基于XGBoost的SRD功率变换器故障定位研究
2023-10-11唐静
唐 静
(成都工业学院 自动化与电气工程学院,成都 611730)
开关磁阻电机(Switched Reluctance Motor,SRM)具有结构简单、起动转矩大、起动电流小、调速性能好等优点,同时其驱动系统的可靠性好,容错性能高,使得开关磁阻电机在恶劣环境下的应用有绝对的市场优势。但是,在实际应用中,开关磁阻电机调速系统(Switched Reluctance Driver,SRD)的功率变换器开关管发生短路或开路故障的概率较大[1]。开关管一旦故障,SRM输入的三相电流将不再平衡,导致输出转矩也不平衡,从而其合成转矩具有较大的转矩脉动,严重时会损坏电机。因此,及时发现系统功率变换器开关管故障并准确定位故障成为了当下研究热点之一。
针对SRD功率变换器故障的研究中,文献[2-5]使用三相不对称功率变换器,主要以SRM的三相电流变化为故障判断依据,其考虑的特征量较少。文献[6]提出了一种N+2式功率变换器,根据不同的功率变换器结构,比较几种不同的断路故障下中点电流变化情况,总结不同故障对应电流的特征。文献[7]提出一种基于直流母线电流和续流总线电流数字化信号的变换器故障在线诊断方案,通过比较不同故障下直流母线电流和续流总线电流的不同来判别故障类型及定位故障相,该方法相对于三相电流检测方案,节省了传感器数目,可实现故障定位。以上文献主要依靠传统的故障检测方法,对电机反馈的各个量进行分解分析得出结果,过程繁复且计算复杂。