基于毫米波雷达的机动目标跟踪算法研究*
2023-09-29鞠夕强
鞠夕强 孟 文
(1.西南交通大学机械工程学院 成都 610031)(2.轨道交通运维技术与装备四川省重点实验室 成都 610031)
1 引言
汽车智能驾驶系统通过传感器获取周围的环境信息,通过警示或干预控制,避免危险事故的发生,使车辆的驾驶安全性更高[1]。其中,目标检测的稳定性、精准度、实时性决定了感知能力,是评价辅助驾驶系统的重要因素。
车载传感器主要分为主动式和被动式[2]两类传感器。主动式传感器如毫米波雷达、激光雷达;被动式传感器如光学摄像头。其中,毫米波雷达能够精确获取目标速度,探测距离长,对环境敏感度低等[3~4]优势,成为智能驾驶系统不可或缺的传感器。
雷达目标跟踪主要研究方向包括杂波环境下滤波优化[5~6],降低跟踪运算复杂度[7],提高雷达跟踪系统的稳定性与准确性[8~12]等。高振海[13]利用自适应卡尔曼滤波,跟踪前方目标速度与距离,取得了很好的跟踪效果。周小钧[14]JPDA 算法,避免了密集目标环境下组合爆炸问题;再利用卡尔曼滤波对目标进行跟踪。实验表明,运算速度与稳定性有明显提升。
本文针对复杂交通环境下机动目标跟踪难度大,易丢失的问题,设计适合机动目标的毫米波雷达跟踪流程:根据毫米波雷达数据特征选择适配算法,包括数据关联算法,跟踪门设置,航迹管理规则等;再选择目标跟踪算法;最后进行仿真实验验证与真实数据实验验证。
2 目标跟踪概述
2.1 目标跟踪流程
图1 为典型的目标跟踪流程,整体来看,目标跟踪过程为时域递推过程,在提供量测初始值后,各目标初始航迹即形成。此后根据量测值与航迹关联结果,选择更新已建立的航迹,新建航迹或删除航迹。
2.2 卡尔曼滤波算法
卡尔曼滤波是一种针对离散系统的线性滤波算法。该算法具有递推性,只需要前一时刻的估计值、估计误差协方差和这一时刻的量测值,就可以根据状态方程计算出当前的估计信号。算法计算量小,具有较强实时性[15]。卡尔曼滤波主要有以下五个公式。
前一帧预测值和预测误差协方差矩阵为
其中x̂k-1|k-1为上一帧的状态估计值,Pk-1|k-1为上一帧状态估计误差协方差矩阵,x͂k|k-1=xk-x̂k|k-1是前一帧预测误差,Fk-1为系统状态转移矩阵,Γk-1为噪声矩阵。
获取本帧量测值zk后,更新目标估计值和相应的估计误差的协方差阵:
其中x͂k|k=xk-x̂k|k为滤波误差,Hk为量测矩阵,Kk为k时刻的Kalman增益阵,由下式得出:
以上完成单目标单帧卡尔曼滤波运算过程。
2.3 IMM算法
交互式多模型算法是一种混合系统状态估计的自适应次优算法[16]。主要解决基本卡尔曼滤波算法无法适应的机动场景。IMM 算法不同模型交互服从已知转移概率马尔可夫(Markov)链[17],Markov矩阵为
式中,为模型i到模型j的转移概率,通常都是先验给定的。IMM算法步骤如下。
1)输入交互。由上一时刻每个模型状态估计、和上一时刻每个滤波器概率得到模型j的混合估计为
其中,为模型i到模型j的混合概率,由下式求出:
其中,为模型i在k-1时刻的概率,为上文中的模型转移概率,为归一化常数,为
2)模型滤波。将模型混合估计,模型混合估计协方差和获得的量测向量zk输入Kalman 滤波器,更新状态估计值x̂k|k和估值误差协方差矩阵Pk|k。
3)模型概率更新。通过计算模型与目标运动状态的相似度给出各模型权重。k时刻模型i的似然函数为
其中,为量测预测残差为量测预测残差协方差矩阵,分别为
其中,为第i个滤波器状态预测值,为第i个滤波器状态预测协方差矩阵,由步骤2得出。
模型i的概率为
其中,由式(9)给出,c为归一化常数,为
4)输出交互。基于各个模型概率,就可以给出k时刻总的状态估计和状态估计误差协方差阵,为
其中,为第i个滤波器状态估计值,为第i个滤波器状态估计误差协方差阵,由步骤2)得出。
2.4 运动模型
描述系统动态特性常用的方法是状态变量法,此方法输入与输出关系使用状态转移模型和观测模型在时域内加以描述[18]。本节所介绍的运动模型就是前述的状态转移模型,主要有匀速(Constant Velocity,CV)模型、匀加速(Constant Acceleration,CA)模型。
1)匀速模型。该模型用来描述非机动目标的状态信息,从一维运动角度来看,令状态变量为x=[x,ẋ]T=[x,v]T,离散时间方程为
其中,wk是一个白噪声,T为采样周期。
2)匀加速模型。用于描述目标做匀加速运动的模型为CA 模型。从一维运动角度来看,令状态变量为x=[x,ẋ,ẍ]T=[x,v,a]T,离散时间方程为
3 基于IMM 算法的机动目标跟踪系统
毫米波雷达目标跟踪的跟踪门是基于规则的自适应跟踪门。以测试采用的ARS408-21 毫米波雷达为例,该型毫米波雷达含有两类天线:近距离天线与远距离天线。两类天线作用距离不同,测距精度不同。将雷达目标区域划分为两部分,近距离区域和远距离区域。规划区域为:近距离区域为距离雷达0.2m~65m 的区域;远距离区域为65m~250m的区域。
在两处区域采用不同跟踪门,同时同一区域也根据目标运动状态划分为不同跟踪门。定义雷达近距离精度绝对值为ρ1,雷达远距离精度绝对值为ρ2,跟踪门分配如表1所示。
同一区域内跟踪门切换满足公式:
其中,为新目标连续跟踪次数,定义为新出现目标连续关联到量测值的次数;|ak|为k 时刻加速度绝对值,ak的单位为m∙s2,由连续两帧量测速度计算而来,公式为
其中,vk-1是上一帧关联量测值速度,vk-2为上上帧关联量测值速度,若某一数据缺失,则以该帧估计值速度替代,∆t为帧间隔。
可引申出和h-。定义为已跟踪目标,此前出现关联中断但未达到跟踪终止条件,后又重新关联目标的连续关联次数;h-定义为目标连续未关联到量测值的次数。
目标关联使用最近邻关联算法,最近邻关联运算量小、实时性好,便于工程应用。
跟踪起始与终止选用基于规则的目标生命周期管理。跟踪目标建立无需规则,即所有成功关联的目标均进行跟踪。但新跟踪目标估计值输出需满足>3,即目标连续成功关联3 次才能将跟踪结果输出给其他模块。跟踪目标终止需满足h->4,即雷达目标连续5 帧未关联到量测值,则跟踪目标终止。
