丘陵果园自走式小型靶标跟随喷雾机设计与试验
2023-09-23李文伟江世界徐平凡马恒涛杨圣慧郑永军
李文伟 江世界 徐平凡 马恒涛 杨圣慧 郑永军,2
(1.中国农业大学工学院,北京 100083; 2.现代农业装备与设施教育部工程研究中心,北京 100083)
0 引言
果园病虫害防治是果园管护的重要环节之一。我国果园主要分布在以两广地区、陕甘地区为代表的丘陵地带,约占果园总面积的65%[1-2],受地形和种植模式制约,大型施药装备行间行走困难,病虫害防治仍以人工施药为主,劳动强度大、作业效率低、药液浪费严重,且作业人员农药中毒事故频发[3]。
为改善雾滴沉积性能、提高果园施药效率、降低劳动强度,近年来国内外学者开展了果园喷雾机精准施药研究,主要涉及风送喷雾系统的改进及靶标探测技术的优化。王杰等[4]根据Y型棚架式果树的需风特性,设计一款新式的风送喷雾机,并通过试验确定最优机具作业参数。邱威等[5]为解决施药风场难以穿透果树冠层、内膛与叶片背面药液沉积难等问题,设计一种适应于低矮果园的环流循环风送喷雾机,冠层总体叶片背面雾滴平均覆盖率提高33.7%。茹煜等[6]通过优化轴流风机风筒导叶特征及锥形多出口装置,有效解决了传统风送喷雾机风送距离短与药液浪费的问题。此外,国内学者还分别设计了果园多风机风送喷雾机[7]、3WPZ-4 型风送式葡萄喷雾机[8]、多气流协同式喷雾装置[9]等,一定程度上改善了喷雾机雾滴沉积效果,为果园喷雾机的设计提供了参考。上述研究从果园实际作业条件出发,通过改进风送喷雾系统,从而改善喷雾效果,但由于装备尺寸限制,喷雾机对复杂地形的适应性仍需要进一步提高。
靶标探测技术是精准施药技术的前提,其目的是实时探测果树冠层信息,为喷头的靶标跟随提供输入条件,目前靶标探测喷雾主要采用机器视觉法[10-11]、红外传感法[12-13]、超声波传感法[14-15]及激光传感法[16-17]等。廖启明[18]为提高果园施药作业效率和着药量,采用图像边缘检测方法识别果树果实和树叶的位置信息,以此为反馈控制施药平台进行对靶喷雾作业。肖珂等[19]利用红外测距传感器设计一种果园自动变距精准施药系统,可以根据果树特征实现喷雾距离与喷雾高度的调整。南玉龙等[20]利用超声波传感器搭建了一套植物冠层密度检测系统,实测密度与模型测量密度的最小相对误差为3.959%,为喷雾机仿形喷雾提供了输入。相比于上述3种方法,激光传感器具有检测精度高、响应速度快、稳定性好的优点,因此被广泛用于探测果树冠层高度[21]、体积[22]及密度[23]等特征。
针对传统植保无人机或地面装备施药存在果树受药不均匀、药液浪费严重,且大型地面施药装备入园难等问题,本团队提出一种地空融合立体植保作业模式[24],结合植保无人机与地面施药装备各自的优势,采用植保无人机对果树冠层上部进行施药,小型喷雾机对果树冠层中下部进行施药,提升果树全冠层的施药效果。基于地空融合立体植保作业模式与团队前期成果[25-26],设计一种丘陵果园自走式小型靶标跟随喷雾机,优化靶标跟随风送喷雾系统,集成靶标探测追踪系统与自主导航系统,实现喷雾机的自主作业,并进行果园试验,验证喷雾机的对靶喷雾性能。
