一种紫外与可见光图像的距离自适应配准方法
2023-09-27李浦玉陈科羽杨刘贵陈凤翔徐梁刚
李浦玉,陈科羽,杨刘贵,陈凤翔,徐梁刚
(贵州电网有限责任公司输电运行检修分公司,贵阳 550005)
近年来,随着电力系统的迅速发展,电网覆盖范围扩大,电力设备的安全稳定运行日益重要。由于电力设备大多布设在室外,不可避免地存在绝缘老化等情况,因此可能存在局部放电现象。局部放电所产生的电晕会浪费电能,进一步损耗电力设备绝缘子,干扰无线电通信等,严重影响到电力设备的安全运行[1]。因此,及时发现电力设备的电晕放电现象并确定放电位置日益迫切。
电晕放电时发出的光线包括可见光、红外线、紫外线。早期的放电检测多利用人工目视或远红外望远镜检查,而当人工目视能看到可见光信号,或远红外望远镜能检测到红外信号时,放电位置往往已严重破损且出现发热现象,且这2 种方法都容易受到太阳光照的干扰,应用效果不够理想。而太阳光线中照射到地球的紫外线波长都在280 nm 以上,280 nm 以下的区间称为日盲区[2]。电晕放电产生的紫外线有一部分波长在280 nm 以下,利用紫外相机对其进行探测,可避免太阳光的干扰。
单独的紫外相机只能探测到放电信号,不能识别具体的放电位置,利用紫外可见双光谱相机可以实现对电晕信号的发现与定位。紫外可见双光谱相机拍摄到的紫外与可见光图像需要进行配准和融合,才能清楚地看到放电信号的实际位置。图像配准方法主要包括3 类,即基于像素、基于特征及基于模型的配准方法[3],其中基于特征的配准方法计算量小、速度快、应用最为广泛,然而在紫外图像中,很难找到足够的紫外特征点与可见光特征点进行匹配。
为了实现不同拍摄距离的紫外与可见光图像的实时配准,本文提出了一种通过拍摄标定装置计算变换矩阵的配准方法,通过构建紫外与可见光图像配准参数标定系统,实现对不同拍摄距离的仿射变换矩阵的计算。再通过构建电力设备现场实时图像配准系统,实现现场图像的采集和实时图像的配准、融合与显示。
1 现有方法分析
基于特征的图像配准方法一般通过提取图像上的对应特征点,根据特征点计算2 幅图像之间的变换关系。对于紫外与可见光图像配准问题而言,由于紫外线的日盲特性,物体无法在紫外图像上成像,因此在紫外图像上很难找到足够多的与可见光图像相匹配的特征点。且如果在实时拍摄的紫外与可见光图像上先提取特征点再进行配准,便很难满足放电检测的实时性要求。
目前,国内已有很多关于紫外与可见光图像配准方法的研究。袁爽[4]设计了特殊的黑白定标板,使用Harris 角点检测法和SUSAN 角点检测法得到角点,并人工选取多组角点进行匹配,使用最小二乘法得到仿射变换矩阵。谢沈阳[5]使用十字叉丝法,用紫外成像仪对氘灯光源进行成像,采用改进的SURF 算法提取特征点,使用刚体变换模型计算变换参数。陈锦龙等[6]通过标定装置,实现了高精度、小计算量的紫外与可见光图像配准。侯思祖等[7]通过计算紫外与可见光图像的互信息作为相似性测度,采用刚体变换模型和1+1 进化算法求取最优空间变换参数,实现图像配准。本文考虑到拍摄距离不同的情况下,紫外与可见光图像的成像大小不同,变换模型的参数也会有所不同,如都使用相同的变换模型,会导致一些情况下校准偏差较大,因此对不同的拍摄距离分别计算变换模型参数能使配准结果更准确。
2 本文方法
为了实现不同拍摄距离的紫外与可见光图像的实时配准和融合,以监测电力设备局部放电情况,本文提出了一种紫外与可见光图像的距离自适应配准方法。
2.1 紫外与可见光图像参数标定系统构建
