CZ-2C子级落区栅格舵的气动设计实践及发展展望
2023-09-27杨建民胡彦辰
杜 涛,牟 宇,杨建民,李 君,胡彦辰
(1.北京宇航系统工程研究所,北京,100076;2.中国运载火箭技术研究院,北京,100076)
0 引言
西昌、太原等多个火箭发射场地处内陆,火箭的一子级残骸将坠落在内陆地区。传统落区人口日益密集,迫切需要采取控制措施降低火箭飞行任务对落区生产和生活的影响。对火箭残骸的落区控制早期采取预测残骸散布的被动控制,当前以减少火箭残骸数量或增加可控返回的主动控制为主[1-3]。由于内陆落区不具备回收条件,因此开展现役火箭缩小落区范围研究更有现实意义。CZ-2C型号团队承担了中国首次在现役运载火箭上开展一子级落区精确控制的探索。在火箭一子级级间段增加4片栅格舵,通过舵面控制一子级下落过程,大幅度降低残骸落点的散布区域,如图1所示。

图1 火箭一子级落区控制的栅格舵方案示意Fig.1 Illustration of grid fins in the rocket first stage landing area control project
栅格舵(翼)技术起源于航空发展早期采用的多翼面组成的升力系统。20 世纪40 年代末苏联开始研究在亚声速条件下工作的可折叠栅格翼的空气动力学。栅格翼是一种新型的承力稳定面和控制面,它在许多方面表现出优于传统的单面翼的特征:a)更高的抗失速性能;b)在体积较小情况下获得较大的栅格翼总面积,可折叠,可减小上升飞行段影响;c)铰链力矩小,其转动驱动机构功率需求可以很小;d)最大刚度面与最大气动载荷作用面相重合,几乎不考虑气弹稳定性问题。
这些优点促使栅格舵技术在多个型号任务上获得应用[4],中国最早应用在CZ-2F 的逃逸飞行器上[5],用于被动增加稳定性。栅格舵这些突出的优点,非常适合应用于子级回收场景,甚至通常被看作“缺点”的阻力大,在落区控制应用上可以帮助减速,反而成为应用的优点。
