地铁车辆保持制动控制策略研究
2023-10-07张潜胡文斌
张潜, 胡文斌
(1.中车南京浦镇车辆有限公司,江苏 南京 210031; 2.南京理工大学自动化学院,江苏 南京 210094)
引 言
当前城市轨道交通蓬勃发展,轨道交通车辆的安全及精确控制问题越来越受到社会各界的关注。其中为了保证地铁车辆到站后停的稳,坡道动车时不发生后溜,车辆对此进行大量的探讨与研究,其中就有对保持制动的施加和缓解控制策略的研究,并对其研究成果在国内不同城市轨道交通车辆上进行了广泛的应用。
本文首先对保持制动形成的原理及带来影响进行理论推导与分析,通过建立模型量化保持制动的形成原因及必要性,推导缓解保持制动的策略;然后再对目前得到广泛应用的保持制动的施加和缓解控制策略进行研究,对不同城市、不同的应用环境选择不同的控制策略进行逐条对比;最后对目前所应用的保持制动施加和缓解控制策略进行总结,要针对实际应用环境合理选用控制策略。
1 保持制动功能描述
为了保障列车的安全运行,城轨地铁列车制动系统包括常用制动、紧急制动、停放制动,除此之外还有一项能保证城轨列车在坡道上能够安全启动的功能——保持制动,保持制动是列车制动的一项常用且重要的功能,是完全的空气制动[1-2]。主要在列车停稳后根据车辆的载荷信息自动施加保持制动力防止列车在坡道上向后溜走,以及在一定坡度的坡道启动前列车具有一定大小的制动力以抗衡列车因重力因素产生的下滑分量,保证列车在牵引力建立初期不会发生溜车现象,从而避免了因溜车可能造成的列车退行、冲突、碰撞等问题,保障列车人员安全。
当列车停靠在坡道上时,其车辆重力在坡道方向上的分量是引起车辆下滑的根本原因。具体如图1所示。
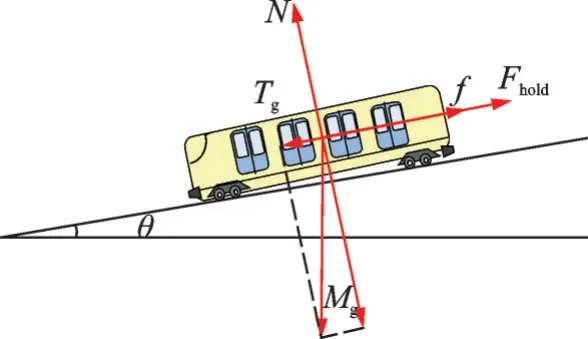
图1 保持制动原理示意1Fig.1 Schematic principle of holding the brake 1
当满足Fhold+f =Tg就能保证列车在坡道上不发生溜车。
以某一B型列车停靠在30‰的坡道上为例,介绍在坡道停车时保持制动力施加的合理范围。
首先,根据列车车重得到其在不同载荷下的下滑分量力与列车全常用制动力对比关系如表1所示。
从表1可以看出,列车施加30%最大常用制动力作为保持制动,足以保证列车在线路上的任意位置停车而不发生后溜风险。
同时考虑到一种恶劣工况,一列车载满员处于AW3载荷的列车发生故障,无法自主运行时,需要进行救援,此时安排一列空车处于AW0载荷的列车对其进行救援,救援期间两列联挂列车均停在坡道上,此时两列联挂列车的下滑力为:61159.2 (AW0)+98286.43(AW3)=159445.63 N,占载荷为AW0救援列车最大常用力的比重为:159445.6/241169=66%;故救援列车施加70%的最大常用制动力作为保持制动,足以保证此两列车在进行坡道救援期间不发生后溜风险。
据此,保持制动力一般设置为最大常用制动力30%~70%[3],保证单车和救援工况下列车在停车和启动初期都能得到有效的安全保障。