1 整机结构与工作原理
1.1 整机结构
研究团队通过实地调研发现,丘陵地区果园一般呈阶梯状分布,果园片区之间存在一定的高度差,部分片区之间的转场空间较小,同时获得树龄在4年以上苹果园的实际参数:果树行间距为3.0~5.0 m,株间距为2.5~3.0 m,株高为3.5~4.0 m,主干高为0.7~0.9 m,冠径为2.0~3.0 m。
根据丘陵山区果园农艺特点和病虫害防治需求,确定丘陵果园自走式小型靶标跟随喷雾机主要由行走系统、靶标跟随风送喷雾系统、自主导航系统组成,整机结构如图1所示:选用转向半径小、通过能力强的电动履带底盘作为喷雾机移动底盘,同时为底盘供电系统配备千里增程器(GG170-1型),以提高喷雾机的续航性能;靶标跟随风送喷雾系统由轴流风机、风箱、三缸柱塞泵、药箱、双喷头联动对靶机构、立柱升降机构、靶标探测激光雷达(RPLIDAR-S1型,纵向安装,安装高度475 mm)、仰角姿态传感器(SINDT型)等组成,可根据激光雷达探测的靶标位置实时调整喷雾角度、切换单双侧喷雾模式;自主导航系统包括自主导航激光雷达(RPLIDAR-S1型,横向安装,安装高度500 mm)、车身姿态传感器(SINDT型)等,可在遥控模式与自主导航模式之间切换。喷雾机具体工作参数见表1。
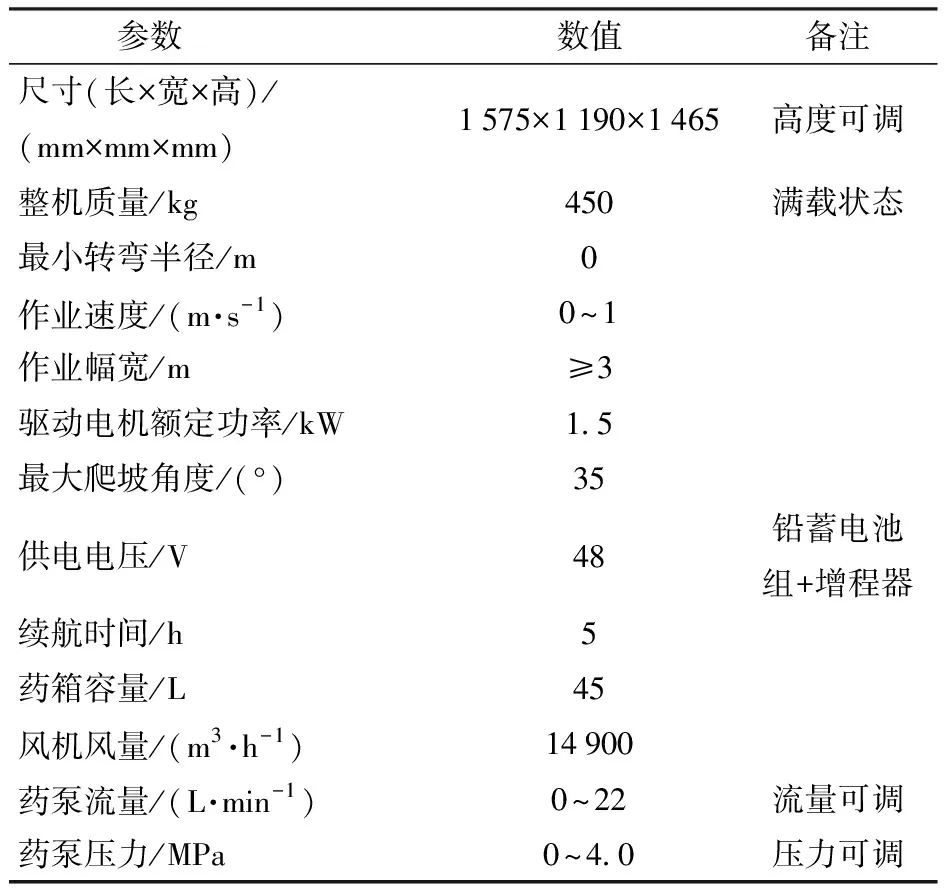
表1 丘陵果园自走式靶标跟随喷雾机主要技术参数

图1 丘陵果园自走式靶标跟随喷雾机
1.2 工作原理
为实现喷雾机果园自主作业,将本团队提出的自主导航方法[26]与靶标探测追踪方法[27]进行系统集成。图2为喷雾机果园作业示意图与控制系统框图,图2a中蓝色部分为激光雷达果园行间扫描范围,黑色圆圈为支持向量,L1、L2为支持向量机(Support vector machine,SVM)分类边际线,L3为两条边际线中心线即喷雾机导航线,黑色五角星为靶点位置,红色部分为喷雾机喷雾范围。
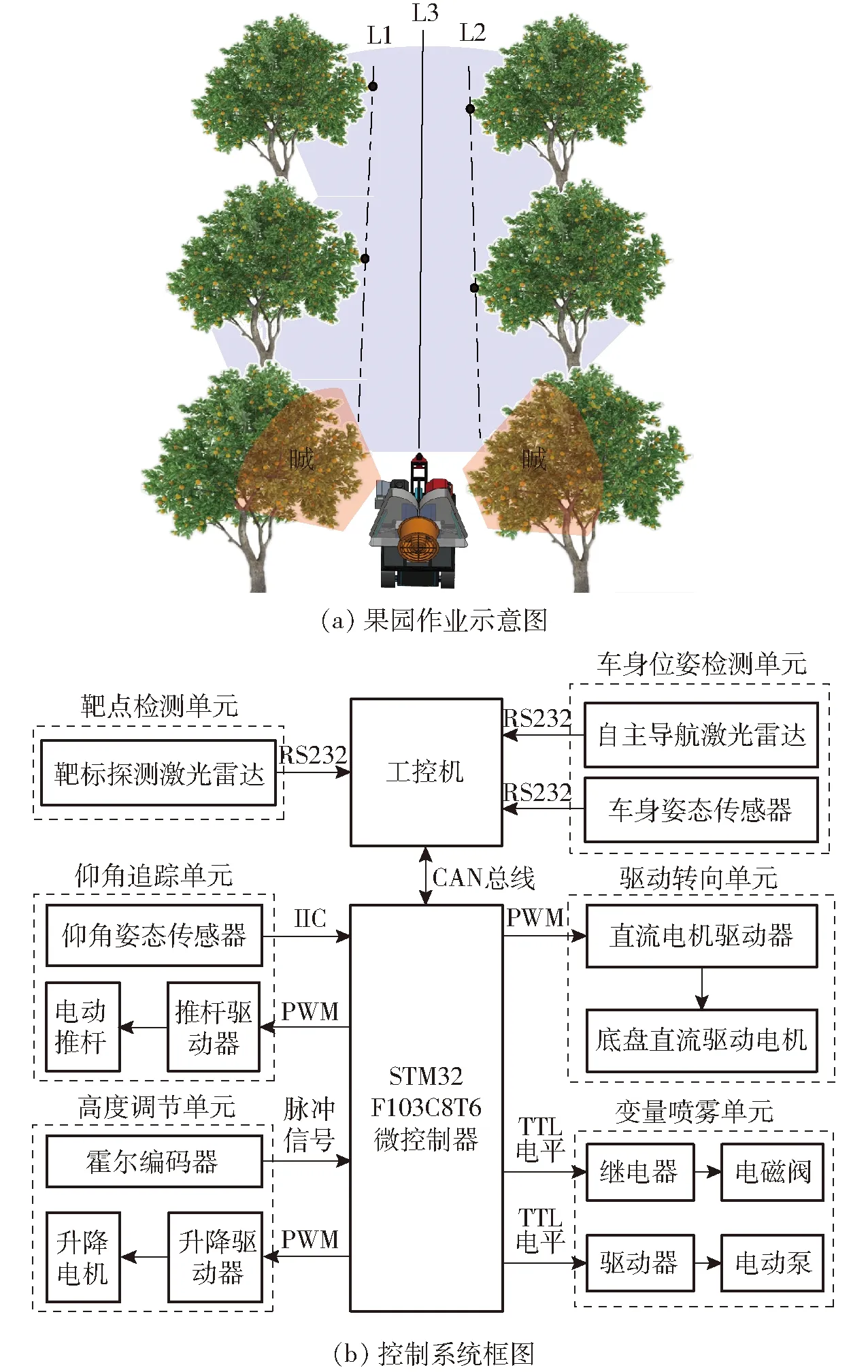
图2 自走式小型靶标跟随喷雾机工作原理图
果园喷雾作业过程中,遥控控制喷雾机驶入果树行间,切换为自主作业模式;工控机通过串口接收来自靶点检测单元与车身位姿检测单元的传感器数据,利用车身姿态传感器数据修正自主导航激光雷达获取的点云数据,采用最小二乘法(Least squares method,LSM)对果园行间点云数据进行分析、拟合,并通过支持向量机确定一条与两侧树行间隔最大化的最优分类线,以此分类线作为喷雾机行间导航路径,得到行间导航控制指令;同时对靶标探测激光雷达数据进行处理,分析果树冠层靶点位置信息,分割、滤波得到目标靶点极径、极角等信息,计算得到喷头目标仰角,并判断两侧树行有无果树靶标,得到靶标喷雾控制指令;通过CAN总线将行间导航控制指令与靶标喷雾控制指令发送至STM32单片机;单片机接收数据后,根据行间导航控制指令,输出PWM信号至底盘电机驱动器,驱动底盘直流无刷电机工作,实现喷雾机的行间自主导航;同时根据靶标喷雾控制指令,将PWM控制信号发送至电动推杆电机驱动器,驱动电动推杆实时调整喷头仰角,并利用TTL电平控制电磁阀开合与电动泵启停,实现喷雾机自主导航状态下的靶标跟随施药。
