某插电式混合动力公交客车离合器接合控制策略分析
2023-09-19李天闯
杨 昭,李天闯
某插电式混合动力公交客车离合器接合控制策略分析
杨 昭,李天闯
(陕西重型汽车有限公司,陕西 西安 710200)
在混合动力公交客车中,整车控制系统根据工况频繁切换车辆的驱动方式,而离合器就是驱动方式切换的一个重要部件,其工作品质决定着驱动系统的整体性能。文章通过对离合器的接合过程分析、结构建模,并对离合器接合品质的评价指标研究,建立模糊控制模型对离合器的接合过程进行控制。为实现降油耗目标,提出了在满足汽车行驶所需转矩的前提下,采用纯电动驱动,当电机输出转矩不能满足车辆行驶所需时,由电机输出额外转矩,带动发动机达到一定转速后喷油点火的模糊控制策略。在发动机点火后,使离合器主、从动盘处于滑磨状态,待到主、从动盘转速差较小的时候,快速接合,以达到减小冲击、提高乘坐舒适性。
混合动力公交客车;自动离合器;舒适性;模糊控制
随着汽车工业快速发展,汽车产销及保有量逐年增加,化石燃料短缺、大气污染加剧、排放法规升级,这些问题直接威胁内燃机汽车的可持续发展。因此,汽车要以清洁、环保、低油耗为发展方向。混合动力汽车是传统内燃机与纯电相结合的一种型式,可使汽车达到低能耗、低排放的目标。
混合动力公交客车使用工况具有行驶速度低、频繁起步、停车、加速、减速等特点,为达到节油目的,需要在电机单独驱动、发动机单独驱动及发动机和电动机共同驱动三种模式中不断切换,每次切换都需要离合器的分离和接合才能完成。接合过程的控制最为关键,既要平稳,冲击小,保证乘坐的舒适性,又要保证离合器的使用寿命(即起步的滑磨功要小),这就需要对自动离合器接合的最佳时机及规律进行研究[1]。
1 离合器结构与数学模型建立
离合器是汽车传动系统中与动力源直接相连的部件,主要作用是保证汽车平稳起步、换挡平顺、减轻齿轮啮合冲击、防止传动系统过载。膜片弹簧离合器由于转矩容量大、稳定、操纵轻便、结构简单且紧凑,目前被广泛使用[2]。
