实用新型专利中关于计算机程序客体的审查
2023-10-10张慧张茜
张 慧 张 茜
(国家知识产权局专利局专利审查协作天津中心,天津 300304)
0 引言
最近几年,随着计算机技术的不断发展与成熟,计算机程序类的专利申请量不断增长,而专利法对于计算机程序类的发明创造的保护又有着特殊的要求,这就造成对该类案件的审查标准有不同的观点。如何把握《专利法》《专利法实施细则》及《专利审查指南》中对于实用新型专利申请的计算机程序的审查标准是值得探讨的问题。本研究从实用新型的定义及计算机程序的定义出发,探讨我国实用新型专利的保护客体,并且着重研究目前形势下我国实用新型中涉及计算机程序类专利申请的审查。
1 实用新型专利中计算机程序的申请和审查
我国《专利法》及《专利法实施细则》对实用新型的定义如下[1-2]:“实用新型,是指对产品的形状、构造或者其结合所提出的适于实用的新的技术方案。”《专利审查指南2010(2019 年修订)》第一部分第二章对实用新型的保护客体做了进一步的规定[3]:“根据专利法第二条第三款的规定,实用新型专利只保护产品。所述产品应当是经过产业方法制造的,有确定形状、构造且占据一定空间的实体。一切方法以及未经人工制造的自然存在的物品不属于实用新型专利保护的客体。上述方法包括产品的制造方法、使用方法、通信方法、处理方法、计算机程序以及将产品用于特定用途等。”由此可见,计算机程序也被包含在实用新型专利不保护的客体范畴内。
且《专利审查指南》第二部分第九章对计算机程序进行了定义[3]:“本章所说的计算机程序本身是指为了能够得到某种结果而可以由计算机等具有信息处理能力的装置执行的代码化指令序列,或者可被自动转换成代码化指令序列的符号化指令序列或符号化语句序列。计算机程序本身包括源程序和目标程序。”《专利审查指南》中还给出了关于计算机程序的专利的审查,但上述规定仅针对发明专利,而实用新型对保护客体的规定比发明更加严格,而且实用新型实行初步审查。审查员一般不通过主动检索来获得对比文件对实用新型专利申请的技术方案进行判断和审查。由于实用新型专利对保护客体的限制,实用新型审查时对客体的判断难度要高于发明。尤其是在计算机领域,申请人为了获得实用新型专利权的保护,在撰写形式上不断变换,大量的功能性限定的使用、用保护主题为产品的形式来保护软件流程的方法,以及通过各种功能模块类型的权利要求试图掩盖计算机软件类方法的实质。在实用新型计算机、通信领域的审查实践中,如何依据《专利法》及《专利法实施细则》并运用《专利审查指南》的规定来甄别这些表现各异的方案[4],准确把握和判断申请本质,给出恰当而合理的审查结论,是目前审查实务中经常遇到的热点问题。