而很少有将人工智能与SRD功率变换器故障诊断相结合的研究。目前,随着人工智能技术的不断发展和进步,被广泛应用到各个领域,本文针对SRD的功率变换器开关管易发生短路或开路故障的问题,以人工智能为基础,综合考虑开关磁阻电机在故障状态下发生变化的各个电量和物理量,构建一种基于机器学习的功率变换器故障定位系统。该方法不需要精确的数学模型,只需要以人工智能技术为支持,以知识为基础,将历史的故障信息与人类专家知识进行结合,从而实现故障的智能诊断。本文以三相12/8极开关磁阻电机为控制对象,电机额定转速为1 000 r/min,额定转矩为100 N·m。主电路开关管采用绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT),使用三相不对称功率变换器,以机器学习为基础,综合考虑了SRM的电流、转矩、转速等特征量,构建一种基于极限梯度提升(Extreme Gradient Boosting,XGBoost)算法的功率变换器故障定位系统,通过在线仿真验证该方法的可行性。
1 故障类型分析
以三相12/8极开关磁阻电机为控制对象,使用三相不对称功率变换器,其功率变换器结构如图1所示。在开关磁阻电机的控制方法中,可以以上桥臂作为斩波管,下桥臂作为位置管;也可以以上下两管同时作为斩波管和位置管[2-3,9]。本文采用上下两管同时作为斩波管和位置管,即每相上下两管同时导通、同时关断的方法对电机进行控制。
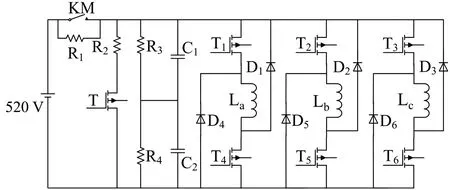