当停在坡道上的列车启动时,列车开始施加牵引力,并同步开始撤销保持制动力。具体如图2所示。
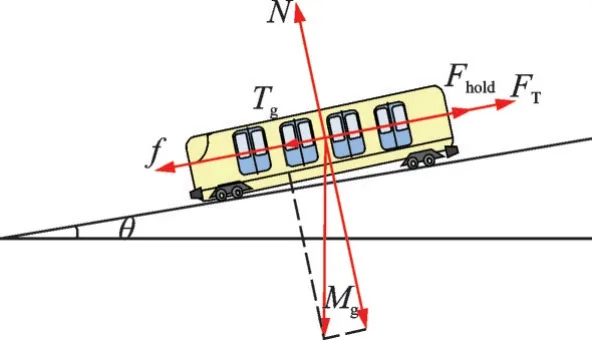
图2 保持制动原理示意2Fig.2 Schematic principle of holding the brake 2
图2中,FT为列车施加的牵引力。
当Fhold+FT>Tg+f时,列车的牵引力和保持制动力之和大于列车自身重力在坡道上的分量与阻力之和时,列车开始获得加速度,并在牵引力施加方向上动车。
2 保持制动控制逻辑描述
2.1 保持制动施加控制
地铁列车的制动是由电制动和空气制动相互配合完成,在高速状态下列车进行制动时大多由电制动负责执行,当电制动力不足时,空气制动会对其进行补偿。正常情况下列车速度下降到8 km/h(此时开始进行电制动到空气制动转换),电制动力会按照一定的斜率退出,空气制动力按照一定的斜率增加,电制动和空气制动相互配合保证在整个制动过程中减速度不发生突变,不引发列车冲动;当列车减速到0.5 km/h时(速度小于此值列车认为此时车辆处于停稳状态),列车为了能在停下后不发生移动,故施加保持制动[4-7]。保持制动的施加策略根据车辆所处运行模式不同而略有差异,当列车处于ATO模式下,保持制动控制的施加由车载ATC对其进行精准控制;列车处于信号切除状态下的手动驾驶模式时,保持制动的施加由车辆控制单元VCU根据列车自身所处状态进行精确控制;当车辆网络故障时制动控制单元自行决定保持制动的时间。具体如下:
2.1.1 ATO模式下保持制动施加
当列车处于ATO控车模式下,保持制动施加控制由信号系统施行。
当满足以下三个条件中任一条时,信号系统会将保持制动施加指令通过列车控制单元VCU发送给制动控制单元BCU,以施加保持制动:
(1)信号系统对列车运行状态进行判断。当检测到此时列车处于零速状态且车载信号系统ATC没有发出牵引指令,ATC将保持制动施加指令通过数据协议发送至列车控制单元VCU,VCU接收到信号系统发送过来的保持制动施加指令后再次转发给制动控制单元,最终由制动控制单元施加保持制动。
(2)信号系统对列车运行状态进行判断。当检测到此时列车处于零速状态且车载信号系统ATC没有发出牵引指令,此时可能由于网络链路存在的问题通讯中断,ATC的保持制动施加指令没有及时下发或者列车控制单元VCU没能准确转发,但此时制动控制单元已检测列车处于零速状态且没有收到牵引指令,如果时间长达2 s仍未收到保持制动施加指令,制动系统自行施加保持制动。
(3)信号系统对列车运行状态进行判断。当检测到此时列车处于零速状态且车载信号系统ATC没有发出牵引指令,此时列车控制单元VCU检测到列车所施加的常用制动力大于最大常用制动力的70%,制动控制单元自行施加保持制动。
控制逻辑如图3所示。
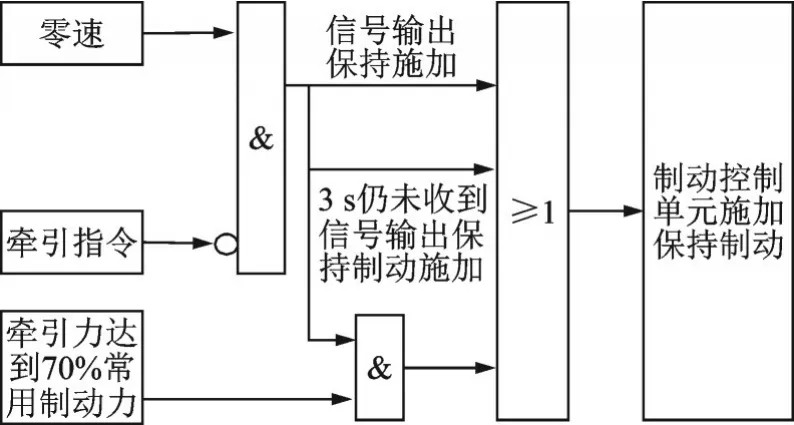
