电动汽车参与电网辅助服务的控制策略综述
2023-09-25裴振坤王学梅康龙云
裴振坤,王学梅,康龙云
(华南理工大学电力学院,广东省 广州市 510640)
0 引言
近年来,中国电动汽车(electric vehicle,EV)的保有量迅速增加,至2021 年已达到912.4 万辆[1],可储存约450 GW·h 电能,巨大的储能容量使EV 成为一种新的分布式储能资源。充分利用同时具备负荷和电源双重性质的EV,合理地调配EV 进行充放电,不仅能减小EV 入网带来的负荷压力,还可以使其参与电网辅助服务,有助于解决电网频率波动、电压跌落、负荷分布不平衡等问题[2],相比于传统调节机组还具有选址灵活和环保的特点。此外,对于EV 车主,参与电网辅助服务还能为其带来额外的收入,实现用户与电网的互利共赢。
EV 参与电网辅助服务需要通过车网互动(vehicle-to-grid,V2G)技术来实现,V2G 最早于1995 年由Amory Lovins 提出,随后美国特拉华大学William Kempton 教授及其团队对其开展了进一步研究[3]。V2G 技术可以实现电能在EV 与电网之间双向流动:在电池电量不足时,EV 可以作为负载从电网获取电能;而在电池电量充足时,EV 可以作为储能单元向用电设施或电网输送电能。
现有研究表明,EV 可参与的电网辅助服务主要包括调频、无功补偿、调峰和备用4 种服务。国内外已有相应的实际工程应用出现。2018 年,日本中部电力公司与丰田株式会社合作开发了V2G 系统,验证了EV 在电网频率调节、负荷转移方面的作用[4];2020 年4 月,国家电网有限公司首次将V2G 充电桩资源纳入华北电力调峰服务市场并正式结算[5];同月,德国消纳风力发电的V2G 试点项目正式完成[6];同年6 月,菲亚特克莱斯勒公司在意大利开展全球最大V2G 试点项目,实现对电网的削峰填谷等[7]。目前,有大量文献针对EV 控制策略、优化方法和经济收益等方面进行了相关研究。文献[8]从电网侧和用户侧出发分析了EV 参与辅助服务给电网和用户带来的影响。文献[9]总结了目前V2G研究所面临的挑战,但对EV 参与电网辅助服务的控制策略讨论得不够全面。由于EV 在参与辅助服务过程中具有时空分布随机、总体可用容量随时变化、电池寿命衰减加速等特点,并且需要兼顾电网、EV、用户三者的需求,EV 控制策略比传统储能更加复杂。因此,有必要对EV 参与辅助服务的控制策略进行全面的分析和总结。EV 参与辅助服务的过程为:当调度中心确定了EV 所需提供的辅助服务后,首先需要明确EV 的响应机制与终端层控制策略,进而根据辅助服务类型选定电网层控制策略,生成相应的控制信号(如电价/激励价格、功率信号等),再交由终端层控制落实。基于此,本文将从EV 响应机制、终端层控制策略及关键技术、电网层控制策略及关键技术3 个方面对EV 参与辅助服务的控制策略研究进行综述,并对现有技术面临的挑战以及未来的发展趋势和潜在的研究热点进行了探讨和预测。
1 EV 响应机制
EV 响应机制指EV 根据调度中心发布的价格或者激励信号调整其用电行为,改变其电能需求。EV 响应机制是制定电网层控制策略的基础,本文从响应方式和响应时间尺度及对应的辅助服务两方面对其进行总结。
1.1 响应方式
EV 的时间和空间分布受用户行为影响很大,在调度其参与辅助服务时需要采取一定的响应方式促使用户响应电网需求,包括价格型响应方式和激励型响应方式。
1.1.1 价格型响应
价格型响应通过调整电价(分时电价、实时电价等)间接引导用户在电价高时减少EV 充电负荷,在电价低时增加EV 充电负荷。价格型响应难以保证响应速度和EV 参与的数量,适用于调节时间尺度较长、大规模EV 参与的服务,如调峰、无功调压等。文献[10]基于合作博弈思想,提出分时电价的动态优化模型,能有效提高聚合商和用户的联合收益,减小负荷峰谷差,但该文献未考虑用户响应电价的不确定性。考虑用户充电行为,文献[11]提出分时电价与积分制结合的响应方式,可以有效地引导用户参与改善总体负荷曲线。然而,分时电价容易造成负荷低谷涌入大量EV 形成新的负荷高峰问题。基于此,文献[12]根据EV 入网数量动态调整电价,可以有效避免负荷新高峰。文献[13]提出基于分时电价与实时电价双重电价机制的两阶段EV 优化调度策略,可以充分利用不同停车时长EV 的调度潜力。文献[14]根据系统无功负荷预测值制定动态分时电价,以减小EV 接入电网节点的电压偏差。
1.1.2 激励型响应