图1 三相不对称功率变换器
IGBT的故障类型主要有开路故障和短路故障2种,由于本文采用每相上下两管同时导通、同时关断的方法对电机进行控制,因此,任意一相上管或下管发生开路故障产生的现象相同,任意一相上管或下管发生短路故障产生的现象相同。因此在分析开路故障和短路故障时,均以C相下桥臂T6故障为例进行分析。
1.1 开路故障
C相开路故障如图2所示。当T6发生开路故障时,由于C相下桥臂断开,Lc始终得不到励磁电流,而A、B两相正常励磁,在其导通角范围内,La、Lb均正常得电,使得三相电流不再对称,同时由于C相得不到电流,在C相导通的角度范围内,也不再产生电磁力,导致三相输出转矩不再对称,此时电机为了保持足够的电磁转矩以驱动负载,A、B两相将产生比正常时更大的电磁转矩,从而导致A、B两相电流比正常运行时更大,电磁转矩极其不平衡,电机将产生较大的转矩脉动,同时电机转速也会有一定的波动。
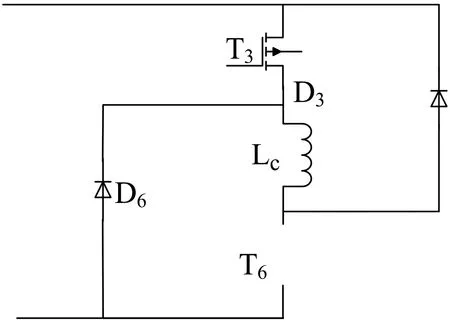
图2 C相开路故障时IGBT状态
在额定转速1 000 r/min、20 N·m负载转矩下,0.2 s发生C相单管开路故障,可得电机故障时的电流、转矩、转速波形,如图3~5所示。
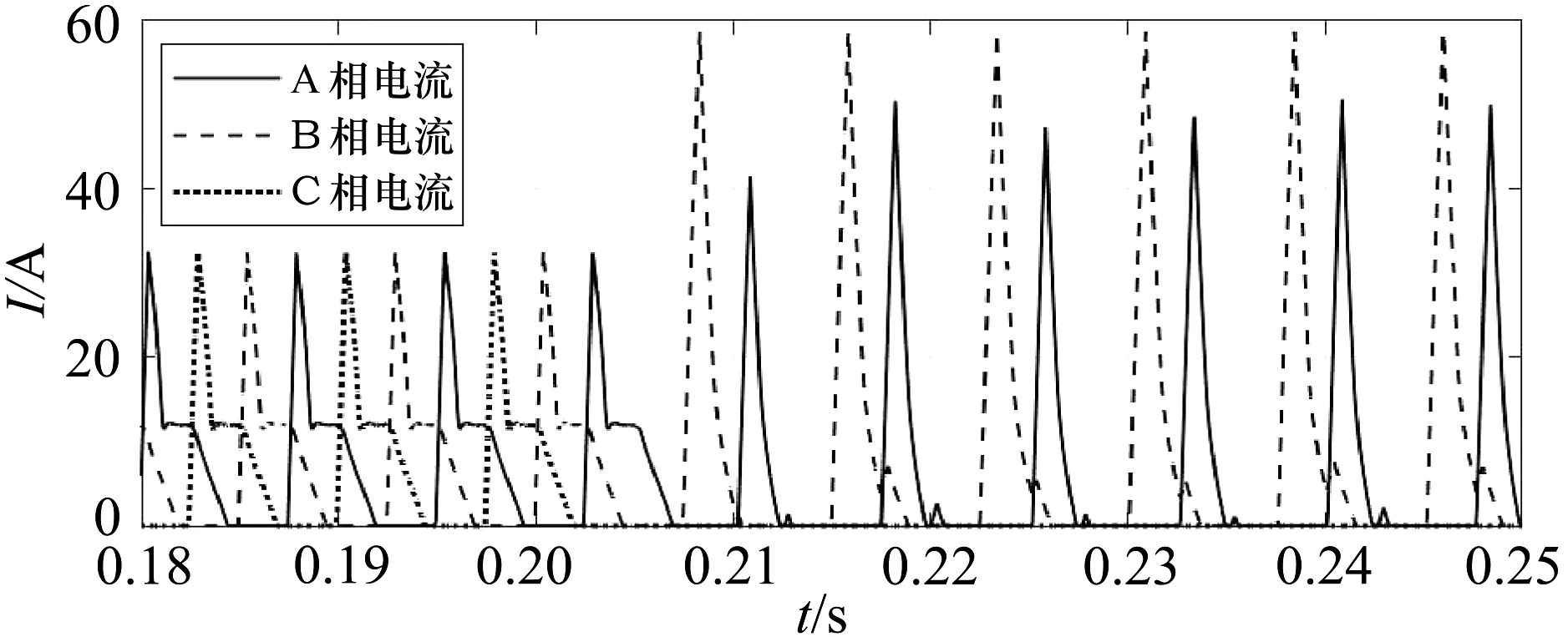
图3 C相开路故障时SRM三相电流
从图3可以看出,A、B两相电流峰值增大,C相电流持续为零。从图4可以看出,A、B两项转矩峰值增大,C相转矩持续为零。从图5可以看出,电机转速出现波动,但平均转速基本保持不变。
