微光夜视成像系统最大作用距离估算与试验验证*
2023-10-10王德飞赵志刚彭孝东李永鹏
王德飞 赵志刚 彭孝东 李永鹏
(中国人民解放军63895部队 洛阳 471003)
1 引言
随着现代光电子技术的进步,微光夜视成像系统得到了广泛应用,有效视距较远的微光夜视器材有力地增强了夜间对目标的观测侦察能力[1~3]。微光夜视成像系统是利用夜间的微弱月光、星光或大气辉光等自然界中微弱的夜天光作照明,利用像增强器把目标反射回来的微弱光增强放大后转换成人眼可以观察的可见光图像,从而实现在夜间对一个只被微弱自然光照明的远距离特征目标进行观察,其最大作用距离是评价系统性能的一个重要参量,对作用距离的考核通常采用在室内测试微光分辨率或野外环境下实装测量的方法来完成,但野外测试时受天气动态变化的影响较大,且耗时费力,效费比不高;室内测试时虽然可以构建尽可能逼真的模拟环境,但没有考虑照明光源的光谱分布问题,存在一定的局限性[4~5]。因此,需要采用建模仿真计算与实装试验测试相结合的手段来评估微光夜视成像系统的作用距离,对微光夜视成像系统的理论研究和实践应用都有十分重要的意义。
狄慧鸽等[6~7]在计算微光夜视成像系统的作用距离时考虑了亮度增益的影响,并对其进行了深入分析;刘松涛[8]等分析了极限分辨率曲线法、光子受限法和改进的光子受限法三种微光夜视仪的作用距离估算原理;张竹平[9]等从经典分辨力计算方程出发,结合分辨力与焦距的关系,对其进行了修正和补充,通过系统调制传递函数曲线与空间频率函数求出系统的分辨力值,但均存在影响要素考虑不够周全的局限性。本文选用高性能超二代像增强器的微光夜视成像系统作为研究对象,考虑到物镜直径、目标对比度、环境照度和系统传递函数与空间频率的匹配等诸多因素的影响,建立了较为全面的分辨力计算方程,并结合设备设计参数进行了作用距离估算,同时采用实装野外测试的方法验证了估算的工程有效性,对微光夜视成像系统的作用距离考核有较好的指导意义[10~12]。
2 微光夜视成像系统的分辨力
光学系统的分辨力是指光学系统刚好能分辨的两个物体之间的最小间距,在实际成像过程中,从一个物点发出的光线通过光学系统后得到的是一个具有一定面积的光斑,即光通过光学系统的孔径光阑形成的衍射像。如果两个点目标靠的很近,这两目标的衍射像将重叠,无法分辨;如果把这两个点目标间隔一定距离放置,使其经过光学系统后所成的像恰好能被人眼分辨出是两个点目标,此时这两个点目标是可以分辨的[11]。微光夜视成像系统属于观察远距离目标的设备,以能区分开两物点对物镜所张开的最小角度表示系统的分辨力,其分辨力由两部分决定[10~13]:一部分由光量子噪声决定的αk;另一部分是微光夜视成像系统的性能参数决定的αS,可以利用光学传递函数进行计算。
2.1 由光量子噪声决定的微光夜视成像系统分辨力
在纯光量子噪声限制下的理想微光夜视系统极限分辨角为[8~13]
其中k 为系统能分辨出两物体元素所需的最小信噪比,通常由试验测试确定;D 为系统物镜的入瞳直径;C 为输入信号的对比度,C=(Lo-Lb)/(Lo+Lb);e为电子的电荷量;Lm为目标的平均亮度,即Lm=(Lo+Lb)/2;τ0为物镜的透过率;τd为大气透过率;t为人眼的积累时间;S 为像增强器阴极积分灵敏度(μA/lm)。
令C′=(Lo-Lb)/Lo,则式(2)可化为
其中Lo为目标的亮度,Lb为背景的亮度。
2.2 基于光学传递函数的微光夜视系统分辨力计算
该方法依据人眼分辨力与观察目标的亮度、目标与背景对比度关系曲线,得到观察目标通过微光夜视成像系统后到达人眼的亮度对比度。同时利用作图的方法,得到某型微光夜视成像系统的分辨力。夜天微弱光照明时目标的亮度与目标的反射比ρ0和夜天微弱光照度E0有关,目标的亮度为[11~13]
被观察特征目标的亮度通过某型微光夜视成像系统物镜之后,人眼目视到的目标亮度Le可以用下式表示[15~16]:
其中Le为人眼目视得到目标的亮度;G 为器件的亮度增益,单位为cd·m-2/lx;τ0为物镜的透过率;τd为大气透过率;τe为目镜的透过率;D/f0为相对孔径。
在室内的稳定环境中测量系统的分辨力时,可以不考虑大气衰减效应,通常取τd=1,则式(5)可以简化为
人眼通过微光成像系统观察目标像的对比度Ci,可以由下式算出[10]:
其中M0、Me、Mg为物镜、目镜和像增强器对应空间频率的调制传递函数,C为特征目标的对比度。
根据文献[14~17]提供的人类眼睛的分辨力与目标亮度、对比度的关系数据,得到了不同目标亮度时,对比度与人眼分辨力的关系如图1所示。
光学传递函数计算微光夜视系统的分辨力步骤如下[10,18]:
1)依据微光夜视成像系统设计指标要求的目标照度,利用式(6)计算微光夜视成像系统的目标照度[18]。
2)按照图1 给出的不同目标亮度时对比度与人眼极限分辨力曲线图,利用数学插值的方法求出不同目视亮度情况下,不同对比度所对应人眼的极限分辨角。

图1 不同目标亮度时对比度与人眼极限分辨力的关系
3)根据本次最大作用距离估算所采用的微光夜视成像系统探测器(超二代像增强器1XZ18)的设计参数,参考文献[5~10]提供的不同空间频率时物镜、目镜和像增强器对应的调制传递函数,利用式(7)计算出不同空间频率目标像的对比度Ci。
4)基于微光夜视成像系统探测器阴极极面上的空间频率μ和物镜焦距f0,就可以把空间频率转换成对应的系统物方空间的夹角αμ。
5)在图1上以同样的比例画出Ci与αμ的曲线,由于Ci为微光夜视成像单元全系统传递函数确定的像面对比度,αμ为由式(8)所定义的空间频率对应的微光夜视成像系统物方空间角,两条曲线的交点对应角度即为由光学传递函数所定义的角分辨力αS。
6)微光夜视成像系统的分辨力α为由光量子噪声决定的分辨力αk的平方与由光学传递函数计算的微光夜视成像系统分辨力αS的平方之和的算数根,即:
3 微光夜视成像系统的视距估算
以某型微光夜视成像系统为例,系统的物镜如瞳直径为D=18mm,焦距f0为20mm,物镜透过率τ0为0.7,像增强器积分灵敏度为S=600μA/lm,像增强器的亮度增益G 为100cd/m2·lx,目镜的透过率τe为0.72,D/f0为相对孔径;大气透过率τd为0.93。目标的环境照度为E0=3×10-2lx,目标的反射比为ρ0=0.9,目标的对比度为C=0.85。
由式(4)可知目标的亮度为L0=3×10-2×0.9/3.14=0.86 × 10-2cd/m2;C=(Lo-Lb)/(Lo+ Lb)=(0.86 ×10-2-Lb)/(0.86×10-2+Lb)=0.85,得到Lb=0.12×10-2cd/m2。因此,目标的平均亮度Lm=(Lo+Lb)/2=0.49×10-2cd/m2。
1)用光量子噪声法计算系统的理想分辨力
2)用光学传递函数计算系统的分辨力
目视亮度的计算可以由式(5)得到:
依据图1 中的0.474asb 和0.205asb 的两条曲线用内插值法求出0.31asb时人眼的分辨力曲线(C-α曲线)。依据文献[8~10,15~17]提供的微光夜视成像系统的系统传递函数和式(7)、(8),求出Ci,画出Ci与αμ的曲线,将C-α曲线与Ci-αμ曲线以同一比例画图,两条曲线的交点即为对应目标亮度时由光学传递函数确定的分辨力,如图2所示。
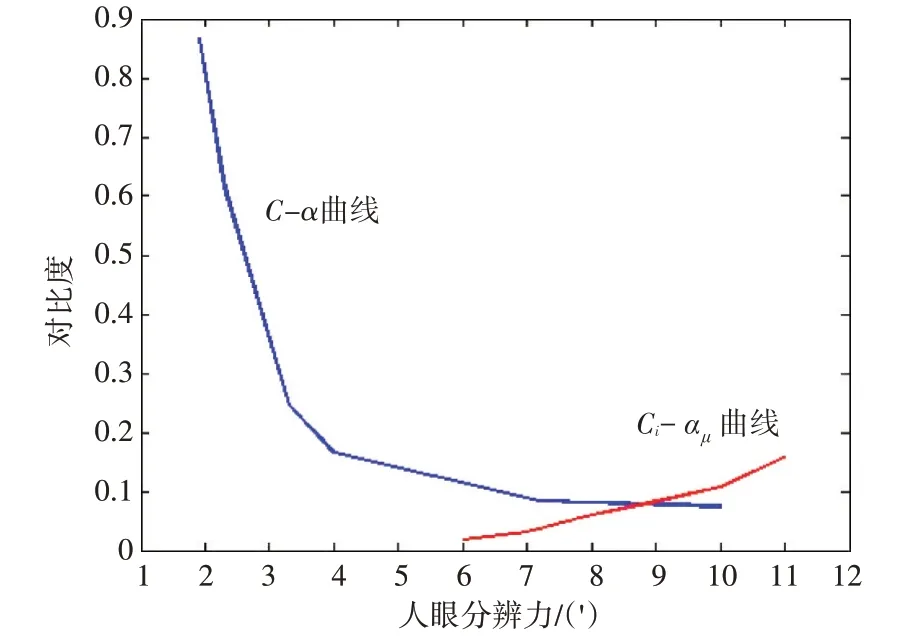
图2 同一比例的C-α曲线与Ci-αμ 曲线
由图2 可以看出,该型微光成像系统目方分辨力为8.9',也就是说αS=8.9'。
3)系统的综合分辨力可以由式(9)进行计算
根据约翰逊等效条带可辨识准则,人眼发现、识别和辨认特征目标对象所需的空间频率,对于每一目标临界尺寸相应的分辨角α为[12,19]
