党参挖掘装置设计与试验
2023-10-13范耀华崔清亮张燕青陆佳新赵志宏
范耀华, 崔清亮, 张燕青, 李 光, 陆佳新, 赵志宏
(山西农业大学农业工程学院,山西 晋中 030801)
0 引言
党参是多年生草本植物,桔梗科党参属,生长于海拔1 560~3 100 m 的山地林边及灌木丛中[1]。由于党参具有较高的药用价值,种植成本低,环境适应能力强,近年来种植面积不断增加。
现阶段党参收获机按照机械化程度分半机械化和全机械化两类。半机械化党参收获机主要以手扶拖拉机为动力输出,挖掘工具为固定铲和振动铲,通常只能实现挖掘功能,后续还需人工挑拣。这种机具具有机械程度低、人工成本高、效率低下、收获时间长及劳动强度大等缺点[2-5]。全机械化党参收获机将挖掘装置、传送分离装置和收集装置集于一体,能实现从挖掘到参土分离再到收集的全部作业过程,工作效率高,作为大型农业机具适用于平原大地块作业。山西省长治市平顺县属于太行山脉,党参多种植在山地丘陵地带,目前使用铲式挖掘装置和人工挖掘两种方式。铲式挖掘装置在挖掘过程中能够达到深度要求,但参土分离效果较差、入土阻力较大、雍土现象严重,无法达到理想挖掘效率[6]。
针对上述问题,设计一种模拟人工挖掘党参过程的挖掘装置,为党参挖掘机的设计提供理论依据和技术支撑。
1 挖掘装置整体结构
1.1 结构组成
挖掘装置整体结构主要由悬挂、机架、挖掘机构和传动机构等组成,如图1 所示。

图1 党参挖掘装置结构Fig.1 Codonopsis pilosula excavation test device
采用模拟人工挖掘的方式对党参进行挖掘,挖掘工具由铲式改为叉式,并且使挖掘机具小型化,解决了山地丘陵地区的人工挖掘缺点。叉形结构入土阻力更小,破土能力强,提高了挖掘效率,本装置的伤参率远低于铲式挖掘装置的伤参率。
1.2 机构运动学分析
连杆机构在农业机械和工程机械中得到广泛应用,采用曲柄连杆机构,建立直角坐标系如图2 所示,各个杆形成闭合矢量方程,此方程可以用式(1)表示[7]。


图2 四杆机构坐标系Fig.2 Four-bar mechanism coordinate system
计算得出θ2和θ3的值。确定初始状态A、B、C、D的4 点坐标。杆BE长为l5,与x轴的夹角为θ5,向量BC与x轴的夹角为θ6,E点坐标(xe,ye),C点(l4cosθ4+l5cosθ3,l4sinθ4+l3sinθ3) , 则 向 量BE=(l5cosθ5,l5sinθ5) , 向 量BC=(l4cosθ4+l3cosθ3+l6cosθ6,l4sinθ4+l3sinθ3+l6sinθ6)得出E点的坐标式,即
党参挖掘深度为20~25 cm,达到挖深同时要求结构质量最小,确定各个杆长度比为l1∶l2∶l3∶l4=1.0∶3.5∶1.5∶3.5,各个杆长基本尺寸为l1=100 mm、l2=350 mm、l3=150 mm 和l4=350 mm。轨迹如图3 所示,点的轨迹深度约为250 m。
1.3 主要结构
采用曲柄连杆机构,结构如图4 所示,主要由挖掘叉、驱动杆、摇杆摆臂和轴承座等部件组成。其尺寸主要参照党参收获农艺确定,结构尺寸如表1 所示。当切削入土角>60°时,根据物体的力学模型,对土壤微粒A进行力学分析,简化土壤微粒受力模型如图5 所示。
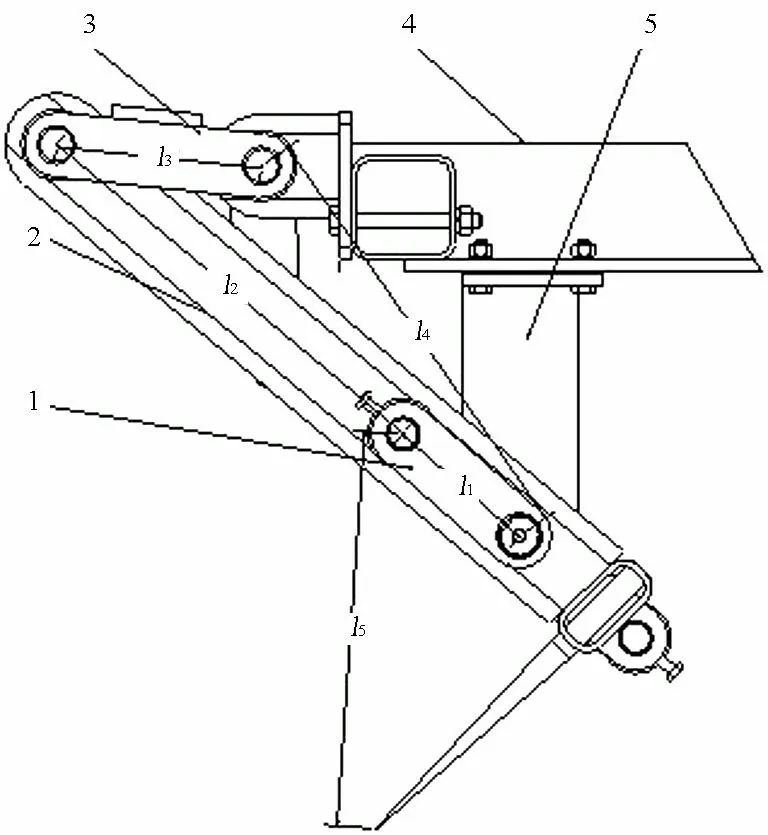
图4 曲柄连杆党参挖掘机构Fig.4 Codonopsis pilosula excavation device with crank and connecting rod

