四轮爬壁机器人滑移转向运动分析
2023-09-21唐东林谢光磊
唐东林,谢光磊,李 龙,陈 印
(西南石油大学机电工程学院石油天然气装备教育部重点实验室,四川 成都 610500)
1 引言
目前,爬壁机器人的应用范围广阔,具有良好的发展前景。绝大多数轮式爬壁机器人采用滑移转向的方式完成运动方向的改变,即通过改变两侧车轮速度来实现转向,能实现原地转向运动,具有转向灵活性好、结构简单、成本低、节省空间等优点[1]。
四轮爬壁机器人作为无损检测设备的载体,需要其完成对被检物表面的全遍历扫查,在此过程中机器人会进行多次原地转向运动。四轮爬壁机器人在铅垂壁面上进行原地滑移转向时,在重力作用下会发生明显的滑移现象,而在壁面直线运动时滑移较小。转向过程中发生的滑移对爬壁机器人的运动控制、路径规划带来了较大影响,例如:轻微的滑移会导致机器人偏离规划路径,严重情况下会使机器人发生壁面失稳。滑移现象是有待研究和解决的一大问题。国内针对轮式车辆在地面上进行稳态滑移转向的研究较多,而针对轮式爬壁机器人在壁面滑移转向运动的研究较少。文献[2]建立了四轮爬壁机器人驱动轮不发生横向滑动的动力学模型。文献[3]建立了三角履带式爬壁机器人越障动力学模型并进行了分析。文献[4]对六轮滑动转向爬壁机器人的壁面运动动力特性进行了分析。但是以上研究没有对爬壁机器人壁面转向滑移进行定性定量分析。针对轮式爬壁机器人壁面滑移现象进行研究,通过理论分析建立四轮驱动爬壁机器人转向运动的运动学、动力学模型,进而推导出滑移运动模型,基于数值模型分析滑移量的影响因素,对于减弱滑移现象对爬壁机器人运行控制、路径规划带来的影响具有重要意义。
2 爬壁机器人结构
设计的爬壁机器人主要结构包括:车体、外壳、磁吸附机构、驱动电机、车轮、倾角传感器、激光雷达等,如图1所示。机器人为四轮独立驱动,各轮能够独立输出不同转速和扭矩;采用永磁吸附方式,吸附力由底部安装的四块高磁能积的钕铁硼N52所组成的吸附机构提供,顶部安装有激光雷达和倾角传感器,具备自动化运行能力。基于全遍历检测要求和提升续航能力考虑,机器人调整运行方向时选择原地转向方式。
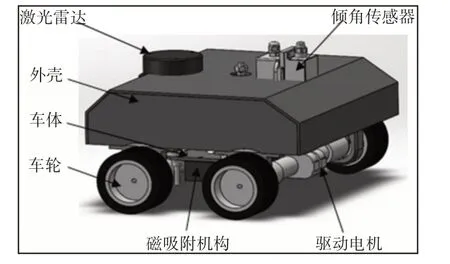
图1 爬壁机器人结构图Fig.1 Wall Climbing Robot Structure Drawing
3 爬壁机器人转向运动分析