2 靶标跟随风送喷雾系统设计
为实现喷雾机靶标跟随喷雾功能,满足果树冠层中下部施药需求,设计如图3所示的靶标跟随风送喷雾系统,主要包括对靶喷雾机构与风送系统两部分。对靶喷雾机构采用双喷头联动式设计,左右两侧各安装两个喷头,整体尺寸较小,结构稳定,控制简单,可通过电动推杆改变喷雾支杆与支撑横梁的夹角,从而改变喷头喷雾角度,同时可根据果树冠层高度,利用立柱升降机构调节喷雾高度。喷头选用雾化性能与防飘移能力较好的扇形喷头,以扩大喷雾范围、防止出现漏喷现象,喷头喷雾角度为65°,等效喷孔直径1.1 mm,额定流量0.68 L/min。风送系统主要由轴流风机、风箱、导流板组成,为保证风机拥有足够的风量和风压,依据风速的末速度原则及风量的置换原则[27],本风送系统选用稳固可靠、风量大的轴流风机,其具体参数见表1,靶标跟随喷雾作业流程见图4。
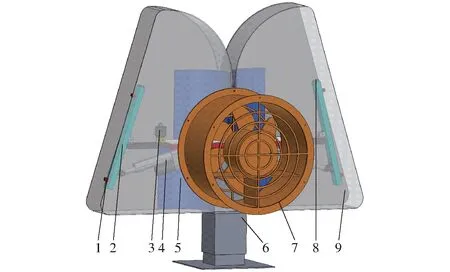
图3 靶标跟随风送喷雾系统
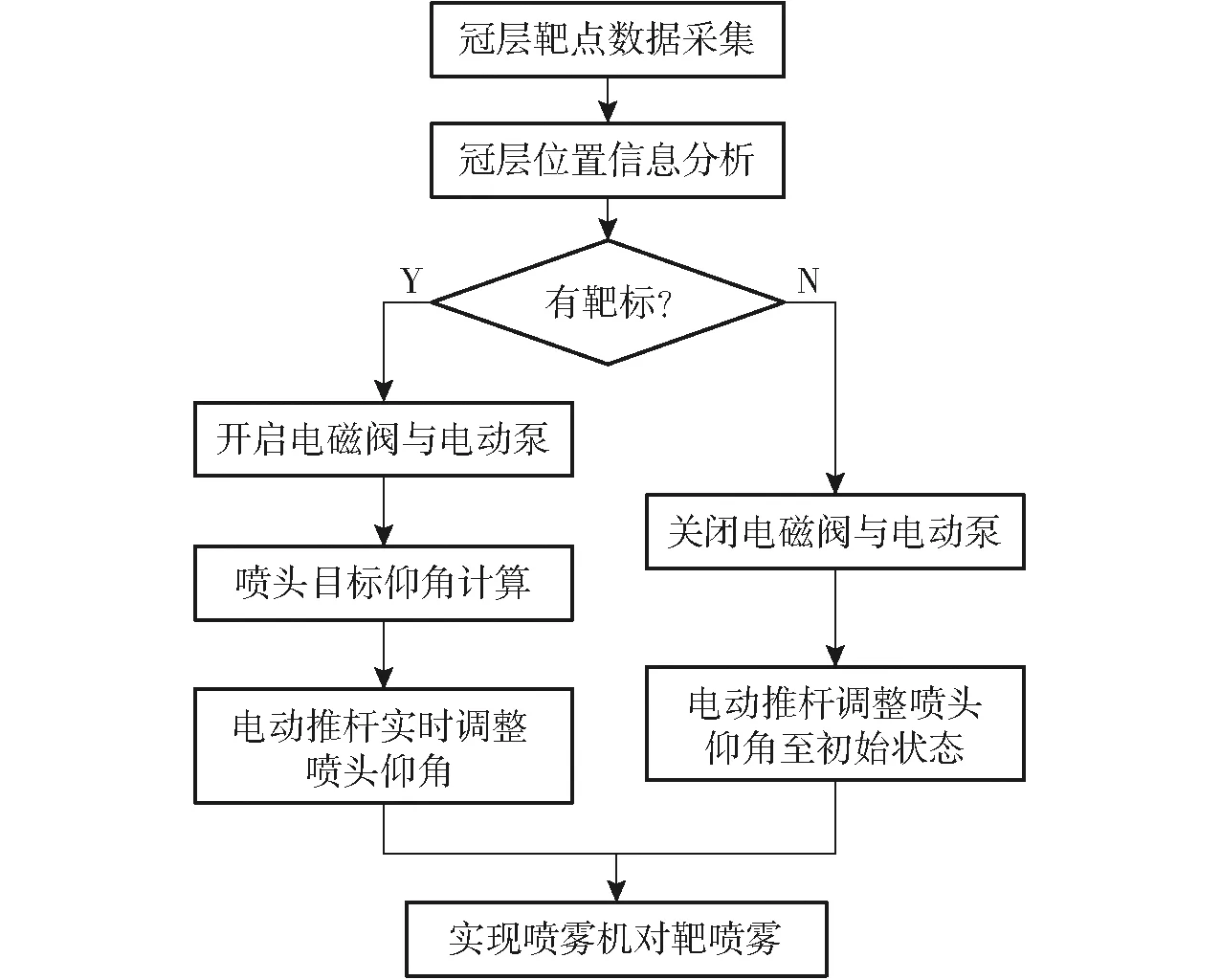
图4 靶标跟随喷雾作业流程图
图5为双喷头联动对靶机构示意图,α为喷头喷雾角度,θ1为喷雾支杆与支撑横梁的夹角。初始状态下,喷雾支杆与支撑横梁垂直,即θ1=90°,此时喷头仰角β1=90°-θ1=0°,电动推杆完全收缩,长度为L1;当电动推杆伸长至长度为L2时,推杆行程ΔL=L2-L1,喷头仰角β2=90°-θ2。本研究选择的电动推杆完全收缩时,长度L1=205 mm,最大行程为100 mm,考虑到电动推杆在受力状态下伸出至最大行程可能会卡死,故取L2≤300 mm。在前期研究基础上[26],结合余弦定理与刚体运动规律,可知喷雾仰角β2与推杆行程ΔL满足
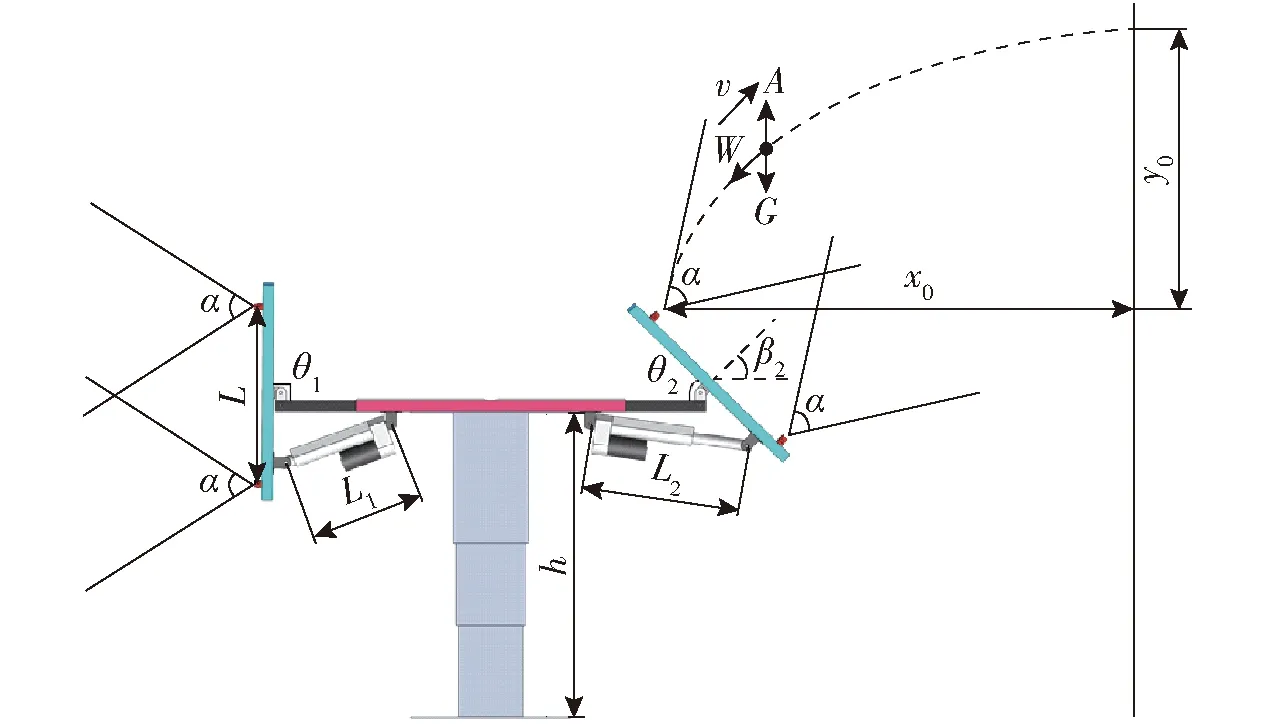
图5 双喷头联动对靶机构
(1)
当推杆行程ΔL为95 mm时,喷雾仰角β2最大,约为49.5°。
为保证在极限条件下,对靶机构喷雾范围能够覆盖果树冠层中下部,本研究在理想条件下分析雾滴的运动规律,假设雾滴在运动过程中不破碎、不变形、不蒸发,且不考虑外界风速的影响及轴流风机风场对雾滴运动的胁迫作用,雾滴只在药泵作用下获得初始速度v0。当喷头在额定流量下工作时,雾滴喷出时的初始速度v0满足
(2)
式中q——喷雾流量,L/min
D——喷头等效孔径,mm
如图5,假设当喷头仰角为β2时,黑点所示雾滴的喷雾高度最高,此时雾滴主要受阻力W、重力G和浮力A的作用,受力情况满足