图5 土壤微粒剪切模型Fig.5 Soil particle shear model
在土壤微单元A上作用一水平力F,使A沿与水平面倾斜角为θ(<90°)的斜面上升,则必须满足
若已知F、G和μ即可由式(12)求出对应角的最大值。当μ取最小值时,θ取最大值。查阅可知,土壤和钢摩擦系数的最小值为0.35,则此时θ最大为70.7°。实际试验中,当入土角取60°时,土壤受到切削力变成挤压力,增大挖掘阻力,不利于挖掘[8]。确定最小入土角为70°,在ADAMS 中建立参数化四杆机构,保持机架、连杆和曲柄长度不变,改变摇杆长度,计算不同入土角时的摇杆长度。
入土角为70°、75°和80°时,入土深度在最低点为-410 mm,如图6 所示,杆长分别为130、155 和180 mm。确定主要杆长参数如表2 所示。

表2 杆长参数Tab.2 Rod length parameter

图6 摇杆长为130 和180 mm 时E 点轨迹Fig.6 Trajectory of point E when joystick length is 130 mm and 180 mm respectively
2 离散元模型建立
2.1 模型建立
成熟党参外形多呈圆柱型,取8 根成熟党参,分别测量其长度和外径,通过计算取平均值。为简化模型,将党参外形简化为圆柱模型。简化后的党参模型为圆柱型,直径为10 mm,长度为210 mm,如图7 所示。

图7 党参测量和离散模型Fig.7 Measurement and discrete models of Codonopsis pilosula
查阅相关文献,将土壤原型颗粒半径设为4 mm[9]。根据随机正态分布,生成颗粒半径范围为原型土壤颗粒的0.7~1.0 倍[10]。设置其颗粒之间的算法为 Hertz-Mindin with JKR 型,黏结能量设置为10 J。土壤模型如图8 所示。

图8 土壤模型Fig.8 Soil model
2.2 仿真模型参数确定
通过试验和查阅相关文献,确定材料参数和物料间接触模型参数,如表3 和表4 所示[11]。

