基于无人机多光谱影像的完熟期玉米倒伏信息提取
2023-10-10李华森夏晨真张星宇
李华森,夏晨真,张星宇,王 寅,3,张 月,3
(1.吉林农业大学资源与环境学院,吉林 长春 130118;2.吉林省商品粮基地土壤资源可持续利用重点实验室,吉林 长春 130118;3.秸秆综合利用与黑土地保护教育部重点实验室,吉林 长春 130118)
粮食是人类赖以生存的宝贵资源,粮食安全是保障国家长治久安的关键[1]。东北黑土区是我国重要的玉米生产基地,为我国粮食安全和粮食供给提供重要保障。玉米作为我国三大粮食作物之一,其茎秆较高且脆,易受大风、暴雨等极端天气影响而发生倒伏,从而影响产量及籽粒品质等。研究表明,倒伏是造成玉米减产的一个重要原因,一般能导致减产15%~30%,部分严重倒伏造成的损失可达到50%,甚至造成绝产[2-4]。因此,及时准确地获取黑土区玉米倒伏发生的范围和受灾程度具有重要意义[5]。
通过传统方法获取作物的受灾面积需要进行田间实地调查,耗费大量人力、物力和财力[6]。近年来遥感技术的快速发展,为大面积、高效提取作物倒伏信息提供了新的途径[7-9]。如任红玲等[10]基于HJ-1卫星遥感影像,选取植被指数、纹理特征等,采用最大似然法对遥感影像进行监督分类,最终确定玉米的倒伏面积。王立志等[11]利用多时相HJ-1B卫星CCD多光谱影像分析了抽雄期玉米倒伏前后多种植被指数的变化,利用RVI比值植被指数进行数理统计及阈值划分并最终确定玉米倒伏的受灾范围,总体分类精度为85.7%,Kappa系数为0.804。李宗南等[12]利用Worldview-2高分辨率影像,分析了灌浆期玉米倒伏地块的纹理特征,从而识别出玉米的倒伏区域。但是,由于卫星离地面距离较远,且易受大气等因素的干扰,所以利用卫星平台对作物倒伏的识别精度较低[13-15]。
近年来无人机遥感技术迅猛发展,与卫星平台相比,无人机技术具有诸多优势,例如受天气影响小,能够在多云情况下获得清晰影像;分辨率高,可达厘米级,能实现对田块级农作物的精准识别;操作简单,飞行高度低且时间灵活,能获取中小尺度范围内高时空分辨率的影像数据,有效弥补了卫星遥感的不足,可满足精准农业的需求[16-17]。Liu等[18]利用无人机采集的热红外和RGB影像,构建了水稻倒伏的识别模型,该模型的误差率小于10%。毛智慧等[19]利用无人机获取研究区的数字表面模型,并结合影像的色彩特征对图像进行分类,从而得到玉米的倒伏信息,在以小区为单元的统计分析中误差不到10%。Han等[20]使用无人机直接获取了倒伏玉米的多光谱及可见光图像,并通过提取纹理、植被指数、冠层结构等参数,构建了2种用于倒伏信息提取的Logistic模型,最终利用2个模型判断是否倒伏的概率分别为85%和90%。
上述识别玉米倒伏的方法中大多为利用倒伏及未倒伏玉米间的光谱差异,利用监督分类的方法并结合纹理、植被指数等参数进行倒伏信息的提取。但是,适用于遥感影像的分类方法有很多种,包括面向像元的监督分类法(如支持向量机、最大似然法、随机森林、平行六面体等)、非监督分类法(如ISODATA、K-Means等)、面向对象的分类方法等,究竟哪种方法更适合于对玉米倒伏信息的提取尚不清楚。Logistic回归模型具有训练快、效果好、可解释性强、便于观测样本概率分数等优点,已广泛应用于金融、贸易经济、临床医学等方面,但在玉米倒伏信息提取应用中的研究较少。因此,本文采用了面向对象分类方法、面向像元的最大似然法、及多元Logistic回归模型3种方法,并结合影像原始光谱波段、光谱指数、和纹理特征等进行玉米倒伏信息的识别。