(3)
G=mg
(4)
(5)
式中CW——空气阻力系数
ρg——空气密度,kg/m3
dD——雾滴直径,m
S——雾滴表面积,m2
v——雾滴速度,m/s
m——雾滴质量,kg
g——重力加速度,m/s2
根据牛顿第二定律,雾滴在x方向与y方向的运动满足
(6)
(7)
式中vx——雾滴速度v在x方向的分量,m/s
vy——雾滴速度v在y方向的分量,m/s
以雾滴喷出时的状态为初始条件,此时t=0,雾滴运动满足初始条件
vx0=v0cos(α/2+β2)
(8)
vy0=v0sin(α/2+β2)
(9)
x′=y′=0
(10)
式中vx0——雾滴初始速度v0在x方向的分量,m/s
vy0——雾滴初始速度v0在y方向的分量,m/s
x′、y′——初始位移在x和y方向的分量,m
在上述初始条件的基础上,对公式(6)、(7)进行积分运算,得到雾滴在x方向与y方向的位移分别为
(11)


(12)
其中
假设雾滴运动到最高位置时水平位移为x0,距离喷头的高度为y0,此时雾滴相对于地面的高度H为
(13)
式中h0——喷雾机底盘高度,m
h——升降机构高度,m
L——喷头安装间距,m
结合丘陵果园农艺参数,当果树株高为4 m,主干高为1 m,行距为4 m时,果树冠层与喷头的距离x0约为1.0 m。为满足果树冠层中下部施药空间需求,雾滴运动到最高位置时距离地面的高度H应大于3 m。综合上述公式,可以确定喷头安装间距L=0.4 m,升降机构最大上升高度h=0.55 m,行程为0.3 m。
3 果园试验
3.1 试验方案
为了验证样机靶标跟随喷雾(简称对靶喷雾)性能,开展对比试验,采用果园自走式小型靶标跟随喷雾机对果树冠层中下部进行喷雾作业,分别测试对靶喷雾与非对靶喷雾两种作业模式下样机的喷雾效果。试验于2022年9月在河北省保定市阜平县阜裕林果基地苹果园开展(图6),试验苹果树品种为“天红二号”,果树呈纺锤形,行距约为4.0 m,株距约2.0 m,株高约3.5 m,自然风速低于0.5 m/s,试验在环境相对干燥的时间段进行。
单侧喷雾试验方案如图7所示,对果树冠层中下部的雾滴沉积分布特性、地面流失量及冠后飘移流失量进行测试。选取3棵具有代表性的非连续果树作为测试对象,在每棵果树冠层中下部,分上、中、下3层布置水敏试纸,用于测试果树冠层雾滴沉积分布特性。如图7a所示,布样高度分别为1.8、1.2、0.6 m,每一层均分为外侧(A、B、C、D)、内侧(a、b、c、d)和主干(o) 3部分,共9个布点位置,每个布点位置放置正反2张水敏试纸,水敏试纸用回形针固定在叶片上。如图7b,在果树冠层正下方地面等间隔布置9张水敏试纸(G1~G9),果树冠层后下方地面布置6张水敏试纸(B1~B6),分别用于测试地面流失量与冠后飘移流失量,水敏试纸通过燕尾夹固定在标志杆上。冠层内部采样点A靠近喷雾侧,喷雾机从方向D驶向方向B,地面流失与冠后飘移采样点G1~G3靠近喷雾侧,喷雾机从方向G1驶向方向G3。喷雾机分别以对靶喷雾模式、非对靶喷雾模式进行喷雾试验,对靶喷雾模式下喷头仰角根据靶点信息实时调整,非对靶喷雾模式下喷头仰角固定为15°。设置喷雾机行间行驶速度为0.5 m/s,喷雾压力为0.2 MPa,试验介质为清水。