爬壁机器人原地转向过程中的速度分解,如图2所示。XOY为壁面坐标系,xcy为机器人本体坐标系。其中,c点为机器人的几何中心,为便于分析,假定几何中心与质心重合。θ为机器人转向角,B为爬壁机器人左、右轮中心轴线间距,L为机器人前后轮轴距。以下标1,2对应绕转向中心右侧前、后轮,下标3,4对应左侧前、后轮。

图2 机器人原地转向速度分解Fig.2 Robot in Situ Steering Speed Decomposition
如图2所示,机器人以质心c点为转向中心进行转向时,机器人本体转向横摆角速度为ω,左侧3、4驱动轮转动角速度为ωl,右侧1、2驱动轮转动角速度为ωr,左右两侧驱动轮转向速率相同,转向相反,形成差速转向方式。两者关系为:
第i驱动轮上触壁点相对于车体的速度为vi,轮中心wi相对于壁面坐标系的绝对速度为vei,其方向垂直于L( )c,wi其为机器人质心到各轮中心的距离,驱动轮触壁点相对于壁面坐标系的绝对速度vri由vi和vei合成,以驱动轮3为例进行分析,vr3与x方向的夹角为αr3,ve3与x方向的夹角为αe3,速度vi与y方向的夹角为驱动轮侧偏角βi,可得:
同理,其余驱动轮的夹角αri可通过计算得到,且四个驱动轮夹角αri相等:
4 爬壁机器人运动学建模
由于爬壁机器人采用滑移转向方式,在对其进行运动学分析时需考虑纵向和横向的滑动。定义左、右侧驱动轮的纵向滑移率为ρl、ρr,其表达式为:
式中:vejx、veix—左、右侧驱动轮心的横向速度,为轮心相对于壁面坐标系的绝对速度沿x方向上的分量由式(4)、式(6)可得:
考虑机器人纵向和横向滑动的完整运动学模型可表征如下:
式中:vcx—机器人质心在本体坐标系下的横向速度;vcy—机器人质心在本体坐标系下的纵向速度;Xo—瞬心横坐标。在壁面坐标系XOY下的运动学模型可表征为:
式中:R(θ)—用于本体坐标系向壁面坐标系进行坐标转换的旋转矩阵,表示如下:
5 爬壁机器人支持力分析
如图3所示,对机器人平衡状态下进行支持力分析,建立力和力矩的平衡方程:
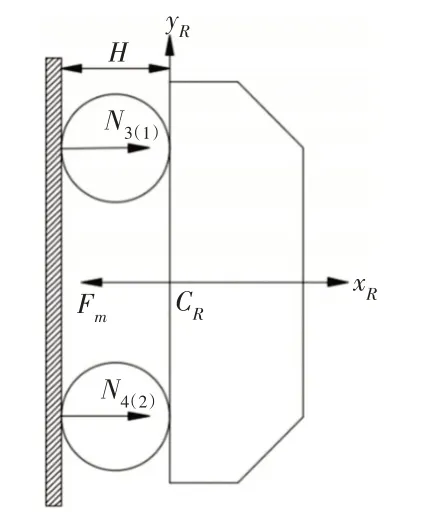
图3 机器人支持力分析Fig.3 Support Force Analysis of Robot
式中:N1、N2、N3、N4—各轮所受支持力;G—机器人重力;H—机器人重心高度,由上式计算得到各轮所受支持力为:
6 爬壁机器人摩擦力分析
机器人在壁面上静止时不发生滑移,当爬壁机器人进行原地转向时,各驱动轮与壁面之间处于相对滑动状态,而滑动摩擦力小于最大静摩擦力,导致机器人在转向过程中发生滑移。
