基于NPC型三电平变换器的高速磁悬浮飞轮同步载波驱动技术
2023-09-19王鹿军张书烨赵思锋梁艳召张建平王晓光
王鹿军, 张书烨, 赵思锋, 梁艳召, 张建平, 王晓光
(1.湖北工业大学 太阳能高效利用及储能运行控制湖北省重点实验室,湖北 武汉 430068; 2.华中科技大学 电气与电子工程学院,湖北 武汉 430074; 3.河北省高速飞轮储能与节能技术重点实验室,盾石磁能科技有限责任公司,河北 石家庄 050800; 4.西岭磁能科技正定有限责任公司,河北 石家庄 050800)
0 引 言
近年来,飞轮储能以其高功率密度、高响应速度等优点,得到了专家学者的广泛关注,并在国外地铁网络中得到了示范应用[1-3]。然而,国外地铁供电网多为直流750 V电制,我国地铁多为直流1 500 V电制,瞬时浪涌可高达2 000 V,因此,飞轮储能系统应用于国内地铁网络中需要提高电压等级[4-5]。另外,通过提高飞轮转动惯量和飞轮转速可以提高飞轮储能容量,但转动惯量过大会造成飞轮体积、质量的大幅提升,给轴承结构和安装布置带来巨大压力,所以提高飞轮转速成为有效提升飞轮储能容量的方法,但需要解决高速电机驱动难题[6-8]。
在两电平变换器驱动高速无刷直流电机方面,文献[9]提出一种基于电压比例缩放谐波注入式脉宽调节方式,通过采取电压比例缩放的方法,消除了电压矢量计算角度偏差,提高了母线电压利用率及高速电机的电流响应特性;文献[10]提出了一种基于升压拓扑的无刷直流电机电流控制策略,构建了一种无需电感的升压拓扑结构用以驱动无刷直流电机,使驱动器的体积减小,并通过电流控制策略实现了无刷直流电机在换相区及非换相区内平稳的电流控制;文献[11]提出一种基于虚拟三次谐波反电动势和反电动势功率因数同步频率提取器的无位置传感器控制与补偿方案,该方法应用于无传感器驱动的高速磁悬浮无刷直流电机,并采用基于反电动势功率因数同步频率提取器的补偿方法对无刷直流电机的换相误差进行主动补偿,解决了高速无刷直流电机驱动系统中的换相误差问题;文献[12]提出了一种基于新型控制技术的内装式永磁无刷直流电机转矩脉动以及开关频率降低方式,通过引入一种新的电流波形作为控制电机的参考,在不增加计算复杂度和不改变电机定转子结构的前提下降低了磁阻转矩脉动的不利影响,并通过降低开关频率的方式降低了开关损耗;文献[13]提出了一种优化悬浮绕组导通区间的方法,文中分析了悬浮绕组的导通规律及转矩绕组加载对悬浮