水下地形测量中无人船测量系统的应用
2023-10-13于南洋董堰川孔淋淋
于南洋,董堰川,孔淋淋
(长江重庆航道工程局,重庆 400011)
在传统的水下地形测量过程中,主要在船体上固定测深仪及GNSS 接收机,待船体航行至指定方位后施测,测量过程受外界因素及人为因素的影响较大,耗时,危险系数高,且工作量大,测值精度无保证。测绘技术、自动化技术及人工智能的发展推动了水下测量过程的集成化,搭载单波束测深仪、多波束测深仪、姿态传感器等精密仪器的无人船测量系统在水下地形测量中开始得到应用,还能同时实现水上自动测绘,可安全、快速、精确地获取水下地形数据。
1 无人船测量系统概述
1.1 测量系统构成
无人船测量系统主要由船体、定位系统、控制系统、动力系统、测深系统等组成,能准确高效获取水下地形数据,在多种水域测量方面普遍适用。
(1)船体。出于便捷、灵活、安全等方面的考虑,无人船通常以高分子聚酯碳纤维为主要材质,抗风浪,防水防腐,自重轻,吃水浅,船体同时搭载多种监测设备及传感仪器。
(2)定位系统。一般借助GNSS 接收机展开定位,并借助软件对船体具体位置展开监测,以查询船体运行轨迹。
(3)控制系统。其中,通讯控制系统将无人船与岸上控制系统相连,保证测船工作状态及测值数据的实时传输;操作人员也可通过自动航行和人工遥控等方式操控测船。岸边控制系统则由通讯设备、软件及基准值组成,其中基站一般自行架设,并与CORS(Continuously Operating Reference Stations,即连续运行卫星定位服务参考站)系统相连;控制软件则包括数据采集处理、船体操控两个模块;通讯设备主要为无人船施测提供信号。
1.2 测量原理
无人船测量系统依据GNSS-RTK 动态差分定位原理展开导航定位,具体见图1。差分数据通过基准站由无人船接收机接收,同时借助与CORS 的连接,实现定位及导航。水深测量主要通过船体搭载的单波束测深仪根据回声定位原理展开[1]。任一测量时刻和位置下河底高程均可按下式计算:
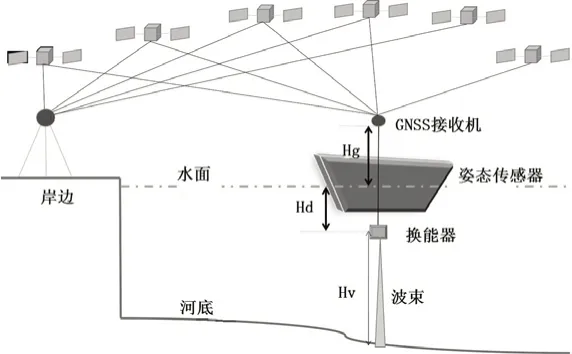
图1 无人船测量系统原理
式中:H 为任一测量时刻和位置下河底高程(m);HG 为测船GNSS 接收机的高程(m);Hg 为接收机与水面高度(m);Hd 为水面与换能器底部的距离(m);Hv 为测深仪所测求出的换能器与河底水深(m);为无人船的姿态改正(m);为无人船的声速改正(m)。
无人船实际航行施测的过程中,受外界环境因素影响较大,船体也会表现出横纵向摇摆,引发实际水深和测量结果的误差以及船位误差,且各种误差均随水深的增大而增大。应用姿态传感器进行水深校正[2],可提升水深测量结果的可靠性,姿态改正过程具体由系统软件进行,即每次施测时均通过声速剖面仪测量声速,反映出测区声速变动趋势规律,并使用系统软件进行声速改正。
2 工程河段概况
2023 年度长江上游航道整治建筑物维修项目主要位于长江上游宜宾至重庆河段,表面流速较大,本项目主要采取块石抛筑坝体、扭王字块护面等措施对原损毁的整治建筑进行修复,在施工过程必须全面掌握水下地形情况。此次测量水域长500m 左右,净宽25~50m,水深不超过15m,采用无人船测量系统施测并采集相关数据。
结合工程河段流速大、流态乱的实际情况及检测要求,决定采用华微3 号Pro 无人船展开水下地形测量。该型号无人船空间大,搭载多,全碳船身较为轻便;标配单波束测深仪,并集成搭载三维激光扫描仪以实时采集点云数据。该测船船体长1.05m、宽0.55m、高0.39m,吃水9cm;360°全向视频,并能实时回转;最大航行速度可达到6.0m/s;采用电台&网络&CORS 的基站通讯模式,可在2000m 范围内智能遥控;数据采用本地存储和远程存储两种模式;测深范围为0.15~300m,测深精度可达±1cm+0.1%h(h 为水深);其定位精度见表1。