2.1.1 系统架构及标定板设计
构建紫外与可见光参数标定系统,包括供电系统、紫外与可见光LED 标定板、紫外可见双光谱相机和激光测距仪传感器等,系统架构如图1 所示。
系统实现参数标定的流程:首先在各个固定距离使用双光谱相机对紫外与可见光LED 标定板进行拍摄,采集紫外与可见光待配准图像,然后对待配准图像进行预处理,通过轮廓检测和圆心检测得到各LED 的坐标。再根据可见光LED 的坐标计算出紫外LED 在可见光图像上的坐标,使用随机抽样一致算法(RANdom SAmple Consensus,RANSAC)[8]计算出紫外与可见光配准的最优仿射变换矩阵。最后将各距离对应的仿射变换矩阵编制成表并存储,在需要进行图像配准时,可以以查表的方式迅速得到仿射变换矩阵,从而实现紫外与可见光图像的距离自适应实时配准。
参数标定系统中,紫外与可见光LED 标定板的设计如图2 所示,使用背景板和5 行10 列LED,其中第1、3、5 行为可见光LED,第2、4 行为紫外LED。使所有LED 之间的横向和纵向间距都相等,记间距值为l。第2、4 行上的紫外LED 位于其上下2 行对应位置的2 个可见光LED 连线的中点,因此可以根据可见光图像上2 个对应的可见光LED 的坐标,计算出位于两者中点的紫外LED 的坐标,从而得到紫外与可见光图像上相匹配的特征点。

图2 紫外与可见光LED 标定板设计
2.1.2 图像采集及预处理
在各个固定距离使用双光谱相机对紫外与可见光LED 标定板进行拍摄,采集紫外与可见光待配准图像,并对待配准的紫外与可见光图像进行预处理,通过轮廓检测和圆心检测得到各LED 在图像上的坐标。
首先对紫外与可见光图像进行二值化处理,利用最大类间方差法或用人工调整的方式决定二值化的门限阈值,使图像中目标和背景的对比更为强烈,目标的轮廓更加清晰。二值化处理后,由于可能存在噪声被分为目标前景的情况,对图像再进行中值滤波处理,去除噪声的干扰。
图像的轮廓检测算法是将图像中灰度值变化较大的像素提取出来组成线条,作为图像的轮廓。使用Canny 算子进行轮廓检测,Canny 算子是一种基于二阶微分的轮廓检测算法[9],提取结果准确,不易受噪声影响。提取出轮廓后,对每个LED 的轮廓进行圆心提取,即分别提取轮廓在横、纵方向的覆盖范围的中点,得到各个LED 在图像上的坐标。
2.1.3 仿射变换矩阵的计算与制表
根据可见光LED 的坐标计算出紫外LED 在可见光图像上的坐标,使用RANSAC 算法计算紫外与可见光配准的最优仿射变换矩阵。
根据2.1.1 节所述,可以根据可见光LED 的坐标计算出紫外LED 在可见光图像上的坐标。根据紫外可见光双光谱相机的结构,待配准的紫外与可见光图像之间的变换关系可表示为一个仿射变换模型。将可见光图像作为基准图像,紫外图像作为待配准图像,仿射变换模型如式(1)所示
式中:(x,y)为紫外图像上特征点的位置,(x′,y′)为可见光图像上其对应特征点的位置。可见模型中包含6个未知数,想要对其进行求解,需要至少3 组不共线的对应特征点。通过拍摄标定装置,可以得到20 组对应特征点。
使用RANSAC 算法,可以利用多组对应特征点拟合出最优的变换模型。RANSAC 算法通过抽取数据集中的随机子集,并反复迭代多次来拟合最优模型,算法将输入数据分为局内点和局外点,局内点即可以用模型拟合的数据,局外点为不能适应模型的数据,可能由过大的测量误差所致。RANSAC 算法的运行步骤如下。