在本项目上,栅格舵的功能是进行控制和机动,工作马赫数范围从亚声速扩大到高超声速的宽马赫数范围。不同于美国SpaceX公司的Falcon火箭一子级回收方案,有主发动机和姿控发动机的配合,本项目中,一子级从大气层外形进入后处于无控的自由飞行状态,需要气动舵面完成姿态稳定和起控,气动舵面操纵是姿态稳定和机动的唯一手段,如图2所示。因而栅格舵气动特性的功能在项目中更加重要,对预测的正确性有更高的依赖性,成为项目飞行成败关键事项。

图2 火箭一子级落区控制飞行流程示意Fig.2 Flight process of rocket first stage landing area control
本文介绍在CZ-2C型号开展一子级落区精确控制研制中,解决气动布局设计、试验、数值分析和建模等诸多技术难题后,完成一子级再入栅格舵控制设计工作的情况,并对一子级栅格舵控制技术未来发展进行了展望。
2 栅格舵的气动设计
栅格舵的基本功能是保障一子级再入飞行时的定性和操纵性,实现一子级再入过程的可控飞行。由于飞行包线范围宽,飞行过程复杂,在设计上除了考虑稳定和配平特性,还需要考虑铰链力矩、结构和热环境等诸多专业之间复杂和严格的限制性和约束,以及栅格舵本体格栅内部随马赫数的复杂变化规律,这些给宽马赫数栅格舵设计和应用增加了额外的困难。与此适应的设计流程与平直舵不同,包含:外流程和内流程。外流程同普通平直翼设计流程类似,以满足控制系统的要求为目标,设计舵的整体尺寸和布局(例如“十”字或“X”字布局等)。宽马赫数栅格舵的特殊性导致设计外流程内还需要嵌套一个内流程设计。宽马赫数栅格舵气动设计流程如图3 所示。因为栅格舵是由独立的格子单元组合而成,格子参数变化对流动有着复杂且重要的影响。例如对格子的流动特征描述,存在多个临界马赫数,栅格内部流动将依次出现无壅塞、壅塞、激波外推、激波反射和激波无反射等复杂的流动形态。这种复杂的流动状态自然会影响到栅格舵的整体气动特性。内流程设计是研究格子内部的流动特征,以及与栅格舵气动特性之间关联性,寻找格子的合适参数,为栅格舵设计和优化提供依据。栅格舵格栅最重要的特征参数是展弦比,即格子边长同流向弦长的比值,这一参数对格栅的流动特性影响非常大[6],准确掌握该参数对格栅流动的影响规律是高质量完成设计的关键。