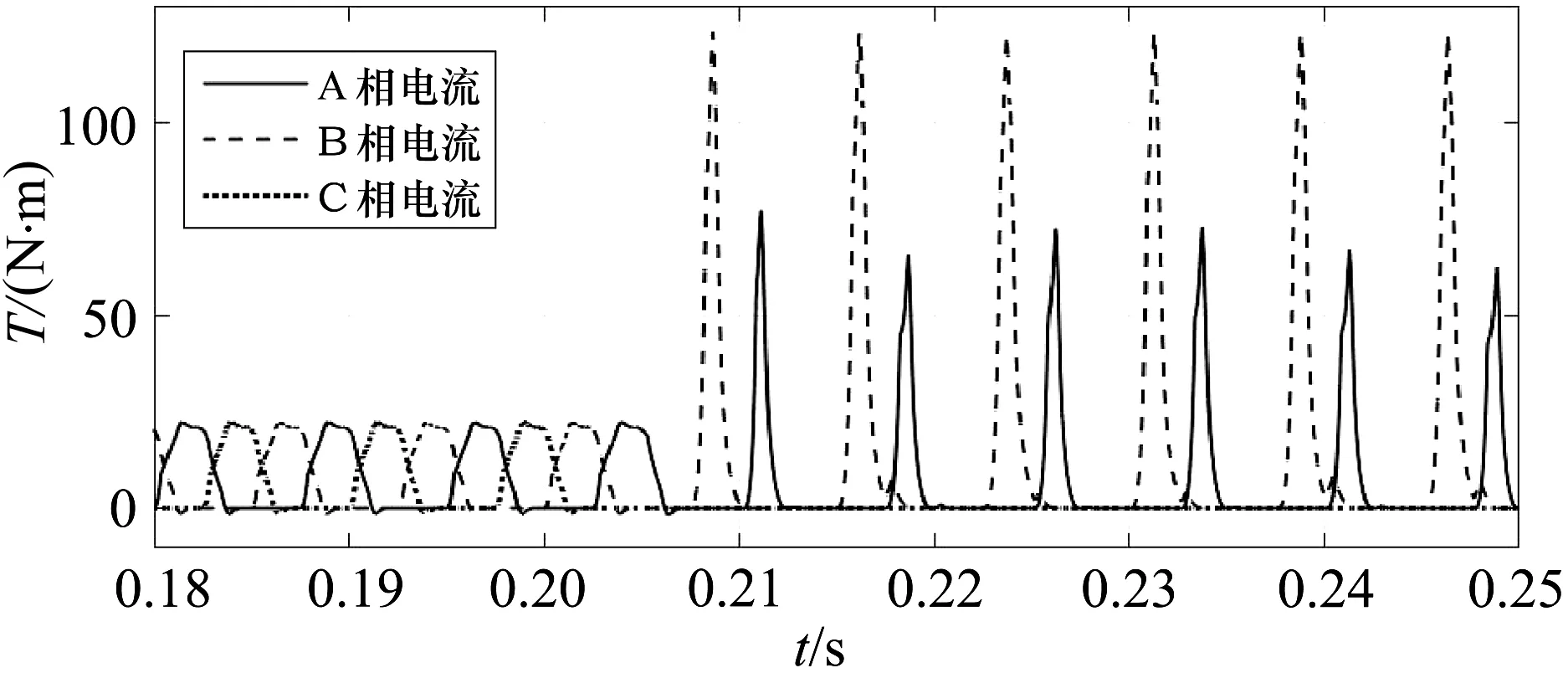
图4 C相开路故障时SRM三相转矩
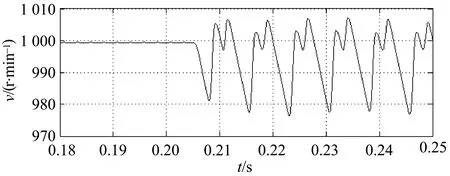
图5 C相开路故障时SRM转速
1.2 短路故障
当T6发生短路故障时,C相应有2种状态。第1种状态:当T3导通时,C相正常导通,系统正常运行,如图6(a)所示;第2种状态:当T3关断时,C相本应该关断,但Lc经D6续流,电流持续不会下降,此时C相电感正处于下降阶段,连续的电流会产生一定的制动转矩,阻碍电机正常运行,如图6(b)所示。
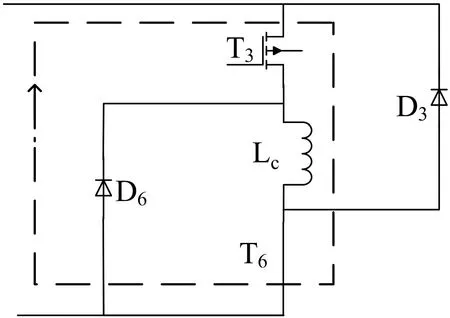
(a)IGBT流过电流状态1
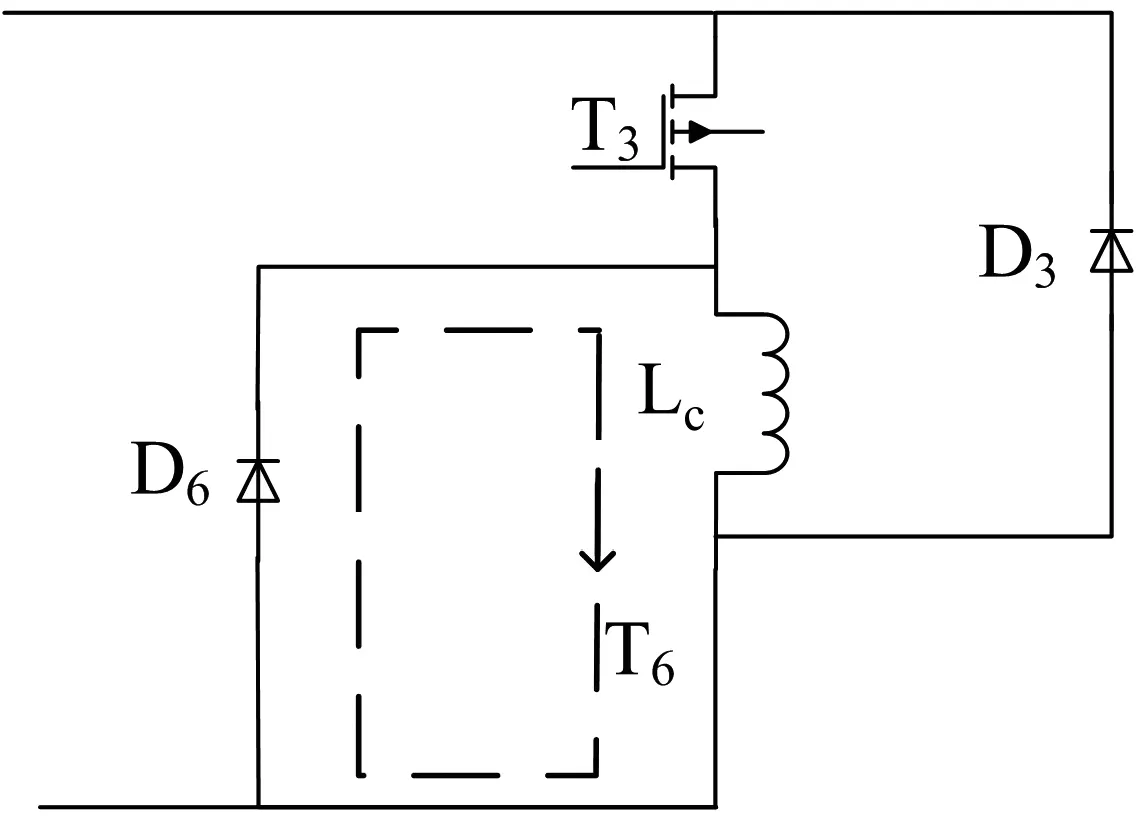
(b)IGBT流过电流状态2图6 C相短路故障时IGBT状态
在额定转速1 000 r/min、20 N·m负载转矩下,0.2 s时发生C相单管短路故障,可得电机故障时的电流、转矩、转速波形,如图7~9所示。
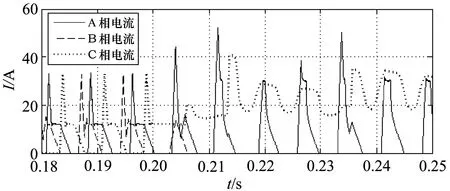
图7 C相短路故障时SRM三相电流
从图7可以看出,A相电流峰值增加,B相电流趋于零,C相电流持续在较大值上下波动。从图8可以看出,A相转矩峰值增加,B相转矩趋于零,C相转矩峰值增加且在负方向出现制动转矩。从图9可以看出,电机转速出现较大波动,但平均转速基本保持在1 000 r/min左右。