图7 采样点布置示意图
单侧喷雾试验结束后,选取1棵果树开展双侧喷雾试验,对比分析喷雾机对靶喷雾与非对靶喷雾的双侧喷雾效果,进一步验证喷雾机的对靶喷雾性能。双侧喷雾试验中,需移除冠后飘移采样点(B1~B6),喷雾机对果树两侧进行喷雾作业,其他条件与单侧喷雾试验一致。
3.2 数据处理
采用Deposit scan雾滴扫描软件对水敏试纸进行扫描,获取各采样点单位面积雾滴沉积量(μL/cm2)与单位面积沉积个数(个/cm2),数据处理时,对单侧喷雾所选取的3棵果树相同采样点水敏纸数据取平均值,并通过沉积量、沉积个数及对应的变异系数描述喷雾机作业雾滴分布均匀性。
3.3 结果与讨论
3.3.1冠层沉积分布特性分析
单位面积雾滴沉积个数能够直观反映果树叶片受药效果,因此利用叶片雾滴沉积个数对冠层雾滴沉积分布特性进行分析。分别对两种作业模式下果树冠层不同高度(0.6、1.2、1.8 m)叶片正反面采样点的雾滴沉积个数(个/cm2)取平均值,得到两种作业模式在果树冠层不同高度叶片正反面的喷雾效果,结果见图8。对靶喷雾时,果树不同高度叶片正面的平均雾滴沉积个数为46.20个/cm2,叶片背面的平均雾滴沉积个数为27.86个/cm2;非对靶喷雾时,叶片正面的平均雾滴沉积个数为54.02个/cm2,叶片背面的平均雾滴沉积个数为30.91个/cm2。

图8 两种作业模式在果树冠层不同高度叶片正反面喷雾效果
根据图8可知,对靶喷雾与非对靶喷雾时叶片正反面平均雾滴沉积个数均大于25个/cm2,满足果树冠层叶片正反面受药需求。但非对靶喷雾时,采样点上层叶片正反面的喷雾效果较差,叶片正反面平均雾滴沉积个数分别为18.81、8.27个/cm2,未满足叶片受药需求,且果树上、中、下3层叶片正面的雾滴沉积个数变异系数为56.59%,叶片背面的变异系数为73.46%,雾滴分布均匀性较差。相比于非对靶喷雾,对靶喷雾在果树冠层不同高度的雾滴分布均匀性有所提高,果树上、中、下3层叶片正面的雾滴沉积个数变异系数为34.22%,叶片背面的变异系数为48.59%,但果树叶片正面与叶片背面的施药效果仍具有一定的差异,叶片正面的平均雾滴沉积个数为叶片背面的1.66倍,叶片背面施药效果较差,存在叶片正反面受药不均匀的问题。
图9为对靶喷雾与非对靶喷雾在果树冠层不同高度采样点叶片正面雾滴沉积分布图。