膜片弹簧离合器构造简图如图1所示,主要由膜片弹簧、主动盘、从动盘、离合器盖、分离轴承总成和分离叉臂构成[2]。

图1 膜片弹簧离合器构造简图
1.1 离合器接合过程分析
离合器的接合过程可分为四个阶段[3],如图2所示,c为离合器传递的摩擦力矩;e为主动盘转速;c为从动盘转速。
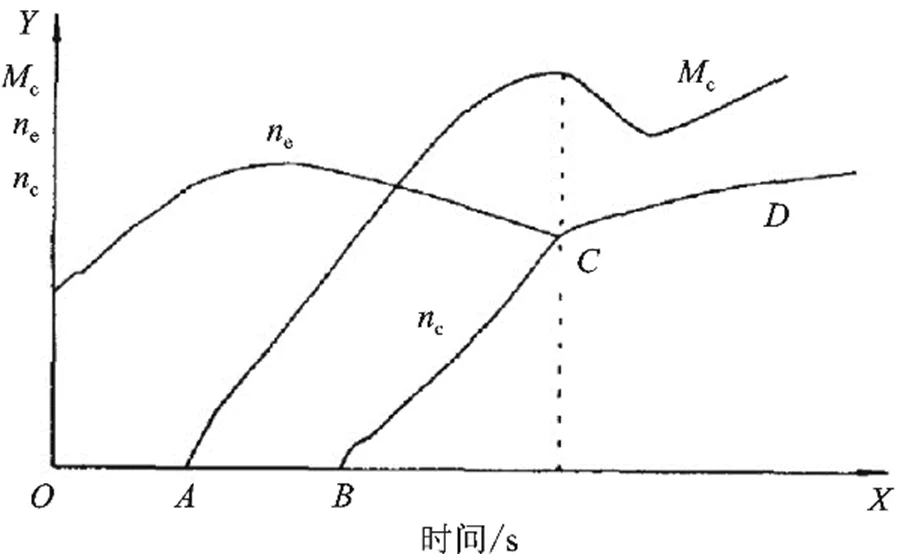
图2 离合器接合过程示意图
1)第一阶段(段):此阶段为消除空行程,无转矩传递,接合速度应尽可能快,以缩短接合时间;
2)第二阶段(段):离合器主、从动片产生滑磨,此阶段离合器传递的转矩不足以克服阻力矩,从减少滑磨功角度考虑,此阶段也要快速接合;
3)第三阶段(段):这一阶段离合器向从动盘传递的转矩超过了最大阻力矩。为实现平稳接合,此阶段应缓慢接合,但考虑到减少滑磨功,保护离合器,此阶段的接合速度又不能太慢,应合理选取接合速度[4];
4)第四阶段(段):离合器的主、从动盘转速基本实现同步,此阶段的接合速度对冲击度和滑磨功的影响较小,应快速接合[5]。
由上述分析可知,为达到减少冲击度的同时减少滑磨功,离合器接合过程应遵循“快-慢-快”原则进行接合控制。
1.2 离合器接合评价标准
离合器接合的质量是以平稳性和使用寿命来评价的,即通过冲击度和比滑磨功来度量[6-7]。
1.2.1冲击度
冲击度即车辆纵向加速度对时间的变化量,用表示。
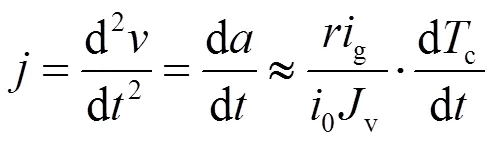
式中,g为变速器传动比;0为传动系主减速比;为车轮滚动半径;v为与变速器输出轴刚性连接的整车质量转换至输出轴的当量惯量;c为离合器传递的摩擦力矩,c=(2),其中2为离合器位移。
1.2.2比滑磨功
比滑磨功描述的是离合器单位面积摩擦盘之间滑动摩擦力做功的大小,数学表达式为