激励型响应需要用户提前与调度中心签订协议,通过经济补偿方式来激励用户参与辅助服务,一般由调度中心决定是否实施。该响应方式下调度中心对EV 的控制程度高,调节实时性好,可以适用于调频、无功调压、调峰、备用等几乎所有类型的辅助服务,并在光伏[15]和区域电网[16]中也得到应用。采用激励型响应存在以下问题:一是只有签订合同的EV 参与辅助服务;二是这种响应方式仅考虑最小化调度中心的运营成本,较少考虑用户需求。文献[17]将激励合约分为充电优先和允许放电两种模式,在保证用户充电需求的前提下提供备用服务,以鼓励用户参与。文献[18]基于激励型响应机制,提出了空调负荷与EV 的协同调频策略,并考虑消贾心理模型给出了激励合同的制定方法,可以有效提高用户参与度。
总的来说,价格型响应中用户对电价响应的不确定性较大,难以充分利用EV 的潜力。相比之下,激励型响应与用户签订协议,不确定性较小,但难以覆盖所有EV。基于此,文献[19]建立了基于分时电价的有序充电模型和基于激励的充放电调度模型,利用激励协议充分调用EV 的响应潜力,不愿签订协议的用户可以通过分时电价的方式响应电网调度。
1.2 响应时间尺度及对应的辅助服务
不同类型的辅助服务需要控制EV 响应不同时间尺度的功率控制信号,主要分为实时、分钟级、小时级响应,明确辅助服务及其所需的EV 响应时间尺度才能有针对性地制定控制策略。
1.2.1 实时响应
实时响应的EV 能够快速地为电网提供所需功率,但长时间响应功率控制会影响用户的出行需求,因此常用来参与电网调频服务[20]。相对于调峰、备用等服务,调频服务需要EV 有较高的充放电状态转换频率,但调频对能量的需求较小,充入或放出的能量很快能相互抵消,因而对EV 电量的要求较低。文献[21]设计了EV 与传统机组协调的调频策略,由EV 承担调频信号的高频部分,可以提高电网整体调节速率和调节精度,但未考虑EV 的充电需求。基于此,文献[22]根据频率偏差、EV 电池荷电状态(state of charge,SOC)和停留时间设计调频策略,可以兼顾调频和提升EV 电量的需求。
1.2.2 分钟级响应
分钟级响应通常可以维持发电侧和负荷侧的功率供需平衡,从而提高系统的稳定性,常用于电压调整、消纳新能源出力等。文献[23]提出EV 参与电网节点电压调整的控制策略,通过控制无功功率输出实现电压调节,对EV 电池寿命和电量影响较小。文献[24]利用EV 的可调度特性和储能特性,通过动态分时电价机制调用EV 参与消纳风电出力,考虑了用户用电成本,但电价对用户参与度的影响未具体分析。
1.2.3 小时级响应
小时级响应对EV 的响应速度要求较低,但需要EV 在每次控制中能够长时间地维持功率输出或输入,常用于改变功率曲线分布的辅助服务,例如,调峰、备用等,对EV 所提供的总体能量需求较高[25]。文献[26]根据EV 负荷运行特性将EV 进行分类,以调峰成本最小和负荷峰谷差最小为目标对调峰电价进行两阶段优化,该文献考虑了多种EV类型,且充分考虑了用户充电需求。文献[27]构建了EV 提供备用的多市场协同调度策略,考虑了能量市场价格、光伏出力波动等因素对调度策略的影响,但并未对用户响应行为的影响进行讨论。
2 终端层控制策略及关键技术
终端层控制负责执行电网层提供的控制信号,控制对象为EV 个体或集群,终端层控制策略是在EV 侧落实电网层控制策略的手段。本章将从控制框架、控制模式和关键技术3 个方面介绍EV 终端层控制策略及关键技术,如图1 所示。

图1 终端层控制策略及关键技术Fig.1 Control strategies and key technologies of terminal layer
2.1 控制框架
1)分散式控制框架
随着人们对EV 的接受,随机、分散接入电网的小容量私家EV 及商务用车越来越多,此类EV 达到足够数量也可以参与辅助服务[11]。分散式控制将此类EV 通过智能充电设施与电网相连,如图2(a)所示,EV 根据提前设定的控制策略直接、自治地参与辅助服务。分散式控制的一个特点是无须统一调度和预测EV 可调度容量,建设成本低,多适用于无法集中管理、需要EV 即插即用的应用场景,如社区配电网、微电网的调频、调压场景[28]。分散式控制的另一个特点是决策过程在本地进行,因而可以根据车辆和用户的需求灵活调整控制策略,提高用户响应度,并且对通信和计算能力的要求较低,只需充电设施与电网检测设备通信获取电网信息,与EV通信获取其实时状态,便可决策EV 所需的充放电功率。文献[29]设计了自适应下垂控制策略,结合EV 电量调节一次调频功率。文献[30]设计虚拟同步机分散控制策略,结合EV 电池SOC 进行频率和电压调节。文献[31]设计分散模糊控制器,根据用户充电需求来提供一、二次调频,但分散式控制的效果受用户行为和检测设备的影响较大,控制可靠性、精度较低,且难以保证整体最优。
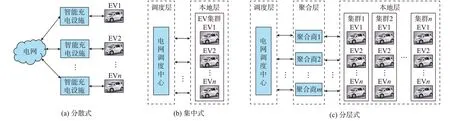
图2 终端层控制框架Fig.2 Control framework of terminal layer
2)集中式控制框架