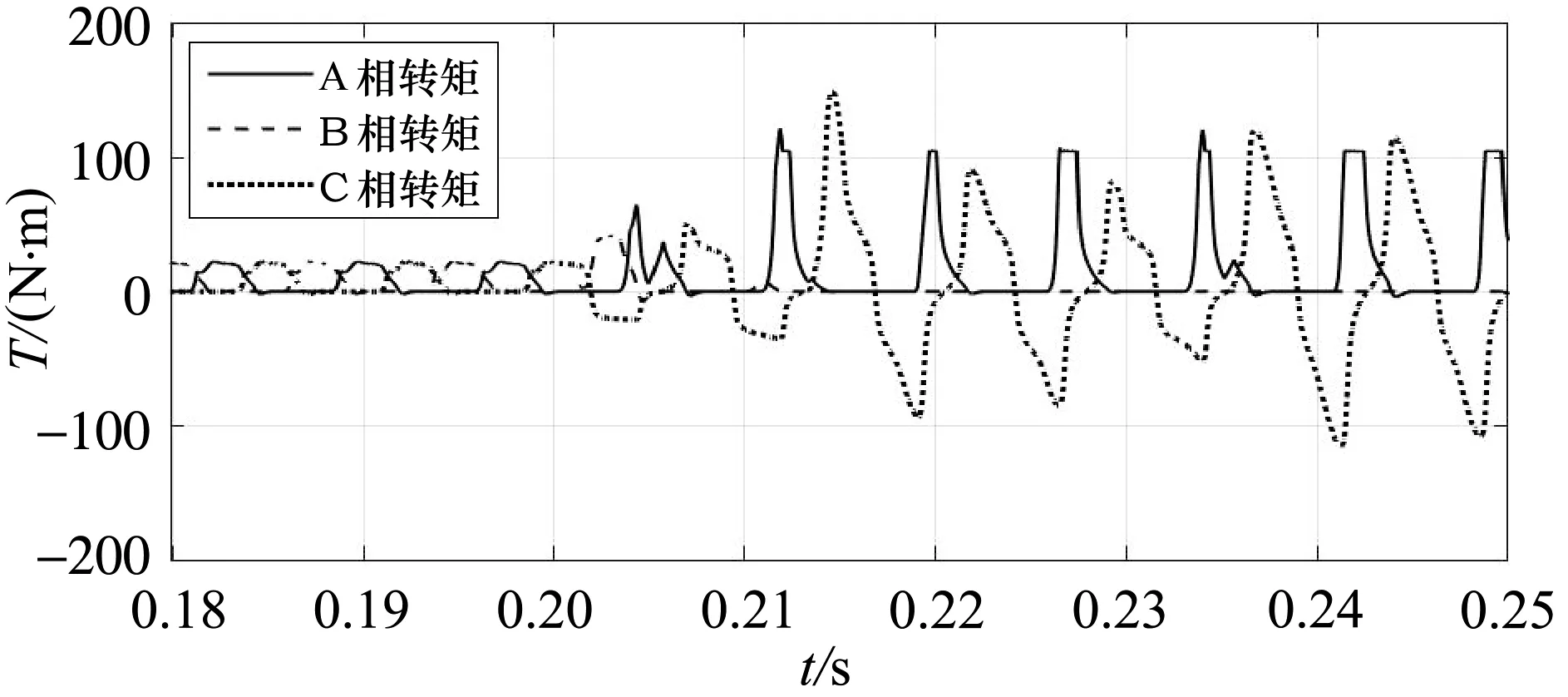
图8 C相短路故障时SRM三相转矩
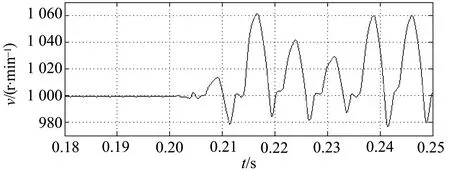
图9 C相短路故障时SRM转速
根据以上分析可以看出,不管是IGBT开路故障还是短路故障,故障相的电流、转矩波形趋势均会发生变化,同时会引起非故障相的电流、转矩波形趋势发生变化。并且故障时,开关磁阻电机均能在原来的转速附近继续运行,在缺乏足够经验的情况下,难以通过目测电机的运行状态判断功率变换器是否故障。即使发现了变换器故障,也难以通过传感器波形准确定位到故障相,同时难以确定故障类型,所以针对这一难点,本文对功率开关管进行故障相定位和故障类型检测研究。
2 算法介绍
本文采用XGBoost算法进行数据建模,该算法是梯度提升决策树(Gradient Boosting Decision Tree,GBDT)算法[8]的优化和延伸。在GBDT的基础上,XGBoost引入了正则项,可有效防止模型过拟合;其次,XGBoost算法不仅使用一阶导数计算伪残差,还计算二阶导数,可快速地构建新的基模型。
XGBoost算法的目标函数为[9]:
(1)

函数f(x+Δx)在点x处用泰勒公式展开:
(2)
则t时刻的损失函数可近似为:
(3)
式中,gi为t-1时刻的损失函数的一阶导数:
(4)
hi为t-1时刻的损失函数的二阶导数:
(5)
则目标函数可近似为:
(6)
正则化项Ω(ft)表示树的复杂度[10]:
(7)

3 模型构建
首先通过获取历史数据训练分类器,再利用建立好的分类器进行SRD功率变换器故障定位。其控制流程如图10所示。
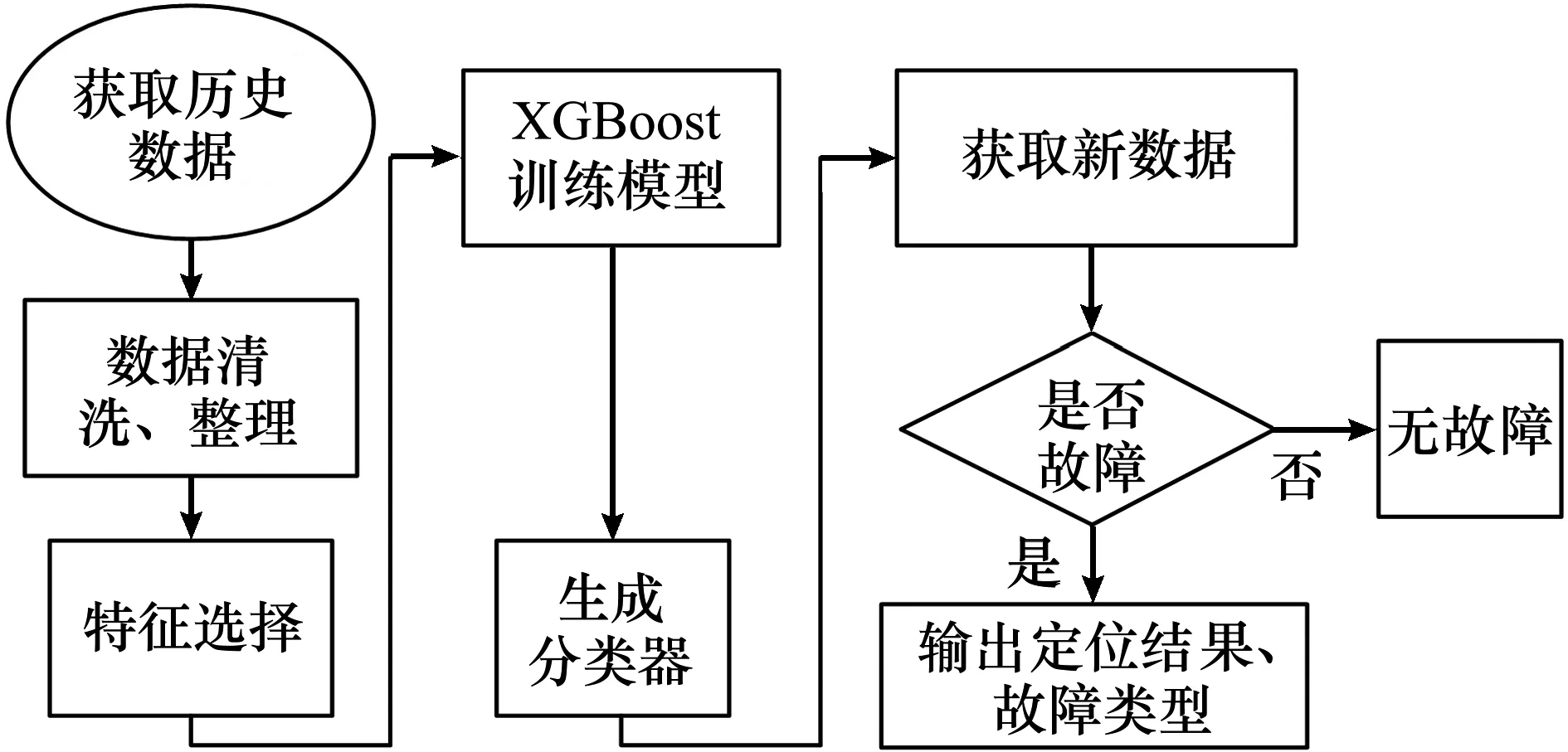
图10 故障定位流程
根据前文故障类型分析可知,当开关磁阻电机调速系统功率变换器任意一相IGBT发生短路或开路故障时,A、B、C三相电流将不再对称,会直接导致输出转矩产生波动,且不同负载的情况下,电机转速也会跟随负载变化发生不同程度的波动;同时电机的正常运行还依赖于准确的位置反馈。
基于上述分析,定义ABC三相电流(Ia,Ib,Ic)、ABC三相输出转矩(Ta,Tb,Tc)、ABC三相位置信息(θa,θb,θc)、电机转速(v)作为特征向量x,即:
x=(Ia,Ib,Ic,Ta,Tb,Tc,θa,θb,θc,v)。
根据功率变换器故障点的不同,将故障分为A相IGBT短路、A相IGBT开路故障;B相IGBT短路、B相IGBT开路故障;C相IGBT短路、C相IGBT开路故障和IGBT无故障7种情况,故障种类标签设置为y,如表1所示。

表1 故障种类标签设置
在Matlab/Simulink环境下,以三相12/8极开关磁阻电机为控制对象搭建开关磁阻电机直接瞬时转矩控制的调速系统,该系统主要包括SRM电机本体、功率变换器、转矩分配器、转矩估计器、比例积分(PI)调节器、位置检测模块、电流检测模块以及速度检测模块等[11]。SRD系统仿真结构框图如图11所示。