式中,1为从离合器主、从动盘开始接触(c=0)起直到c逐渐增大到能够克服阻力矩这一过程所经历的时间;2为从c大于阻力矩时离合器从动盘角速度由零开始转动起,直到c逐渐增大到离合器主动盘转速e相等所经历的时间;e为离合器压盘转速;c为离合器从动盘转速。滑磨功还与道路阻力矩有关,道路阻力矩越大产生的比滑磨功越大。
1.3 离合器接合过程的动力学描述
离合器接合的动力学模型整车结构如图3所示。图3中离合器1连接发动机与电机,切断与传输发动机的动力;离合器2连接电机与变速箱,控制电机输出的动力传输。
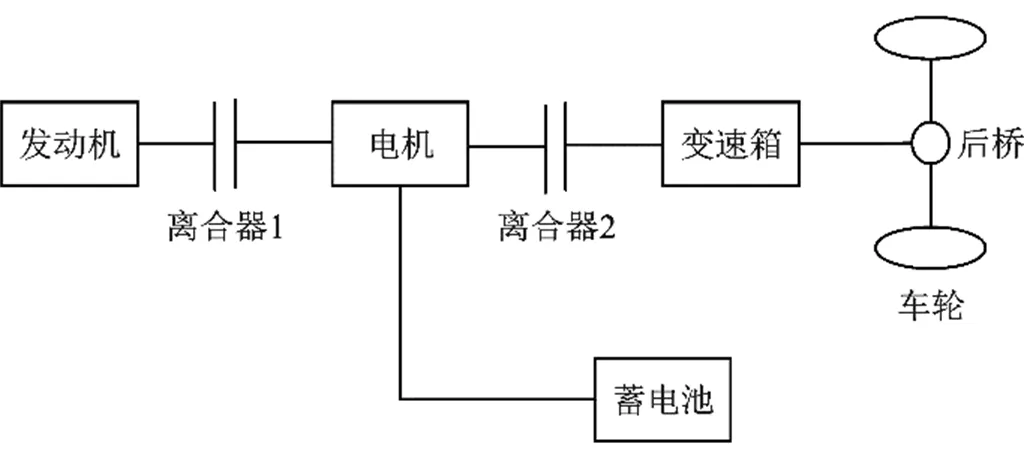
图3 整车结构简图
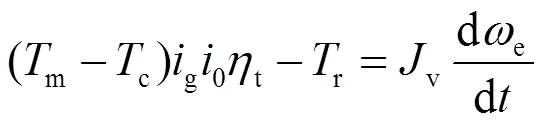
汽车的行驶需求转矩小于电机的输出转矩且电池荷电状态(State Of Charge, SOC)大于最低限值(即无需充电)时,汽车处于纯电动驱动工况;当汽车的需求转矩大于电机的输出转矩时,驱动模式由纯电动驱动向发动机驱动切换,自动离合器1开始接合,此时电机输出额外转矩c,通过自动离合器1带动发动机曲轴转动,该过程动力学方程[8]为

式中,c为离合器1传递的摩擦力矩;e1为发动机阻力矩;e为发动机飞轮转动惯量;1为电机转子转动惯量;2为离合器从动盘转动惯量;e为离合器从动盘转速。
在自动离合器接合过程,当发动机转速传感器检测到曲轴转速大于900 r/min时,电子控制单元(Electronic Control Unit, ECU)发出发动机点火信号,发动机点火,此时发动机有转矩输出,但此时离合器主、从动盘的转速尚未达到同步,离合器仍然传递转矩,此时发动机输出的转矩和离合器传递的转矩共同带动离合器从动盘转动,该过程的动力学方程为

式中,e2为发动机输出转矩。
在自动离合器接合过程中,对离合器主动盘进行受力分析如下:
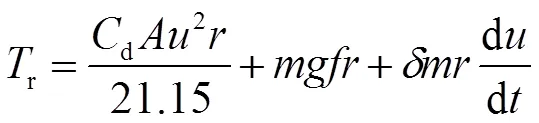