图3 ATO模式下保持制动施加控制逻辑Fig.3 Holding brake control logic in ATO mode
2.1.2 人工驾驶模式下保持制动施加
当车载ATP处于切除状态列车处于人工驾驶模式时,制动控制单元检测到列车处于零速状态且此时列车施控器没有发出牵引指令,制动控制单元自行施加保持制动。具体逻辑如图4所示。
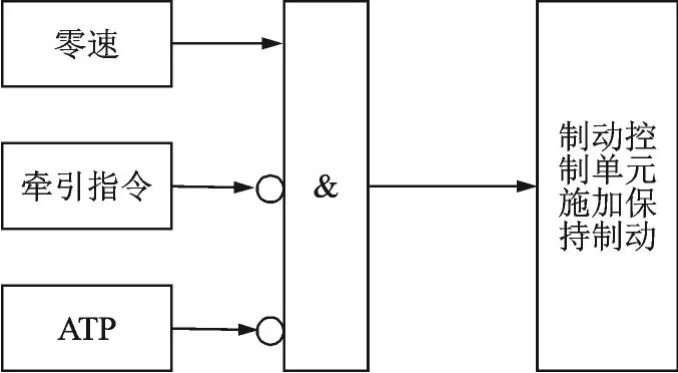
图4 人工驾驶模式下保持制动施加控制逻辑Fig.4 Holding brake control logic in manual mode
在网络正常状态下,列车的零速和牵引制动状态均通过硬线给到列车控制单元VCU,VCU基于此通过网络数据协议发送保持制动施加指令给到制动控制单元,制动控制单元收到施加指令后施加保持制动;当列车网络故障,人工操作列车进入紧急牵引或者备用模式,此时制动控制单元自行判断列车是否处于零速状态,并通过硬线判断是否有牵引指令,当此两条件都满足时自行施加保持制动。
2.2 保持制动缓解控制
列车在启动过程中,需考虑在坡道上的启动,基于第一节分析可知,当Fhold+FT>Tg+f时,即列车牵引力和保持制动力之和大于列车自身重力在坡道上的分量与阻力之和时,列车开始获得加速度,并在牵引力施加方向上动车。若列车在缓解保持制动过程中对保持制动力Fhold控制不好,导致Fhold+FT<Tg+f,抑或列车在坡道启动过程中施加牵引力不足,导致Fhold+FT<Tg+f,保持制动力与牵引力之和不足以克服列车的下滑力,导致列车发生后溜。因而对保持制动缓解策略的研究显得尤为重要,目前主流的控制策略主要可以分为以下两大类:一类是收到缓解指令后,继续等待(延时或者速度达到某个值),当条件满足后立即缓解保持制动[8];另一类是收到缓解指令后开始按一定逻辑(牵引力建立过程)开始逐步进行缓解,具体介绍如下。
2.2.1 根据列车速度进行缓解
制动控制单元对列车状态进行实时检测,当检测到列车收到来自网络或者硬线的牵引指令,并且此时没有收到网络和硬线的制动指令,允许列车先行动车,待列车速度大于1.5 km/h时,制动控制单元缓解保持制动。具体缓解逻辑如图5所示。
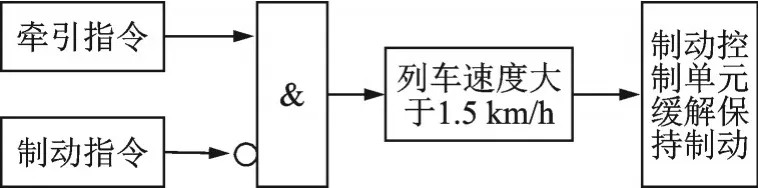
图5 保持制动缓解控制-速度Fig.5 Holding brake relief control-Speed
列车能在坡道上动车,并且能加速到1.5 km/h,表明此时列车在启动过程中牵引力与保持制动力之和已经克服了列车的重力下滑分量,列车不会发生坡道溜车,此时缓解保持制动是安全的。
2.2.2 延时缓解
列车在坡道启动过程中制动控制单元一直施加固定级位的保持制动,此时列车牵引已经建立,且牵引力在列车静止状态下持续增大,Fhold+FT>Tg+f,2 s后立即缓解保持制动,此时已经施加出来的牵引力FT>Tg+f,能够克服列车的下滑力。具体缓解逻辑如图6所示。
