一种基于径向基函数神经网络的电子侦察无人机资源调度方法
2023-10-12黄黔川刘盼盼
黄黔川,刘盼盼
(电子信息控制重点实验室,四川 成都 610036)
0 引言
电子侦察是电子战支援的一种手段,即采用各种电子装置侦察敌方电子系统并测定其各种参数。对电磁信号进行搜索、截获、测量、识别和定位,以获取雷达、通信等设备发射电磁信号的电子信号特征参数及位置信息。电子侦察无人机和地基、舰载等侦察手段相比具有独特的优势,它的作用距离远、覆盖地域大、机动能力强,并且危险性小,不会造成人员伤亡,有一架无人机就能对辐射源定位[1]。然而,与地基、船载、大型机载设备相比,由于无人机平台的负荷限制,通常无人机载无源侦察设备的天线、接收机和处理器规模受到制约,导致其电子侦察的瞬时空-频覆盖能力较弱[2]。面对复杂电磁环境、特别是电子目标闪烁开机时,操作员对电子侦察无人机的资源调度工作量陡增,工作效率低下。通过优化电子侦察无人机传感器资源调度算法,能够有效提升电子侦察无人机的侦察效率。
目前国内对电子侦察无人机传感器资源调度算法的研究较少。文献[2]提出了一种无人机群协同无源定位资源优化调度方法,该方法主要是利用观察窗口进行侦察资源的协同优化调度。文献[3]提出了一种无人机侦察任务系统即时排序的算法,算法根据任务有效性及任务分类进行侦察任务的排序,但该算法粒度较粗,仅细化到任务级,未在传感器级上进行调度控制。文献[4]提出了一种基于效能函数的传感器管理最优决策模型,该模型以量测前后获得的目标信息增量为性能指标,分析了基于最大预测误差协方差的传感器资源分配算法的最优性能。但基于效能函数的方法无法解决线性加权求和方法在目标参数量化和优先级分配中的问题。
电子侦察无人机中传感器的调度问题,其本质是对被侦察目标优先级的排序问题,本文通过梳理电子侦察中的目标优先级分配要素,构建一个多变量多层的网络模型,再利用径向基函数神经网络技术,来解决电子侦察无人机资源调度中复杂电磁环境下目标优先级分配问题,使得传感器资源分配策略更加高效自主。
1 目标优先级分配要素
根据电子侦察的特点,电子侦察目标优先级分配的信息有:威胁等级、重要等级、时敏等级、定位标记、定位误差、截获次数、重返侦察时间。将其分别用x1,x2,…,x7表示,则有:
