智能履带变幅水肥一体喷洒机设计
2023-10-13刘志远褚幼晖单东日何青海
刘志远, 赵 敬, 褚幼晖, 单东日, 李 双, 何青海
(1.齐鲁工业大学(山东省科学院),山东 济南 250353; 2.山东省农业机械科学研究院,山东 济南 250100;3.山东斯马特农业科技有限公司,山东 济南 250000)
0 引言
随着科技的进步,人们对农业的认识也在不断地发生变化。从当前的形势来看,农业结合大数据和云计算技术的优越性越来越明显,智能农业也从概念迈入了实际应用阶段,极大地提高了农业生产质量与效率,进一步促进了农业现代化的发展[1-4]。2017 年,国务院印发《新一代人工智能发展规划》,明确了人工智能的发展趋势,包括农业智能感知与控制系统、农业智能监控系统、智能农业监控系统、智能农业监测系统和智能分析系统等。
澳大利亚在2007 年制定了一个100 亿澳元的全国节水项目,超过50%被用来开发灌溉设备和水肥一体化技术。印度的微灌溉在过去10 年中也迅速发展,是10 年前的4 倍。日本已有了完全自动化的管道灌水系统。美国则大量应用地下渗灌和微喷灌技术,并通过智能网络控制所喷洒的液体中肥料的比例,这种技术在超过70%的农田中推广使用,极大地节省了当地有限的水资源,也节约了照看农田的人力物力。
中国虽然地大物博,但是水资源境况却不容乐观,近年来,节水灌溉技术也逐渐得到了大众的关注,部分地区也开始大规模使用水肥一体化节水机械。汤攀等[5]对比例施肥泵吸肥活塞结构进行了优化与试验,试验结果显示,优化后的抽水活塞下端直径16.6 mm、泄流槽宽5.5 mm、泄流槽深度3.7 mm,工作压力差在0.05、0.10 和0.15 MPa 时,喷淋效果比原设计的喷施精度提高3.33、1.67 和0.29 个百分点。闵祥梅等[6]研制了一种新型水肥一体化喷灌设备,采用螺旋管道将水从四通管道中抽走,另一部分流入不锈钢管道,再从喷嘴中喷出;在支架的左侧,比例型肥料泵的底部与蛇皮管相连,而蛇皮管与肥料桶相连,由肥料管道进行喷洒。在河南省,小麦种植滴灌水肥一体化技术也开始大规模应用。
在智能化生产的今天,传感器技术得到了快速的发展,特别是在智能化的农业领域。简单来说,通过物联网利用温度、光照、CO2等传感器,对周围环境进行监测,再由各种仪器进行实时监测,计算机终端进行分析,对作物的生长进行预测,并由相应的设备进行自动控制[7]。现代农业的发展离不开物联网技术的支持。从目前的农业发展状况来看,物联网技术是未来农业发展的主要方式,而智能化农业也将逐步得到推广[8-9]。随着智能温控、节水灌溉、光线调节等技术的不断发展,为将传感器技术推广到农业机械化领域打下了坚实的基础。同时,也切实提高了智能化农业机械的操作效率、安全性和稳定性[10-12]。