本文基于研究区的无人机多光谱影像,利用从影像中提取的原始光谱特征、光谱指数及纹理特征,对比面向对象分类方法、最大似然法和多元Logistic回归3种模型,进行完熟期玉米倒伏区域的定量识别,并利用在影像上目视选择的样本进行倒伏信息识别精度的验证,以期寻求区分不同玉米倒伏状态的敏感特征及特征组合,研究结果可为玉米倒伏后受灾面积的精准提取及灾后农业生产、政府决策等提供数据基础和技术支持。
1 材料与方法
1.1 研究区概况
研究区位于吉林省梨树县四棵树乡的王家桥村(43°14′48.9″N,124°29′09.9″E)(图1,见203页)。土壤类型为黑土,主要种植作物为玉米。该区域属北温带半湿润大陆性季风气候,无霜期155 d,年均气温6.5℃,年日照时长2 541 h,作物生长期内(5—10月)时长1 192 h。2020年玉米生育期内降水量约为533.4 mm。日均气温20.80℃,>10℃积温3 030℃。
1.2 试验设计
通过设置不同的种植密度、耕作方式、养分投入量和来源、肥料施用运筹等田间管理模式对各试验小区进行区分。试验共设置4个处理,各处理包括4次重复,具体包括处理1:对照(CK),不施肥处理;处理2:农民习惯(FP),通过进行农户问卷调查的方式,获得当地农民主流的玉米田间管理方式;处理3:高产栽培(HY),以最大化提高玉米产量为目标,设置最高的种植密度并结合最大的养分投入和多次施肥;处理4:土壤-作物系统综合管理(ISSM)[21],根据研究区的气候条件和土壤状况,通过合理的养分供应和相对简化的施肥方式,实现提升土壤肥力、作物产量及资源利用效率的管理方式。试验小区的面积为120 m2(20 m×6 m),处理总面积为1 920 m2,小区设置见图2。供试玉米品种为良玉99。在试验开展期间,于4月下旬—5月上旬播种,9月下旬—10月初收获。

CK:对照 Control;FP: 农民习惯栽培 Farmers habits cultivation model;HY:高产栽培 High-yield cultivation;ISSM:土壤-作物系统综合管理栽培 Integrated soil-crop system management model图2 试验小区设置Fig.2 Settings of the experimental plots
1.3 数据的获取与处理
选择晴朗无云、无风或微风天气,于2020年9月24日10∶00—15∶00时进行研究区无人机影像的采集。无人机平台采用深圳市大疆创新科技有限公司生产的大疆Matrice 600 Pro六旋翼无人机,其最大载重为6 kg,最大水平飞行速度为65 km·h-1。传感器选择 parrot sequoia 农业遥感专用4通道多光谱相机,该相机由多光谱传感器和光照传感器两部分组成,包含4个120万像素的单波段相机和1个1600万像素的RGB相机。光谱仪镜头选择聚焦25 mm,对应的视场角约为13°。起飞前对无人机进行航线设定和白板校正,航高为100 m,空间分辨率为5 cm。影像采集时的航向重叠度80%,旁向重叠度60%。