集中式控制将区域内的EV 通过一定形式聚集,由调度中心统一管理,如图2(b)所示。电网调度中心与每辆EV 通信,统计各EV 的状态信息,根据EV 可调度容量和电网负荷信息经过优化计算得到控制信号,并直接发送给EV 集群。集中式控制的特点是控制精度很高,相对于分散式控制,可以实现全局最优。但集中式控制的难点是对系统的双向通信能力和信息存储能力要求较高,当应用于大规模EV 区域时,需要建设大量的通信通道并且调度中心的计算压力较大。基于此,文献[32]提出一种半托管式的用户响应方式,可以简化用户响应电网调度信号的过程。文献[33]基于集中式框架,提出两阶段有功无功混合控制方法,简化了充电能量优化调度和无功优化问题的复杂度,可以减小控制算法的计算难度。
3)分层式控制框架
分层式控制综合了集中式控制和分散式控制的特征,在调度层和本地层之间增加了聚合层[34],如图2(c)所示。聚合层由聚合商组成,EV 聚合商是电网和EV 之间的接口,其从EV 处获取所需信息,如充电需求、充电状态等,也将电价和充电站地址等信息传送给EV。聚合层分担了电网的EV 数据统计、可调度容量评估以及EV 功率分配的任务,能够降低电网压力,并对分散的EV 进行统一且灵活的管理调度。调度层只需与聚合层通信,接收其上报的EV 可调度容量,并结合电网信息优化计算各集群的功率控制信号[35],因而相对于集中式控制,分层式控制对通信能力和优化计算能力的要求较低,在目前EV 参与辅助服务研究中应用最多。文献[36-38]基于分层式控制建立优化模型,使系统能够实现EV 充/放电功率、充电贾用、电网调节效果等整体最优。可以看出,分层式终端控制框架在一定地理范围内都具有自治性,有去中心化的作用。未来,可以通过与邻近聚合商通信,做到聚合商间的一致性协同控制。
综上,3 种终端层控制框架的优缺点比较如表1所示。

表1 EV 不同控制框架对比Table 1 Comparison of different control frameworks for EVs
2.2 控制模式
EV 兼具负荷和储能的特性,既能作为可调负荷通过改变充电功率来维持系统发/用电平衡或削峰填谷,也能作为电源增加系统的发电能力,主动参与各项辅助服务。因此,本节将EV 控制模式分为单向充电控制和双向充放电控制。
2.2.1 单向充电控制
在双向充放电设施普及和V2G 控制系统完善之前,EV 在实际应用中主要通过单向充电控制参与辅助服务[39]。文献[40]基于动态电价机制引导用户进行有序充电,并结合电网负荷、充电贾用等调节充电功率,以提高EV 的调峰或备用服务能力。但调峰、备用服务的时间尺度较大,所需电量较多,各用户的充电需求可能相互冲突,需从主从博弈或非合作博弈的角度解决[41]。调频服务的时间尺度较短,各用户需求可以得到协调满足。为此,文献[42]在满足用户多样化充电需求的同时,提出了一种EV 集群参与日前能量市场和调频辅助服务市场的协同充电优化策略,能有效提升EV 的调频效果和经济性。
单向充电控制不涉及EV 放电,因而对系统的软、硬件设施的改进较小,便于实施,并且无须EV在充放电状态之间频繁切换,因此对电池寿命的影响较小。但EV 仅通过增减充电功率,无法充分利用EV 的储能能力。
2.2.2 双向充放电控制
双向充放电控制除了可以改变EV 的充电功率,还能够控制EV 向电网注入电能提供辅助服务,但同时也需要考虑放电带来的EV 电量损失,影响用户出行的问题。文献[31]设计了基于模糊控制的EV 充放电调频控制策略,能够满足用户的充电计划,但对SOC 处于较大/较小值的情况考虑不足,有过充、过放风险。文献[23]基于双向充放电控制设计EV 的无功调压策略,考虑了充电桩容量对有功、无功功率的限制,以保证EV 对充电功率的需求。文献[43]利用双向充放电控制设计EV 调峰策略,验证了该控制相对于有序充电控制策略有更好的调峰效果。
两种EV 控制模式的优缺点对比如表2 所示。
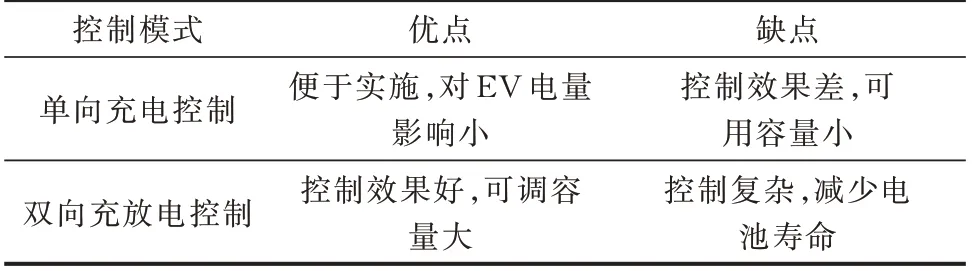
表2 EV 不同控制模式对比Table 2 Comparison of different control modes for EVs
2.3 终端层控制关键技术
终端层控制直接面对各种不同位置、不同型号、不同容量、不同SOC 和不同充电需求的EV。因此,如何将这些EV 进行分类和聚合建模,是首先要解决的关键问题。同时,结合EV 可调度容量对所需总体功率进行合理分配是终端层对EV 进行调度的重要环节。因此,可调度容量评估方法和功率分配技术也是需要关注的关键技术。本节从以下4 个方面对终端层控制关键技术展开讨论。
2.3.1 EV 集群分类方法
分层式控制框架中需要对EV 进行分群以降低控制难度,由于EV 具有时空分布随机的特点,合理的集群分类方法是控制的前提和关键。