表3 材料属性Tab.3 Material properties

表4 材料间接触参数Tab.4 Contact parameters between materials
3 仿真分析
3.1 耦合仿真模型建立
利用Proe5.0 建立挖掘仿真模型,然后将模型转换成“.step”格式,将模型分别导入到ADAMS 和EDEM,建立党参-土壤-挖掘机构简化模型,如图9 所示[12-17]。
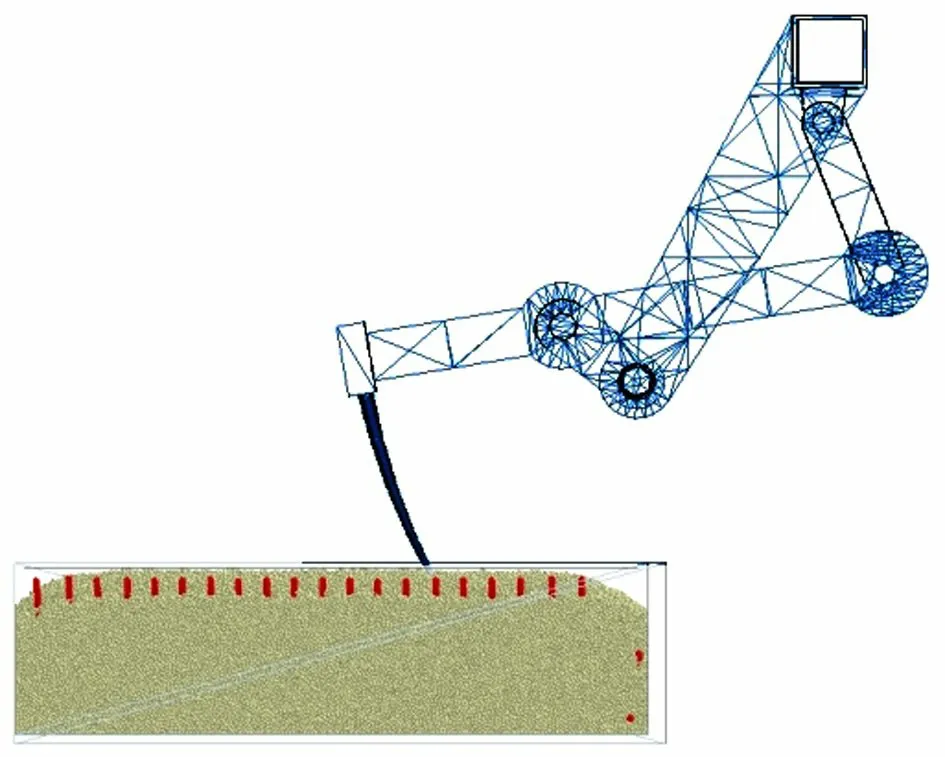
图9 土壤-党参-挖掘机构模型Fig.9 Model of soil- Codonopsis pilosula - excavation device
3.2 试验方法
采取单因素试验设计,土槽试验台车速为0.2 m/s,模型前进速度为0.2 m/s,挖掘过程如图10 所示。驱动杆转速分别为60、90、120 和150 r/min,入土角为70°、75°和80°,以挖掘叉的入土阻力为试验指标,一共组成12 组试验,如表5 所示。

表5 试验条件Tab.5 Experimental condition

图10 简化挖掘装置挖掘党参仿真全过程Fig.10 Whole process of digging Codonopsis pilosula with simplified excavation device
前处理模型生成后,打开ADAMS 耦合接口,进行挖掘工作模拟仿真。挖掘叉能够将党参挖掘出来,同时将土壤后抛,降低挖掘叉入土后的阻力,起到一定的松土作用,能够保证在挖掘过程中减少土块,其挖掘工作过程如图9 所示。
3.3 试验结果分析
为了减少计算量,本文研究挖掘叉从开始接触土壤到完全进入土壤时的阻力。挖掘叉开始接触土壤到完全进入土壤后,所受阻力逐渐增大,完全进入土壤后,阻力变化趋于平稳。
由表6 可知,入土角恒定时,转速逐渐增大,阻力逐渐增大,在转速150 r/min,入土角为70°、75°和80°时,阻力分别为402、367 和334 N,阻力达到最大值,所以较佳转速为60~90 r/min。