目前市场上大范围农田喷洒机仍然存在短缺的问题,特别是南方梯田无法大范围应用固定喷灌技术。本研究根据现有智能喷洒技术,设计一种智能履带变幅水肥一体喷洒机,并对其中的移动装置和肥箱进行重点设计,底盘则采用履带式底盘,降低入地压强,增加灵敏性,以期能在前进中对田地中各处种苗进行肥料喷洒。
1 整机结构与工作原理
智能履带变幅水肥一体喷洒机结构如图1 所示,智能履带变幅水肥一体喷洒机主要由智能电机、梅花联轴器、支撑板、喷头、速度传感器、轴承及轴承支座、螺旋传递座、螺旋传动轴、负压式水肥箱、进肥管、液位传感器、水肥分隔板、履带车主体、固定箱和升降器等部件组成。负压式水肥箱通过固定箱用螺栓固定在智能履带车后部。变幅喷洒装置则通过下部的支撑板与升降器连接。为了增大喷洒机的抓地力、增强喷洒机应对泥泞地面的能力,采用履带前进的方式[13]。

图1 智能履带变幅水肥一体喷洒机结构Fig.1 Structure of intelligent track long-stroke integrated water and fertilizer sprinkler
2 关键结构设计
2.1 变幅移动装置
通过SolidWorks 和AutoCAD 建模,设计的变幅移动装置如图2 所示。

图2 变幅移动装置结构Fig.2 Long travel mobile device
电脑通过连接线与智能电机连接,将智能电机实况数据实时传递到电脑中,并可通过电脑直接控制智能电机转速。智能电机通过梅花联轴器和螺旋传动轴连接,传递智能电机扭矩;轴承及轴承支座Ⅰ、Ⅱ将螺旋传递座和螺旋传递轴固定在支撑板上,用来固定喷头行程方向;喷头通过螺旋传递座上预留的小孔将喷头固定。
2.2 肥箱系统及吸肥原理
肥箱系统结构如图3 所示。进肥管和负压式水肥箱连接;水肥箱利用水肥分隔板将水肥箱分成大小两个箱体;液位传感器固定在负压水肥箱侧面,用来测量负压式水肥箱内剩余量。进肥管深入负压式水肥箱中,并通过文丘里原理与水肥分隔板分割出的小肥箱连接,抽出水的同时压力差带动小肥箱里的肥料进入进肥管,以达到混合的目的[14-15]。

图3 肥箱系统结构Fig.3 Structure of fertilizer box system
3 控制系统设计
智能水肥灌溉履带车控制系统是为水肥一体化智能设备设计的高效控制系统。整个系统包括主页系统界面、监测系统界面、数据显示界面和实时参数界面等部分。