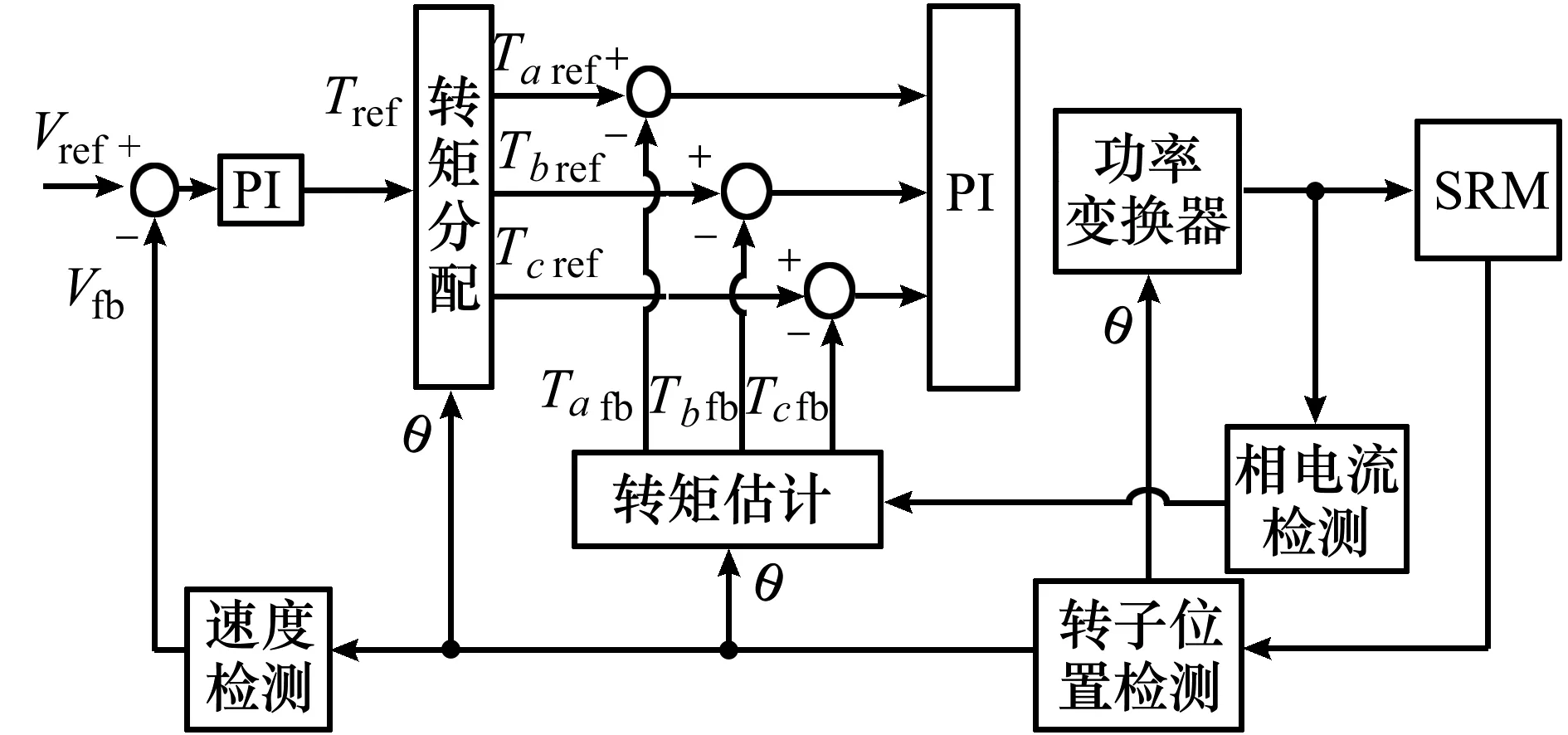
图11 SRD系统仿真结构框图
获取数据时,给定转速Vref以300 r/min为初始值,5 r/min为步长,1 000 r/min为终止值逐步增加;负载转矩以0 N·m为初始值,1 N·m为步长,100 N·m为终止值逐步增加,在不同转速、转矩的情况下分别设置符合表1的6种故障,最终随机获取2 000组无故障数据、2 000组A相IGBT短路和开路故障数据、2 000组B相IGBT短路和开路故障数据、2 000组C相IGBT短路和开路故障数据。将8 000组数据按7∶3的比例切分,5 600组数据作为训练集,用于训练分类器模型;2 400组数据作为验证集,用于测试分类器的精度。
根据获取的数据进行数据清洗整理,并采用XGBoost算法建模,综合使用准确率、召回率、f1-score对模型进行评估,评价指标定义如下:
1)准确率:
(9)
2)精确率:
(10)
3)召回率:
(11)
4)f1-score:
(12)
在式(9)~(12)中,TP(True Positive)为真正例,表示将正类正确预测为正类数;FP(False Positive) 为假正例,表示将负类错误预测为正类数;TN(True Negative) 为假负例,表示将正类错误预测为负类数;FN(False Negative) 为真负例,表示将负类正确预测为负类数。评估结果如表2所示。