现有研究常按照EV 的时空分布和车辆特性进行分类,如EV 与充电桩的距离[24]、EV 的负荷特性[26]、车辆类型[44]和离网时间[45]等。文献[24]将充电桩之间距离作为分类的评判标准,利用K-means聚类算法,根据充电桩的位置对EV 进行空间分类。该分类方法可以适应不同的配电网拓扑,方便多区域EV 的统一控制,但忽略了EV 的自身特性。文献[26]将EV 的负荷特性作为分类依据,根据EV 的可调用程度将其分为刚性负荷、可调度负荷、灵活性负荷和智能换电负荷,该分类方法对EV 可用容量的建模更加简单,但未考虑EV 的时间分布,依赖实时计算能力。文献[44]根据EV 车辆类型将其分为私家EV、公交EV 以及梯次利用EV,关注了不同类型EV 的行为特性、管理模式等差异对建模的影响,方便进行分时调度,但难以覆盖所有车辆类型,如共享EV、网约EV 等。文献[45]根据EV 的行驶特性,将离网时间相近的EV 编入同一集群,方便根据EV 的可调度时间调整充放电功率,可以适应用户的不同充电需求。但该分类方式的聚合商数量不固定,需要采集用户需求信息后进行再分配。
各种集群分类方法的优缺点对比如表3 所示。总的来说,EV 的时空分布以及负荷类型等都可以作为分类依据,关键在于满足哪种控制需求(对配电网拓扑的兼容性强、建模简单、适应用户需求等),需要根据需求来选择合适的分类方法。
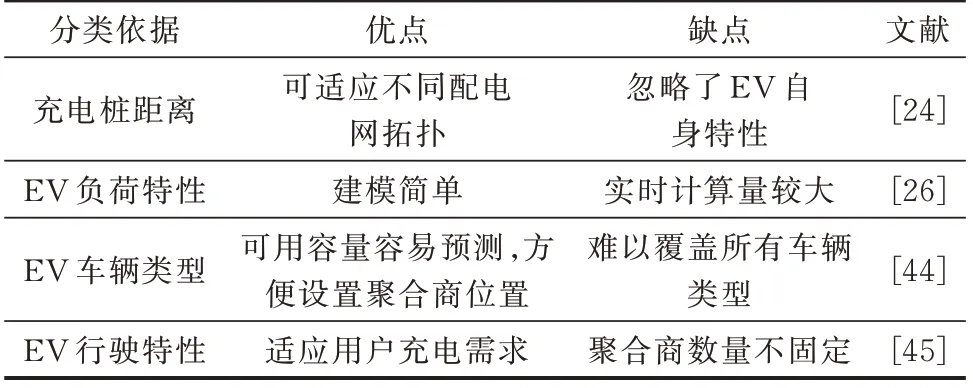
表3 不同集群分类方法对比Table 3 Comparison of different cluster classification methods
2.3.2 EV 聚合建模方法
EV 以集群方式参与电网辅助服务时,精确可靠的聚合模型是执行控制策略的基础。此外,合理的聚合模型能够直接嵌入电网调度模型中参与系统优化和控制,意义重大。
传统的EV 聚合建模方法为:先针对单辆EV 的充放电过程建模,然后进行整体聚合,并将聚合建模问题转化为规划问题,采用随机优化[46]、遗传算法[47]等智能优化算法进行求解。但对于大规模EV集群,此类建模方法的计算难度较大,精度和实时性都较差,而基于随机过程[48]和数据驱动[49-50]的建模方法可以有效解决以上问题。文献[48]考虑了EV的充电、放电和闲置3 种状态,提出一种基于马尔可夫链的EV 聚合建模方法,描述了充放电过程的动态变化。该方法能够提高建模的精确度,但过多的离散状态区间仍会增加模型的计算难度。文献[49-50]采用数据驱动的方法建立EV 聚合模型,结合大量的EV 充电行为数据挖掘其充电规律,并采用扩散核密度估计法进行概率建模,能够提升模型的计算速度。
2.3.3 可调度容量评估方法
可调度容量指EV 集群在某一时段内可用于参与辅助服务的功率,分为可上调容量和可下调容量,分别表示充电功率可减少量和增加量或者放电功率的可增加量和减少量[51]。
容量评估的重点在于准确地判断各用户是否响应电网调度和计算各种需求限制下各EV 可提供的功率值。通过采用蒙特卡洛[51-53]和排队论[54-56]等随机统计方法模拟EV 的充电时间、出行行为等来建立概率模型,可以估计各时段EV 的SOC,用以判断车辆是否能参与辅助服务,然后根据充放电功率、SOC 等约束估计总体可用容量。但概率模型中采用了大量的参数假设,实际评估精度不高。基于此,通过采用随机森林[57]和决策树[58]等机器学习算法,对车辆的行驶状态、能耗状况、驾驶行为以及补偿价格等信息进行分析,判断用户是否参与辅助服务,结合EV 充放电功率、充电时间、SOC 等估计出不同时段EV 集群的充放电容量,评估精度较高。
2.3.4 功率分配技术
功率分配是指在调度中心确定EV 集群所需提供的总功率后,对集群内EV 个体进行功率再分配的技术。功率分配不能简单地进行平均计算,关键是在能满足总体所需功率的基础上,使每辆EV 提供的功率更加合理,因此,必须结合EV 的电池状态进行计算,其中,文献[59]针对调频场景,根据各EV 的SOC 对调频功率进行加权分配。由于EV 型号不同,相同SOC 代表的电量不一定相同,文献[60]还考虑了EV 电池容量。以上方法计算简单,应用广泛,但考虑因素较少,难以保证系统整体控制效果,因而目前也有许多优化分配方法。文献[61]采用最优价值网络方法,根据不同EV 的充电时长、充电电量,对EV 的充放电功率进行优化,可以在容量受限条件下提高EV 的充电效率和应急备用能力。文献[43]根据调度中心的计划充放电功率信号,结合EV 的状态信息,以调度中心给出的功率信号与EV 实际充放电功率的方差最小为目标函数,采用粒子群优化算法求解,从而得到满足电网调峰需求的EV 最优充放电功率。
3 电网层控制策略及关键技术
电网层控制策略由调度中心或聚合商执行。目前,不同的辅助服务类型和多样的控制目标衍生出了大量电网层控制策略,本章从EV 参与的4 种辅助服务类型,即调频、无功调压、调峰、备用对其进行总结和分析。
3.1 调频策略
3.1.1 一次调频策略
