基于扰动估计补偿的PMLSM固定时间积分滑模控制*
2023-09-22艾雄雄
艾雄雄, 张 博, 邓 斌, 王 杰
(西安工程大学 电子信息学院,陕西 西安 710600)
0 引 言
与传统旋转电机相比,永磁直线同步电机(PMLSM)工作在直接驱动模式下,可以将推力直接加到负载上,具有定位精度高、推力大、速度快、结构简单等优点,已成功应用于交通运输、航空航天、精密激光切割等控制系统中[1-2]。但由于PMLSM取消了齿轮和滚珠丝杠等机械传动装置,导致负载变化和外部扰动等不确定因素对系统的影响大幅提高。此外,直线电机系统特有的齿槽力、边端力等内部不匹配扰动也会对控制精度造成影响[3]。因此,如何应对内外部不匹配因素对PMLSM的影响是目前需要解决的主要问题。
滑模控制是一种强鲁棒性的非线性控制策略,可以忽略各种不确定因素的影响,广泛应用于伺服控制系统领域。但是传统滑模控制采用线性滑模面,只能保证时间趋于无穷大时,系统才会收敛到平衡状态[4]。为了提高系统收敛速度,文献[5]在传统幂次趋近律的基础上,引入了Fal函数并与新型全局快速终端滑模结合的模型,该模型提高了系统的趋近速度,但是无法避免奇异问题的产生。文献[6]采用反馈线性化技术设计了单回路终端滑模控制器。该方法可使电机转速和电流在有限时间内达到参考值,实现快速瞬态响应,但是有限时间内控制方法受系统初始状态影响。为了提高系统抗干扰能力,文献[7]设计了基于反步滑模面的不匹配扰动观测器,观测系统的内部与外部不匹配扰动,但对于周期小,频率大的快时变扰动仅能实现有偏差观测。文献[8]提出了一种超螺旋滑模扰动观测器,对系统扰动进行观测并进行前馈补偿,进一步提高了系统的鲁棒性。但是超螺旋算法参数需要根据扰动的上界进行选取,在实际应用中难以获取[9]。
鉴于上述分析,本文设计了一种基于扰动估计补偿的固定时间积分滑模控制(DFISMC)方法。DFISMC采用固定时间趋近律结合非奇异快速终端滑模面的方式,保证系统状态在避免非奇异问题的同时可在固定时间内收敛,收敛时间与趋近率参数相关。为进一步加快收敛速度,设计固定时间动态趋近率,加快收敛速度的同时减小系统抖振。考虑到系统的不确定性扰动对电机运动过程的影响,设计了自适应超螺旋扰动观测器,实现不确定性扰动有限时间观测,提高系统的动态性能。利用Lyapunov函数分析方法验证了该方案的有效性和稳定性。最后,通过试验验证了该控制方法比PI控制及积分滑模控制具有更好的调节性能和更强的抗干扰能力。
1 数学模型
1.1 PMLSM数学模型
PMLSM采用id=0的磁场定向控制,磁滞和涡流损耗不计,空间磁场呈对称正弦分布。在表贴式PMLSM中Ld=Lq,则简化的PMLSM模型表示为
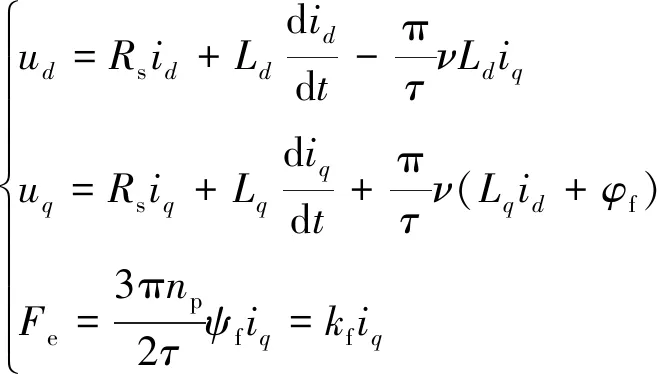
(1)
式中:ud和uq分别为d、q轴电压;id和iq为d、q轴电流;Rs为绕组电阻;Ld、Lq分别为d、q轴电感;Fe为电磁推力;kf为推力系数;τ为永磁体极距;np为电机的极对数;ψf为永磁体磁链。
PMLSM运动方程为