影像采集后,利用 Pix4D Mapper 软件进行影像拼接。几何校正以大疆Matrice 600 Pro无人机拍摄的 RGB 正射影像为参考,均匀且随机地在影像上选取部分点位进行几何校正,确保校正后影像误差小于0.5个像元。随后进行辐射定标,辐射定标采用伪标准地物辐射纠正法,以地面1.5 m×1.5 m的白板为参考,利用ENVI 5.3软件中的FLAASH模块进行大气校正,随后得到研究区影像中各像元的反射率值。
通过实地测量以获得研究区倒伏玉米、未倒伏玉米和半倒伏玉米的实际面积,分别为2 062.29、2 754.71、1 210.52 m2,用于后续验证3种模型方法对玉米倒伏信息的提取精度。
1.4 玉米倒伏敏感特征的选取
本研究选取从无人机影像中提取的光谱指数和纹理特征等信息作为识别玉米倒伏信息的特征。其中光谱指数包括15种指数,详见表1。
纹理特征是指地物实体表面所共有的内在特征,可反映区域内的灰度变化,并且不依赖于地物的颜色与亮度[25]。这些量化值主要包括均值 (Mean)、方差 (Variance)、差异性(Dissimilarity)、熵 (Entropy)、二阶矩 (Second Moment)和相关性 (Correlation)、逆差距 (Homogeneity)、对比度 (Contrast)。本研究采用灰度共生矩阵(Gray level co-occurrence matrix, GLCM)纹理分析法,基于二阶概率统计方法(Co-occurrence measures)对这8种滤波特征在ENVI 5.3软件中进行提取。
1.5 玉米倒伏信息的提取与精度验证
1.5.1 面向对象分类法 面向对象分类法是指采用分割算法在分类前将同质邻近像元构建为光谱、纹理、颜色特征等信息相似的同质均匀对象,并将这个对象作为提取地物的最小单元,再通过每个对象上的特征信息对这些影像对象进行分类[26-27],进而实现对目标地物特征的识别。影像完成分割后,构成影像的基本单元从像元变成了包含各种特征的对象,在一定程度上降低了混合像元对地物特征信息提取的干扰。本研究中的面向对象分类方法在eCognition 9.0软件中实现。
1.5.2 最大似然分类法 最大似然分类法是通过遥感影像的光谱统计特征,对类别样本对应的影像数据进行分类处理,并记录影像数据隶属各类别的数量。根据训练样本提取的特征向量,构造出各类别的多维正态分布模型,即概率密度函数或者概率分布函数[28-30],最终通过最大似然分类方法进行判断,得到较为准确的地物分类结果。
1.5.3 多元Logistic回归模型 Logistic回归模型是指研究某个无序或有序多分类的目标变量与有关因素的关系,它分为二分类和多分类两种回归模型[6]。其中多元Logistic回归模型是一种因变量为多分类的Logistic回归,其模型构建简单且推广度较好。本文中将倒伏玉米设置为1,半倒伏玉米设置为2,未倒伏玉米设置为3,进行模型的构建。