一次调频策略为应对周期短、幅度小的负荷波动,要求EV 能够快速响应频率变化[62]。因此,终端层多选择分散式的控制架构。控制策略可归类为下垂控制与虚拟同步机控制。
1)下垂控制
传统储能系统参与一次调频的下垂控制特性如图3 所示。图中:Pc为充电功率;fn为额定频率;Pc,max和Pd,max分别为最大充、放电功率,由储能电池自身参数决定,死区用于防止储能单元频繁地充放电。与传统储能一次调频策略相似的是:EV 的功率由电池提供,因此,在调频过程中要考虑对电池寿命的影响。文献[22,63]考虑车辆充电需求与过充、过放问题,设置了电池SOC 的上下限SSOC,max和SSOC,min,并结合充电机自身的最大充放电功率给出了Pc,max和Pd,max的计算公式。为避免电池老化带来的SOC 计算误差影响充放电功率,文献[64]借助锂电池的老化衰减模型及时地更新电池容量,进而精确估计SOC。
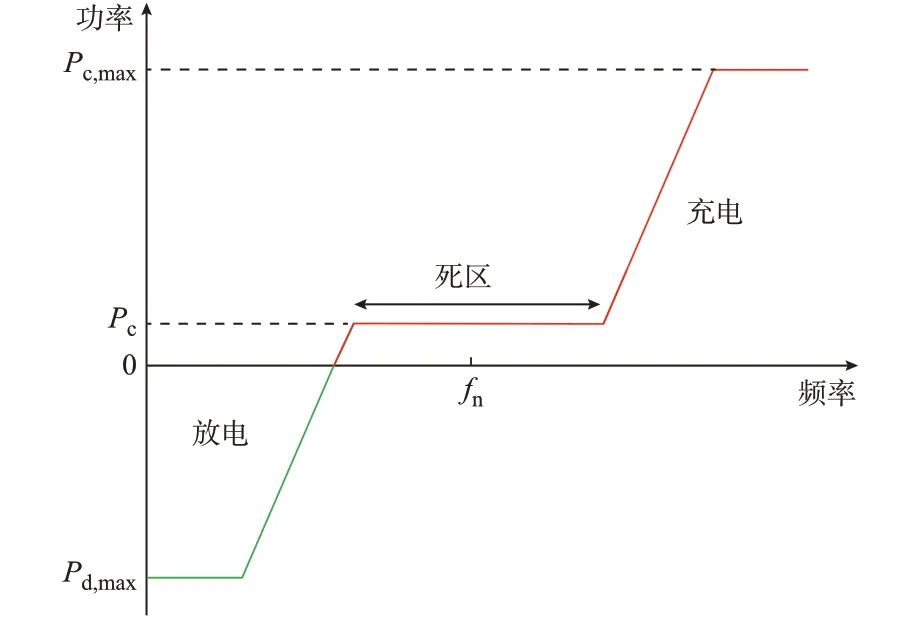
图3 传统储能参系统与一次调频的下垂特性Fig.3 Droop characteristic of traditional energy storage systems participating in primary frequency regulation
与传统储能一次调频策略不同,EV 作为交通工具参与一次调频需解决的问题是如何协调EV 的调频能力与充电需求。文献[65]采用自适应下垂系数控制,根据EV 电池SOC 改变下垂系数,如图4(a)所示,便可通过自适应改变调频功率来协调电网与用户的需求,但SOC 期望值SSOC,e无法直接调整。文献[64]采用图4(b)所示椭圆函数来构建SOC 与下垂系数K的函数关系,可迅速稳定SOC,并且SSOC,e在函数中作为参数可直接调整,能够灵活适应不同用户的充电需求。图4 中:下标1、2 表示不同用户;Kmax为下垂系数最大值。
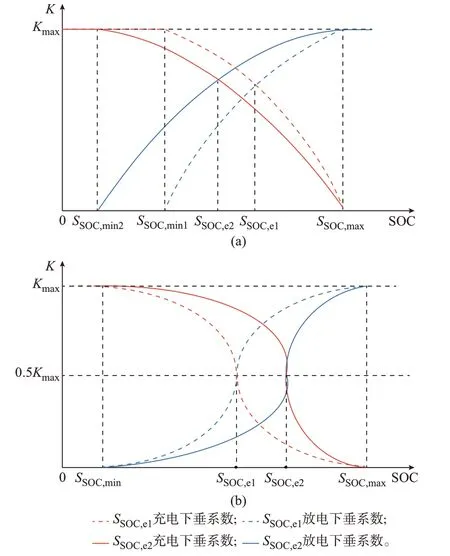
图4 自适应下垂系数Fig.4 Adaptive droop coefficients
2)虚拟同步机控制
下垂控制缺乏惯性,无法快速抑制频率的突然变化,虚拟同步机通过模拟传统电机的惯性过程,引入虚拟惯量J以增加系统稳定性[66]。该控制策略用于V2G 同样面临协调用户与电网两方需求的问题[67-68]。为此,文献[62]提出自适应虚拟惯量算法,可根据SOC 自适应地改变J,同时调频功率依然由电网频率与阻尼系数决定,对EV 的调频出力影响不大。文献[30]在虚拟同步机模型中加入模糊控制器,使充放电功率能够根据电网频率和EV 电池SOC 以及用户设定的电量限值进行调节。文献[31]根据EV 剩余可参与V2G 的时间与电网频率偏差,自适应改变一次调频功率,可以保证按时完成充电计划,当EV 数量较多时有良好的调频性能。
3.1.2 二次调频策略
对于幅度变化较大、波动时间长的负荷,一次调频无法保证频率调节的准确性,需要二次调频参与使系统频率恢复到额定值[69]。传统的二次调频通过改变发电机组调速系统的运行点,增加或减少机组有功功率来适应负荷变化[70]。EV 参与二次调频时,可将EV 集群等同于一个主调频机组,通过控制区域控制偏差(area control error,ACE)来维持系统频率稳定以及各区域交换功率的平衡,其中,ACE为系统频率偏差与区域交换功率偏差之和[20]。
二次调频所需EV 数量多,调节时间长,因此,可采用集中式或分层式的终端层控制框架,目前研究多数围绕分层式框架的优点进行讨论。以分层式控制框架为例,EV 参与二次调频的控制框架如图5所示。ACE 控制信号经比例-积分(PI)环节[20]或根据历史数据预测[70]得到功率调节信号A1,与EV 总体可调度容量A2在电网调度中心进行决策得到调频信号A3,根据各集群可调度容量大小加权分配给各EV 聚合商,各聚合商再根据各EV 电池SOC、容量大小对调频功率进行再分配。
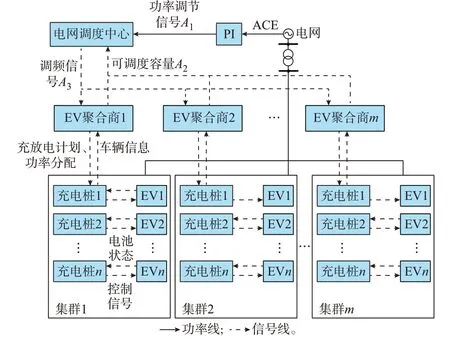
图5 EV 参与二次调频的控制框架Fig.5 Control framework of EV participating in secondary frequency regulation
为协调电网调频需求与用户充电需求,文献[71]采用模糊控制器代替PI 环节与功率加权分配环节,直接根据ACE 信号与电池SOC 来计算EV 群体所需的输出功率,满足用户对电量需求的同时可增加频率控制的稳定性。为充分利用EV 调频的快速性,文献[20]提出让EV 承担ACE 信号的高频部分,常规机组承担低频部分,可以提高调频效率。但高频的调频信号带来的充放电切换次数增加会对电池寿命造成损害。以上策略均针对已接入电网的EV 进行控制,而未考虑EV 的参与度和时空分布随机性。