图3 宽马赫数栅格舵气动设计流程Fig.3 The aerodynamic design diagram for grid fins in wide flight speed range
栅格舵设计的一个重要约束来源于栅格舵操纵舵机功率的约束。通常舵机是成熟的通用化产品,根据安装空间、能源和质量确定合适的舵机型号,栅格舵舵面操纵的铰链力矩是舵机选型的重要依据。在最初的设计中,从继承性考虑,借用了成熟的CZ-2F栅格翼作用操纵舵面,气动分析结果也显示能够给出良好的稳定性和操纵性,如图4所示。然而舵面的铰链力矩分析结果显示,铰链力矩接近10 kN·m,这在工程上难以实现。随后开展了不带舵面的一子级气动特性的研究工作,作为舵面尺寸选择的依据。栅格舵首先改善一子级箭体的静稳定性,进而操纵力矩能够配平和操纵飞行攻角,如图5所示。这样设计出新的外形不但具有良好的稳定性和操纵性,同时铰链力矩还具有工程可行性。

图4 一子级采用CZ-2F栅格翼的气动特性Fig.4 Aerodynamic characteristics of first-stage with grid fin from LM-2F
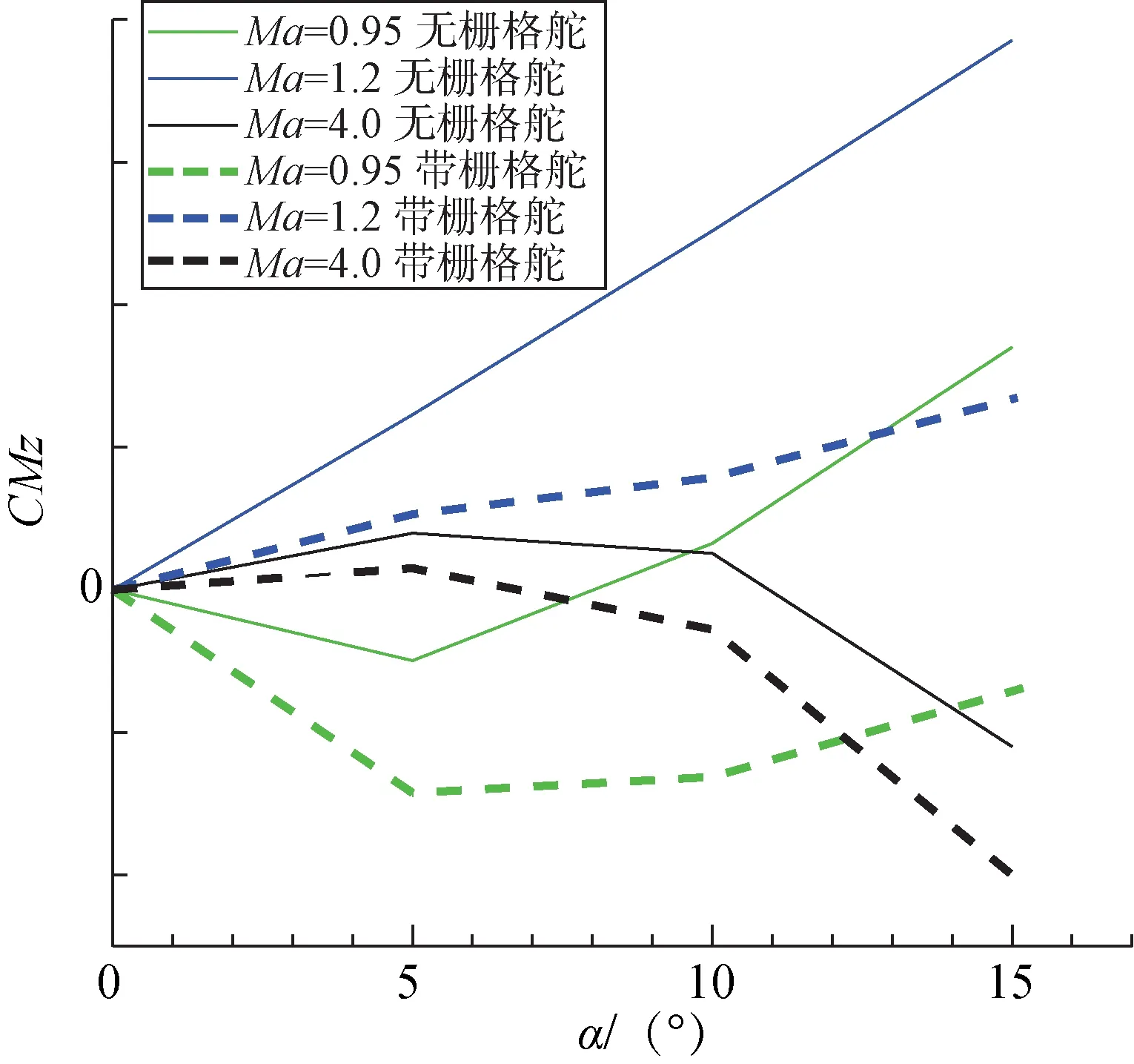
图5 单独箭体俯仰力矩与带栅格舵比较Fig.5 Pitch moment of first-stage compared with or without grid fins
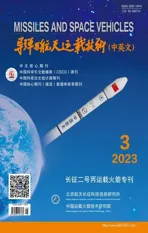