最后,本研究采用较为常用的混淆矩阵方法进行玉米倒伏信息提取结果的精度评价。为保证本次样本选择的有效性,本研究通过手动方式在研究区均匀选取400个样本点,并同步应用于对3种分类方法的精度验证。
2 结果与分析
2.1 不同田间管理条件下的玉米倒伏状态
实地测量倒伏面积时发现,倒伏玉米多分布在CK和FP处理中,半倒伏玉米多分布在HY处理中,未倒伏玉米多分布在ISSM处理中。在极端天气下玉米倒伏不仅与天气情况相关,也与不同的田间管理条件相关。当作物氮肥施用不足(如CK和FP处理),植株根系发育较差,面临恶劣气候时易发生倒伏现象;但氮肥施用量也不是越高越好,当其处于过量状态时(如HY处理),会造成植株徒长,植株整体韧性较弱,同样容易造成倒伏,因此适量施用氮肥有利于玉米抗倒伏。
2.2 不同玉米倒伏状态的光谱特征差异
本研究通过计算每种类型的玉米倒伏状态所对应的像元在不同波段的光谱反射率均值,绘制出3种待识别类型(倒伏、半倒伏、未倒伏)在不同波段的光谱反射率平均值曲线。由图3可知,倒伏玉米在各波段的反射率值均大于半倒伏、未倒伏玉米,倒伏玉米与半倒伏玉米之间的光谱反射率差异较大,半倒伏与未倒伏玉米之间的光谱反射率差异相对较小,半倒伏玉米与其他状态玉米在红光波段的差值较大。
2.3 不同玉米倒伏状态的纹理特征差异
通过计算采样区内每种玉米倒伏形态的纹理特征均值,本文分析了不同倒伏形态间纹理特征的相对差异度。如表2所示,对比倒伏与未倒伏玉米的纹理特征,差异最大的是相异性指标,两种倒伏形态的相对差值为0.28,比其他纹理特征平均高出0.13;对比倒伏与半倒伏玉米的纹理特征,差异最大的是对比度指标,两种倒伏形态的相对差值为0.42,比其他纹理特征平均高出0.26;对比半倒伏与未倒伏玉米的纹理特征,差异最大的是对比度指标,两种倒伏形态的相对差值为0.19,比其他纹理特征平均高出0.12;综上,区分3种玉米倒伏形态的难点在于对未倒伏与半倒伏玉米形态的区分。
2.4 不同玉米倒伏状态的光谱指数差异
光谱指数是两个或多个波段反射率进行线性或非线性的组合,不同光谱指数均值在面对倒伏的趋势上有所不同,见表3,本文中区分倒伏较敏感的指数有NDVI、GNDVI、SRVI等。NDVI从未倒伏到半倒伏、倒伏,其值越来越小,GNDVI与NDVI趋势相同,越趋向于倒伏,其值就越小。SRVI值从未倒伏到半倒伏先增加,再到倒伏状态时,反而减小至小于未倒伏状态。
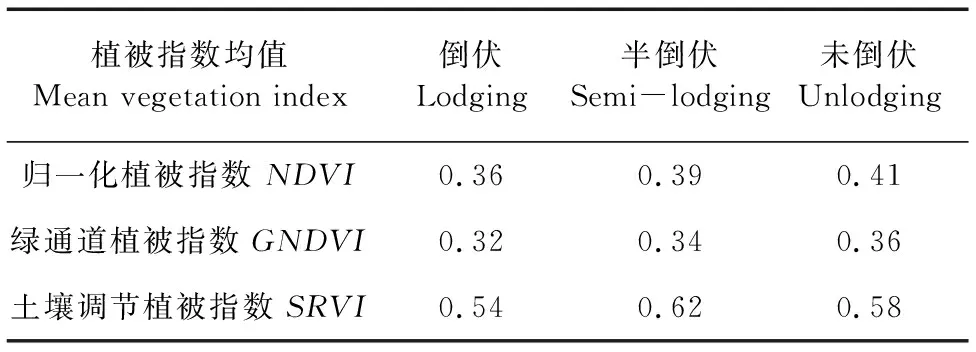
表3 不同倒伏状态植被指数均值的趋势Table 3 Trend of mean vegetation index in different lodging states
2.5 玉米倒伏信息的提取