(2)
式中:M为动子质量;B为黏性摩擦因数;v为动子运动速度;F为不确定因素,包括摩擦力Fd、负载扰动Fl和参数变化FΔ。

(3)
设定vd为速度信号,并作出以下假设:
1.2 定义与引理
定理1:固定时间基本理论
考虑如下非线性系统:

(4)
其中,f(x):Rn→Rn,是一个连续函数。
当系统(4)处于全局有限时间稳定的状态,并且存在一个稳定时间函数T(x),使得T(x)≤Tmax成立,其中Tmax是固定常数。则系统(4)的平衡点x=0时固定时间稳定[10]。

2 控制系统设计
基于扰动估计补偿的固定时间积分滑模控制方法系统框图如图1所示。设计积分定时滑模面用于PMLSM控制器,观测器采用自适应超螺旋扰动观测器,有效提高系统的控制精度和鲁棒性。
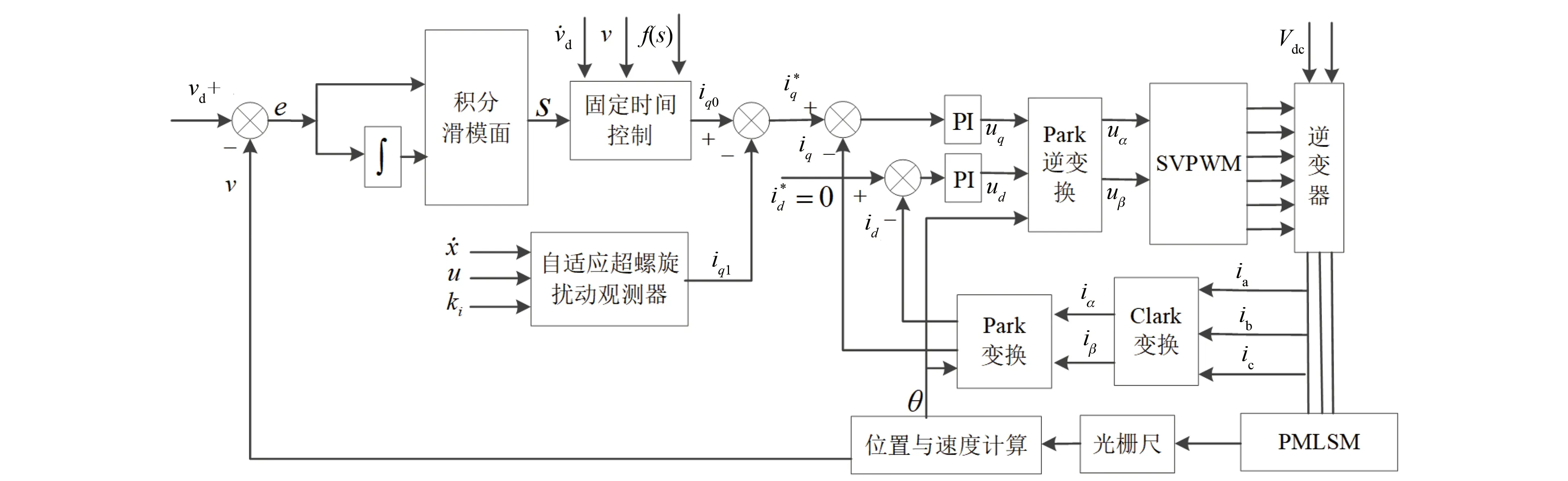
图1 基于扰动估计补偿的PMLSM固定时间积分滑模控制系统框图
2.1 固定时间积分滑模面设计
设vd为指定速度参考信号,定义速度跟踪误差e为
e=vd-x2
(5)
定义滑模面为