x1:表示目标威胁等级,取值[1,9]。9为最高,1为最低;威胁等级越高,目标分配优先级越高。
x2:表示目标重要等级,取值[1,3]。3表示人工指定重点目标,2表示自动判定重点目标,1表示非重点目标;重要等级越高,目标分配优先级越高。
x3:表示目标时敏等级,取值[1,3]。3表示地面制导类雷达时敏等级,2表示地面警戒雷达时敏等级,1表示地面气象、导航等雷达时敏等级;时敏等级越高,目标分配优先级越高。
x4:表示目标定位标记,取值0或1。0表示目标未定位,1表示目标未定位;未定位目标优先级高于已定位目标。
x5:表示目标定位误差,取值[1,99],单位km。定位目标中定位误差越小,目标分配优先级越低。
x6:表示截获次数,取值[1,9 999]。截获次数越大,目标分配优先级越低。
指定海域中通航的船舶交通风险,该风险显示为此航线上通行的船舶发生碰撞或搁浅的概率,并量化为某个指定的时间段内发生该事故数。
x7:表示重返侦察时间,取值[1,999],单位s。时间间隔越大,目标分配优先级越高。
x1,x2,…,x7中部分值通常呈现非线性特征,其值的确定需要依靠操作人员的控制经验和专家知识。在实际应用时需模糊量化将各个参数归一化到[0,1]范围内。归一化的数据更能反映目标信息之间的关系以及目标和目标优先级之间的关系。
2 径向基函数神经网络
2.1 RBF神经网络的构造
径向基函数(RBF)方法是用于多变量函数插值的一种传统方法。1988年,Broomhead和Lowe将RBF应用于神经网络设计之中,构造了RBF神经网络[5]。它具备网络简单、学习速度快和逼近性能良好等优点,广泛应用于函数逼近、模式分类等。
RBF神经网络是一种三层前馈神经网络,输入层由若干感知单元组成,不对信号做任何处理,主要作用是传递信号到隐层;隐层采用径向基函数作为激活函数,通常包含较多的神经元个数,完成从输入空间到隐层空间的非线性变换;输出层对隐层输出进行线性计算,完成对输入信号的响应。图1为RBF神经网络的结构图[6]。

图1 RBF神经网络结构
图1 中,X=[x1,x2,…,xi]T表示RBF神经网络的输入变量;H=[h1,h2,…,hj]T表示RBF神经网络隐层中的径向基向量;W=[w1,w2,…,wn]T表示RBF神经网络输出权值向量。