现阶段,实用新型专利中关于计算机程序的审查应当遵循以下三个原则[5]。
①技术方案是对软件内容的改进,这类专利申请的产品权利要求通常是以功能模块的方式撰写的装置权利要求,然而权利要求中记载的功能模块实际上不是占据一定空间的实体结构,而是通过功能模块来描述计算机软件的程序,这种权利要求所描述的技术方案属于对软件本身做出的改进,不属于《专利法》第二条第三款规定的实用新型的保护客体。
②对于权利要求中同时包含硬件结构及软件程序的技术方案,要结合说明书中要解决的技术问题,站位本领域的技术人员,判断其发明点所在,若发明点在于改进硬件结构以提升计算机性能,则其属于实用新型专利的保护客体;若发明点在计算机软件程序的改进上,则认为其不属于实用新型专利的保护客体。
③对于权利要求中仅仅包括对硬件结构的改进的技术方案,则其属于实用新型专利的保护客体。
2 案例分析
下面结合几个具体案例进行分析讨论。
案例一权利要求具体如下。
1.一种扫地机器人,它包括外壳(101)、行走轮(102)、万向轮(103)、灰尘刷(104)、风口(105)和清扫刷(106),其特征在于:其外壳为圆形外壳,在扫地机器人内部设置有驱动电机,驱动电机与行走轮连接,在扫地机器人的底部前方设置了万向轮(103),扫地机器人底部设有不断旋转以将扫地机器人附近的垃圾或灰尘扫入扫地机器人的底部的灰尘刷(104),在扫地机器人的底部中间设置风口(105)和清扫刷(106)。其对应的附图如图1所示。
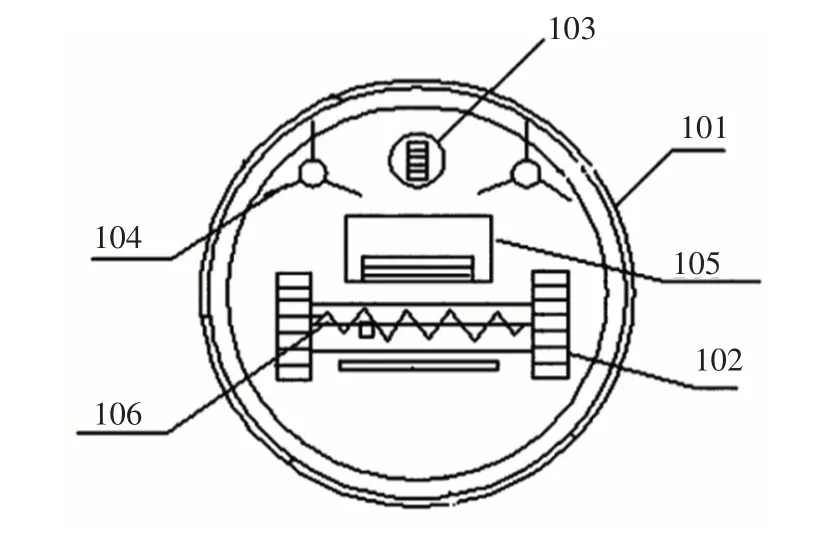
图1 案例一权利要求附图
案例分析:上述案件的权利要求请求保护的是一种扫地机器人,仔细分析案件,发现该权利要求保护的是扫地机器人的具体结构,即扫地机器人的具体组成部件,各组成部件的具体安装位置等结构。因此,其实质是对扫地机器人的硬件结构的改进,其属于《专利法》第二条第三款规定的实用新型的保护客体。
案例二权利要求具体如下。
1.一种智能化实时构建清扫地图的扫地机器人,其特征在于:它包括具有主控MCU 的主控板(1)、具有第一独立MCU 和陀螺仪的陀螺仪板(2)、具有第二独立MCU 和摄像头的摄像头板(3)、电机(4)和码盘(5);其中:
所述陀螺仪板(2)水平放置在扫地机器人机壳内并连接主控板(1);所述陀螺仪板(2)通过陀螺仪获得角度和速度信息,并通过第一独立MCU 计算扫地机器人的角度和加速度;
所述摄像头板(3)的摄像头设置在扫地机器人机壳上方,用于在第二独立MCU 的控制下采集扫地机器人的位置信息;
所述电机(4)与主控板(1)连接并驱动扫地机器人进行移动;
所述码盘(5)为扫地机器人的速度控制检测元件,用于反馈电机(4)的行程位置状态并反馈给主控板(1);