k2|e|α2sign(e)]dμ
(6)
式中:k1>0,k2>0;0<α1<1,α2>1。
将式(3)、式(5)代入式(6)并对其求导得到如下表达式:
k2|e|α2sign(e)
(7)

k2|e|α2sig(e)+l1sign(S)+
l2|S|β1sign(S)]
(8)
式中:l1>0,l2>0;β1>1。
将式(8)代入式(7)可得:

(9)
l2|S|β1sign(S)]≤D|S|-l1|S|-

(10)
式中:λ1=D-l1>0。
当S=0时,根据定理1,系统在固定时间内达到滑模面,其收敛时间上界为
(11)
2.2 自适应超螺旋扰动观测器设计
据式(11)可知,系统扰动对收敛时间有重要影响。因此,本节设计了一种自适应超螺旋扰动观测器,用来补偿系统扰动,提高控制精度。对于式(3)这一类含有不确定扰动的系统,设计辅助滑模面S1为

(12)
将式(3)带入式(13)并对其求导得:
(13)


(14)
此时补偿的电流值为

(15)
式中:ζ1和ζ2为自适应项。
自适应项表达式为

(16)
式中:a,b,χ,τ,ζm为正参数。

2.3 基于扰动估计补偿的固定时间积分滑模控制设计
为了进一步加快收敛速度并削弱抖振,基于式(14)的自适应超螺旋扰动观测器和式(6)的积分滑模面,设计控制率如下所示[12-14]:
u=iq0+iq1=
(17)

将式(17)带入式(7)可得:

(18)
当扰动可以被精确估计时,式(17)可表示为

(19)
(20)
根据定理1,系统在固定时间内达到滑模面,其收敛时间上界为

(21)
当系统状态在滑模面上时,S=0,对式(6)求导可得:

(22)
(23)
根据引理1,误差状态e会在固定时间内收敛于零,T3可表示为

(24)
综上所述,本文提出的基于扰动估计补偿的固定时间积分滑模控制器满足Lyapunov稳定性,并且可在固定时间内收敛到零。
3 仿真分析
为了验证本文提出的DFISMC系统有效性,搭建PMLSM仿真模型,分析DFISMC方法在不同输入信号情况下的收敛速度、速度误差和突加扰动情况下的抗干扰能力,证明本方法的有效性。通过与PI控制、积分滑模控制等算法进行对比验证本方法的改进效果。PMLSM仿真模型各项参数如表1所示。

表1 PMLSM参数表
(1) 电机空载起动,采样周期为1 s,给定速度信号为0.2 m/s,在0.3 s时给定外部负载扰动,其值为50 N。速度响应曲线如图2所示,从图中可知在到达阶段,DFISMC方法在0.018 s时到达给定速度,积分滑模方法在0.03 s时到达稳定状态,相较于其他两种方法,PI控制方法超调较大,在0.05 s时才到达给定速度。在突加扰动时,PI控制方法波动明显,恢复稳态时间为0.05 s,积分滑模方法波动较小,收敛速度与PI控制相当,而DFISMC方法波动最小,收敛速度也最快。