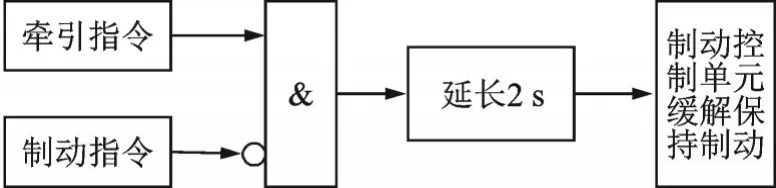
图6 保持制动缓解控制-延时Fig.6 Holding brake relief control-Delay
2.2.3 按牵引力值进行缓解
为防止保持制动在缓解过程中发生溜车,牵引系统在收到牵引命令后,经过一定时间内如1.5 s,将牵引力上升到某一固定值X,此力值足以克服列车自身重力在坡道上的下滑分量,此时保持制动开始缓解,牵引力将保持在X不变,待保持制动力完全消失后并延时一段时间(T2)后牵引力按实际需求值执行。关于保持制动缓解过程如图7所示(图中X,T1,T2均在实际调试期间确认)。
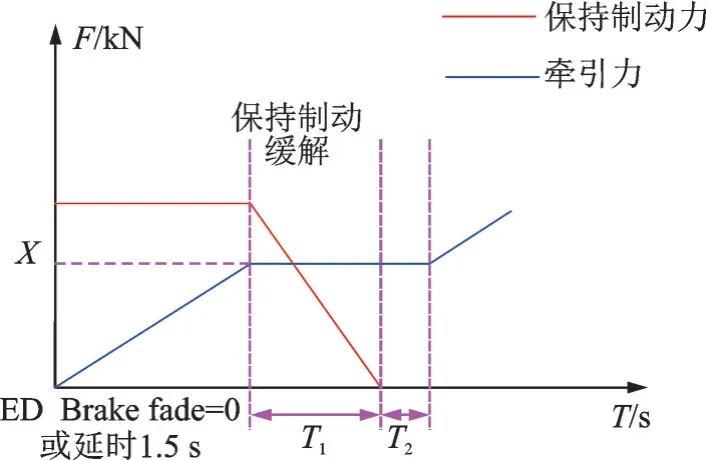
图7 保持制动缓解控制-按力值Fig.7 Holding brake relief control-Force
2.2.4 牵引制动按不同斜率进行缓解
为防止在保持制动缓解过程中,发生后溜的风险,制动系统在收到牵引命令且无制动指令后,开始以0.5 m/s3的斜率撤销保持制动力,同时牵引系统将以0.75 m/s3的斜率建立牵引力,在此过程中牵引力上升的斜率始终大于保持制动力下降的斜率,保证在撤销过程中Fhold+FT>Tg+f;当保持制动完全撤销时,FT>Tg+f,其牵引力足以克服列车自身重力在坡道上的下滑分量。其控制时序如图8所示。
2.2.5 小 结
对于以上4种保持制动的缓解策略,各有利弊,其优缺点对比如表2所示。
按速度和延时缓解策略,控制逻辑简单,效果可靠,但是在保持制动力撤出的瞬间,导致整车等效牵引力会发生突变导致列车加速度跃变,引发列车启动期间的冲动[9-10],可能会影响乘客舒适性体验。按牵引力值和按斜率缓解保持制动控制策略中,控制方案较为复杂,相关控制参数需在正线调试阶段反复试验测试以固化参数,调试周期长,其在启动过程中,由于牵引力逐步建立,而保持制动力是缓慢撤销的,此消彼长列车所获得的等效牵引力逐渐提升加速度没有跳变,车辆启动平稳,但是在人工驾驶启动初期需要手动输出较大级位牵引,以保证牵引系统输出的牵引力能够在保持制动完全退出的情况下足以克服列车自身重力在坡道上的下滑分量。保持制动的这两类控制策略各有利弊,在实际运用过程中需根据运营习惯及车辆运用环境加以选用。
3 结束语
本文通过对ATO模式和人工驾驶模式保持制动施加控制策略,以及对按列车速度进行缓解、延时缓解、按牵引力值进行缓解、牵引制动按不同斜率进行缓解4种不同缓解控制策略进行分析研究,可以得到如下结论:
(1)无论是ATO控车还是人工驾驶其触发条件都相同,只是发出施加指令的来源不同,ATO控车下信号系统直接输出保持制动施加指令给制动控制单元,人工驾驶模式则是由VCU发送保持制动施加指令给制动控制单元或由制动控制单元自行判断施加;
(2)对于保持制动缓解控制策略而言,不同策略需根据城市运用实际情况和车辆的软硬件配置进行综合考虑。其中按不同斜率进行缓解,列车启动平稳可使乘客获得较为舒适的乘坐体验。