在RBF神经网络中,高斯函数、多二次函数、逆多二次函数都可以用作径向基函数。其中,多二次函数呈现单调递增特征,高斯函数、逆多二次函数随着中心距离的增大呈现单调递减的特征。本文选取高斯函数作为径向基函数。高斯函数这种呈单调递减性的径向基函数具有良好的局部特性,它会对输入信号在局部范围产生响应,即变量x靠近径向基函数的中心时,函数将取得最大的值。
采用高斯函数作为径向基函数时,径向基神经网络的激活函数hj表示为:
式中,Cj=[cj1,cj2,…,cjn]T,j=1,2,…,n为隐层第j个节点的中心向量。δj表示网络节点j的基宽参数。
由此可得,RBF神经网络输出为:
同时,定义RBF网络逼近性能度量:
2.2 RBF神经网络学习
根据RBF神经网络的网络结构可知,输入层与隐层直接连接,而隐层与输出层通过权值矩阵Wn相连接,而RBF网络要学习的主要参数有3个,基函数的中心cj、方差δj及隐层到输出层的权值Wn。
如图2所示,RBF神经网络训练步骤为:
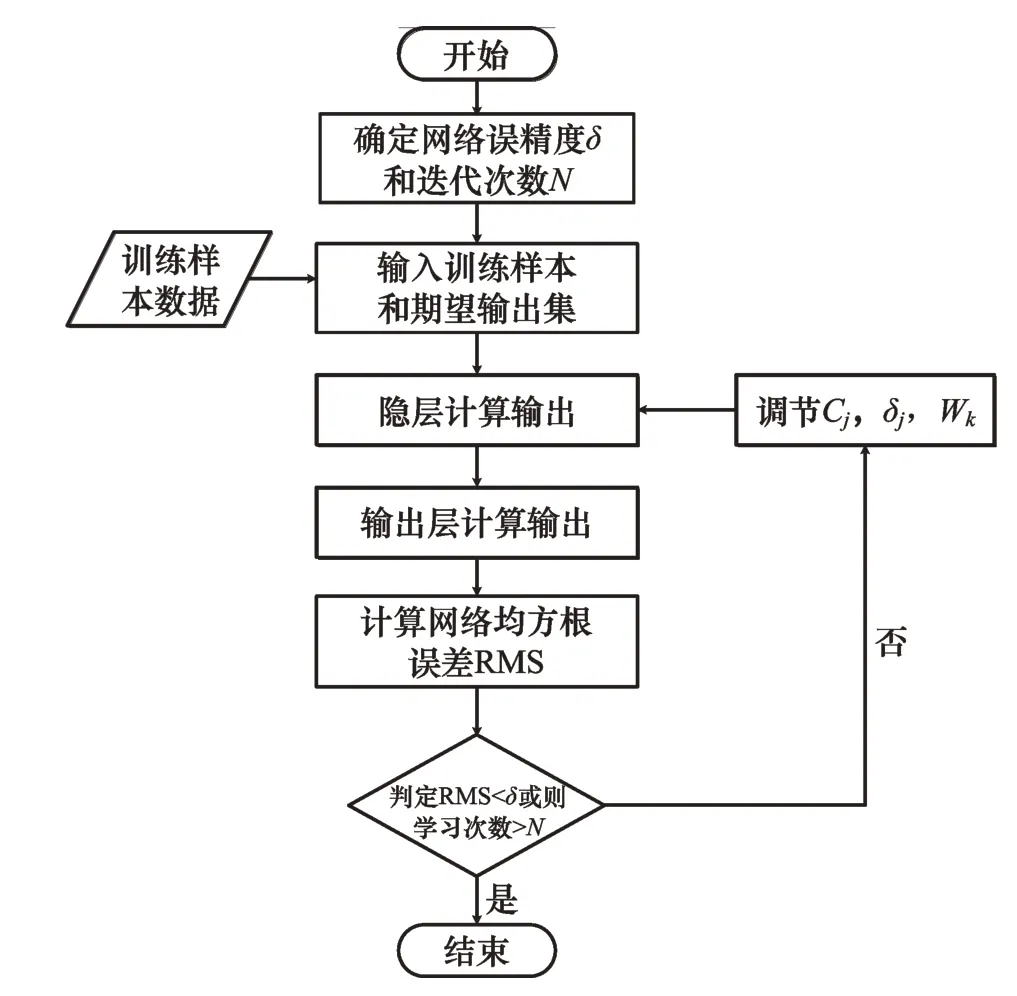
图2 RBF神经网络学习训练流程
1)进行神经网络的参数初始化,确定网络误差精度δ及迭代次数N;
2)利用训练样本数据(含输入训练样本和期望输出集)计算输出结果,并计算与期望输出的均方根误差;
3)若误差满足终止条件,则终止训练,否则,采用梯度下降法继续调整cj、δj和Wn,再进行循环计算并判断是否满足终止条件。
3 仿真分析
3.1 RBF神经网络训练
理论上,只要网络隐含层节点数足够多,RBF神经网络就可以以任意精度逼近任何非线性函数[7]。为了验证基于RBF神经网络的电子侦察无人机资源调度的有效性及正确性,基于目标优先级分配信息及专家经验生成了450组数据,涵盖了威胁等级、重要等级、时敏等级、定位标记、定位误差、截获次数、重返侦察时间等信息的集合。选取其中400组数据作为训练数据,剩余50组作为验证数据。在RBF神经网络中,设定误差精度δ=0.001及迭代最大次数N=200。多次训练表明,隐层节点数等于34时,训练时间及误差精度满足要求。RBF神经网络训练预测值与真实值对比如图3所示。