图2 阶跃信号下的速度跟踪图
图3为PI控制方法速度跟踪误差曲线图,速度误差约为-0.12~0.12 mm/s。图4为积分滑模控制方法速度跟踪误差曲线图,速度误差约为-0.04~0.05 mm/s,图5为DFISMC控制方法速度跟踪误差曲线图,速度误差约为-0.02~0.02 mm/s。由图3~图5可知,相较于PI控制方法,其他两种方法误差曲线更平滑,三种方法中DFISMC方法速度跟踪误差最小,跟踪精度最高。由此可知DFISMC方法动态响应速度更快,遇到扰动时超调量较小,具有较强的鲁棒性和抗干扰能力强。
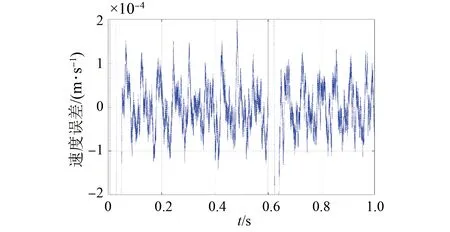
图3 PI控制算法速度误差图
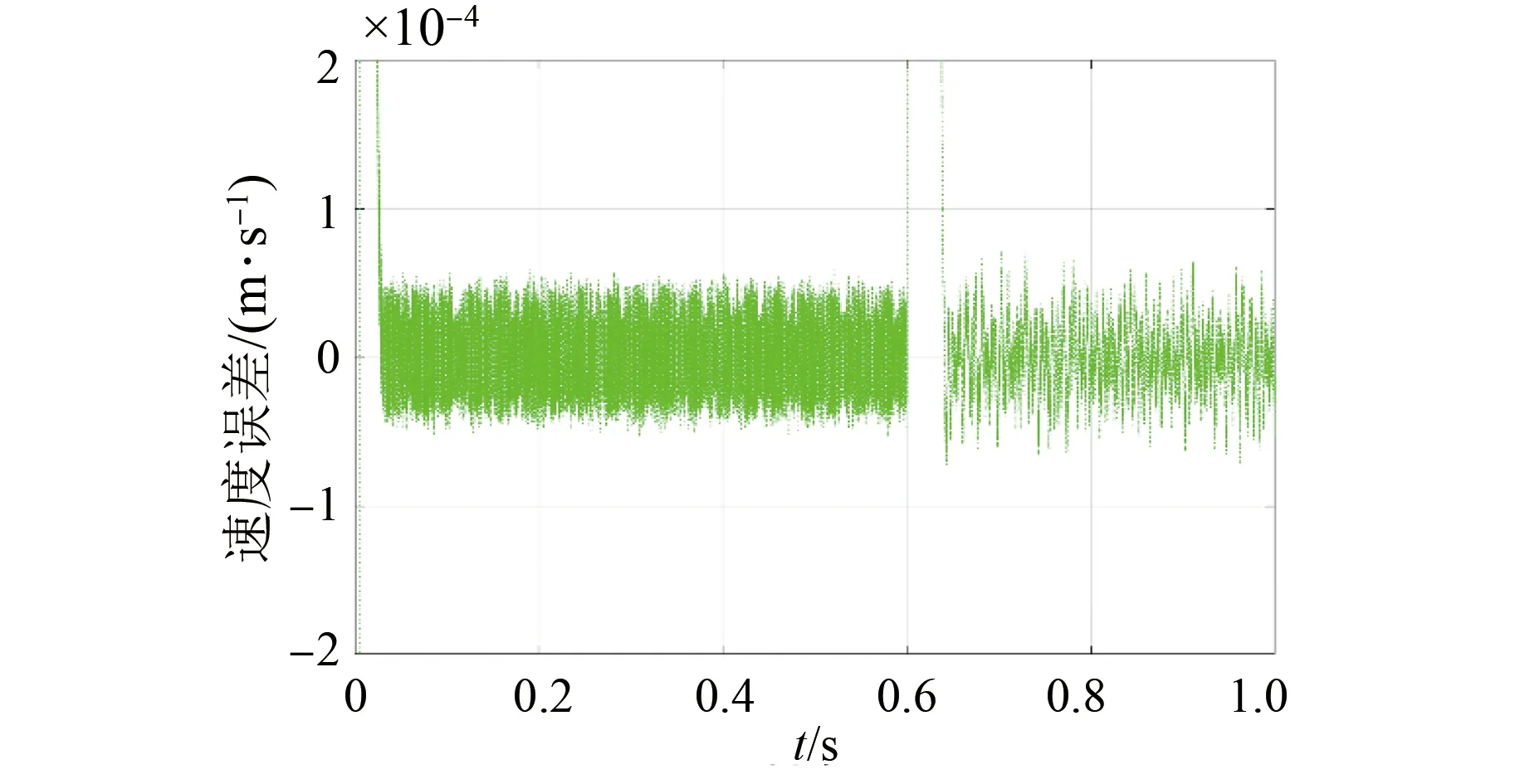
图4 积分滑模控制算法速度误差图
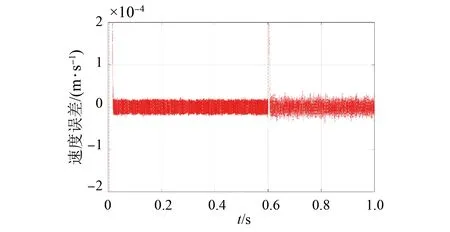
图5 DFISMC控制算法速度误差图
(2) 为验证本文提出的方法在变速条件下的动态性能,给定梯形轨迹速度信号,初始速度为0,在0.25~0.75 s之间为0.2 m/s的匀速运动,其余时间为变速运动。三种方法的速度跟踪对比图如图6所示,通过细节放大图可知,在加速度突变时PI控制算法会有小幅超调,其余阶段三种方法都能很好地跟踪到给定速度。