1)随机抽取3 组不共线的对应特征点作为局内点,并以此拟合出仿射变换模型。
2)用得到的模型对其他数据进行测试,计算其他数据与模型的投影误差,若误差小于阈值,则将数据加入局内点,最后根据全部局内点计算模型的代价函数,如式(2)所示
3)重复前2 步的运算,如果得到的新模型的局内点数多于旧模型,或局内点数相等且代价函数值小于旧模型,则用当前模型替代旧模型。
4)重复进行多次迭代,得到的最终模型即为最优变换模型。
得到各距离对应的仿射变换矩阵后,将变换矩阵编制成表并存储,在需要进行图像配准时,可以以查表的方式得到仿射变换矩阵,从而实现紫外与可见光图像的距离自适应实时配准。
2.2 电力设备实时图像配准系统构建
2.2.1 系统架构
电力设备现场实时图像配准系统的架构如图3 所示,主要包括紫外可见双光谱相机、激光测距仪传感器等。

图3 电力设备现场实时图像配准系统架构
在电力设备放电检测现场采集放电信号的紫外与可见光图像,并用激光测距仪记录拍摄距离,再根据拍摄距离选取对应的仿射变换矩阵,实现紫外与可见光图像的配准、融合和显示。
2.2.2 图像配准与融合过程
得到激光测距仪传感器记录的拍摄距离后,通过查表的方式得到对应的仿射变换矩阵,实现紫外与可见光图像的配准。图像融合包括3 类,即像素级、特征级、决策级的融合[10],紫外与可见光图像的融合选择像素级的融合,能最大程度上保留原始图像中的细节信息。使用加权平均融合,即将紫外与可见光图像直接进行像素加权处理,用M(x,y)、N(x,y)分别表示紫外与可见光原始图像,F(x,y)表示融合后的图像,则加权平均融合如式(3)所示
式中:(x,y)表示像素的坐标;a1,a2分别表示紫外与可见光图像的权重系数。利用图像预处理中进行二值化处理时得到的紫外与可见光图像的阈值K1、K2进行融合。图像融合的步骤如下。
1)当紫外图像上的像素点M(x,y)的灰度值大于阈值K1时,表示这个像素点为目标点,则此时融合图像为M(x,y)。
2)当M(x,y)的灰度值小于阈值K1时,对N(x,y)进行判断。
3)如N(x,y)的灰度值小于阈值K2,则此时融合图像为N(x,y)。
4)如N(x,y)的灰度值大于阈值K2,则此时融合图像为a1M(x,y)+a2N(x,y),其中加权系数的选取需要人工进行调整,使融合的边缘效果较好。
最后,在工控机上显示融合后的图像,实现电力设备局部放电的实时检测。
3 实验结果与分析
对在变电站采集到的隔离开关的2 个放电信号的图像进行了配准与融合,图像融合的结果如图4 和图5 所示。

图4 隔离开关放电信号1 紫外与可见光图像融合结果
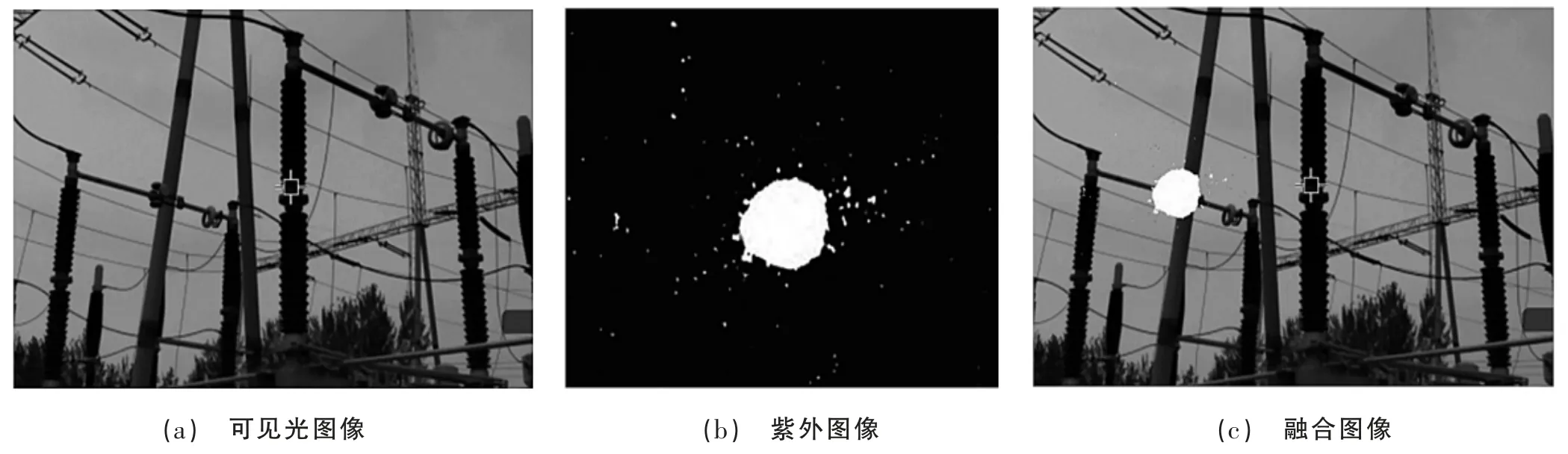
图5 隔离开关放电信号2 紫外与可见光图像融合结果
由图4 和图5 可以看出,隔离开关放电信号的紫外与可见光图像融合结果准确。本文方法可通过一次拍摄获得固定距离的紫外与可见光图像配准的仿射变换矩阵,并能够根据拍摄距离选择对应变换矩阵,实现距离自适应的图像配准,且计算量小,运行速度快,实时性强。
4 结束语
本文提出了一种紫外与可见光图像的距离自适应配准方法,通过构建紫外与可见光图像配准参数标定系统,计算出不同拍摄距离的仿射变换矩阵,迅速且准确地得到紫外与可见光图像之间的变换关系。再通过构建电力设备现场实时图像配准系统,实现了现场图像采集和实时图像配准、融合与显示,速度快,计算量小且融合结果准确,可以实现电力设备现场的实时放电检测。