主页系统界面中可控制智能履带车的前进和转弯,显示速度、工作时间等各项数据。监测系统界面则是显示水肥溶液的各项数值,包括EC值、pH 值及履带车所处地点的GPS 信息等。数据显示界面详细展示水肥溶液中的各项数据,包括肥料比例,以及各肥口的流速、流量等信息,同时还可以通过界面控制肥料口的进出,以满足不同环境下对节水的需求。实时参数界面可以通过传感器实时显示各项环境数据,包括土壤温度、土壤湿度、空气温度、空气湿度、CO2值及光照强度,并在界面显示各数据的变化,同时,通过历史记录可显示并保存以往水肥机不同时刻的不同数值,以备综合分析使用。
当蓝牙链接控制器时,可以由手机端控制;选择就地控制时,由现场人机交互界面控制。设定相关参数后,点击开始运行按钮设备进入自动工作模式,传感器将采集信息进行回传处理,由监测系统界面和实时参数界面时刻显示各项信息,在历史记录中储存有以往水肥一体化设备施肥的各项数据。
3.1 控制界面
当设备启动时,自动进入主页系统控制界面,如图4 所示,主页系统界面包括履带车控制模块、履带车电量显示模块、蓝牙连接模块和履带车参数模块。履带车控制模块可控制履带车的前进后退和转弯,以及开关机,同时也可以通过模块里的寻车按钮寻找履带车位置。履带车电量显示模块通过其电量显示和电量旁边数字查看履带车电量剩余情况。蓝牙连接模块通过点击和电脑或者手机链接,实现在电脑和手机上控制履带车及查看参数,实现远程控制。履带车参数模块包括X方向行程、Y方向行程、速度、四轮转速差和工作时间,以及施肥现场的空气温度和空气湿度,主要来判断履带车所处位置和转弯速度。点击触摸屏上方监测按钮,进入监测系统界面,如图5 所示。界面包括施肥机监测模块和GPS 模块。施肥机监测模块用于监测肥料口实时流量,肥料混合液的EC 值、pH 值、肥液流量、累计流量、管道压力、光照强度,以及注水阀流速、注肥机流速和肥箱液位高度,用来监测肥料口情况数据及肥料箱数据。GPS模块则是通过链接GPS 卫星得到履带车经纬度和海拔气压数据,以此来调节后续的出口压力和肥箱内肥料种类。
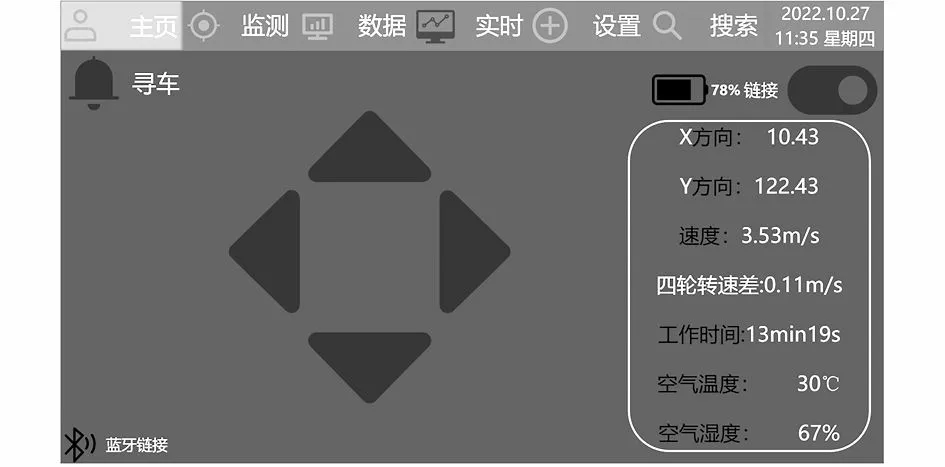
图4 主页系统控制界面Fig.4 Interface of main page system control

图5 监测系统界面Fig.5 Interface of monitoring system
