以K490+260 框架涵为例,该涵洞自2020 年9 月底开始施工,至12 月中旬主体结构施工基本完成,共设置5 个视觉自动化监测靶点(QH23、QH24、QH25、QH26、QH27),每天监测12 次,监测数据曲线见图6、图7。

图6 K490+260 框架涵累积水平位移曲线
从图6 可知,QH26 点(K490+275.44)变形最大,从2020 年11 月13 日至2021 年1 月3 日,变形一直处于增大状态,最大水平位移2.94 mm,监测期间其余监测点水平位移都在2 mm 以内,整体来看该桥涵水平位移变化不大,监测数据比较稳定。
由图7 可知,监测期间该框架涵所有监测点累积垂直位移都在2 mm 以内,曲线虽然呈波浪状,但是变化值很小,说明监测期间涵洞沉降变形较小。
为了检验视觉自动化监测方法的效果,另设置1 个棱镜监测点(里程K490+251.21),使用全站仪每天人工观测1 次,将2020 年12 月人工观测数据与视觉自动化监测数据进行对比,结果见图8。

图8 视觉自动化监测与人工监测对比
由图8 可知,两种监测方法结果基本一致,沉降变形基本在1 mm 以内。 仅12 月15 日至22 日差别较大,原因是该段时间主要天气为降雨和大雾,影响人工监测数据精度。 整体来看人工监测方法数据波动较大,而视觉自动化监测方法数据波动小、受外界干扰小、误差小。
5 结论
研究了基于近景摄影测量技术的视觉多点位移监测系统在营业线高速铁路结构物变形监测中的应用,表明视觉多点位移监测系统具有精度高、自动化、非接触、实时测量、干扰因素少等特点,具体结论如下。
(1)研究开发的视觉多点自动化监测系统,融合近景摄影测量技术、计算机视觉、BIM 技术、GIS 技术、远程控制、无线通信等多种先进技术,实现了营业线桥涵结构物变形远程自动化实时监测预警。
(2)与传统人工监测方法相比,该系统无需上线作业,不受天窗时间限制,可以实现实时监测,监测数据不易受干扰,数据稳定。
(3)采用850 nm 的滤波片可大幅度降低环境光照差异带来的误差,通过设置基准点可将设备位置变化引起的误差控制在1 mm 以内。
(4)靶灯成像受天气影响较大,尤其在降雨、大雾、霜露等天气条件下获得的靶灯图像模糊,数据解算和精度受影响较大。