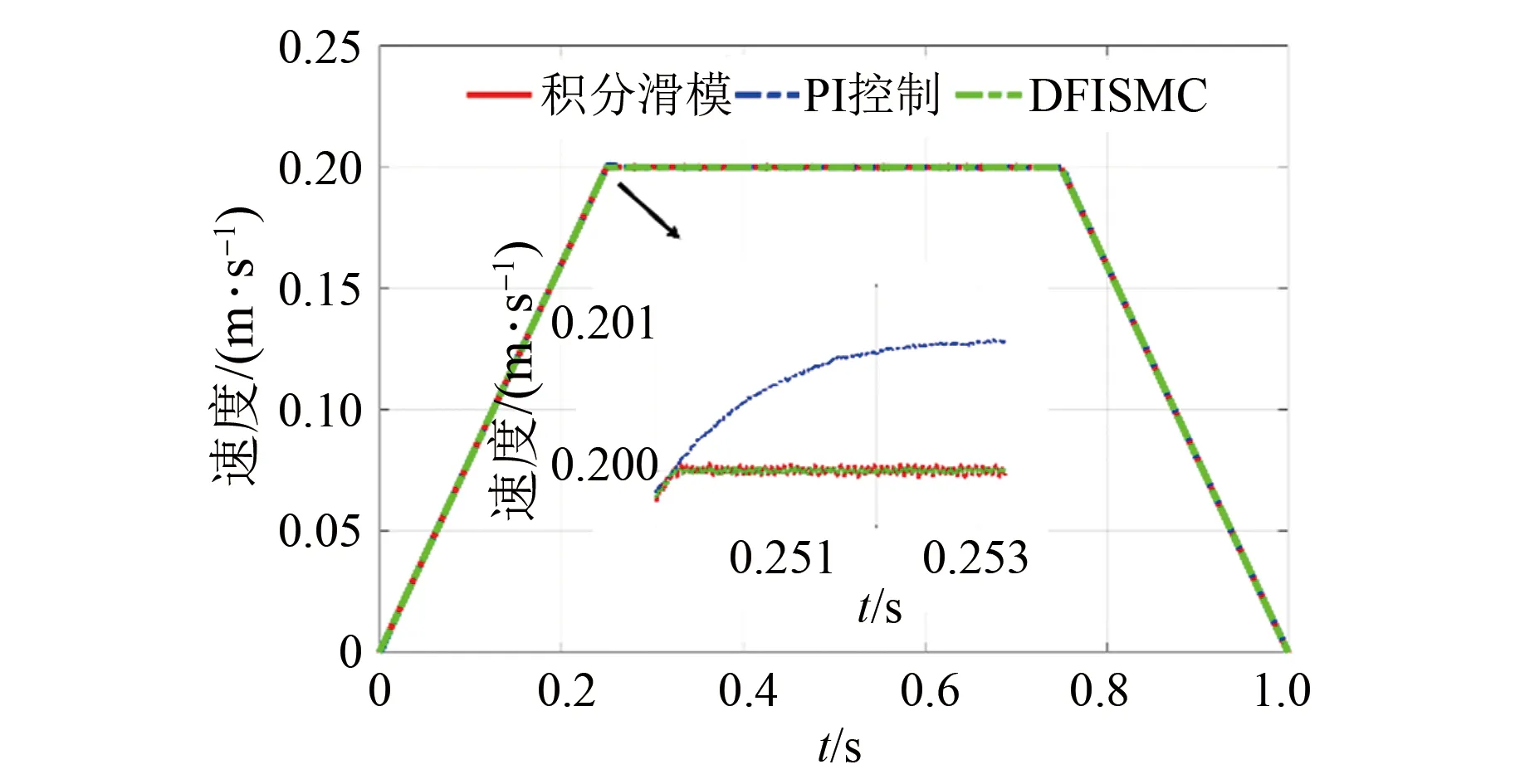
图6 梯形信号下的速度跟踪图
图7为PI控制方法速度跟踪误差曲线图,速度误差约为-0.1~0.09 mm/s,图8为积分滑模控制方法速度跟踪误差曲线,速度误差约为-0.05~0.05 mm/s。图9为DFISMC方法速度跟踪误差曲线,速度误差约为-0.01~0.01 mm/s。由图7~图9可知,在0.25 s和0.75 s处加速度突变时,PI控制方法的误差精度会有明显变化,积分滑模方法的误差精度也有小幅波动,DFISMC方法受影响最小,误差曲线最平滑,误差精度最低。