力脉动的影响,通过进一步优化悬浮绕组导通区间的方式,在理论层面使无轴承无刷直流电机的悬浮优化控制得到支持;文献[14]提出了一种直流环节电压快速控制策略,该策略取代了传统的直流电压外环和电流内环级联策略,无中间电流环,设计了一种扩展状态观测器来观测总扰动,并提出了一种补偿速度变化和总扰动的控制方式,保证了飞轮储能系统中的高速同步电机在宽工作范围内的快速动态性能。上述研究有效解决了高速无刷直流电机的控制问题,但由于两电平变换器功率器件多为1 700 V以下,3 300 V及以上功率等级器件成本将大幅提高,这导致包含无刷直流电机的高速磁悬浮飞轮驱动系统的电压等级无法简单提升,在我国地铁直流供电网中难以安全驱动。
在三电平变换器驱动无刷直流电机方面,文献[15]提出一种利用改进型单端初级电感转换器和NPC型三电平逆变器降低无刷直流电机换相转矩脉动的方法,通过减少转矩脉动提高无刷直流电机驱动系统的性能;文献[16]在分析两电平直接转矩控制方案的基础上提出一种无刷直流电机三电平直接转矩控制系统方案,该方案将定子磁链改为十二边形,使磁链幅值的变化减少,电机转矩脉动得到有效降低;文献[17]提出一种无刷直流电机转矩脉动抑制系统的CUK-NPC拓扑,由于传统的直流电源在该拓扑中被CUK变换器取代,因此,输出电压范围得到提高,转矩脉动通过NPC型三电平逆变器和CUK-NPC拓扑控制策略进一步被抑制,实验验证了在无刷直流电机中应用该拓扑及控制策略能够明显抑制无刷电机的换相转矩脉动;文献[18]提出一种用于无刷直流电机的反向PWM驱动方案,该方案从理论上分析了用于无刷直流电机驱动的三相逆变器高压侧绝缘栅双极晶体管的自举电路,通过减小自举电容的放电来避免欠压闭锁,实验结果表明,该方案在保持自举电容处于适当电压水平的同时,对其可控性没有限制。上述三电平变换器驱动无刷直流电机的研究均未涉及高速工况,无法验证其是否适用于高速飞轮储能系统。
上述文献分别对基于两电平变换器的高速无刷直流电机和基于三电平变换器的无刷直流电机进行了深入研究,但尚无直接应用于高压高速磁悬浮飞轮驱动的方法论述。本文针对国内地铁额定1 500 V、40 000 r/min的高速磁悬浮飞轮储能系统应用工况,提出基于NPC型三电平变换器的高速磁悬浮飞轮同步载波控制技术,解决两电平变换器难以适应高压环境及三电平变换器难以驱动高速电机的问题,并通过工程样机验证所提方法的有效性。
1 磁悬浮飞轮储能系统工作原理