表1 华微3 号pro 无人船水下地形测量定位精度
3 数据采集及处理
3.1 数据采集
该工程河段形状狭长,为便于施测,将河道分区布设为5 个测区,各测区测线向均与河道走向垂直,且各测区均设置2~3 条重合测线。分区内按《水运工程测量规范》(JTS 131-2012)及垂直于测线的方向布设检查线,长度为总测线长度的5%左右。此次待测河道共布设400 条测线和10 条检查线。
河道四周地形开阔,GNSS 信号基本不受遮挡和干扰,同时以河道附近CORS 站展开平面定位。工程河段水深较浅,水体水温变动小,故取河道声速值均值。使用无人船测量系统完成整个河道数据采集耗时短,测量效率高,工作时间大大节省。施测现场图见图2。

图2 无人船水下地形施测现场
3.2 数据处理
对采集到的测值进行声速、水位、姿态、吃水等改正[3]。该河道水深浅,流速较大,施测期间水文数据基本一致,故各项改正值通过1 个总值反应。总改正值采用校正法得出,即使用测深杆在不同水深区探测水深,并通过无人船在相同位置测量水深,两次测值的差值便是该深度下的总改正值。
无人船测量系统采用回声探测测深仪,声波发射后遇到水草、鱼群、悬浮物后会产生回波,接收到的测值可能存在异常,这种异常点大部分能通过数字滤波得到处理[4]。剩余的异常点只能借助人工筛查方式应对。具体而言,将经过数字滤波处理的数据导入EPS2018 绘图软件,构建三角格网并生成0.5m 高距的等高线,线图中所存在的异常密集区即为异常点所致;将所对应的高程点删除,采用同样方式二次创建格网和等高线;如此循环往复,直至图形内无任何等高线异常密集区,则完成异常点处理。见图3。
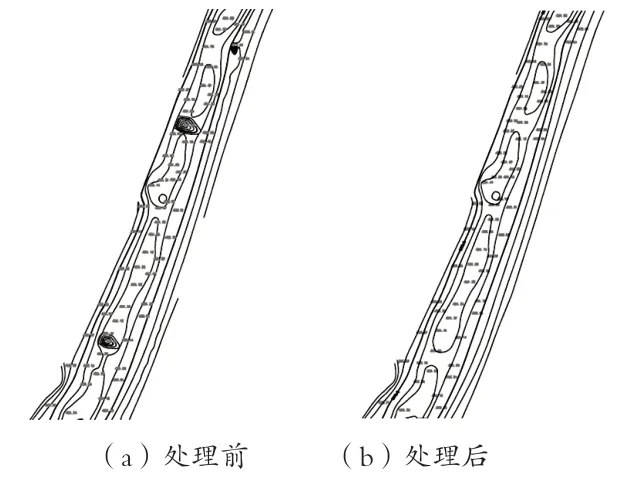
图3 测值异常点处理前后的比较
3.3 精度验证
为确保测值精度及测量结果的准确性,必须展开测深比对互差统计以及地形图精度的验证。
3.3.1 测深比对互差统计
结合《水运工程测量规范》(JTS 131-2012),当水深在20m 以下时,测量图上1mm 以内水深点的深度比对互差限差取0.4m,如果深度比对超限点数比参加比对的总点数多20%,则应重新施测。
以测深线和检查线的交点为圆心,以1mm 为半径在测图上确定采样范围,计算采样范围内的检查点和测深点的测深互差。此次测量共设置检查点216 个,其中3 个为超限点,占比达到1.3%,未超出20%的规范限值,故测量精度符合规范。
3.3.2 地形图精度验证
考虑到此次水下地形测量的目的,确保测量的精度,待水位下降后必须对漏出水面坝面及部分边坡进行验证此次验证采用全站仪极坐标法展开坝体地形图的抽检。
一般通过等高线表示水下地形起伏状况,故通过等高线高程误差以验证水下地形图高程精度。坝面为平面,边坡为1:2 的斜坡,起伏形状不大。结合实际情况,通过全站仪免棱镜模式采集到各河段检校点,并在地形图上推求检校点高程插值。以全站仪实测高程值为真值H1,以高程插值为测量值H2,误差统计情况见表2。

表2 误差统计情况
根据高程误差分布情况,其最小误差为0.43m,最大误差为1m,按照计算高程中误差,其中M为高程中误差,为高程较差,n 为检测点个数。将该河道水下地形相关参数值代入后可以 得出此次测量高程的中误差取±0.13m。因河道水下地形图绘制时采用1:500的比尺,并按照0.5m 的取值确定基本等高距,故根据规范所确定的水域高程中误差为0.33m。通过比较看出,通过无人船测量系统所测得的水下地形图高程精度符合规范。
4 结论
综上所述,无人船测量系统在河道水下地形测量中的应用可行高效,且该测量技术具有智能化、模块化、自动化优势,测量精度有保证。通过对测深互差的比较以及对地形图精度的验证,测量系统稳定性好,测深数据精度高,相关结果均符合规范。应用过程也表明,无人船测量系统基本搭载有电子罗经,能够实时记录测船位置、姿态、稳定性等基本参数,对于流速及风浪过大的施测环境,船体摇晃幅度较大时,必须展开高精度姿态校正。鉴于本文所测河道水流流速小,测船船体施测期间基本稳定,并未涉及船体姿态校正,故无人船测量系统姿态校正问题有待进一步分析探讨。