图9a~9c为非对靶喷雾时果树冠层不同高度叶片正面的雾滴沉积分布图,从图中可以看出,中层与下层的雾滴沉积个数明显高于上层,冠层不同高度的雾滴沉积个数变异系数达56.59%,果树冠层不同高度的雾滴分布均匀性较差;除靠近喷雾侧的点A外,果树上层其他采样点的雾滴沉积个数均小于25个/cm2,不满足叶片受药需求,且各采样点雾滴沉积个数变异系数达84.27%,雾滴分布均匀性较差;除远离喷雾侧的采样点C外,果树中层与下层其他位置雾滴沉积个数均满足叶片受药需求,但中层各采样点雾滴沉积分布差异性较大,变异系数达49.33%,部分点位存在过量施药的现象,比如点a与点D附近雾滴沉积个数超过120个/cm2;相比之下,下层的雾滴沉积分布较为均匀,变异系数为30.22%,各采样点雾滴沉积个数位于45~90个/cm2之间。通过对非对靶喷雾下的冠层雾滴沉积效果分析可知:喷雾机在非对靶喷雾模式下,喷雾角度恒定不变,喷雾范围无法根据果树冠层高度实时变化,雾滴不能完全覆盖目标冠层区域,从而导致果树冠层不同高度叶片正面雾滴沉积分布不均;此外,由于喷雾时输送至果树上层与中层的雾滴数量较少,且其中大部分雾滴直接附着在果树冠层外侧叶片上,因此存在果树上层雾滴沉积个数较少、中层雾滴沉积分布局部不均的现象。
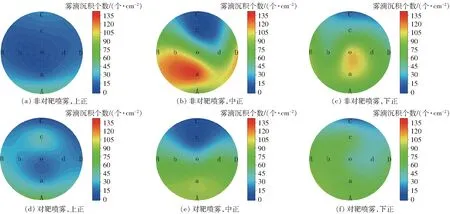
图9 果树冠层不同高度叶片正面雾滴沉积分布图
图9d~9f为对靶喷雾时果树冠层不同高度叶片正面的雾滴沉积分布图,从图中可以看出,相比于非对靶喷雾,对靶喷雾时上、中、下3层的雾滴沉积分布相对均匀,变异系数为34.22%,且未有采样点雾滴沉积个数超过100个/cm2,不存在施药过量的情况。对靶喷雾时,除远离喷雾一侧的点C附近雾滴沉积个数较少以外,果树中下层其他部位叶片正面的雾滴沉积个数均在60~90个/cm2之间,中层各采样点的雾滴沉积个数变异系数为27.28%,下层变异系数为21.43%,表明果树中下部冠层内外雾滴沉积分布较为均匀,雾滴在果树中下层冠层内部的穿透性较好;相比于中下层,对靶喷雾时上层叶片正面的雾滴沉积个数有所减少,变异系数达54.98%,雾滴分布均匀性有所降低,但除点C外,其他部位的雾滴沉积分布个数均满足25个/cm2,满足果树叶片受药需求,相比于非对靶喷雾时果树上层高达84.27%的变异系数,雾滴沉积分布均匀性有所提高。
图10为果树冠层不同高度叶片背面的雾滴沉积分布图。相比于叶片正面,非对靶喷雾时果树不同高度叶片背面的雾滴沉积个数明显减少,从图10a~10c中可以看出,果树上层的雾滴沉积效果最差,各采样点的雾滴沉积个数均小于10个/cm2,未满足叶片背面受药需求;除A、B、C等采样点满足叶片背面受药需求外,果树中层其他部位的雾滴沉积个数均小于15个/cm2,各采样点雾滴沉积个数变异系数达88.23%,果树下层各采样点雾滴沉积个数变异系数达78.63%,中层和下层的雾滴沉积分布均匀性较差。如图10d~10f,与非对靶喷雾类似,对靶喷雾时叶片正面与叶片背面的施药效果存在一定差异;冠层不同高度叶片背面的变异系数为48.59%,尤其是果树上层与中层,只有外侧的3个采样点(A、B、D)满足果树施药需求,其他部位雾滴沉积个数较少,上、中、下3层各采样点雾滴沉积个数变异系数分别为91.57%、95.30%、43.17%,雾滴分布均匀性较差。