磁悬浮飞轮储能驱动系统组成如图1所示。无刷直流电机在正常工作时,转子上的霍尔元件将转子位置信号反馈给控制单元,控制单元经计算后向驱动电路发送控制信号,改变逆变电路的运行状态,从而驱动飞轮加速或减速旋转,实现充放电[19]。

图1 磁悬浮飞轮储能驱动系统组成
理想状况下飞轮储能系统容量关系为
(1)
其中:E为飞轮储能系统容量;J为飞轮的转动惯量;ω为飞轮的角速度。由式(1)可知,飞轮转动时的动能与角速度的平方成正比,因此,提高飞轮的角速度能够有效地提高飞轮储能系统容量。由于飞轮转子与电机转子连轴,因此提高飞轮的角速度本质是提高无刷直流电机转子转速。
在无刷直流电机中,转速计算为
(2)
其中:n为无刷直流电机的转速;U为电机定子绕组实际电压大小;I为电机绕组内通过的实际电流大小;R为电路系统中包含电机的回路电阻大小;CE为电势系数;φ为励磁磁通。由于无刷直流电机的型号确定时,其励磁磁通和总电阻值一定,故提高无刷直流电机供电电压能够使其转速提升[20-21]。
本文所用电机为三相星型无刷直流电机,以充电状态(无刷直流电机作电动机)为例分析其数学模型,其等效电路如图2所示。
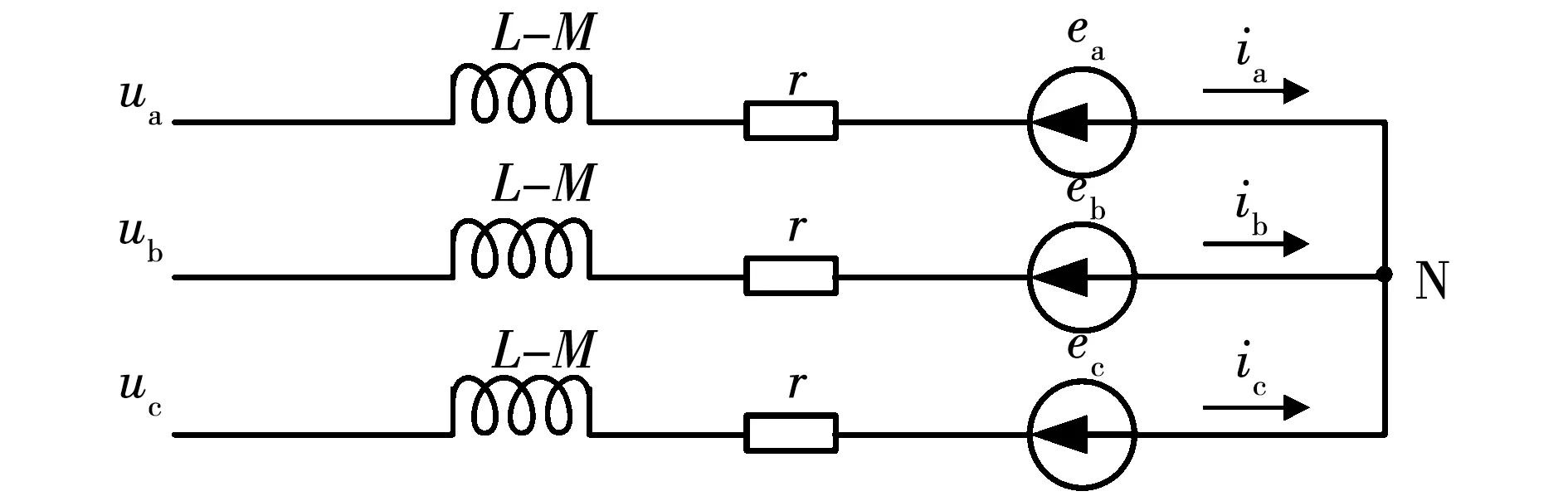
图2 三相无刷直流电机等效电路
无刷直流电机的变换器采用三相全桥开关电路、两相导通模式,则在运行过程中,A相的电压平衡方程式为
(3)
式中:r为定子每相绕组的电阻;ia为定子绕组中A相的相电流;L为定子每相绕组的自感;M为定子两相绕组间的互感;ea为定子绕组的A相反电动势;ua为定子绕组中A相的相电压。由于三相对称星形绕组中,三相电流的关系为ia+ib+ic=0,因此可得
(4)
由三相对称可得另外两相的电压平衡方程式为:
(5)
(6)
在高速磁悬浮飞轮驱动系统中,无刷直流电机供电电压由功率变换器提供,常采用两电平结构。驱动系统拓扑如图3所示[22],其中每相包含2个IGBT(insulated gate bipolar transistor)和2个续流二极管,正常工作时采用两相导通模式,每次换流在同一相的上下桥臂间进行,变换器输出相电压为±1/2Vdc,输出线电压为±Vdc,0,其中Vdc为直流母线电压。

图3 传统两电平变换器驱动系统拓扑
2 NPC型三电平变换器等效模型及中点电压平衡分析
2.1 NPC型三电平变换器等效模型