图7 PI控制算法速度误差图

图8 积分滑模控制算法速度误差图
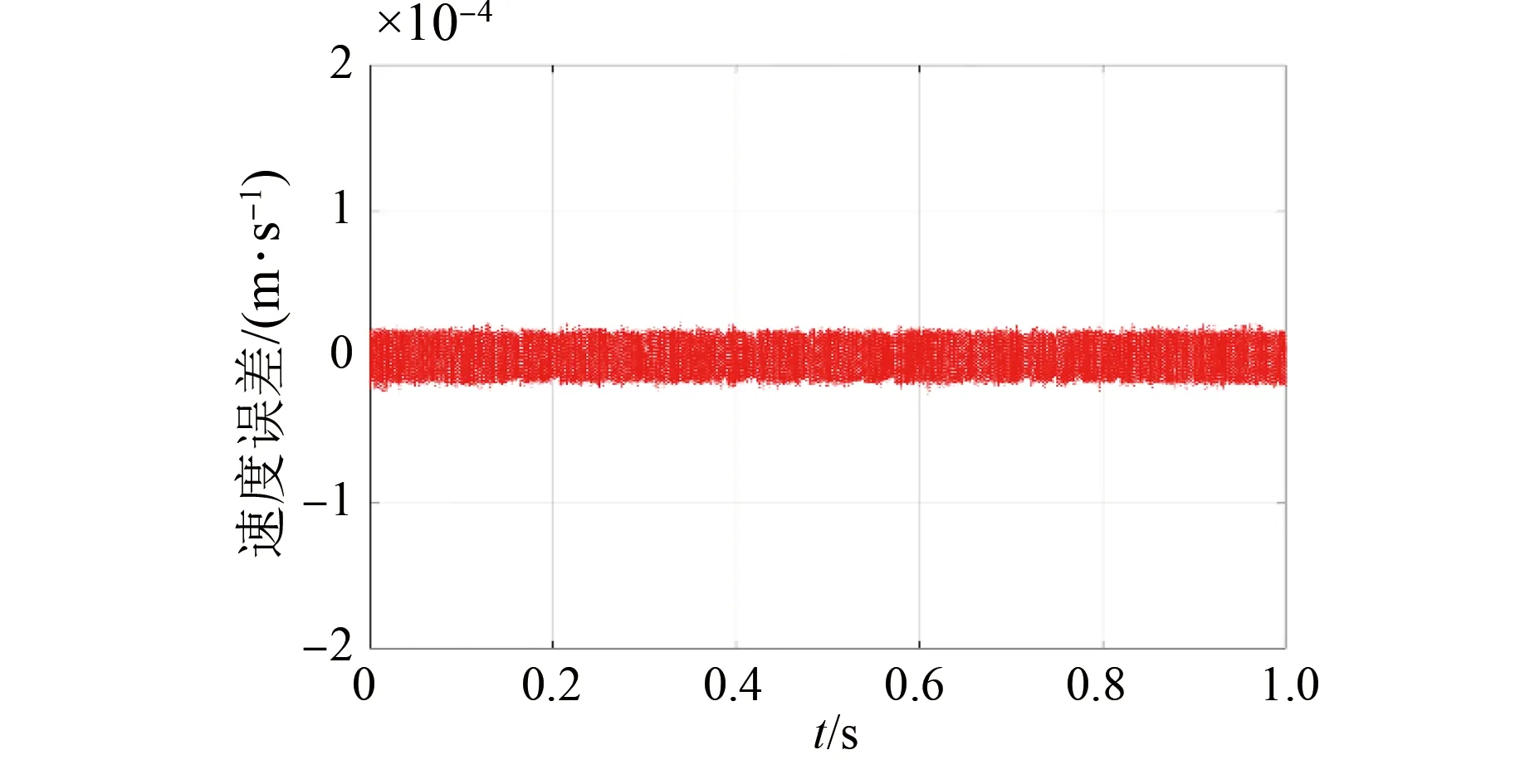
图9 DFISMC算法速度误差图
(3) 为验证本文提出的自适应超螺旋扰动观测器的观测性能,在负载侧施加定位力,构造定位力时,将定位力看作是动子位置的函数,以一个极距、半个极距、四分之一个极距和八分之一个极距为周期分别构造推力波动的基波、二次谐波、四次谐波和八次谐波。定位力构造计算式如下[8]:
Ff=2.29·sinθ+6.27·sin(2θ)+
1.01·sin(4θ)+0.6·sin(8θ)
(25)
其中,θ=2πx/τ。
图10为定位力观测结果图,图11为观测误差图。由从图10~图11可知,自适应超螺旋扰动观测器可以较为准确地观测到定位力,观测误差约为-0.5~0.5 N。由此可知,当实际运行中定位力存在时,本文提出的自适应超螺旋扰动观测器可以有效地观测到扰动值,提高系统抗干扰能力。
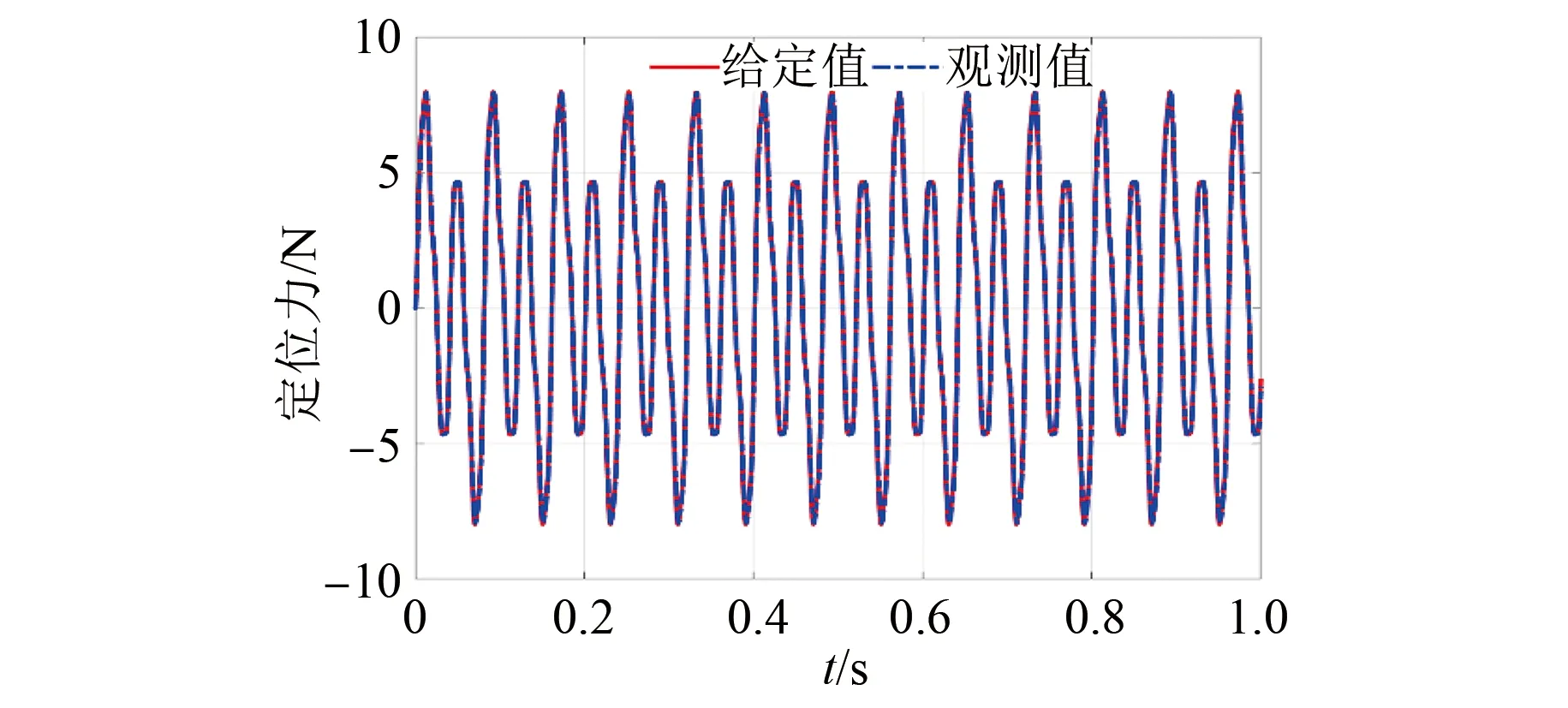
图10 定位力观测图

图11 定位力观测误差图
由上述仿真结果可知,本文提出的基于DFISMC的算法在不同输入信号的情况下,都能准确地跟踪到给定速度,有效降低了系统速度跟踪误差,给定模拟定位力时也能准确地观测到扰动值。与改进之前的方法对比可知,基于DFISMC的算法提高了系统位置跟踪性能,减少了未知因素的影响。
4 结 语
本文提出了一种基于扰动估计补偿的固定时间积分滑模控制方法来改善系统参数变化、负载扰动等问题,设计了一种固定时间积分终端滑模面,引入函数f(s)促使趋近率系数可以进行动态调整,在避免非奇异问题的同时加快了收敛速度。针对内部和外部不匹配因素的影响引入自适应超螺旋扰动观测器并将观测结果进行前馈补偿,最后通过仿真与其他控制方法进行对比。结果表明,本文设计的DFISMC算法在不同输入情况下都能有效地跟踪到给定信号,超螺旋扰动观测器在添加定位力和负载时都能准确地观测到扰动值并给予反馈。与改进之前的方法进行对比可知,DFISMC算法降低了速度跟踪误差,提高了动态响应速度,保证了系统的全局鲁棒性,可以应用于PMLSM伺服系统。