在完成栅格舵布局设计后,需要解决栅格舵气动外形同结构和工艺的协调性。气动外形只是理论外形,还需要考虑结构和工艺约束,从而变成实际可生产的外形。舵面的气动载荷是栅格舵结构需要满足的环境适应条件,结构设计的结果是栅格舵的根部变厚,以承担栅格舵承受的气动载荷和其他载荷。另外一个需要考虑的问题是气动外形同工艺的协调性。金属结构的栅格舵有焊接和铸造两种可选择的加工方式。焊接的代表是CZ-2F栅格翼[7]和CZ-4B一子级落区控制栅格舵[8]。优点是外形精度高,气动理论外形一般不需要修改就可以精确实现;缺点是成本高,生产周期较长。铸造生产效率高,金属利用率达到90%,成本低廉,非常适合于一次性使用场合,因此在本项目中采用了钛合金熔模精密铸造技术[9]。但由于格栅壁面较薄,铸造从流动性考虑,实际生产壁面会比气动理论外形厚,存在影响理论气动特性的风险。因此开展了外形变化对气动特性的影响研究,研究显示栅格框厚度增加会影响稳定性,在亚声速和跨声速段会增加抬头力矩,而在超声速段会增加低头力矩,但对操纵效率的影响可以忽略,见图6。经过控制系统评估,壁厚增加引起的气动变化对控制影响可以忽略,因此可以接受上述生产偏差,推动了铸造的应用,降低了生产成本。
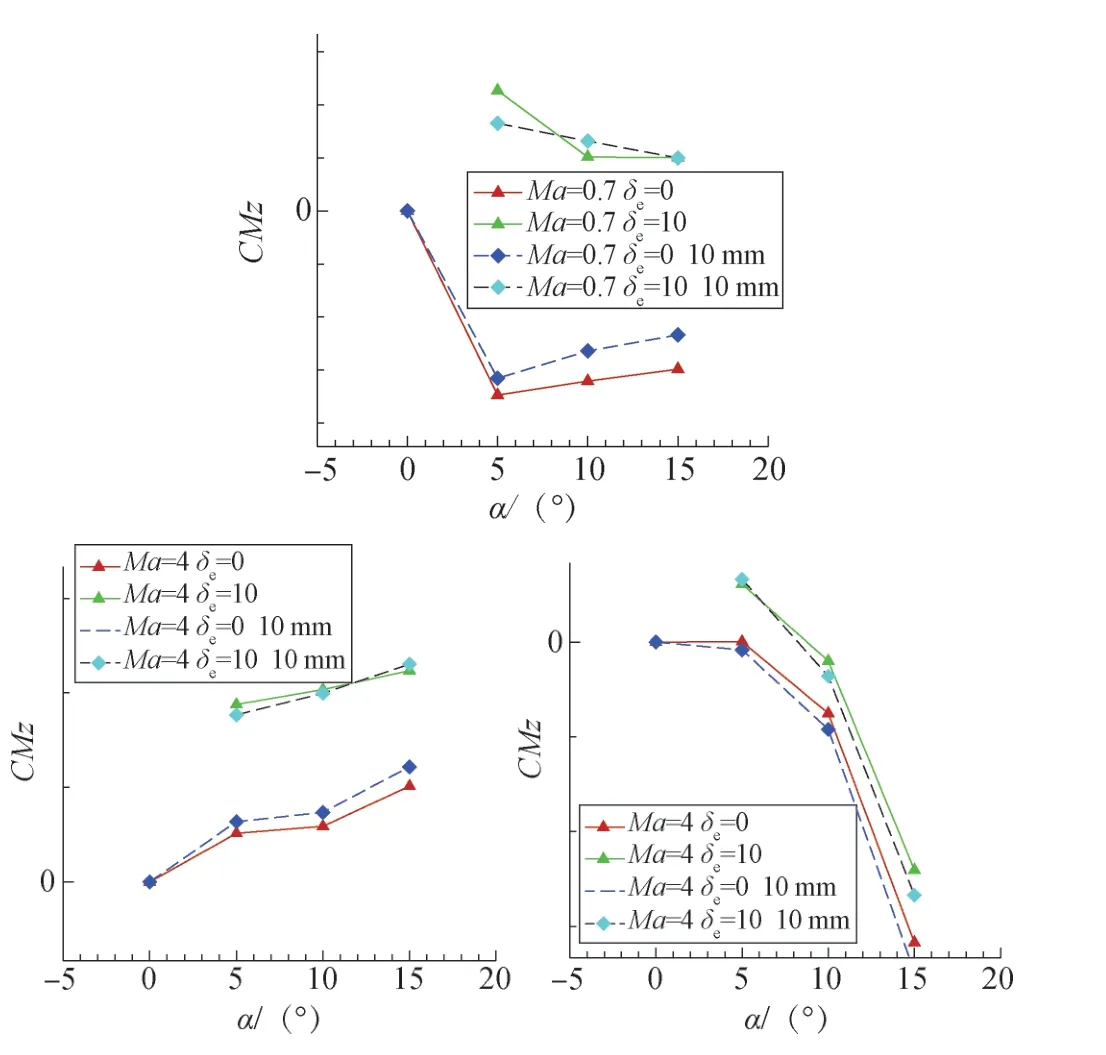
图6 格栅壁厚对配平和操纵特性的影响Fig.6 Influence of wall thickness of grid fins on maching and manipulation characteristics
最后还需要对栅格舵的外形开展热环境评估,为防热设计提供依据。这些需求之间是互相制约,甚至是矛盾的。例如减小栅格舵前缘半径,能够提高栅格舵的操纵效率,但是会恶化热环境,进而给热防护设计造成阻碍。因此设计上满足每个要求时,都需要兼顾到其他需求。经过全流程评估,最终的栅格舵气动外形见图7。

图7 栅格舵外形Fig.7 The shape of grid fin
3 气动特性的数值仿真、地面试验和气动建模
3.1 气动特性的数值仿真