2.5.1 面向对象方法 在利用面向对象方法进行玉米倒伏信息的提取过程中,多尺度分割中阈值如果过小会导致同一地物被过度分割,形成过多分类单元;如果将阈值设置过大会导致分类单元欠分割,不同的地物会被分割成同一对象[31]。经过多次尝试,反复目视比对得到如下分类参数:固定紧密度和形状指数的权重,得到最优的分割尺度为100;固定分割尺度和紧密度的权重,得到最优的形状指数为0.3;固定分割尺度和形状指数的权重,得到最优的紧密度指数为0.5。因此,最终得到影像分割的最佳尺度为100,紧密度权重为0.5,形状指数权重为0.3(图4)。然而,分割后的影像仍然有部分区域与实际地物不符,主要是由于同一地物可能包含不同的亮度,易造成漏分和错分的情况[26]。因此本研究还另外加入了15种光谱指数和8种纹理特征参与后续分割。后续分割过程中,经多次目视试错后确定将无人机影像的权重设为0.5,光谱指数的权重设为0.5,纹理特征的权重设为1,能够达到较好的分割效果(图5,见205页)。最后,将无人机影像、8种纹理特征及15种光谱指数全部输入到eCognition 9.0软件中,对玉米的倒伏信息进行提取及精度验证。在提取倒伏面积过程中发现对区分倒伏与未倒伏状态较为敏感的光谱指数为NDVI,区分倒伏与未倒伏状态较敏感的纹理特征为相异性。

图4 不同参数设置下的影像分割结果(研究区局部)Fig.4 Image segmentation results under different parameters (Part of the study area)
2.5.2 最大似然法 在ENVI 5.3软件中,对玉米倒伏、未倒伏、半倒伏3种类型分别选择训练感兴趣区。其中,倒伏、未倒伏训练感兴趣区的数量均为60个,半倒伏训练感兴趣区数量为80个,共计200个样本点。判断样本点的选取是否合格以及其是否能够进行较为准确的分类,可以通过验证样本之间的可分离性来进行。如果两个感兴趣区组合的可分离性值在0~2.0之间,且小于1.8则需要重新选择样本;小于1则考虑将两类样本合并成一类[32-33],各样本的分离性见表4,其中,半倒伏与倒伏状态之间分离性较小,说明区分半倒伏与倒伏状态较难,其余各类之间的分离性均较好。而后通过最大似然分类法进行分类,在选择待分类影像后,进行参数设置:选中所有分类类别,设置似然度阈值为无,数据比例系数为255,输出分类结果后进行精度评价,并生成混淆矩阵以验证提取玉米倒伏信息的精度。
2.5.3 多元Logistic模型 将多光谱影像导入ENVI 5.3软件中,随机选取200个样本点作为训练集用于建模,随后分别获取训练集200个点在红、绿、蓝3个波段的光谱均值,用SPSS对样本点进行主成分分析,提取到1个主成分,其贡献率为98.07%,计算式为:
F=0.992Rgreen+0.992Rbule+0.986Rred
式中,F为可见光波段均值的主成分提取值,Rgreen、Rblue、Rred分别为绿、蓝、红波段的均值。完成主成分分析后进行多元Logistic分析,因变量为倒伏状态,分别为倒伏玉米设置为1,半倒伏玉米设置为2,未倒伏玉米设置为3。自变量为主成分,在模型中勾选伪R方、模型拟合度信息等,参数设置置信区间为95%,最大迭代次数为100。结果显示本模型拟合度的显著性为0.021,说明模型具有统计意义,但伪R方表格中的值偏低,最大为0.55,拟合程度不佳。
2.6 提取结果的精度评价