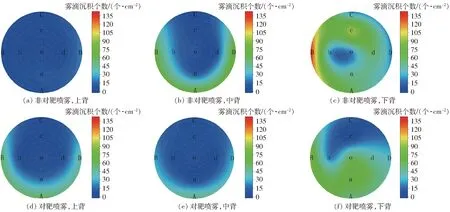
图10 果树冠层不同高度叶片背面雾滴沉积分布图
分析对靶喷雾与非对靶喷雾下果树冠层叶片背面雾滴沉积效果,可知:喷雾角度的实时调整,无法显著提高果树冠层叶片背面的施药效果;两种作业模式下,果树冠层叶片背面的雾滴沉积效果均较差,推测是在作业过程中,风机风场并未对果树冠层叶片完成有效的扰动与翻转,这可能与风机送风参数恒定不变有关。
3.3.2用水量分析
按照单侧喷雾试验的喷雾工作参数,使用喷雾机分别以对靶喷雾模式与非对靶喷雾模式进行20 m喷雾作业,作业面积约160 m2,每种模式重复3次。测得对靶喷雾模式下的平均用水量为4.4 L,非对靶喷雾模式下的平均用水量为6.0 L,表明相同作业面积下,相比于非对靶喷雾,对靶喷雾可有效节省26.70%的用水量。
3.3.3流失量分析
喷雾机作业时,部分雾滴会由于未沉积在果树冠层叶片上而流失到地面或飘移至冠层后面,造成药液浪费与土壤污染,因此地面流失量与冠后飘移流失量是检测喷雾机性能的重要因素。
喷雾机两种作业模式下各采样点的地面流失量分布如图11,分析可知:对靶喷雾时各采样点的平均地面流失量为4.34 μL/cm2,远低于非对靶喷雾时的28.88 μL/cm2,减少约84.93%;相比于对靶喷雾,非对靶喷雾时采样点G1~G6的地面流失较为严重,流失量约为对靶喷雾的7.3倍,采样点G7~G9的地面流失量与对靶喷雾基本一致,其原因可能是:非对靶喷雾作业时喷雾角度恒定,许多雾滴未透过果树冠层,直接沉积在地面上,造成靠近喷雾侧地面流失量较大,而由于喷雾距离的限制,远离喷雾侧的采样点地面流失量较小。
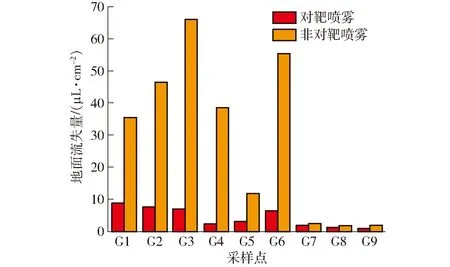
图11 两种作业模式地面流失量分布
图12为各采样点冠后飘移流失量分布图。分析可知:对靶喷雾时各采样点的平均飘移量为0.47 μL/cm2,非对靶喷雾时各采样点的平均飘移量为1.01 μL/cm2;相比于非对靶喷雾,对靶喷雾减少约53.5%的冠后飘移流失量,表明对靶喷雾对减少雾滴的冠后飘移具有一定效果。除采样点B3与采样点B6外,其他采样点对靶喷雾时的飘移量均小于非对靶喷雾时的飘移量,考虑到点B3与B6位于同一水平线上,推测可能是由于对应水平线处靶标冠层较为稀疏,雾滴在风场气流胁迫下直接穿过冠层飘移至采样点,从而造成较为严重的雾滴流失。
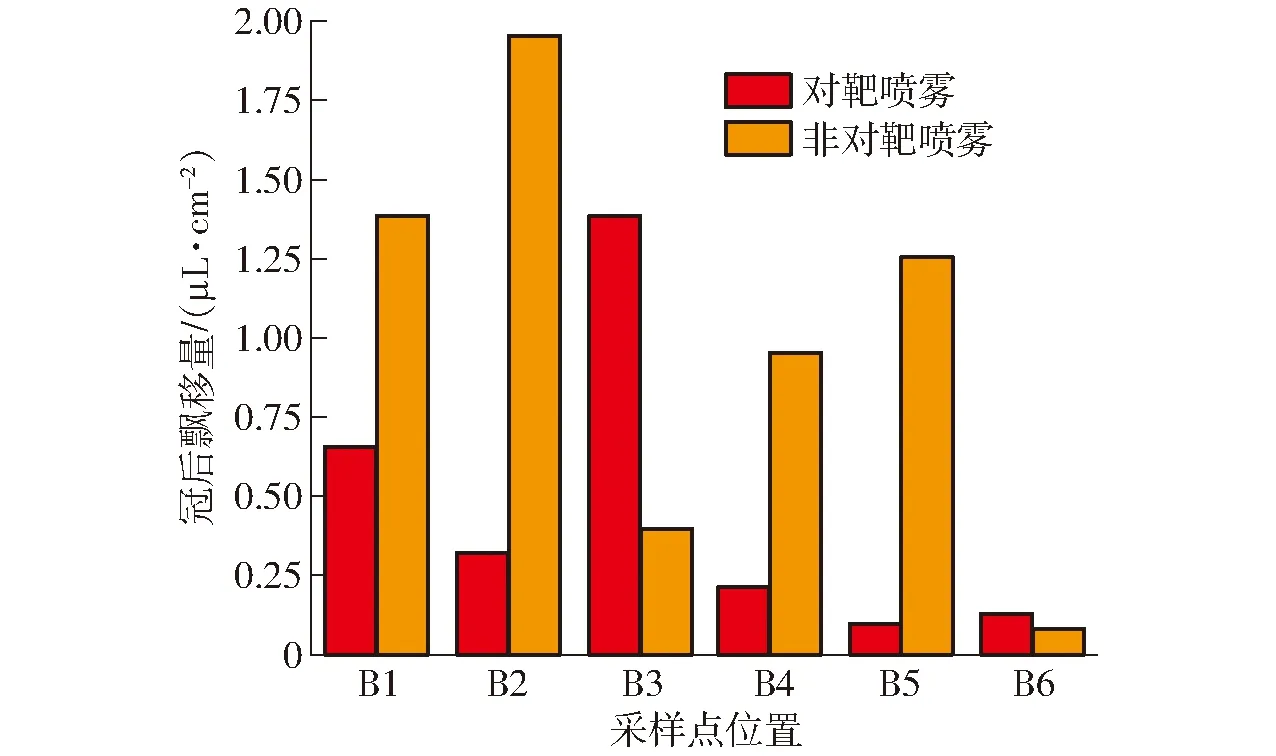
图12 两种作业模式冠后飘移量分布
3.3.4双侧喷雾效果分析
图13为双侧喷雾时对靶喷雾与非对靶喷雾地面流失量分布,结合图11所示的单侧喷雾流失量分布,分析可知:对靶喷雾时的平均地面流失量为65.37 μL/cm2,非对靶喷雾时的平均地面流失量为80.99 μL/cm2,约为对靶喷雾的1.24倍,表明对靶喷雾可有效减少雾滴地面流失;相比于单侧喷雾,双侧喷雾时对靶喷雾的地面流失量增加2倍以上,其原因可能是选取的果树冠层下部离地面相对较近,调整靶标后部分雾滴直接沉积在地面,造成一定的地面流失。