为解决两电平飞轮储能系统在地铁1 500 V电制中导通管耐压过高的问题,本文提出基于NPC型三电平变换器的高速磁悬浮飞轮驱动系统,拓扑结构如图4所示,其中Vdc为直流母线电压,an、bn、cn为变换器输出相电压的位置,P、O、N分别为变换器的正极、分压电容中点、负极,S1~S12为12个IGBT,D1~D12为续流二极管,D1′~D6′为6个箝位二极管。由于NPC型三电平变换器每相IGBT数量增加,辅以合理控制,能承受比两电平变换器更高的电压等级。

图4 基于NPC型三电平变换器的飞轮驱动系统拓扑
IGBT在不同导通组合下,NPC型三电平变换器能够输出的相电压为:±1/2Vdc,0;能够输出的线电压为:±1/2Vdc,±Vdc,0。忽略IGBT二极管导通压降,并规定由变换器流向磁悬浮飞轮的电流方向为正向,则在变换器中,每相导通状态有“1”、“0”、“-1”三种,“1”状态表示该相输出相电压为1/2Vdc;“0”状态表示该相输出相电压为0;“-1”状态表示该相输出相电压为-1/2Vdc。以A相为例分析每种导通状态下,变换器的IGBT状态与输出相电压:
1)在“1”状态下,S1、S2导通,S3、S4关断。若电流为正向,则经S1、S2流向an,此时A相输出相电压为1/2Vdc;若电流为负向,则由an经D1、D2注入P,A相输出相电压仍为1/2Vdc;
2)在为“0”状态下,S2、S3导通,S1、S4关断。若电流方向为正,则电流经D1′与S2流向an,由于此时输出端电位与O点等电位,因此A相输出相电压为0;若电流方向为负,则电流由an经S3与D2′注入O,A相输出相电压仍为0;
通过建立NPC型三电平变换器换相前电路稳态和换相瞬间的等效数学模型,可分析其输出线电压和其对应电流的关系。
由于变换器输出线电压为-Vdc和-1/2Vdc的分析方法与输出线电压为Vdc和1/2Vdc一致,因此仅选择变换器输出线电压在Vdc、0及1/2Vdc三种状态、且每种状态仅选一种典型工况建立等效数学模型,其他类似工况不作一一分析。若NPC型三电平变换器处于两相导通模式,初始导通相为A相和B相,换相后导通相为A相和C相,电流由变换器到磁悬浮飞轮为正向。
2.1.1 换相前电路状态
1)当A相处于“1”状态、B相处于“-1”状态时,S1、S2、S7、S8导通,其他关断,此时变换器输出线电压为Vdc,且ia=ib,输出线电压和定子电流的关系化简后为
(7)
2)当A、B两相均为“0”状态时,等效电路如图5所示,此时变换器输出线电压为0,且ia=ib,输出线电压和定子电流关系为