3.2 无功调压策略
EV 参与电网无功调压服务能够充分体现EV时空分布随机带来的灵活调度特性,但同时也面临充电设施容量限制带来的有功、无功功率相互制约问题,以下为两种特性所对应的控制策略。由于需要统一调度多个电网节点下的EV 充放电,以下控制策略均以分层式控制框架进行讨论。
3.2.1 灵活调度策略
EV 车主的充电行为在时间和空间上具有强随机性,当EV 仅作为负荷大规模接入电网进行无序充电时,难以确定配电网何时何处的电压将会跌落,从而给传统无功补偿设备的设计带来困难。将EV作为补偿源参与无功补偿服务中进行有序充放电,不仅能大大缓解其无序充电带来的电压问题,EV的分散性、随机性的特点也使其比传统无功补偿设备更加灵活、及时。
利用EV 随机、分散接入电网的特点,协调各个节点上EV 的无功输出,可使每个节点电压都在稳定范围内。文献[72]使用沟通调节算法协调各节点电压,如图6 所示。当EV1 在PQ控制下容量不足时,配电所调取相同次级馈线下的EV2 参与无功补偿;当该馈线的容量也不足时,则调取相同初级馈线下其他次级馈线的EV3、EV4 参与调节。该控制方法对节点间的通信条件要求较高,并且逐级调用不同馈线容量的方式计算量大,全局可靠性较低。文献[38]提出一种适用于平衡/非平衡微电网的分布式模型预测控制策略,建立了考虑EV 无功补偿的电压调节模型,可以实现通信条件较差情况下的多EV 协同控制。
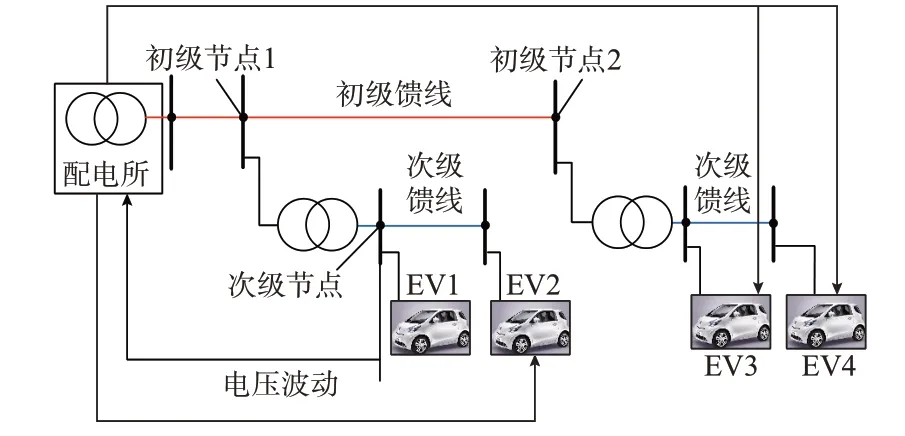
图6 沟通调节算法控制图Fig.6 Control diagram of communication regulation algorithm
3.2.2 有功、无功功率协调策略
由于充电桩容量的限制,EV 在进行充放电时,无功功率Q的增加将导致有功功率P的减少,如图7 所示,这个联动的运行过程可用第四象限运行特性表示[73]。因此,在进行V2G 无功补偿的同时必须考虑EV 的有功需求。
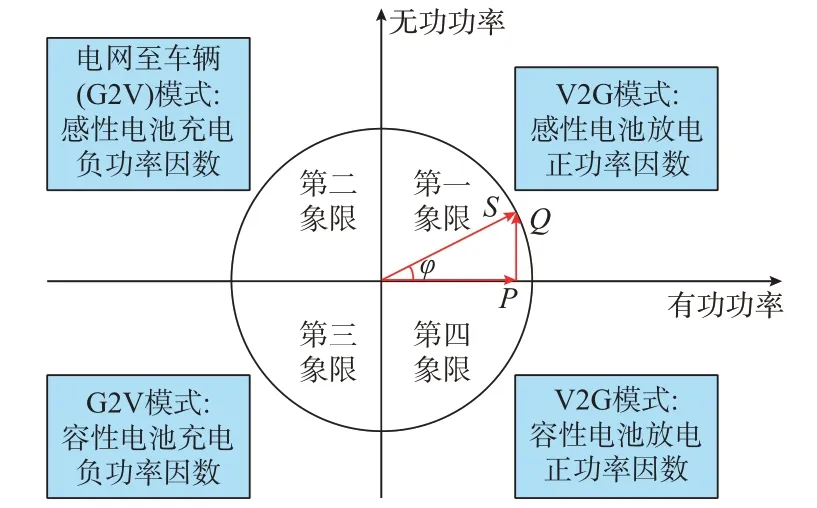
图7 EV 四象限运行特性示意图Fig.7 Schematic diagram of four-quadrant operation characteristic of EV
文献[23]根据用户目标电量、电池容量计算出充电桩功率因数角的可调控范围,以功率因数角φ为优化变量,建立以减小电压波动最小、网损最小、用户花贾贾用最少、充电结束后SOC 达到出行需求为优化目标的节点电压调控模型,并采用粒子群优化算法对该模型进行求解。文献[74]通过EV 的时空分布与SOC 的概率模型建立了以配电网运营成本最小为优化目标的日前优化模型,确定充电站日前计划有功功率;然后,根据日前优化结果和EV 实时数据,以有功功率满足日前计划、网损最小、总视在功率S最小为优化目标,建立了配电网与充电站分层协调的EV 有功和无功功率实时优化模型。文献[75]考虑EV 的行为特性,利用二次规划方法求取不同时段EV 的最优充放电功率,然后以系统网损最低为目标,利用二阶锥规划对各时段充电站的有功及无功功率进行优化。
3.3 调峰策略
调峰服务用于解决电力系统负荷日分布不均导致的负荷峰谷差较大的问题。由于电力市场发展阶段不同,国内外关于负荷调峰问题的解决方式不同[69],国外成熟的电力市场主要通过现货市场制定实时电价的方式来解决负荷日分布不均的问题,不存在单独的调峰市场[76-77],而中国电力市场尚未成熟,需通过短时电力调节使发电出力匹配负荷的变化[19]。
调峰服务的调度工作主要包括:日前优化调度、定价和日内实时功率调度[78]。以分层式控制框架的调峰策略为例,EV 参与调峰的基本流程如图8 所示。首先,调度中心根据历史负荷和EV 行为数据对负荷曲线进行预测,用于日前优化调度和电价制定;EV 聚合商实时统计EV 的状态信息并计算出总体可用容量,结合历史容量数据预测各时段用于调峰的可用容量,并上传给电网调度中心;然后,电网调度中心以负荷曲线波动最小、电力传输损耗最小等为目标对日前调度计划进行优化矫正,制定出EV 集群的计划充放电功率发送给各聚合商;最后,聚合商结合EV 的状态信息,以聚合商或用户成本最低为目标,经粒子群优化等算法优化后将所需充放电功率实时分配给各EV[43,79]。
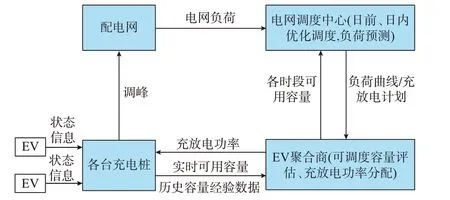
图8 EV 参与调峰控制策略Fig.8 Control strategy of EV participating in peak shaving
根据EV 的负荷特性,在调峰时既能将EV 充电负荷转移到负荷低谷时期,又能通过控制EV 馈电增强系统调峰能力,实现灵活调度。文献[26]根据EV 负荷特性,建立了刚性负荷、可调度负荷、灵活性负荷以及智能换电负荷4 种EV 负荷模型,基于该模型设计EV 参与调峰的日前定价策略与日内优化调度策略。该策略根据EV 的充放电特性评估其可调用程度,能够充分利用EV 的调峰潜力。