在研制阶段以CFD为主开展了气动特性的计算和分析。栅格舵外形复杂,包括了多种状态和舵面偏转、翼面调整等外形的改变,如果采用结构化网格会涉及到网格的分区、嵌套和插值,同时网格调整的灵活性很差,计算模型微小的改动也会给网格生成带来极大工作量。笛卡尔网格生成方法则简单、省时。它基于飞行器表面几何造型一次性生成所需的空间网格,采用叉树结构可以很容易地实现网格的自适应加密。飞行器表面造型改动容易,可以迅速实现计算模型的变动,这使得空间网格的生成灵活性很强。本项目采用了八叉树结构的笛卡尔网格,可以整体网格整体求解,网格生成快速、质量高、加密容易。与分区网格相比,整体网格在流场计算中不需要传递网格块的流场信息,节省了计算时间。图8展示安装栅格舵的芯一级外形纵向对称面和栅格舵表面及附近箭体表面的网格。
图8 非结构笛卡尔网格分布Fig.8 Unstructured Cartesian grid distribution
3.2 气动特性的风洞试验
气动布局设计完成后,在1.2 m 的FD-12 暂冲式亚跨超声速风洞上开展了气动特性试验。栅格舵风洞试验的特殊性在于存在跨尺度缩比问题,缩比后的栅格舵格厚仅0.3 mm,采用高强度钢可满足加工要求。
3.3 气动建模
气动模型采用了增量气动模型形式,气动数据库的6个气动系数分量的气动模型计算公式如下(仅考虑静气动系数):
式中C为6个气动系数分量中的一个;Cbase为无舵偏的基础量;ΔC为增量;下标β表示侧滑角,eleven表示升降舵,aileron 表示副翼;rudder 表示方向舵。气动数据库表提供基本气动特性和各个操纵舵面操纵引起的增量。
在风洞试验中,开展了组合舵偏的操纵效率同单独舵偏效率的增量叠加比较。图9提供了俯仰舵和副翼耦合特性(图中红色方块)同单独舵偏对力矩特性影响的比较,图10 提供了方向舵和副翼耦合舵偏(图中红色方块)与单独舵偏对力矩特性的影响比较。图中显示耦合作用下,舵面操纵无交互干扰现象,可以采用无交联增量模型描述。