图5 换相前输出线电压为0时NPC型三电平变换器 等效电路
(8)
3)A相处于“1”状态、B相处于“0”状态时,S1、S2、S6、S7导通,其他关断,此时等效电路如图6所示,变换器输出线电压为1/2Vdc,且ia=ib,输出线电压和定子电流关系为

图6 换相前输出线电压为1/2Vdc时NPC型三电平变换器等效电路
(9)
2.1.2 换相瞬间状态
插穗的生长年限决定其体内的营养物质积累和木质化程度。1年生茎可能由于生长时间较短,养分存储不足,加上髓部较大,所含粘液较多而容易腐烂。所以多年生的插穗成活率普遍比1年生茎高,且根系平均长度、根丛数量、新生幼枝平均长度整体上都比1年生茎的表现出明显优势。但如果选取过于老化的枝条,其内源生长素会逐渐减低,细胞的再生能力也会逐渐降低,所以其生根能力和成活率也会降低,故在实际生产中,小花清风藤扦插繁殖建议剪取2~4年生的枝条作为插穗最适宜。
1)当A相处于“1”状态、C相处于“-1”状态时,变换器输出线电压为Vdc,输出线电压和定子电流关系为
(10)
2)当A、B两相均为“0”状态时,变换器输出线电压为0,等效电路如图7所示,输出线电压和定子电流关系为

图7 换相瞬间输出线电压为0时NPC型三电平变换器的等效电路
(11)
3)A相处于“1”状态、C相处于“0”状态时,变换器输出线电压为1/2Vdc,等效电路如图8所示,输出线电压和定子电流关系为
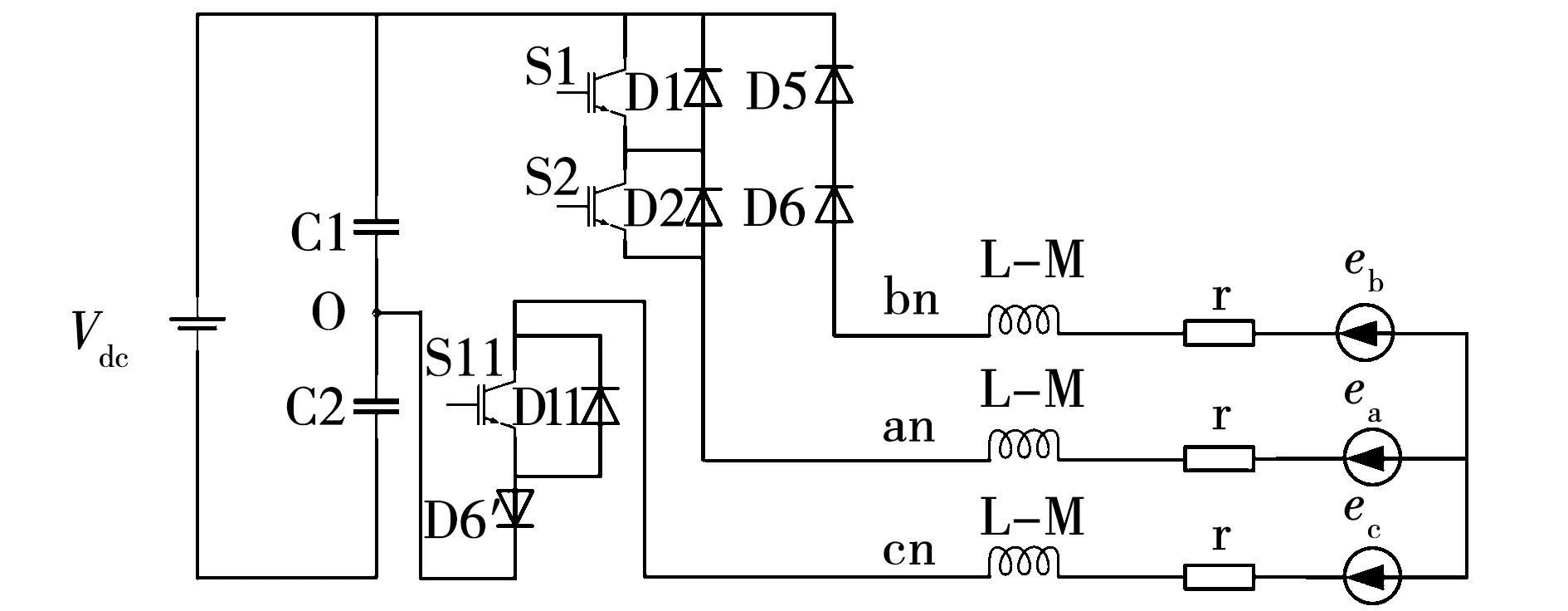
图8 换相瞬间输出电压为1/2Vdc时NPC型三电平变换器等效电路
(12)
2.2 中点电压平衡分析

1)电机导通相为“1”状态或“-1”状态:
(a)S1、S2导通且S5、S6导通,其他均关断,此时Vab=0;
(b)S1、S2导通且S7、S8导通,其他均关断,此时Vab=Vdc;
(c)S3、S4导通且S5、S6导通,其他均关断,此时Vab=-Vdc;
(d)S3、S4导通且S7、S8导通,其他均关断,此时Vab=0;
2)电机导通相均为“0”状态:
S2、S3导通且S6、S7导通,其他均关断,此时Vab=0;
3)电机导通相中,其中一相为“1”状态,另一相为“0”状态:
4)电机导通相中,其中一相为“-1”状态,另一相为“0”状态:
为避免三电平变换器中点电压不平衡导致输出波形畸变,应通过等效电压的合理选择来控制输出波形。上述分析可知,第1、2类工况对中点电压无影响,第3、4类工况对中点电压有较大影响。由于第3、4类工况均能在相电压上产生两种相反的电压,即在确定目标相电压后,可根据中点电压的偏离情况有目的的选择第3或第4类工况,从而控制中点电压趋向平衡。由于同步载波控制中,输出电平在每个开关周期内保持不变,因此该控制方式对中点电压有较大控制力,中点电压平衡情况较常用的SVPWM控制更好。
3 同步载波调制
高速磁悬浮飞轮储能驱动系统可分为加速过程和减速过程两个工作状态,以下将以加速过程为例,详细分析同步载波控制技术如何实现对飞轮储能驱动系统的控制,以及该方式对飞轮储能驱动系统性能的影响。
3.1 加速过程
飞轮储能驱动系统处于加速状态时,NPC型三电平变换器采用传统的PID控制作为顶层控制策略,驱动系统框图如图9所示。
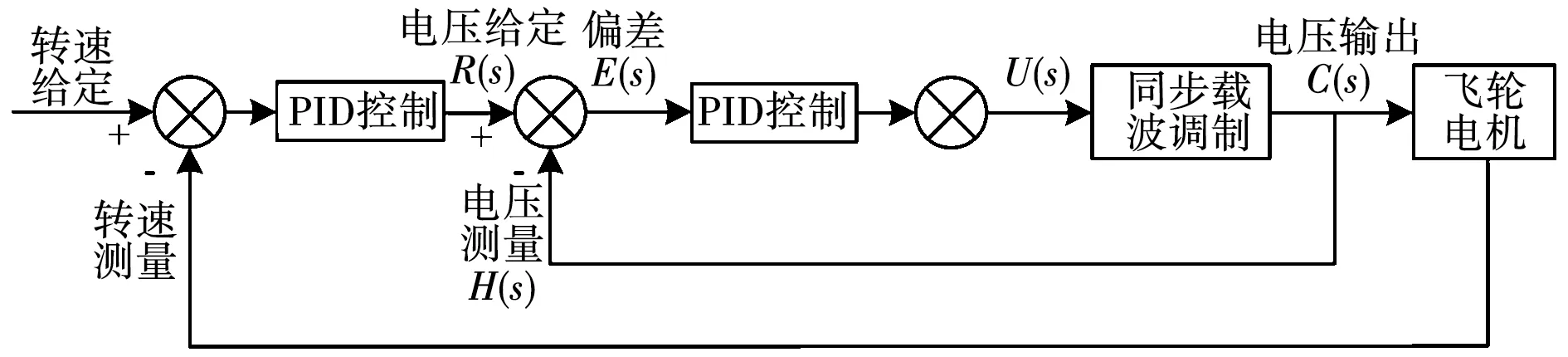
图9 驱动系统控制框图
利用优化的同步载波调制技术进行变换器输出电压的调制,即PWM周期与1/6转速周期同步,每1/6转速周期只发一个脉冲。该方法首先确定变换器的导通相,然后对输出电压进行调制。
3.1.1 确定变换器的导通相
在无刷直流电机中,将360°电角度平均划分为六个扇区,0°~60°为第1扇区,60°~120°为第2扇区,120°~180°为第3扇区,180°~240°为第4扇区,240°~300°为第5扇区,300°~360°为第6扇区,不同的扇区对应不同的导通相[24-25]。霍尔元件检测转子所在位置,同步载波控制方式控制转子所在扇区对应相IGBT的通断。处于加速过程的无刷直流电机中定子绕组电流可经式4、5、6变换得到:
(13)
由于同步载波控制时,霍尔元件的上升沿或下降沿超前空载相反电动势零点30°,为使绕组电流的基波与空载相反电动势同相位,无刷电机需要提前换相[26]。使绕组电流的基波与空载相反电动势同相位的每相电压超前角α与电机旋转角速度及定子电流的关系为:
(14)
其中ω为电机旋转角速度;Ke为反电动势系数。将式(13)代入式(14),可得每相电压与每相电压超前角之间的关系为:
(15)
3.1.2 开关次序控制



表1 ut≤1/2ud时IGBT导通状态表


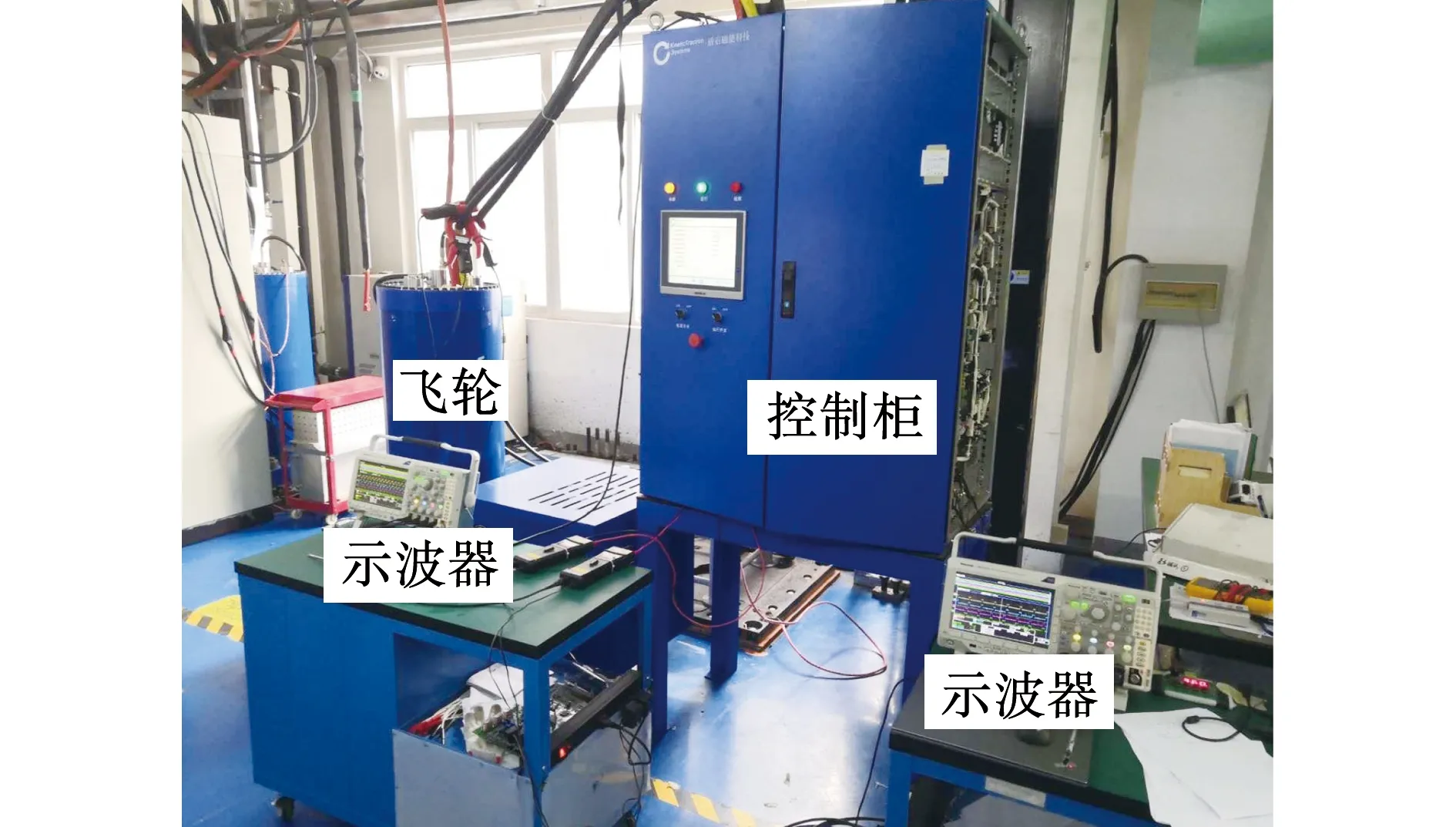
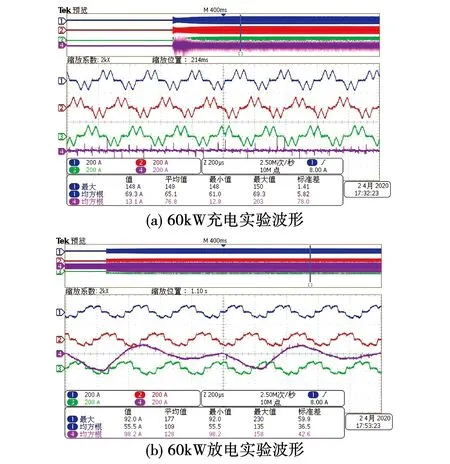