3.4 备用策略
备用服务用于储备足够的容量以应对电网需要,保证系统稳定运行,对控制的可靠性要求高,需要EV 的服务容量较大[80]。因此,同样以分层式的控制框架为主。利用EV 在时间和空间上灵活调度的优点,可快速调取故障地区的EV 群体提供备用服务,增强电网运行的可靠性。EV 的备用能力按调节方向可分为上备用(向电网反向放电或降低充电功率)能力和下备用(降低放电功率或增加充电功率)能力2 类。按可稳定提供一定容量的备用服务时间还可进一步细分为短时(1 h 到数小时)和长期(1 日到数日)[61]。针对EV 备用能力的评估方法,文献[81]考虑EV 的出行特性和充电计划,提出了决定EV 备用能力的2 个关键边界约束(功率边界和电量边界),结合EV 当前的运行功率便可对上、下备用能力进行定量评估。文献[82]考虑了EV 提供备用时出现的风险对备用能力的影响,并建立风险模型用于修正计算的备用容量。
文献[61]根据EV 充电计划对EV 进行有序充放电调度。首先,根据充电计划将EV 按充电时长进行分组,无法按时完成充电合约的汽车则在分组中剩余并优先参与调度;然后,结合电网负荷信息,利用最优价值网络算法对功率进行组间分配。但该策略有个前提,即用户愿意响应有序充放电调度且EV 接入电网时间较长,才能有效提高系统备用能力。文献[83]考虑单台EV 充、放电与配电变压器容量的双重约束,以调度中心收益最大化为优化目标对EV 的充放电功率进行优化,可以在市场备用价格变化时提供较大的备用容量。
3.5 电网层控制关键技术
电网层控制是EV 参与电网辅助服务的顶层控制,需要结合可参与服务的EV 容量来制定控制策略。EV 与传统储能不同,其在辅助服务中的参与度较低,并且在响应过程中具有较大的不确定性,这都会对电网层控制策略的制定产生影响。因此,提升用户参与度和应对存在的不确定性是电网层控制需要重点解决的关键技术。
3.5.1 用户参与度提升方法
EV 参与辅助服务的实际可用容量受用户参与度的影响很大,需要提高用户参与服务的主动性,才能灵活调用EV。目前,控制策略一般通过经济补偿(电价补偿[84]、激励补偿[32]、电池退化补偿[85])或满足用户需求[31]的方式来提高其参与度。
EV 参与辅助服务涉及电池向电网的放电过程,会造成电量损耗,对车主进行经济补偿是提高参与度的直接、有效的方式。根据EV 的响应机制,文献[84]针对EV 参与调峰服务,提出基于电价引导的EV 控制策略,可以有效减少用户充电贾用,同时提升调峰效果。文献[32]提出基于充、放电双重激励机制的备用服务策略,建立了充、放电激励价格与用户响应度的映射模型,可以看出用户响应度随激励价格增加而增加。聚合商合理地把控激励价格在响应阈值附近,便可以得到最优的充放电激励计划,但该策略需要统计大量用户参与数据来提高模型的精度。除了电量损耗,车主往往关心EV 参与辅助服务带来的电池退化风险。为此,文献[8]提出一种随机混合整数线性规划模型,在模型中加入EV 电池退化成本模型,并设置电池退化补偿,可以降低用户充电成本,提高用户参与度。经济补偿的关键在于确定合理的补偿价格,平衡用户和聚合商的利益,这需要在价格确定之前根据采集到的足够的用户数据来提高补偿模型的准确性。
若希望用户长时间持续为电网提供辅助服务,仅通过经济补偿的方式是不够的,必须设计控制策略使EV 在提供服务的同时不影响用户的充电、出行需求。文献[31]充分考虑用户的充电需求,根据用户期望充电时间和期望SOC 设计调频参与度因子,通过模糊控制算法决定EV 的具体调频功率,便能在满足用户需求的前提下参与调频服务,有利于增强用户的积极性。但考虑用户需求的同时也增加了控制规则的复杂程度,如何设计规则以保证各种EV 充电工况下的合理性是该类方法的重点。
3.5.2 不确定性及应对方法
EV 作为交通工具,受用户出行规律、充电习惯的影响,其时空分布和用户的响应意愿都具有较大的不确定性,从而给EV 调度和可用容量评估带来困难。
1)EV 时空分布的不确定性
EV 时空分布的不确定性带来的是EV 实时容量计算难度大、无法及时准确调度等难题。因此,需要对不确定的时空分布问题进行数学建模,从而进一步计算各时段SOC、可用容量等数据。目前,主要采用的方法为:一是建立概率模型,如文献[86]结合EV 的出行规律,采用蒙特卡洛随机模拟方法估计出EV 各时刻的SOC 情况,进而计算出EV 可用于参与调频的功率;二是建立数据驱动模型,如文献[80]采用数据驱动的分布式鲁棒机会约束来描述EV 参与调峰时空间分布的不确定性,用于充电运营商参与调峰市场的日前投标决策过程,能够适应EV 出行规律的随机性。这两种方法的准确性都需要大量的历史数据作基础,当EV 历史数据较多时,模型的精度令人满意;反之,当EV 历史数据较少时,模型精度较低。