式中,t为驱动轮角速度,rad/s;r为汽车行驶阻力矩,N·m;d为汽车风阻系数;为迎风面积,m2;为汽车行驶速度,km/h;为汽车质量,kg;为车轮滚动半径,m;为汽车旋转质量换算系数;为滚动阻力系数;v为与离合器输出轴相连的转动惯量,kg·m2。
此时,电动机转动角速度m与车轮转动角速度t的关系为
m=g0t(7)
2 自动离合器控制策略研究
模糊控制是一种面向未来的新型智能控制技术,能够模仿人工活动在人脑中的模糊概念和成功的控制策略,运用模糊数学,可将人工控制策略用计算机去实现[9]。
2.1 模糊控制的概念与特点
模糊控制是建立在人工经验基础上的一种控制算法,是把熟练操作人员的实践经验加以总结和描述,并以通用语言表达出来,形成一种定性的、不精确的控制规则,用模糊集理论将其量化转化为模糊控制算法,从而形成模糊控制理论[9]。
模糊控制系统的核心是模糊控制器,这也是模糊控制系统区别于其他控制系统的主要标志[9]。模糊控制器的结构如图4所示,从功能上划分,它主要由模糊化、模糊推理、模糊精确化、知识库[10]四个部分组成。

图4 模糊控制器
2.2 模糊系统的建立
本文将离合器接合过程中主、从动盘转速差Δ和驾驶员油门踏板开度作为模糊控制器的输入量,离合器的位移作为输出量。模糊控制模型表示依据驾驶员的意图来实现离合器的自动接合。油门踏板开度大,说明汽车需要的驱动转矩大,离合器应尽快接合,反之应较慢接合。主、从动盘转速差大,快速接合则冲击度大,所以在主、从动盘转速较大时,应缓慢接合,随着主、从动盘转速差的缩小,离合器的接合位移应加大,当二者接近同步时,离合器快速接合。由于离合器分离阶段对冲击度影响很小,可以快速分离,由离合器ECU发出控制信号断开。
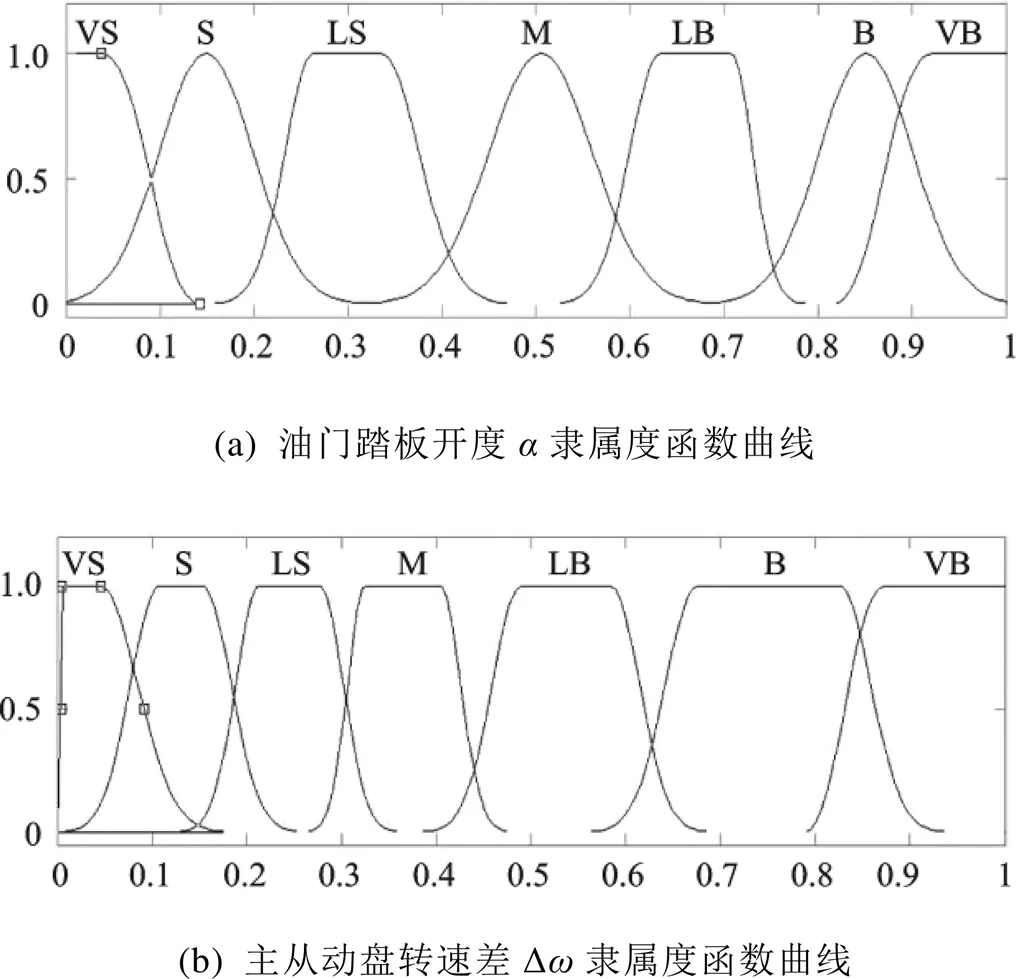