表6 转速不同时入土阻力Tab.6 Resistance to soil penetration at different rotational speeds
转速为60 r/min,入土角为70°、75°和80°时,入土阻力值分别为280、254 和232 N;转速为90 r/min,入土角为70°、75°和80°时,入土阻力分别为331、313 和274 N;转速为120 r/min,入土角为70°、75°和80°时,入土阻力分别为383、333 和312 N;转速为150 r/min,入土角为70°、75°和80°时,入土阻力分别为402、339 和272 N。阻力随角度的增大而减小。经过单因素试验分析,得出最佳入土角范围75°~80°,最佳转速范围60~90 r/min。
4 土槽试验与结果
4.1 试验条件
通过查阅文献资料得到长治市土壤在自然条件下含水率为16%[18-19]。对土壤进行测定,要求土壤的含水率数值接近16%,同时测量土壤的坚实度,如图11所示。
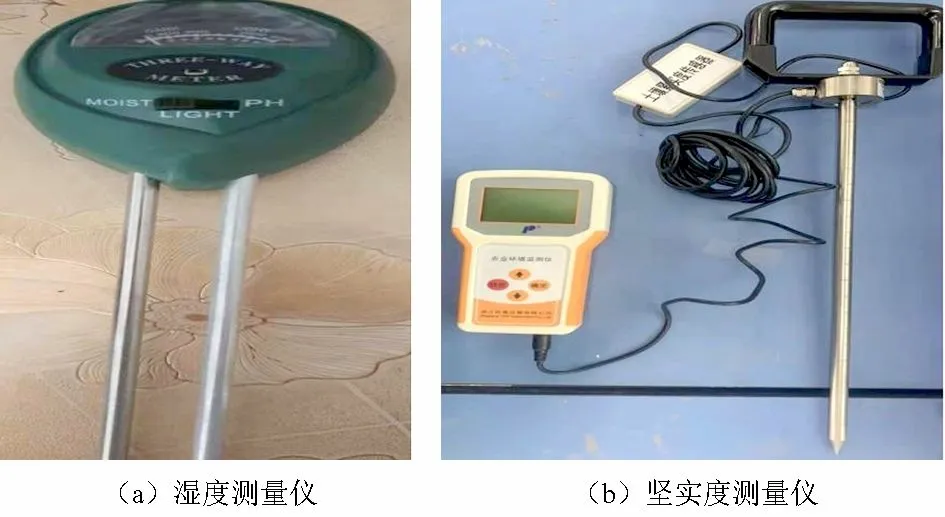
图11 湿度测量仪和坚实度测量仪Fig.11 Humidity measuring instrument and firmness measuring instrument
选取挖松率和损伤率为指标,以入土角和转速为试验因素,设计最优平衡完全随机试验进行验证。党参挖松率、损伤率按式(13)和式(14)计算。
式中W1——挖松率,%
M1——测区内明放、露出地面根茎和挖掘松动的根茎总质量, kg
M——测区内所有根茎质量,kg
W2——挖松率,%
M2——测区内机具作业导致从挖出的根茎中找到被挖断的、皮破损的党参质量,kg
在土槽内开挖2 个1.7 m×0.6 m×0.2 m 的种植坑。在坑内沿土槽试验车前进方向开45°左右的斜坡,将党参沿土槽试验车前进方向依次摆放在斜坡上,株距为30 mm,进行埋土、浇水、压实、晾晒和挖掘工序。挖掘过程如图12 所示。

图12 党参挖掘Fig.12 Codonopsis pilosula excavation
4.2 试验方案确定
车速为0.2 m/s 情况下,设计最优平衡完全随机试验,入土角75°~80°,驱动杆转速60~90 r/min。将转速和入土角设为两个因素,转速4 个水平,入土角2个水平,列出水平表7 和水平观测表8,运用SAS 软件进行分析。