利用3种方法提取的玉米倒伏信息精度对比如表5所示。基于面向对象方法的识别结果可知,半倒伏的漏分误差较高,大部分被错分的半倒伏对象被分为未倒伏状态,少部分被错分为倒伏状态,分类总体精度能达到88.13%,Kappa系数能达到0.83,分类精度较高。在利用最大似然分类法的玉米倒伏精度评价过程中发现,倒伏玉米多被错分为半倒伏玉米,分类总体精度为73.51%,Kappa系数为0.65。在利用多元Logistic回归模型的玉米倒伏精度评价中,倒伏玉米被错分为半倒伏玉米,未倒伏玉米同样多被错分为半倒伏玉米,分类总体精度为77.64%,Kappa系数为0.71。

表5 3种方法提取的玉米倒伏信息精度对比Table 5 Comparison of accuracy of lodging information extracted by three methods
利用3种方法对玉米倒伏信息的识别情况与实际倒伏情况对比如表6所示。相比而言,面向对象方法分别提取的玉米倒伏、半倒伏和未倒伏面积与实际面积差距最小,总体精度为88.13%,Kappa系数为0.83,最大似然法与多元Logistic回归模型总体精度分别为73.51%和77.64%。总体分析发现基于面向对象法提取的玉米倒伏信息精度最高,因此,本研究利用此方法获得研究区玉米倒伏信息的最终识别结果图(图6)。
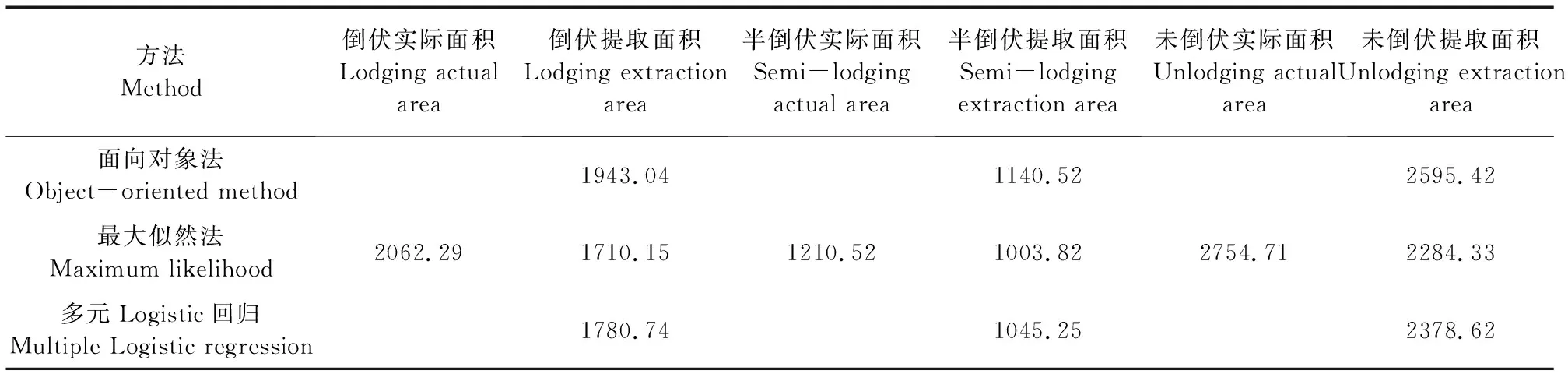
表6 3种方法提取玉米倒伏面积与实际面积的对比/m2Table 6 Comparison of the maize lodging extraction areas based on the three methods and actual lodging areas
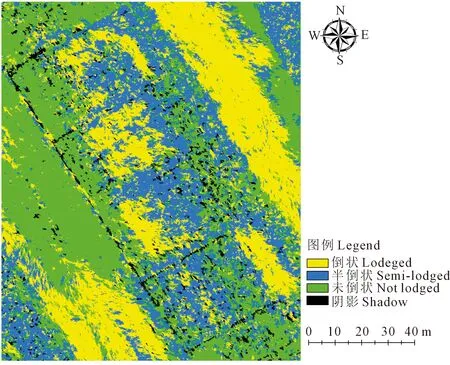
图6 最终分类图Fig.6 Final classification results of maize lodging
3 讨 论
本研究在实地测量玉米的倒伏面积时,倒伏玉米多分布在CK和FP处理中,半倒伏玉米多分布在HY处理中,未倒伏玉米多分布在ISSM处理中,由于CK处理没有进行土壤旋耕和施用化肥及有机肥,植株间水肥竞争过于激烈,作物主根发育不良,扎根较浅,造成倒伏较严重,因此CK处理地块中的倒伏玉米面积较大;HY处理中作物种植密度相对较大,且养分投入过多,因此植株的生长空间较小,透风透光环境较差。同时,由于氮肥施用过量造成植株徒长、根茎韧性较弱,在遭遇极端天气的情况下,也易发生倒伏;ISSM处理中,由于根据区域气候和土壤状况设计了作物生产体系以及对应的管理办法,并通过合理密植、适量的养分供应提升了作物产量以及资源利用效率,还提高了植株茎秆质量,减少了植株倒伏情况的发生。
倒伏与半倒伏玉米在光谱特征和纹理特征方面的差异均较大,较易区分;半倒伏玉米与未倒伏玉米在上述两方面特征上差异较小,所以本研究中分类的难点就在于对半倒伏与未倒伏玉米状态之间的区分。本文中利用对倒伏敏感的光谱指数(NDVI、GNDVI、SRVI等)与纹理特征(相异性、对比度)的组合进行分类,所得到的分类结果较好,精准度较高。