将离合器主、从动盘转速差Δ和油门踏板开度的模糊语言变量划分为{很小(VS),小(S),较小(LS),中等(M),较大(LB),大(B),非常大(VB)};模糊论域为{0,0.1,0.2,0.3,0.4,0.5, 0.6,0.7,0.8,0.9,1}。离合器位移的模糊语言变量为{很小(VS),小(S),中等(M),大(B),很大(VB)};模糊论域为{0,0.1,0.2,0.3,0.4,0.5,0.6,0.7, 0.8,0.9,1}。离合器接合过程中油门踏板开度主从动盘转速差Δ和离合器位移的隶属度函数如图5所示。
根据输入输出的语言变量的数目,共建立了49条控制规则,离合器的模糊控制规则如表1所示;主、从动盘转速差Δ、油门踏板开度和离合器位移的模糊控制规则插值表如图6所示。
表1 离合器位移模糊控制规则表
模糊语言变量VSSLSMLBBVB VSBBBBBBB SMMMBSBBB LSMMBMBBBS MMMMMBSBSBS LBMMSMMBSM BLSLSLSLSMMLS VBSSLSLSLSLSLS
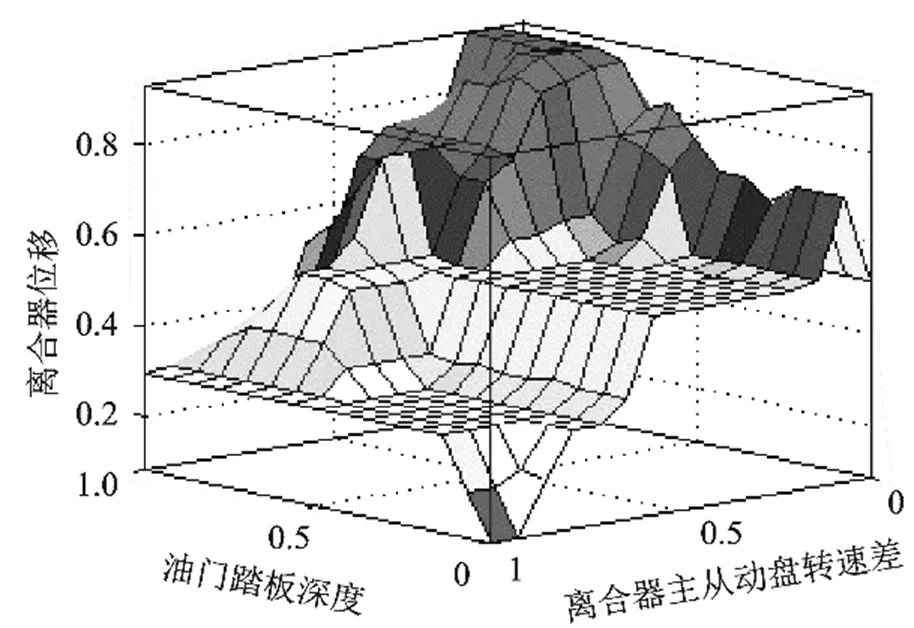
图6 模糊控制规则插值表
2.3 离合器状态判断
在离合器的工作过程中,离合器的状态有断开状态、滑磨状态和接合状态三种。接合以前,离合器处于分离状态;开始接合到离合器主、从动盘转速达到同步之前,离合器都处于滑磨状态;同步之后接合成为接合状态。离合器状态的判断在控制策略的制定上尤为重要。在本控制策略中,离合器状态的判断条件见式(8)-式(10);接合状态离合器状态逻辑判断框图如图7所示。
断开状态:
e-m<0且e=0 (8)
滑磨状态:
e-m<0.01×60/2π且e>0 (9)
接合状态:
e-m≥0.01×60/2π (10)
式中,e为发动机转速,r/min;m为电机转速,r/min。
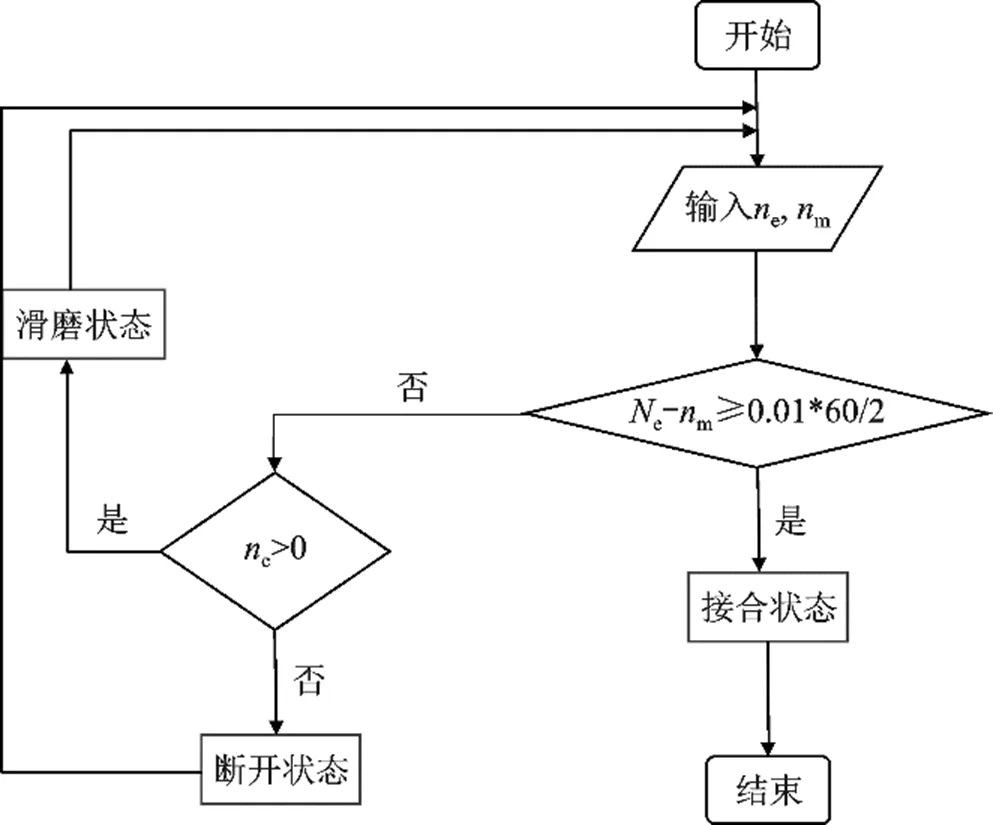
图7 离合器状态逻辑框图
2.4 驱动模式切换