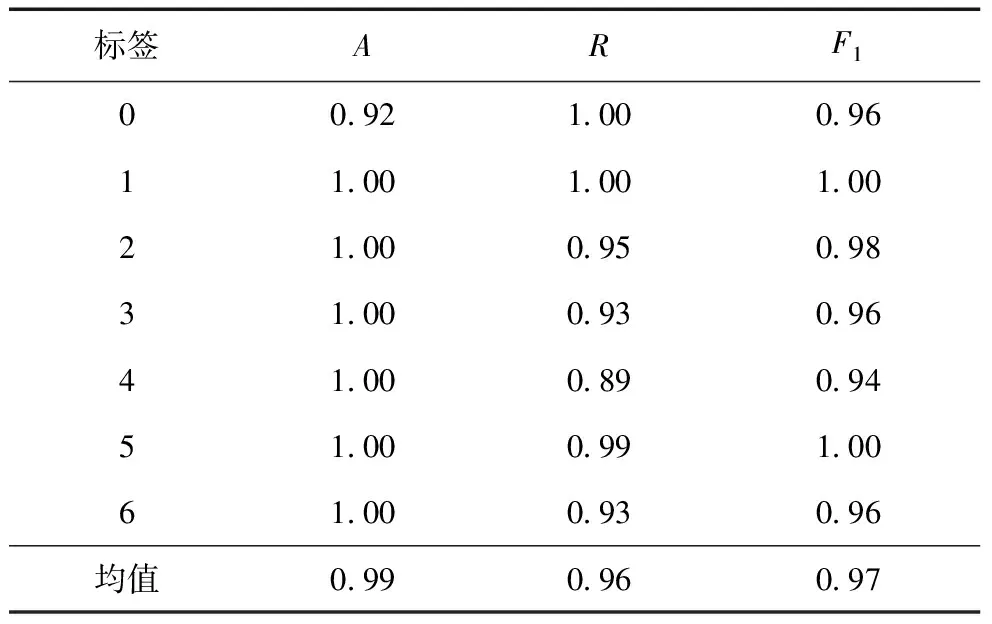
表2 评估结果
由表2可知,使用XGBoost算法训练的分类器对6种故障类型进行分类,其准确率平均值达到99%,召回率平均值达到96%,f1-score平均值达到97%。其中,准确率表示被分为正类的样本中实际为正类的样本比例,用于评价结果的质量。召回率表示实际为正类的样本被分为正类的样本比例,用于评价结果的完整性。f1-score则是综合考虑精确率和召回率的结果。根据评估结果可以看出分类器性能良好。
为更好地说明XGBoost算法的性能,以GBDT算法和SVM算法训练分类器进行对比分析,所使用的数据集与XGBoost算法一致,3种不同算法返回的结果如表3所示。
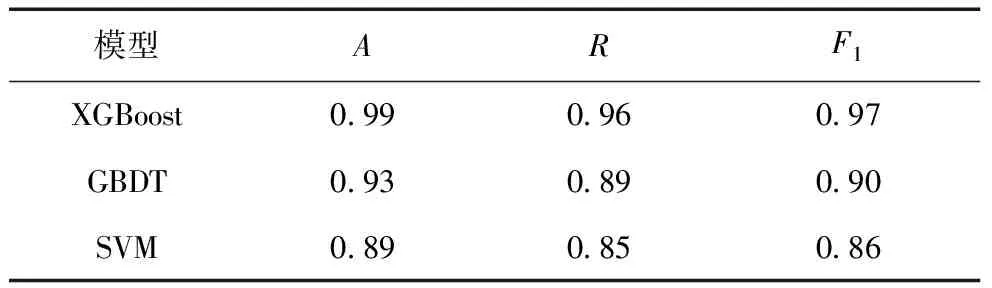
表3 不同分类器结果对比
从表3可以看出,使用XGBoost算法训练的分类器,其准确率、召回率、f1-score均优于GBDT算法和SVM算法训练的分类器。
4 结束语
本文构建了一种基于XGBoost算法的SRD功率变换器故障定位方法。以12/8极SRM为对象,通过Matlab/Simulink获取不同类型的故障数据并训练分类器,其准确率、召回率、f1-score均达到96%以上。同时与GBDT、SVM算法进行对比分析,结果表明本文使用的分类器能更准确地判断出功率变换器的故障相及故障类型。证明基于XGBoost算法的SRD功率变换器故障定位方法可行且效果佳。