根据Herz接触理论可将爬壁机器人和壁面之间近似处理为2个弹性体的接触问题[5]。当一个直径为d1、长度为D1的圆柱体(车轮)和一个直径为d2、长度为D2的圆柱体(壁面)在磁吸附力的作用下发生接触时,两圆柱体之间的接触区为矩形(图4阴影部分),其宽度为2b,b的表达式为:
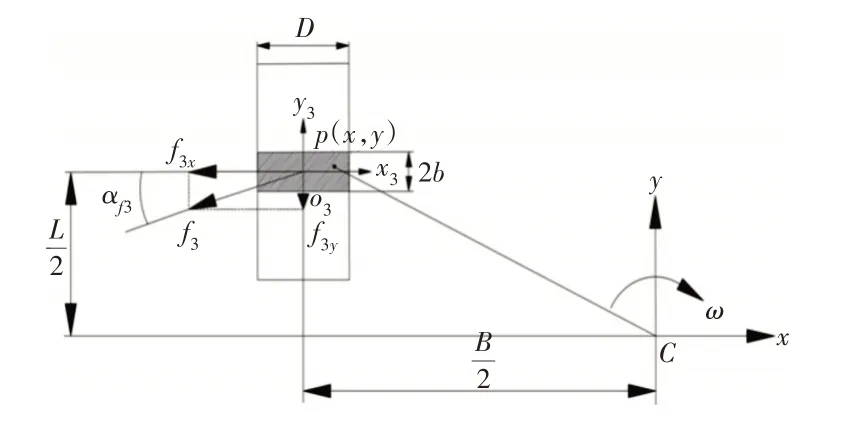
图4 轮-壁接触区摩擦力分析Fig.4 Analysis of Friction in Wheel-Wall Contact Area
因d2≫d1,l= min(D1,D2),可将式(16)简化为:
式中:r—车轮半径;D—车轮宽度;Fm—吸附装置提供的吸附力;E= 2 × 109Pa—等效弹性模量[6]。以轮3为例,在轮心坐标系下,轮-壁接触区内的压力分布为:
则在接触区内由轮-壁之间发生相对滑动而产生的滑动摩擦力f3可表示为:
式中:μd—车轮与壁面的滑动摩擦系数,车轮所受滑动摩擦力方向与接壁点相对于壁面的绝对速度方向相反,有αf3=αr3,根据图5几何关系,由式(7)、式(19)可得滑动摩擦力在轮体坐标系下沿x3、y3方向的分量:
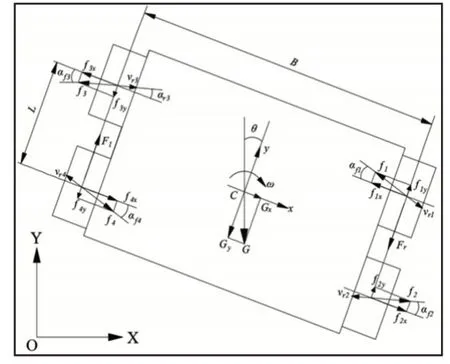
图5 机器人转向受力示意图Fig.5 Schematic Diagram of Robot Steering Force
如图3所示,在轮壁接触区内取一微元p(x,y),则该微元处产生的对质心C的转动阻力矩δMf为:
则机器人零半径转向阻力矩为:
7 爬壁机器人动力学模型
在本体坐标系下,对机器人原地转向运动进行分析,如图5所示。由牛顿-欧拉方程可得到其动力学模型[7]:
式中:m—机器人质量=d2XR/dt2—机器人质心C沿x方向的加速度=d2YRdt2—机器人质心C沿y方向的加速度;=ω—机器人转向角速度机器人转向角加速度;Fl—左侧3、4轮驱动力;Fr—右侧1、2轮驱动力,驱动力方向规定沿y正方向为正。
机器人原地转向可看作稳态匀速运动过程,因此:
同时,机器人与履带式车辆的原地转向原理相似,同为采用左右两侧等速反向的方式,以履带式车辆转向角速度公式为参考[8],可得机器人转向过程中转向角速度表达式:
根据机器人转向运动的驱动力表达式[9],在转向半径R= 0时有:
将式(23)~式(26)联立可得式(27):
将上式与式(12)、式(13)联立得到机器人在壁面坐标系XOY下的滑移运动模型:
8 机器人运动学仿真分析