表2 1/2ud 由前文分析可知,两相导通模式下,一相为“±1”状态,另一相为“0”状态时,中点电压将产生偏移,此时同步载波调制方式为小矢量调制,无论哪一项处于“±1”状态,处于“0”状态的导通相总会有一个开关管为调制开关管,输出的偏移电压因此得到调制,有效解决了中点电压偏移问题。 3.1.3 开关频率优化 图10 PWM控制时序图 由上述分析可知,同步载波控制技术通过控制NPC型三电平逆变器的开关次序,实现了对输出电压的调制。此外,由于对调制信号进行了平移叠加,三电平逆变器的开关次数减少了50%,从而使开关损耗有效降低,因此同步载波控制技术能够从开关次序、开关损耗这两方面提高三电平逆变器的性能。 由式(2)可知,输出电压将影响无刷直流电机的转速,因此同步载波控制技术通过对输出电压进行调制,使输出波形的畸变率更小,有效提升了无刷直流电机驱动系统的稳定性,从而使飞轮储能驱动系统能够在大功率充放电工况下稳定运行。 3.1.4 转矩脉动 无刷直流电机定子绕组换流会产生转矩脉动,高速飞轮储能驱动系统的转矩与每相反电动势及相电流的关系为 Te=(eaia+ebib+ecic)/ω。 (16) 其中ω为无刷直流电机的角速度。由于同步载波控制技术只对输出电压和开关频率进行调制,不会改变三相无刷直流电机每相反电动势和相电流的大小,因此该控制技术不会扩大转矩脉动对高速飞轮储能驱动系统的影响。 飞轮储能驱动系统处于减速状态时,采用能量回馈制动[27],并要求:1)当飞轮处于稳定减速状态时,直流母线电压大于电机反电动势;2)由于飞轮储能系统处于能量回馈状态时,电机在高速运行状态,并且电机反电动势的电压和频率随着飞轮减速会产生较大变化,因此一般要求飞轮转速降至50%额定转速时仍能实现能量回馈。 无刷直流电机回馈制动控制方式仍为优化的同步载波控制,工作原理与多重交错boost工作原理相同,IGBT导通状态与加速状况下类似,在此不作赘述。 为验证基于NPC型三电平变换器的高速磁悬浮飞轮驱动系统的性能,设计了如图11所示的实物样机,在样机上进行了飞轮驱动系统性能测试。该实验平台包含控制柜、飞轮本体、示波器等,控制柜可实现飞轮本体的控制,示波器反映输出波形。实验选取60 kW与200 kW进行充放电测试,高速磁悬浮飞轮功率密度参数如表3所示。 表3 飞轮储能系统参数表 图11 高速磁悬浮飞轮系统样机 三电平飞轮驱动系统在60 kW下的充放电实验分别如图12(a)、图12(b)所示,图中通道1、2、3分别为A、B、C相的电流,通道4为直流电流。 