图9 俯仰舵和副翼耦合气动特性比较(Ma=2,Dp=10°,Dr=-5°)Fig.9 Comparison of elevator and aileron coupling aerodynamic characteristics
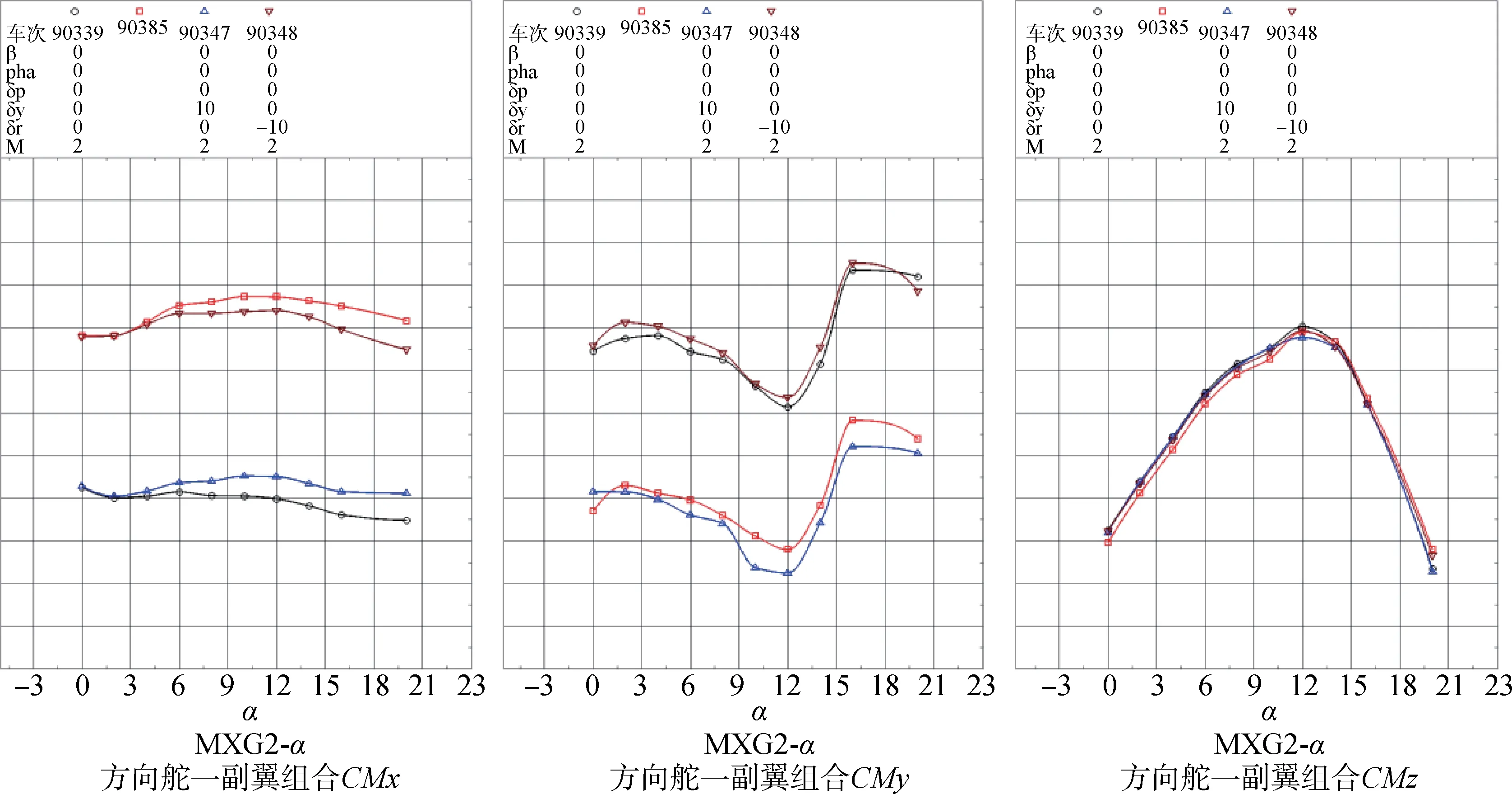
图10 方向舵和副翼耦合气动特性比较(Ma=2,Dy=10,Dr=-10)Fig.10 Comparison of rudder and aileron coupling aerodynamic characteristics
4 气动特性的人工智能预测
宽马赫数栅格舵飞行速域宽、空域广和姿态多,带来气动特性工况巨大的问题,即使不考虑耦合效应,也至少需要200个基本工况的试验车次才能满足设计需要。但受不足10个月的气动研制周期和研制经费制约,所需试验工况仅完成了一半左右。以俯仰通道气动特性为例,根据控制设计需要,马赫数每间隔1时应该开展7 个不同舵偏车次的风洞试验,仅完成了54%,见表1。尤其马赫数为4~7区间,考虑到成本和时间,几乎未开展试验。需要通过技术和方法上创新,在风洞试验数量减半情况下,在规定设计节点低成本建立高质量的完整气动数据库,保障飞行试验的成功。

表1 俯仰通道基本工况风洞试验情况Tab.1 Fundamental state for wind tunnel experiment on pitching moment
设计师队伍考虑引入机器学习方法破解试验工况不足的问题。机器学习作为目前实现人工智能的主流手段之一,是一种以已有数据(风洞试验和数值计算结果)作为输入训练出模型,然后使用模型预测未知数据的一种方法。人工智能技术应用于气动设计的概念已提出30多年[10-11],已发展出线性回归、支持向量机和神经网络等多种机器学习算法,但目前文献中并无工程应用的实例。实际应用后,显示目前主流机器学习算法在场景复杂、对象规律性差的实际工程环境应用时,预期正确性偏低,达不到工程设计苛刻的要求。图11提供了机器学习预测马赫数为3时升降舵引起俯仰力矩特性,可以看到不同舵偏曲线交叉违背基本物理特性的现象,预测完全失败。