基于上述建立的滑移运动模型,对机器人壁面原地转向运动进行数值仿真分析。爬壁机器人相关参数,如表1所示。在壁面坐标系下,机器人的初始位置为(X,Y,θ)=(0,0,0),完成一周原地转向运动后θ= 2π。为便于计算,将转向过程划分为Δθ= 1°的若干小段,运用Matlab对滑移运动模型方程进行数值积分求解,得到不同轮速下机器人原地转向至不同角度时质心位置所对应的横向位移量X、纵向位移量Y。

表1 机器人相关参数Tab.1 Related Parameters of Robot
驱动轮输出不同转速时所对应的横向滑移量变化曲线图,如图6所示。在轮速v=1m/min时,当转向角θ由0增大到90°时,横向滑移变化量最大,当机器人转向至90°时,横向滑移达到最大值59.5mm,从90°转向至270°过程中发生反向滑移,在270°时滑移量最小为29.5mm,转向270°至360°之间滑移量持续增大,最终横向滑移量为40mm,横向滑移量整体呈现出先增再减最后缓增的趋势,这是因为:当θ在[0°,90°]之间增加时,机器人质心的瞬时转向线速度方向位于第四象限,其速度的横向分量沿x正向,在重力沿x方向分力的作用下,产生了正向滑移,在图像上表征为横向滑移量的增加;θ在[90°,270°]之间增加时,瞬时转向线速度方向发生改变,在θ由90°转向180°过程中,线速度方向位于第三象限,在180°转向至270°时,位于第二象限,在此范围内,瞬时转向线速度的横向分量均沿x负方向,在重力作用下产生反向滑移,在图像上表征为横向滑移量的减少;θ由270°转向360°时,瞬时转向线速度方向位于第一象限,在重力作用下产生正向滑移,图像上表征为横向滑移量的增大。同时,横向滑移量随着车轮速度的增大而减少,当轮速由1.5m/min提升到2m/min时,横向滑移量下降明显,当轮速继续增大至3m/min时,滑移量只有很小的变化,因为随着轮速的增加,转向角速度也在增大,使得转向离心力变得不可忽略,在离心力的作用下使得滑移量增大。
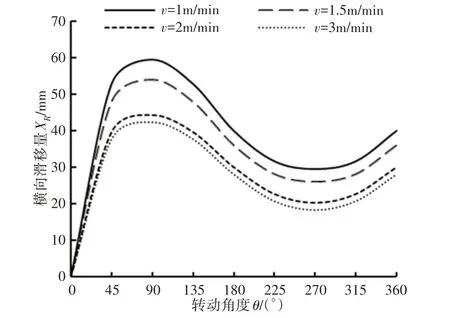
图6 不同轮速下的横向滑移量Fig.6 Transverse Slip at Different Wheel Speeds
驱动轮输出不同转速时所对应的纵向滑移量变化曲线图,如图7所示。由图可以看出,纵向滑移量表现出不同于横向滑移量的变化趋势,随着转向角的增大,其近似呈线性增长,且滑移量随轮速的增大而减小,这是由于机器人在转向过程中始终受到铅垂向下的重力作用而产生稳定的纵向滑移。轮速大小影响转向过程所用的时间长短,轮速越大转向角速度也就越大,机器人完成一圈转向运动所用时间也就越短,同时重力作用时间的缩短使得纵向滑移量减少。