前文已经说明IMM 算法能更好地适应目标机动场景,故本文滤波采用IMM 滤波算法,模型数为2,分别为CA模型与CV模型,对应目标的匀速和匀加速运动。
以上完成雷达机动目标跟踪算法选择与设计。
4 实验验证
4.1 IMM算法性能仿真实验
本文选择KF 算法作为对比算法,验证IMM 算法有效性,目标先进行匀速运动,再进行匀加速运动,最后再进行匀速运动。各状态初始值为
其中,*表示上一状态结束值。
仿真轨迹图、IMM 算法估计轨迹、KF 算法估计轨迹如图2 所示,IMM 算法各模型概率统计如图3所示。根据图3可知,IMM 算法能够根据目标运动状态调整模型概率参数,可以看出主要模型(模型概率值较大)经历了由CV 到CA 再到CV 的过程。经过100 次蒙特卡洛实验统计的两算法评价量化结果如表2 所示。评价标准中,均方根误差(Root Mean Square Error,RMSE)能够反映估计值与真值之间的偏差情况;平均绝对误差(Mean Absolute Error,MAE)也可以反映估计值与真实值的偏差情况,但对异常值敏感度低。
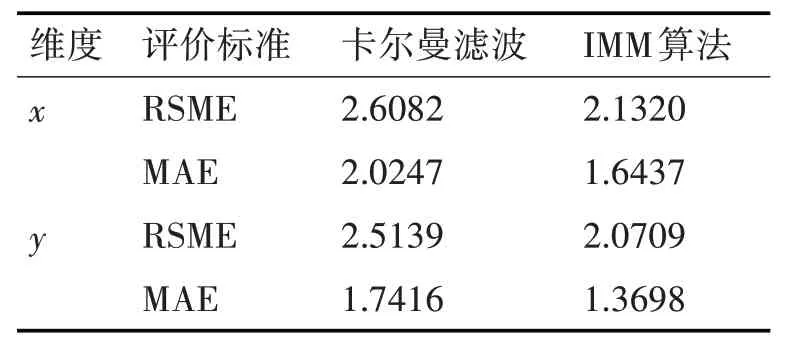
表2 算法评价量化结果
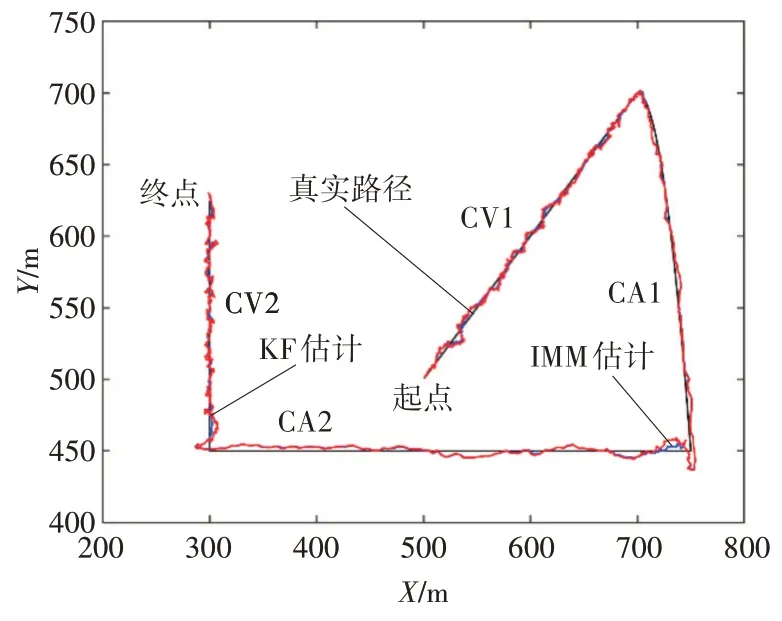
图2 目标路径与算法估计轨迹图示

图3 IMM算法模型概率统计
由表2 可知,IMM 算法的MAE 和RSME 均小于卡尔曼滤波算法。在x轴维度RSME 评价标准下,IMM 算法跟踪精度提高18.26%,在y轴维度MAE 评价标准下,IMM 算法跟踪精度提高21.35%,证明IMM 算法可以更好地估计目标真实状态,适合跟踪机动目标。
4.2 实车验证
本文将ARS-408-21 毫米波雷达安装在测试车辆上进行实车验证,实验车辆测试时路况如图4所示。

图4 实验过程中实时路况图
实验采集了247帧数据,目标共587个,绝大多数为车辆目标,少数电动自行车和摩托车。实验对比了“KF 算法+固定跟踪门”和“IMM 算法+本文规定跟踪门”在目标识别准确率和目标虚警率的差异,其中固定跟踪门为圆形,跟踪半径为1.5m。统计结果如表3所示。
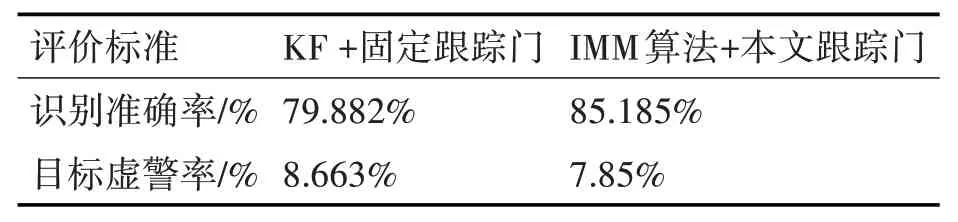
表3 目标识别统计结果
由表3 数据可知,IMM 算法+本文跟踪门可以在实际场景中更好的识别目标,减少虚警的出现。“IMM 算法+本文跟踪门”较“KF+固定跟踪门”识别准确度提高5.303%,虚警率下降0.813%,证明本文设计的跟踪流程有助于输出稳定、连续的目标状态。值得一提的是,目标准确率和虚警率与传感器硬件和信号处理方法也相关,不同硬件、不同信号处理算法,目标识别效果不同。
5 结语
为满足机动场景下目标跟踪稳定性、精确性的要求,本文根据毫米波雷达应用工况,设计了跟踪门和目标管理规则,选用IMM 算法作为本文跟踪算法,提高了目标跟踪精度与稳定性。通过实验测试与检验,证明了本文跟踪流程的有效性,具有较高的实用价值。