图12 60 kW充放电实验波形 在200 kW下的充放电实验分别如图13(a)、图13(b)所示。 图13 200 kW下充放电实验波形 从图12、图13的充放电实验波形图中可知:充放电实验中三相电流波形均满足实际要求,且200 kW下的充放电波形的谐波比60 kW下的充放电波形的谐波含量更小,即充放电功率越大,A、B、C相电流波形越稳定;在NPC型三电平变换器的作用下,无刷直流电机的转速可达近40 000 r/min,高速磁悬浮飞轮储能系统可在200 kW下充放电时运行稳定。通道4表示的直流电流在放电实验中表现出交流特性,其原因是本次实验负载采用电阻型负载。 通过飞轮样机测试了所提出的高速磁悬浮飞轮储能系统在不同运行功率下的充放电效率,实验数据如表4所示。 表4 不同功率下样机充放电效率 由表4可知,高速磁悬浮飞轮储能系统的运行功率越大,充放电效率越高。 实验中,飞轮样机在额定200 kW下充放电时,转速与上下桥臂直流电压值的关系分别如图14、图15所示。 图14 充电时转速与上下桥臂直流电压实验数据拟合图 图15 放电时转速与上下桥臂直流电压实验数据拟合图 由飞轮样机在额定200 kW下充放电时,转速与上下桥臂直流电压关系得出以下结论:1)充电时直流母线电压总体呈下降趋势,能量储存在飞轮中;放电时直流母线电压总体呈上升趋势,飞轮释放能量;2)充放电过程中三电平变换器上下桥臂电压时刻保持平衡,未发生电压偏移现象。 本文构建了基于NPC型三电平变换器的高速磁悬浮飞轮驱动系统。通过对无刷直流电机建模,分析出飞轮驱动系统转速提升的方式,利用同步载波控制方式实现了对高速无刷直流电机的平稳控制,设计实物样机验证了所提方法的可行性。相比于一般的飞轮储能驱动系统,本文所提方法在转速和电压等级上均实现了较大提升,对飞轮储能系统在地铁等高压高速场合下的应用具有重要价值,具体为: 1)设计了基于常规1 700 V器件的NPC型变换器,提高了飞轮储能系统的电压等级,充放电过程中点电压时刻平衡,可安全运行在地铁1 500 V供电网络中; 2)提出了同步载波控制方法,实现了高速飞轮电机的加减速控制,优化了IGBT的开关损耗,使系统可稳定运行在额定1 500 V、40 000 r/min参数附近。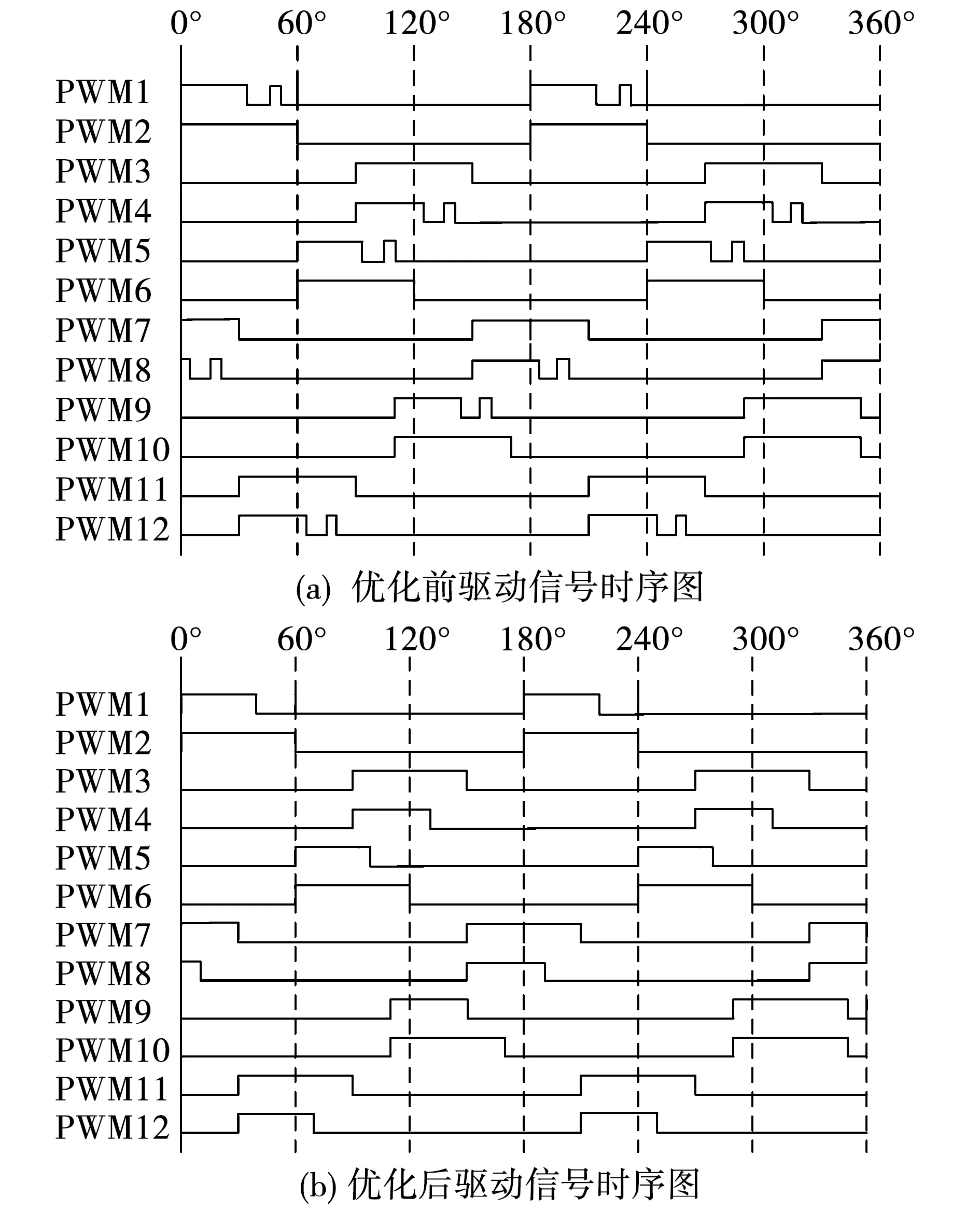
3.2 减速过程
4 实验结果





5 结 论