所述主控板(1)用于根据陀螺仪板(2)采集的扫地机器人的角度信息和加速度信息以及摄像头板(3)采集的扫地机器人的位置信息,计算出当前机器人的位置坐标并进行存储,进而给电机发送控制指令来驱动扫地机器人行走;同时,主控板(1)根据定位程序不断获得及存储实时的位置坐标信息,构建扫地机器人所处空间的实时地图,并将实时地图存储在主控板(1)的内存空间内。其具体结构如图2所示。
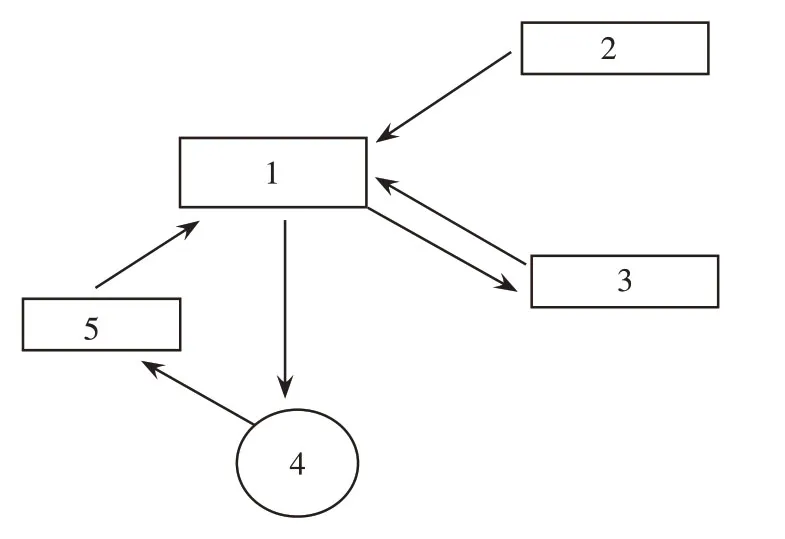
图2 案例二权利要求附图
案例分析:分析上述权利要求,发现其权利要求请求保护的技术方案中包括扫地机器人的具体结构。例如,扫地机器人具体包括主控板、陀螺仪板、摄像头板、电机和码盘,以及上述各结构各自的具体结构(即陀螺仪板包括第一独立MCU 和陀螺仪及摄像头板具体包括第二独立MCU 和摄像头)和上述各结构的具体安装位置及连接关系。然而其权利要求请求保护的技术方案中又包含对计算机软件程序的改进。例如,技术特征“主控板用于根据陀螺仪板采集的扫地机器人的角度信息和加速度信息以及摄像头板采集的扫地机器人的位置信息,计算出当前机器人的位置坐标并进行存储,进而给电机发送控制指令来驱动扫地机器人行走”的实质并非对主控板的结构、位置及连接关系的改进,上述技术特征实质是通过对主控板进行计算机软件编程来实现的。
进一步分析其说明书:该案件的说明书中记载了“扫地机器人是一种智能家用清洁电器,它会按照预设的路线在室内反复行走完成地板清理工作,省去了做家务的时间和精力,深受人们的喜爱。然而现有的扫地机器人并不能对其位置进行定位,无法根据扫地机器人的实时位置规划清扫工作。针对现有技术中的不足,本发明提供能够实时定位的扫地机器人。”结合说明书记载的上述内容,可以得出上述权利要求请求保护的技术方案既包含硬件结构的改进,又包含软件内容的改进。因此,其不属于《专利法》第二条第三款规定的实用新型的保护客体。
案例三权利要求具体如下。
1.一种基于深度相机的扫地机器人控制系统,其特征在于,包括:
地图构建模块,用于根据扫地机器人的深度相机获取的环境色彩信息及深度信息,定位所述扫地机器人的位置,构建所述扫地机器人周围的环境地图;
路线规划模块,用于根据所述地图构建模块定位的扫地机器人的位置及构建的环境地图,规划所述扫地机器人的清扫路线;
传感信息处理模块,用于根据所述扫地机器人的传感器装置采集的传感信息,获取所述扫地机器人移动的方向调整信息;
主控模块,用于根据用户设定的清扫模式,控制所述扫地机器人按照所述路线规划模块规划的清扫路线进行相应的清扫作业,且在所述扫地机器人移动的过程中,根据所述传感信息处理模块获取的方向调整信息,控制所述扫地机器人调整行走方向。