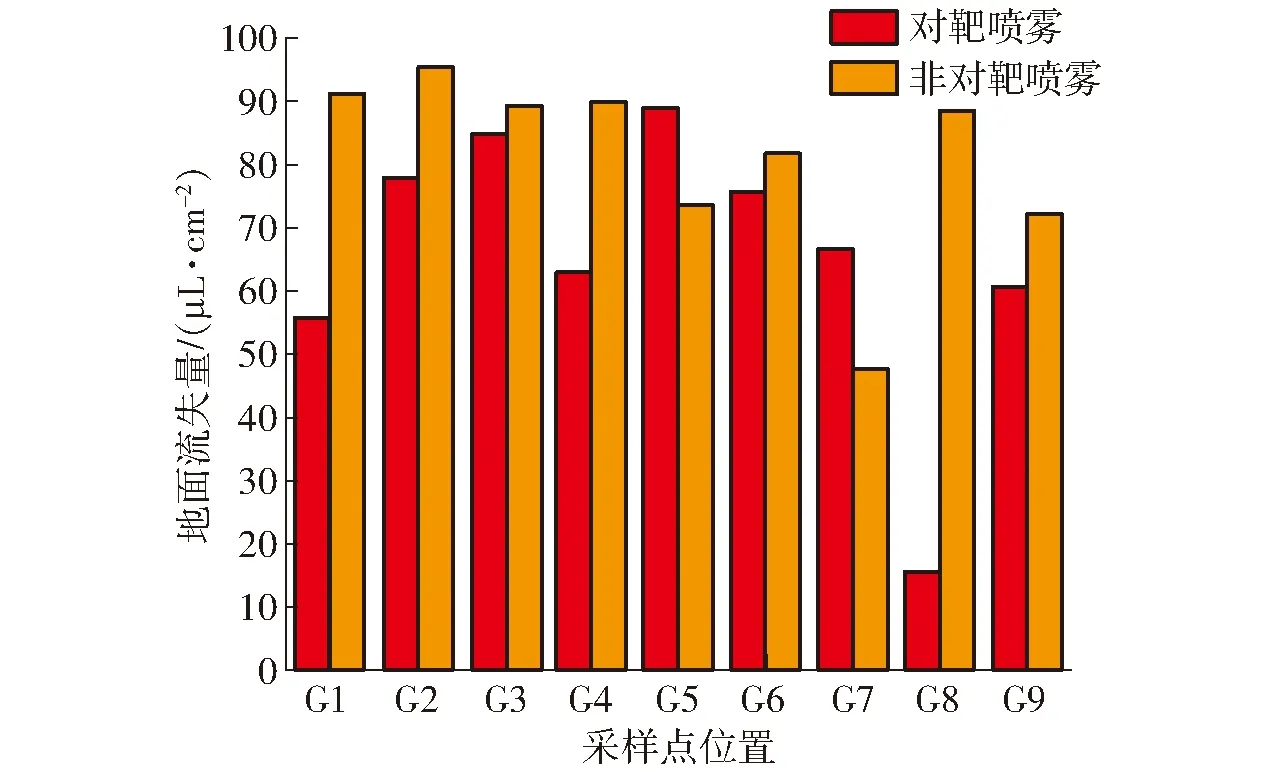
图13 双侧喷雾时两种作业模式地面流失量分布
图14为双侧喷雾时两种作业模式在果树冠层不同高度叶片正反面的施药效果,对靶喷雾时果树冠层不同高度叶片正面的平均雾滴沉积个数为77.84个/cm2,叶片背面为66.16个/cm2;不对靶喷雾时果树冠层不同高度叶片正面的平均雾滴沉积个数为74.13个/cm2,叶片背面为78.47个/cm2。结合图8,可分析得到:对靶喷雾时叶片正面平均雾滴沉积个数是单侧喷雾的1.68倍,叶片背面平均雾滴沉积个数是单侧喷雾的2.37倍;非对靶喷雾时叶片正面平均雾滴沉积个数是单侧喷雾的1.37倍,叶片背面平均雾滴沉积个数是单侧喷雾的2.54倍;相比于单侧喷雾,双侧喷雾时对靶喷雾与非对靶喷雾在果树冠层不同高度叶片正反面的平均雾滴沉积个数均有所增加,且均达到了叶片的施药需求,其中叶片背面的平均雾滴沉积个数增加较为明显,均为单侧喷雾的2倍以上,其原因可能是双侧喷雾时,雾滴可透过冠层沉积在冠层远离喷雾侧的叶片背面,提高果树叶片背面的施药效果。

图14 双侧喷雾时两种作业模式在果树冠层不同高度叶片正反面施药效果
由图14可知,双侧喷雾时对靶喷雾上、中、下3层叶片正面的雾滴沉积个数变异系数为4.83%,叶片背面为28.52%;非对靶喷雾上、中、下3层叶片正面的雾滴沉积个数变异系数为34.23%,叶片背面为26.50%。分析可知:相比于非对靶喷雾,对靶喷雾可显著提高果树冠层不同高度叶片正面的雾滴沉积分布均匀性,但叶片背面的雾滴沉积分布效果与非对靶喷雾类似,果树不同高度的雾滴分布均匀性较差,此结果与单侧喷雾一致,表明喷雾角度的实时调整,无法显著提高果树冠层叶片背面的施药效果。
4 结论
(1)根据雾滴运动规律及丘陵果园农艺特点,设计双喷头联动式靶标跟随风送喷雾系统,完成小型靶标跟随喷雾机的样机试制,并在样机上集成自主导航系统及靶标探测追踪系统,实现了喷雾机的果园自主作业。
(2)果园单侧喷雾试验表明,对靶喷雾时果树冠层不同高度叶片正面的雾滴沉积个数变异系数为34.22%,果树上、中、下3层各采样点叶片正面的雾滴沉积个数变异系数分别为21.43%、27.28%、54.98%,平均变异系数为34.56%,相比于非对靶喷雾,可有效提高冠层不同高度及冠层内外叶片正面的雾滴分布均匀性;相同作业面积时,对靶喷雾可节省26.70%的用水量,减少84.93%的地面流失量以及53.50%的冠后飘移流失量,有效减少了药液的浪费。
(3)果园双侧喷雾试验显示,果树冠层不同高度叶片正面的雾滴沉积个数变异系数为4.83%,叶片背面变异系数为28.52%,叶片正反面平均变异系数为16.68%,表明相比于非对靶喷雾,对靶喷雾可有效提高果树冠层不同高度叶片正反面的雾滴分布均匀性,满足果树冠层中下部叶片正面受药需求,验证了丘陵果园自走式小型靶标跟随喷雾机的性能。