2)用户响应的不确定性及应对方法
对EV 的任何调度都应在用户愿意响应的基础上进行,然而用户的响应行为也具有较大的不确定性,往往难以预测。因此,与EV 时空分布的不确定性类似,对该不确定性采用概率和机器学习的方法进行建模。此外,也有学者将心理学方法用在不确定性建模,如文献[87]考虑用户违约的不确定性,提出了预约-违约放电机制下的调度机制,能够降低用户行为随机性对调度的不利影响。文献[88]针对EV 用户响应电价时存在的不确定行为,提出了一种计及用户响应电价关联的EV 调峰策略,通过调整电价来增强对EV 的调控能力,也可以降低这种不确定性。
4 展望
V2G 技术的应用使EV 发挥移动储能的作用,相比传统机组参与电网调节更加灵活、环保。因此,应用V2G 技术使EV 参与电网辅助服务有望成为未来改善电网稳定性的重要措施。V2G 技术成为电力系统与电力电子学科交叉的一个新兴研究热点,但EV 参与电网辅助服务的研究仍存在以下难点。
1)多主体V2G 带来的综合优化问题。EV 与电网之间是一个多主体系统(调度中心、聚合商、EV用户等),EV 参与辅助服务决策的实施必须寻求电网需求、聚合商成本和用户需求间的平衡,本质上是多目标优化问题,需要在实时性、有效性和计算量之间进行权衡,难度较大。
2)多主体V2G 带来的多源信息融合问题。V2G 参与辅助服务涉及多主体的信息具有多源性和异构性的特点,即数据类型、数据结构和数据时序等不一致,要进行数据重构,就需要建立合理的数据融合模型和数据融合算法来解决以上问题。
3)大数据云端通信带来的数据存储、数据阻塞和控制延迟问题。EV 的时空不确定性建模需要大量历史数据进行模型训练,要消耗大量的云端存储空间。同时,EV 与云端的海量数据传输也可能出现网络阻塞和数据掉包等问题,使系统效率降低。此外,通信延时、聚合延时的存在会对控制系统的稳定性产生影响[89],随着参与V2G 的EV 数量快速增长,控制算法复杂性不断增加,带来的延时也会越来越高。
4)EV 集中充、放电带来的配电网稳定性问题。EV 参与辅助服务时,若集群中大量EV 都处于充、放电模式,集中的充、放电行为很可能会导致配电网拥塞,对于电力系统的稳定是不利的。
从以上问题可以看出,由于EV 具有随机性和波动性,V2G 参与电网辅助服务亟须解决其实时性、时延性和安全性问题。云边协同计算是近年来备受关注的一种协同计算形式,一般由云端负责大数据分析、模型训练、算法更新等任务,由边缘端负责基于本地信息的数据计算、存储和传输[90]。这种方法结合了云计算的高效率和边缘计算的低延时,因而能节省通信带宽和保护用户数据隐私,在智能电网[91-92]、智能交通[93]、电池管理[94]和物联网[95]等方面已经得到了广泛应用。基于云边协同的V2G 辅助电网服务,调度中心和EV 聚合商可以分别承担云端和边端的功能,提升电网稳定运行和智能化管理,深度助力V2G 技术的发展。未来有以下关键研究技术值得进一步探索:
1)适用于V2G 的云边协同计算框架。云边协同计算可以满足V2G 参与辅助服务的智能性和协同性,但也需要同时在计算复杂度和通信成本之间合理分配计算资源。此计算框架本质为云边协同计算任务的调度问题,调度算法需综合考虑时延、能耗、带宽成本及服务质量损失等[95]。
2)云边和边边结合的EV 时空模型。V2G 参与电网辅助服务的任务具有多样性,需要借助多种算法和多源信息才能完成。虽然云边协同使云端和边端间互补协作,但边端只与云端的交互也会使边端节点互相独立,形成数据孤岛,影响服务质量[90]。利用边边分布式协同训练等方法可以弥补只采用云边计算的不足,实现云边和边边的深度融合,获得更为可靠的EV 时空模型。
3)EV 的多样性带来的模型失配问题。由于实际中的EV 电池种类、可用容量、电池寿命、用户充/放电意愿等差别很大,相同的云边协同策略在不同的对象应用中可能存在模型失配的问题,协同计算算法的兼容性和协调性也是未来研究的一个重要方向。
5 结语
EV 渗透率正在快速增加,将给传统电力系统的稳定调节带来巨大挑战。国内外已开展大量研究将EV 用作移动储能参与辅助服务,能有效减小电网的负荷压力,提高电网运行的稳定性和经济性。由于EV 具有分布随机、可用容量变化、需兼顾用户需求等特点,其参与电网辅助服务呈现多主体和多源信息融合的问题,控制策略要比传统储能更加复杂。
本文首先从响应方式和响应时间尺度及对应的辅助服务对EV 的响应机制进行概述;接着,从控制框架、控制模式和关键技术3 个方面对终端层控制策略进行分析、对比;然后,以辅助服务类型为分类依据对电网层的控制策略进行梳理;最后,结合目前的研究现状,提出了EV 参与电网辅助服务的控制策略相关的挑战,并对未来的研究方向进行展望,使读者对该领域有一个较为全面的认识,为后续进行相关研究提供参考。