图11 马赫数3的俯仰力矩预测结果Fig.11 Predicted pitching moment for Mach number 3 with AI
针对应用中暴露出来的问题,经过仔细分析,发现了原因:人工智能是“模仿”人脑的学习过程,但人脑学习过程是带反馈的双向机制,而目前的机器学习是单向过程,缺乏评估结果后的信息反馈。这点差异造成学习能力低下、复杂工程应用的适应性差。相应的对策就是在机器学习过程中引入反馈模式,“人在回路”(man-in-loop)反馈模式是目前最现实的选择。“人在回路”是在目前纯粹的数字化计算机智能尚不能满足工程复杂环境的条件下,一些学者提出了流程中引入“人机接口”以控制优化进程、引入判断与创新的方法[12-13]。在机器学习过程实现“人在回路”反馈的形式上开展了方法创新,确立了相关函数的物理相容性和检验物理化等4项改进措施。改进后的机器学习方法提升了预测鲁棒性与泛化能力,多维复杂工程设计数据的预测一致性提升至97%以上,达到工程应用的要求。采用改进后的机器学习方法,获得了覆盖飞行弹道的全部工况的气动特性,按时完成了任务,并实现了试验成本的节约,如图12 所示。相关研究工作的技术细节见文献[14-15]。
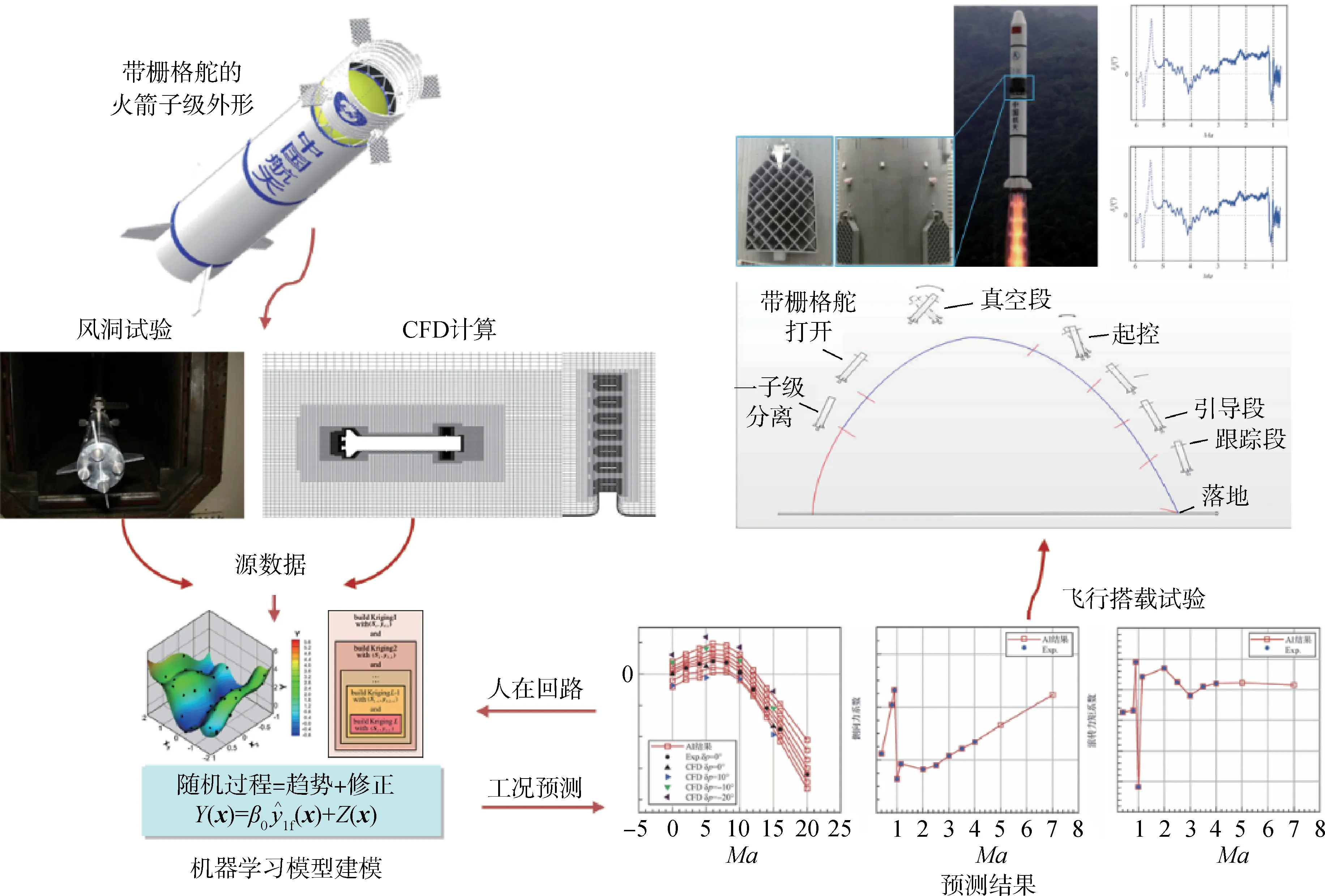
图12 人工智能气动特性预测技术在项目中应用流程Fig.12 Flow chart of the application of artificial intelligence aerodynamic characteristics prediction technology in the project
5 飞行结果