表7 挖掘试验转速和入土角因素水平Tab.7 Factors of rotation speed and angle of penetration in excavation test
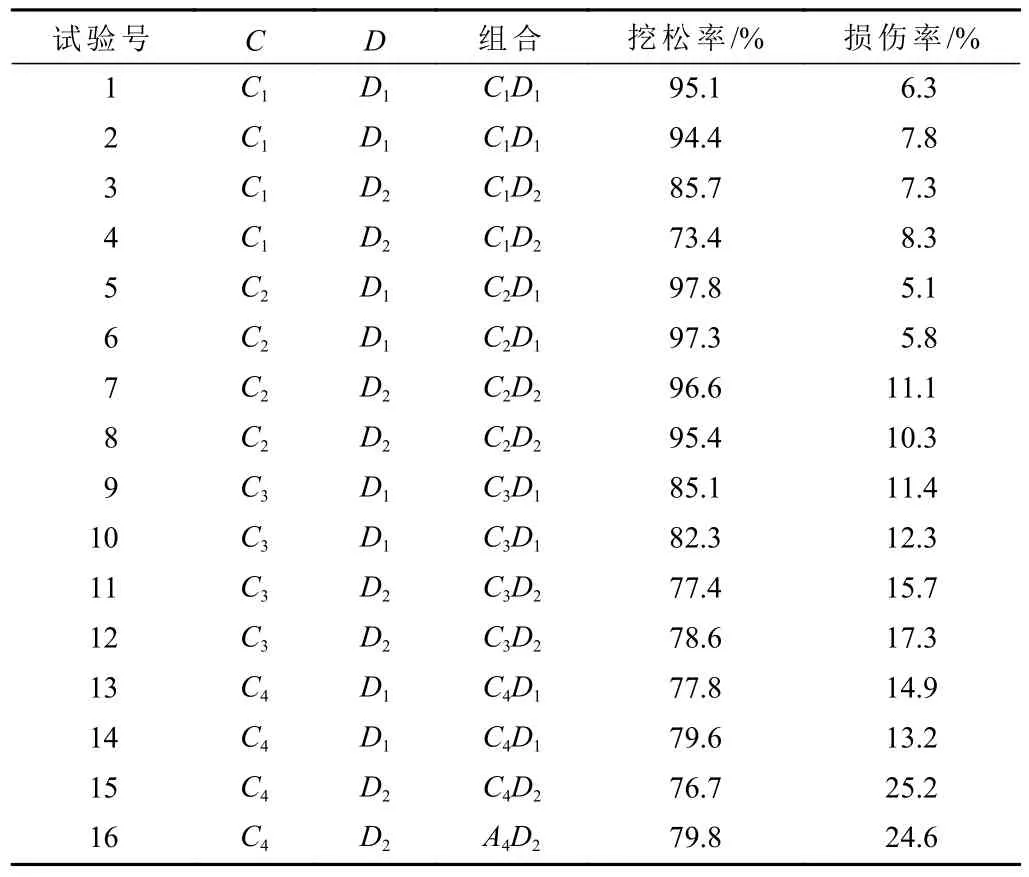
表8 SAS 试验数据观测样本Tab.8 SAS test data observation sample
4.3 试验分析
4.3.1 转速和入土角对挖掘试验的影响
由表9 可知,转速为70 r/min 时,挖松率最高,为97.1%;损伤率最低,为5.6%。转速60 r/min 时的损伤率低于转速80 和90 r/min。综上所述最佳的转速为70 r/min,次之转速为60 r/min。

表9 不同转速时挖松率和损伤率对比Tab.9 Comparison of loosing rate and damage rate at different speeds
由表10 可知,入土角为75°时,挖松率最高,为91.8%;损伤率较高,为8.5%。所以最佳入土角为80°。

表10 不同入土角时挖松率和损伤率对比Tab.10 Comparison of loosening rate and damage rate at different penetration angles
4.3.2 挖掘试验组合效应对试验的影响
由表11 可知,转速和入土角组合是70 r/min×75°时,党参的挖松率极显著地高于其他组合,党参的损伤率极显著地低于其他组合。当转速和入土角组合为60 r/min×75°时,损伤率也极显著地低于60 r/min×80°、80 r/min×75°、80 r/min×80°、90 r/min×75°和90 r/min×80°;而其挖松率显著高于70 r/min×75°。分析得出,最佳组合为70 r/min×75°,次之组合为60 r/min×75°和70 r/min×80° 。

表11 试验组合效应对挖松率均值多重性比较Tab.11 Multiplicity comparison of combined effect of excavation test on mean value of excavation rate
5 结束语
(1)党参挖掘装置采用曲柄连杆机构,装置结构设计简单,可减轻装置质量,实现山地丘陵党参挖掘机械作业。
(2)转速对挖松率和损伤率影响最高,入土角次之。转速和入土角最优组合为70 r/min×75°,次之组合为60 r/min×75°和70 r/min×80° 。