H 为特征目标的外形临界尺寸,L 为特征目标到微光夜视成像系统的距离,n 为目视情况下发现、识别和辨认目标所对应的空间频率。n=1 时,被观察特征目标的目视等级为发现;n=2 时,被观察特征目标的目视等级为识别;n=4 时,被观察特征目标的目视等级为辨认。特征目标尺寸H 对人为0.5m(肩宽),对车辆为2m(车高)。以分别以车辆和人为例进行计算,特征目标为车时发现识别和辨认距离依次为772.20m、386.10m 和193.05m;目标为人时发现识别和辨认距离依次为193.05m、96.523m和24.13m。
4 微光夜视成像系统的视距试验验证
4.1 第一次试验验证
参与试验验证的设备有照度计1 台,某型微光夜视成像系统1套,合作目标为吉普车1台(涂装为绿色),将微光夜视成像系统架设在运输车的车顶,确保微光夜视成像系统和目标之间通视,同时目标和微光夜视成像系统之间没有其他灯光干扰,天空背景干净;选择的天气为1/4月亮的晴朗天气。
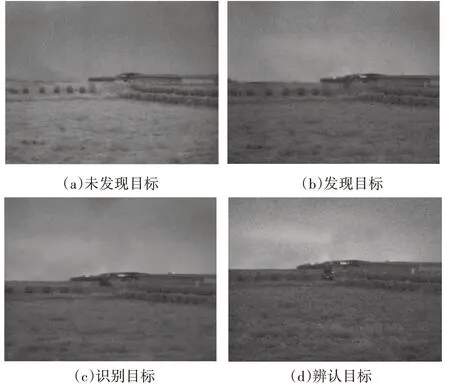
图3 第一次实装验证
试验时用照度计测得夜天空照度为1.6×10-2lx(与理论计算时的天空照度基本一致),目标车辆至测试场地的远端,打开微光夜视成像系统对目标进行探测。1)视场中未发现目标,如图4(a)所示,此时微光夜视成像系统和目标的距离为856m;2)移动车辆前行直至微光夜视成像系统的视场中发现目标,如图4(b)所示,此时微光夜视成像系统和目标的距离为739m;3)移动车辆前行直至微光夜视成像系统的视场中识别目标,如图4(c)所示,此时微光夜视成像系统和目标的距离为375m;4)移动车辆前行直至微光夜视成像系统的视场中辨认目标,如图4(d)所示,此时微光夜视成像系统和目标的距离为165m。

图4 第二次实装验证
通过实装试验测量发现,同样视觉等级条件下实际测得的距离小于理论计算的距离。其原因为实际测量时天空的照度稍微小于理论计算选择的天空照度,微光夜视成像系统输出图像至显控设备终端的传输信号有衰减,导致目视观察到的图像效果变差。
4.2 第二次试验验证
参与试验验证的设备有照度计1 台,某型微光夜视成像系统1 套,合作目标着装丛林迷彩的人,将微光夜视成像系统架设在运输车的车顶,确保微光夜视成像系统和目标之间通视,同时目标和微光夜视成像系统之间没有其他灯光干扰,天空背景干净;选择的天气为星光的晴朗天气。
试验时用照度计测得夜天空照度为8.9×10-3lx(与理论计算时的天空照度有一定差距),目标车辆至测试场地的远端,打开微光夜视成像系统对目标进行探测。1)视场中未发现目标,如图5(a)所示,此时微光夜视成像系统和目标的距离为400m;2)移动运输车前行直至微光夜视成像系统的视场中发现目标,如图5(b)所示,此时微光夜视成像系统和目标的距离为182m;3)移动运输车前行直至微光夜视成像系统的视场中识别目标,如图5(c)所示,此时微光夜视成像系统和目标的距离为85m;4)移动运输车前行直至微光夜视成像系统的视场中辨认目标,如图5(d)所示,此时微光夜视成像系统和目标的距离为20m。
通过实装试验测量发现,同样视觉等级条件下实际测得的距离小于理论计算的距离。其原因为实际测量时天空的照度小于理论计算选择的天空照度,同时作为特征目标的人着装为丛林迷彩,与青草背景对比度降低;微光夜视成像系统输出图像至显控设备终端的传输有信号衰减,导致目视观察到的图像效果变差。
5 结语
本文在充分考虑物镜直径、目标对比度、环境照度和系统传递函数与空间频率的匹配等诸多因素对作用距离影响的基础上,结合基于光量子噪声和系统传递函数计算系统分辨力的方法,建立了较为全面的系统分辨力计算方程。结合某型微超二代像增强器的微光夜视成像系统的设计参数进行了作用距离估算,同时采用实装试验的方法对作用距离进行了测试,估算结果与实装测试结果基本吻合,验证了估算方法的工程有效性,能为相同类型设备的技术指标考核提供技术支持。