2.根据权利要求1所述的一种基于深度相机的扫地机器人控制系统,其特征在于,所述地图构建模块包括:
局部建图子模块,用于根据所述扫地机器人移动时采集的深度相机采集的环境色彩信息及深度信息,获取所述扫地机器人的移动轨迹及各个位置的局部地图;
检测子模块,用于对所述扫地机器人进行闭环检测,判断所述扫地机器人是否回到了原点;当判定所述扫地机器人未回到了原点时,继续通过所述局部建图子模块继续获取下一位置的局部地图;
全局构图子模块,用于当所述检测子模块判定所述扫地机器人回到原点时,将所述扫地机器人的移动轨迹和局部地图修正为符合闭环检测的结果,完成室内地图的构建。其对应的附图如图3所示。
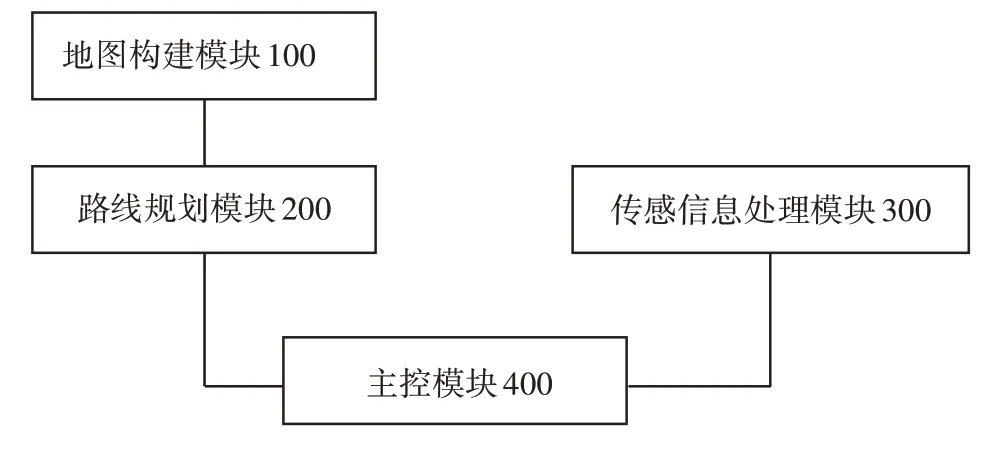
图3 案例三权利要求附图
案例分析:分析上述权利要求,该权利要求请求保护的是基于深度相机的扫地机器人控制系统。从主题名称上来看,本申请请求保护的是一种扫地机器人控制系统,即一种请求保护产品的权利要求。该专利申请表面上为一种结构类权利要求的写法,即扫地机器人控制系统具体包括地图构建模块、路线规划模块、传感信息处理模块和主控模块等四个模块。然而仔细分析权利要求就会发现,上述地图构建模块、路线规划模块、传感信息处理模块和主控模块等四个模块并非占据一定空间的实体,其实质是通过功能模块的表述形式来描述计算机软件程序实现的功能。上述权利要求请求保护的控制系统并没有对扫地机器人的数字电路/硬件实体进行改进,而是对扫地机器人控制器中存储的计算机程序的改进。申请人意图通过模块结构的撰写方式,来掩盖其实质上请求保护的为计算机程序本身。因此,上述权利要求实质上属于对扫地机器人中的控制软件的改进,不属于《专利法》第二条第三款规定的实用新型专利的保护客体。
通过以上几个案例的分析,得出如下结论:对于涉及计算机程序的实用新型专利申请的审查,应当站位本领域技术人员来判断某一实用新型专利申请具体请求保护的技术方案。如果权利要求中既包含对硬件的改进,又包含计算机程序,然而其所涉及的计算机程序为现有技术,或属于已知计算机程序及其常规的、适应性的应用,则权利要求不涉及对计算机程序本身提出的改进,则属于实用新型专利的保护客体。如果权利要求中既包含对硬件部分的改进,又包含了对计算机程序本身的改进,则该权利要求不属于实用新型专利的保护客体。
3 结论
本研究从《专利法》及《专利审查指南》中关于实用新型保护客体的定义出发,结合《专利审查指南》中对于计算机程序的相关规定,对于实用新型专利中关于计算机程序客体的审查,给出了具体的审查思路,并结合具体案例进行详细的分析讨论,希望能够给读者以启发。