相较于卫星影像,无人机多光谱影像可提供更加精细的地物形状及纹理特征等信息,且无人机具有影像分辨率高、灵活性强、时效性高等优点,能够为获取倒伏作物的面积提供精准的数据源。本文基于从无人机多光谱影像中获取的光谱特征、纹理特征及光谱指数,并应用面向对象分类法、最大似然分类法和多元Logistic回归模型3种方法,对玉米倒伏、半倒伏、未倒伏信息进行定量提取。其中,利用面向对象分类法对玉米倒伏信息提取的精度最高,其总体精度可达到88.13%,Kappa系数为0.83。由于面向对象的分类方法可将具有相似光谱及纹理特征的对象划分到同一类别中,避免了面向像元分类方法中易出现的“同物异谱、同谱异物”现象,因此其对玉米倒伏信息的提取精度高于最大似然分类法的精度(总体精度=73.51%,Kappa系数=0.65);但是在利用面向对象方法进行玉米倒伏信息的提取时,识别精度在很大程度上依赖于对象的分割尺度。而分割尺度多是由人工判断,因此多尺度分割标准的界定主观性较强。由于分割尺度会直接影响到地物信息的识别精度,所以后续的研究将考虑对分割结果的评价,以进一步提高玉米倒伏信息的识别精度。利用多元Logistic回归模型提取倒伏信息的总体准确率为77.64%,其结果优于最大似然法73.51%的准确率,但低于面向对象分类方法88.13%的准确率。原因分析如下:在进行多元Logistic回归分析时,由于模型本身形式较为简单,难以拟合数据的真实分布,从而影响了分类的精确度,分析结果的伪R方的数据为0.55,这意味着模型仅能解释因变量55%的变化,对原始变量的变异解释稍显不足,还有部分信息无法解释,因此模型的分类精度较低。
张新乐等[15]的研究总体精度为90.18%,Kappa系数为0.84,略高于本研究精度(总体精度=88.13%,Kappa系数=0.83)。该研究利用无人机多光谱影像识别完熟期玉米的倒伏信息,采用植被指数、光谱和纹理特征等不同组合并应用最大似然法提取玉米倒伏面积,其通过多类纹理特征向量集提取的玉米倒伏面积较为准确。与之相比,本研究应用了更多的光谱指数参与分类,且对比了3种不同分类方法对玉米倒伏信息的提取精度,同时更好地区分了不同倒伏状态的差异。孙乾[2]的研究总体精度为86.61%,Kappa系数为0.83;其研究通过灌浆期玉米的多光谱影像提取了4种光谱指数、主成分以及纹理特征,并通过最大似然法对纹理特征与光谱指数组合进行分类,应用特征组合方式分类玉米倒伏,相比单独使用某种分类特征进行分类精度要高。本研究同样通过结合纹理特征、光谱特征以及光谱指数组合进行分类,应用纹理特征尽可能避免了应用光谱特征识别的“同物异谱、同谱异物”现象;与之相比,本文应用的光谱指数易于区分不同倒伏状态之间的差异,分类精度要稍高一些。综上,利用面向对象的方法进行田块尺度玉米倒伏的识别是可行的。
4 结 论
1)基于无人机多光谱影像,能够实现对田块尺度玉米倒伏信息的精准识别,且识别精度较利用卫星影像识别倒伏信息的精度高。
2)对比3种方法对玉米倒伏信息的提取精度,面向对象方法的精度最高,主要是由于其利用了从高分辨率的无人机影像中提取的光谱指数及纹理特征,避免了面向像元方法中的混合像元问题,增强了对玉米倒伏和半倒伏状态的辨识能力。
3)区分玉米倒伏和未倒伏状态的最佳特征为植被指数中的NDVI和纹理特征中的相异性,结合使用植被指数和纹理特征后,所获得的分类结果较好,精度较高。