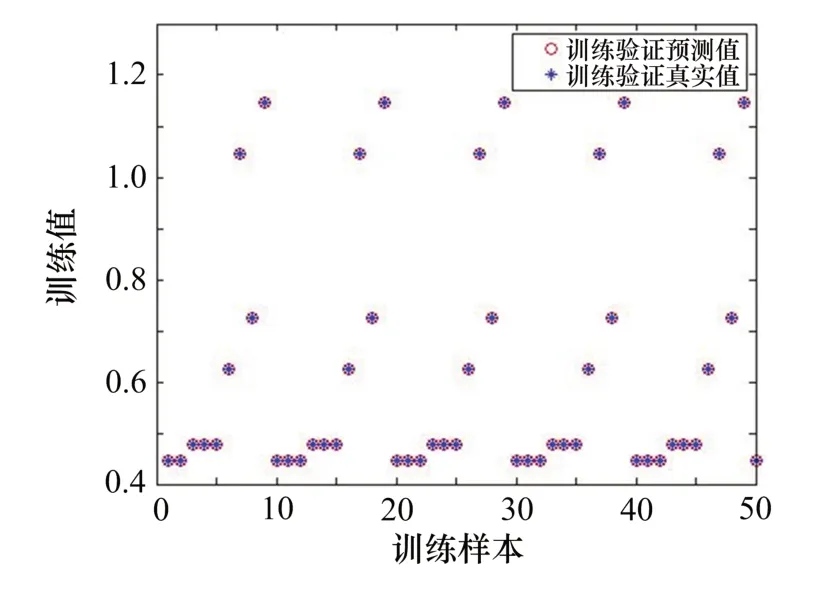
图3 RBF神经网络训练预测与真实值对比图
3.2 场景仿真验证
仿真试验中包含1架电子侦察无人机及10部地面雷达。其中雷达1—6全程开机,雷达7—10闪烁开机(每间隔2 min开机20 s)。表1为10部雷达的具体工作参数。

表1 仿真验证雷达工作参数表
设定电子侦察无人机从位置(108°8'48″E,34°24'39″N)起飞,速度450 km/h,航向180°,侦察范围机身法线方向左右45°范围内,飞行时间100 min。
使用RBF神经网络根据实时侦察信息进行侦察资源优先级计算,并根据计算结果将优先级系数最低的3个侦察资源分配给优先级系数最高的3个侦察资源。图4为使用RBF神经网络策略调度前后无人机资源分配对比情况。从对比情况来看,使用RBF神经网络策略调度能够在侦察过程中根据实时侦察情况来调度资源,将持续开机目标频段资源分配给了闪烁开机目标。

图4 RBF神经网络与常规轮训策略资源调度对比图
图5为使用RBF神经网络策略调度前后侦察雷达截获次数情况。从对比情况来看,使用RBF神经网络策略调度避免了侦察资源浪费在重复的目标上,更倾向于截获次数全局最优的结果。
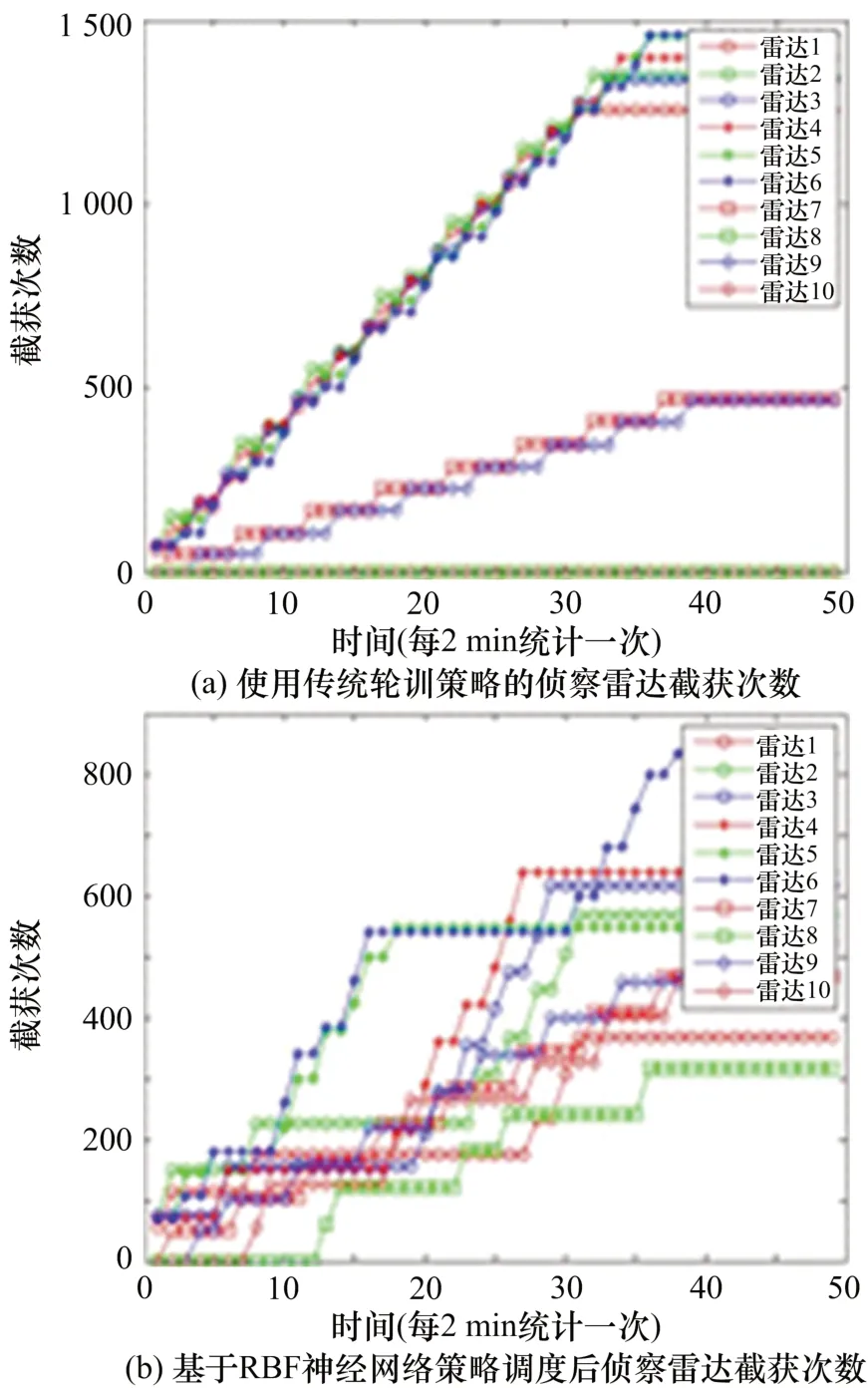
图5 RBF神经网络与常规轮训策略截获次数对比图
图6为使用RBF神经网络策略调度前后侦察雷达定位误差情况。从对比情况来看,传统的资源调度方法对闪烁开机的雷达8、雷达10未能进行有效定位;使用RBF神经网络策略调度虽然在部分目标定位精度收敛速度上有所损失,但是成功地将闪烁开机的雷达8、雷达10进行了有效定位。
4 结束语
电子侦察无人机侦察资源调度是一个复杂的问题,由于影响传感器资源调度的因素较多,在复杂电磁环境下,传统的传感器资源调度方法难以快速有效地进行传感器资源分配。本文将传感器资源分配问题转换成目标侦察优先级排序问题,并利用RBF神经网络可以逼近非线性函数的能力,解决了目标优先级分配过程中的非线性问题。仿真结果表明,在面对复杂环境时,本文方法能有效地提升传感器调度资源侦察效率。