点击触摸屏上方的数据按钮,进入数据显示界面,如图6 所示。界面主要包括肥料比例模块和肥口数据监测模块。肥料比例模块包括肥料设置、肥料比例显示和进出料口开关,通过肥料设置,设置各肥料口进料比例和出肥口出肥比例,并通过环形表将进料和出料的比例实时显示出来,以此来避免进料和出料错误。下方的出料口开关和进料口开关则可以控制进料口和出料口的开闭,实现远程控制进料和出料。肥料口数据监测模块监测A、B、C 和D 肥料口的开闭,以及流速、持续时间和总流量,实现单独控制,更好地去节水节肥,最大限度地利用肥箱中的各种肥料,控制各口开闭去适应多变的施肥环境。

图6 数据显示界面Fig.6 Interface of data display
点击触摸屏上方的实时按钮,进入实时参数界面,如图7 所示。主要通过各项传感器监测土壤温湿度、空气温湿度、CO2浓度和光照强度等信息,图7 中曲线显示了近几个小时各项环境参数的变化趋势;历史记录则可以查看过去几天、各个时间的各项参数,为优化节水施肥策略提供指引。
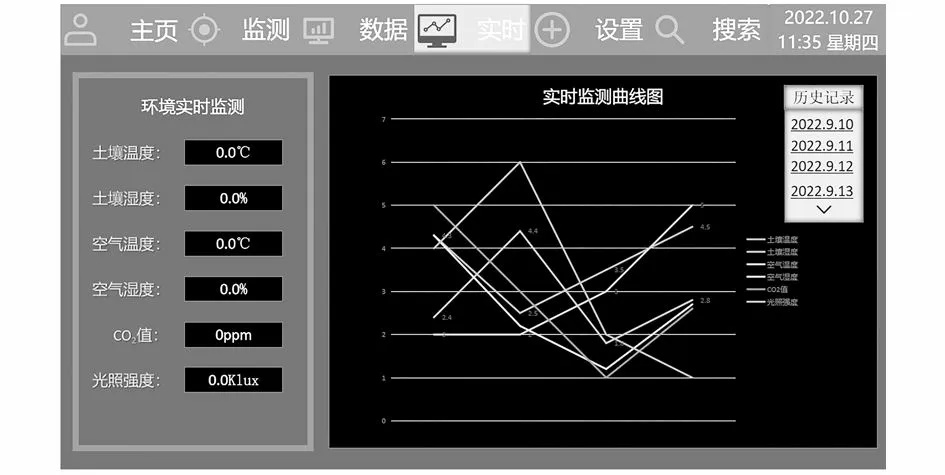
图7 实时参数界面Fig.7 Interface of real-time parameter
3.2 软件设计
为实现精准施肥,减少系统响应时间和施肥滞后造成的误差,设计了智能履带变幅水肥一体喷洒机控制系统,将路线采集部分、图像采集部分和施肥控制部分集成,再结合GPS 的现场信息,由计算机计算出精确的施肥量和施肥位置,从而控制履带车进行精准施肥作业,并在施肥期间不断采集信息,随时调整各项施肥数据,从而完成一片区域的精确施肥控制[16-20]。智能履带变幅水肥一体喷洒机控制系统整体流程如图8 所示。
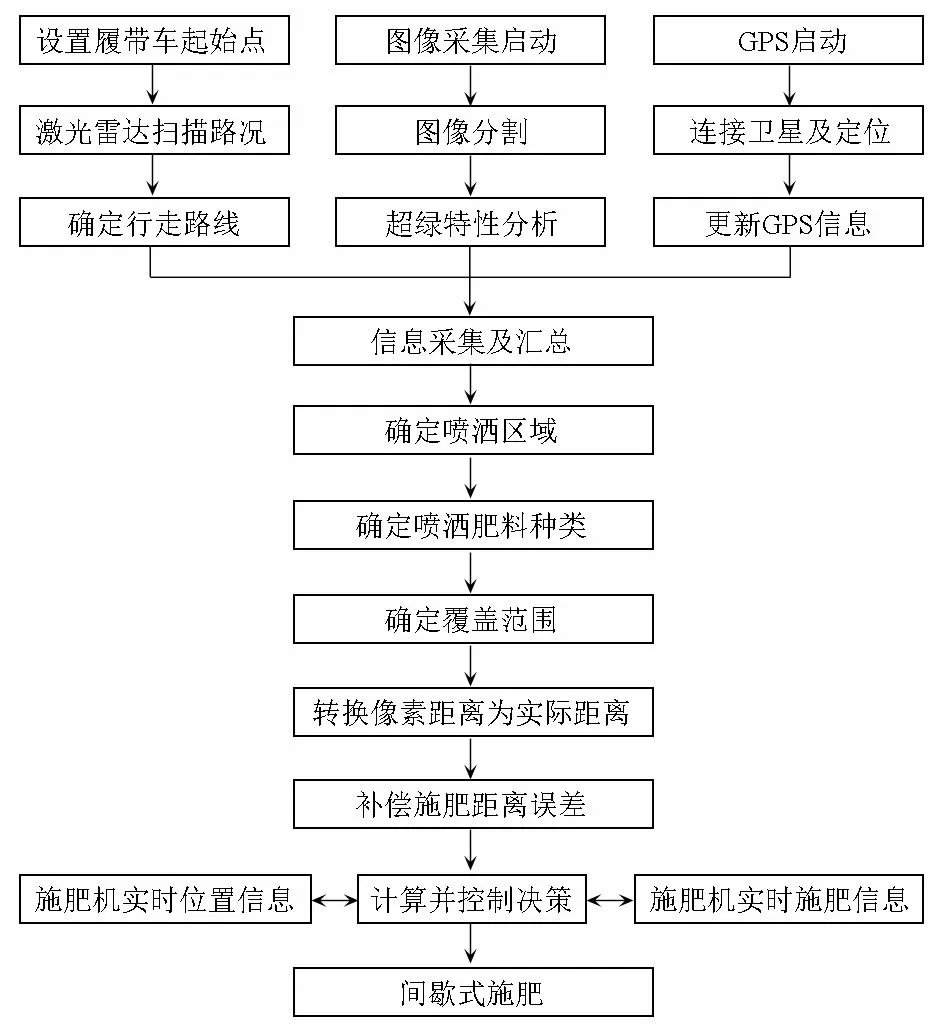
图8 智能履带变幅水肥一体喷洒机控制系统流程Fig.8 Flow chart of control system of intelligent track long-stroke integrated water and fertilizer sprinkler
4 结束语
(1)针对现在农业智能化、机械化程度低,管理模式粗放,水肥浪费严重等问题,设计了智能履带变幅水肥一体喷洒机,重点设计了移动装置和肥箱机构。喷洒机构通过一段长螺旋传动轴连接各结构,利用固定在轴上的螺旋传递座在水平方向带动喷头移动,并且联合履带车上的升降杆完成竖直施肥运动;肥箱则通过文丘里原理进行水肥的吸取。
(2)智能履带变幅水肥一体喷洒机的运动、升降杆与螺旋传递座的调节,以及肥料与喷头的控制均可通过无线网络进行实时监控和控制,控制面板通过便捷式计算机控制施肥过程及施肥量,根据施肥现场环境不断进行调整,有效地提高了田间的施肥效率,节约了肥料资源。