2019年7月,一子级落区控制项目开展搭载试验一子级残骸准确落入预定落区,将落区范围大幅度缩小。
图13为箭上高清摄像头图像记录了栅格舵飞行全过程,显示全程栅格舵工作情况良好。再入过程的飞行攻角和升降舵偏历程参见文献[14],符合设计预测结果。起控段气动特性无试验结果,全部由机器学习方法预测提供。全程飞行试验结果显示,一子级顺利起控,表明气动设计正确,试验、计算和人工智能方法提供的气动特性正确,保障了飞行试验的成功。

图13 高清摄像头记录飞行试验中栅格舵关闭、展开的状态Fig.13 Grid fin closing and deployment during flight test recorded with HD camera
6 展 望
飞行试验的成功证明了宽马赫数栅格舵设计正确。展望未来应用场景,还可以在以下几个方面推动宽马赫数栅格舵技术的进一步发展,以期后续在一子级落区控制和回收等方面发挥更大作用。
a)先进栅格舵气动布局研究,发展局部后掠型的栅格舵技术,克服栅格舵跨声速壅塞现象导致操纵效率低下,提升栅格舵跨声速的可操纵性[16]。
b)开展发动机超前和布局对再入气动特性的影响,深入研究跨声速的复杂流动特性和机制。
c)开展外大气层外再入大攻角飞行的静态和动态气动特性,正确预测再入初期的复杂气动特性。
d)开展全向气动特性建模方法研究,以适应控制系统对更大攻角和侧滑角气动特性描述的需求[17]。
e)进一步开展人工智能预测气动特性技术的适应性发展,让人工智能技术在气动特性预测上发挥更大作用,提高设计效率,降低设计成本[15-18]。
7 结束语
CZ-2C承担了中国首次开展的在役火箭一子级落区控制飞行演示试验,在研制过程中,气动设计团队解决了气动布局设计技术、气动特性预测技术、气动建模技术和人工智能气动特性预测技术。在较短时间内低成本高效率地完成了气动设计,支撑了飞行试验的成功。后续将在已有成果基础上,开展深入研究,以支撑未来落区控制,以及航天运输系统的重复使用技术的发展。