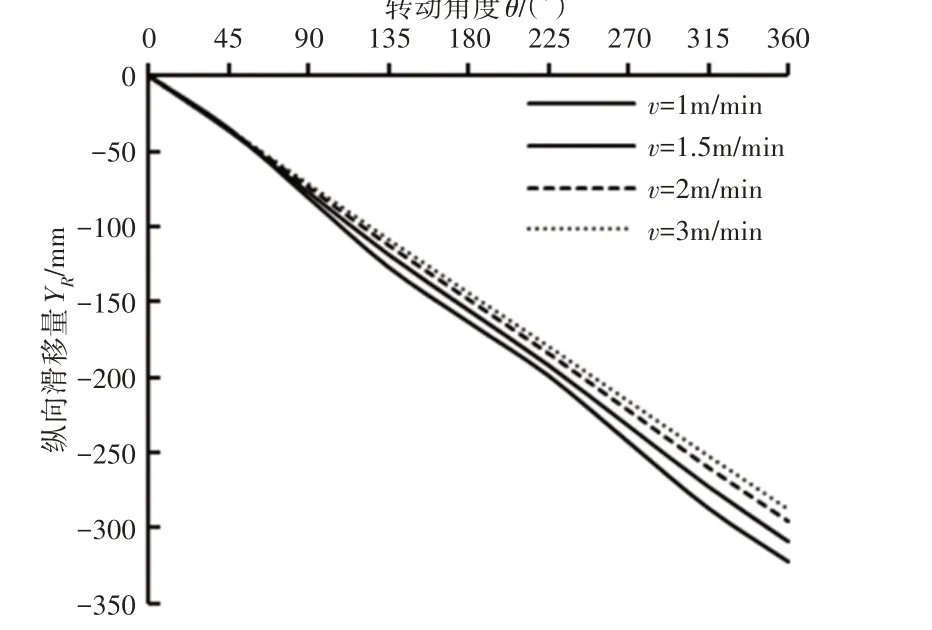
图7 不同轮速下的纵向滑移量Fig.7 Longitudinal Slip at Different Wheel Speeds
9 爬壁机器人原地滑移转向实验
同时以这里所研制的爬壁机器人样机作为实验对象,完成了四组不同轮速下的零半径转向运动实验,如图8所示。以初始时刻的机器人质心位置为参考系原点,在其转向过程中,分别测量θ等于π/2、π、3π/2、2π 四个角度时机器人质心相对于初始时刻的横、纵向位移量。
爬壁机器人转向运动实验数据测量值,如表2所示。将实验测量数据曲线与理论值进行比对,结果显示:实验结果与理论分析相吻合,但存在误差,考虑到实验测量存在误差和公式本身的误差,因此是在可接受范围的。结果表明:轮式爬壁机器人在零半径转向过程中会存在纵向和横向滑移,在实验观察中机器人滑移现象主要表现在纵向上的偏移,其纵向滑移量远大于横向滑移量。随着转向角的增大,其纵向滑移量近似呈线性增长,横向滑移量为先增再减最后缓增的变化趋势。机器人的轴距、轮间距、质量、轮速和磁吸附力是影响滑移量大小的相关因素,在保持其他参数不变的情况下,当轮速在一定范围内增加时,纵向和横向滑移量会随着轮速的增大而减小,当轮速继续增大时,转向时的离心力加剧了滑移,滑移量的变化不明显。
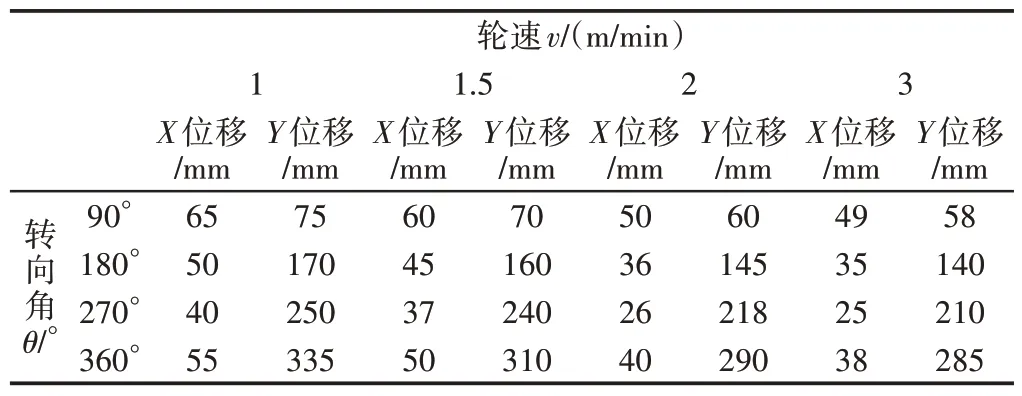
表2 实验测量得到的不同轮速下各转向角度对应的横向、纵向位移量Tab.2 The Lateral and Longitudinal Displacements of Each Steering Angle at Different Wheel Speeds Are Measured Experimentally
10 结论
(1)从摩擦力学、动力学角度对滑移现象分析得到发生原因是因为机器人的滑动转向方式导致车轮与壁面产生了滑动摩擦,因而在转向运动过程中,机器人与壁面之间为相对滑动状态,在机器人重力作用下使其运动轨迹发生偏移。
(2)建立了爬壁机器人滑移转向的运动学和动力学模型,推导出横向、纵向滑移运动的数学表达式。
(3)通过对滑移运动模型进行仿真计算得到不同轮速下横向、纵向滑移量的变化规律:在转向过程中,机器人会发生纵向和横向两个方向的滑移,纵向滑移量远大于横向滑移量,纵向滑移在滑移现象中占主导地位,在一定范围内增大轮速能有效减少滑移量。同时通过样机实验验证了机器人在壁面上的滑移运动规律,在一定范围内随着轮速的增大滑移量呈现下降趋势。