混合动力公交客车的驱动方式有纯电动驱动,发动机驱动和发动机、电机混合驱动,整车控制系统根据不同的工况要求选择不同的驱动模式。为了达到节省燃油、降低排放的目的,在发动机转速低于900 r/min和整车需求转矩不大的情况下由电机驱动,当需求转矩大于由整车控制策略制定的电机转矩输出界限时,由电机输出额外转矩,离合器带动发动机转动;当发动机转速大于900 r/min时,发动机喷油点火,此时在保证需求转矩的前提下,电机输出转矩逐渐减小,当离合器主、从动盘转速达到同步时,电机关闭,完成从纯电动驱动到发动机驱动的切换。当发动机输出的最大转矩也无法满足整车需求转矩时,电机再次启动,完成发动机驱动模式到混合驱动模式的切换。
3 结论
本文分析了膜片弹簧离合器结构、工作原理以及膜片弹簧特性,建立了离合器的数学模型和膜片弹簧的力学模型,提出了在电机转矩不足时,通过电机带动发动机达到一定转速后发动机点火切换动力驱动模式,并采用模糊控制理论设计了控制策略,对自动离合器的切换及切换过程进行控制,以达到降低油耗及提高换挡舒适性的目的。
[1] 张雄华.混合动力汽车电控离合器系统开发与研究[D].大连:大连理工大学,2005.
[2] 陈家瑞,马天飞.汽车构造[M].7版.北京:人民交通大学出版社,2021.
[3] 张雄华,周雅夫,宋振寰.电机驱动是自动离合器控制与实验[J].天津汽车,2005(1):29-32.
[4] 王斐.摩擦系数对AMT起步的影响研究[D].重庆:重庆大学,2013.
[5] 单外平,李翔晟,叶文.基于可变力轨迹AMT离合器结合品质的研究[J].机械传动, 2018,42(11):40-45.
[6] 陈涛.HEV节能离合器执行机构动态特性的仿真研究[D].长春:吉林大学,2007.
[7] 余世明,孙超.插电式混合动力汽车离合器控制方法及仿真研究[J].浙江工业大学学报,2017,45(3):305- 309.
[8] 胡建军,李光辉,伍国强,等.汽车起步过程离合器传递转矩精确计算分析[J].汽车工程,2008,30(12):1083- 1086.
[9] 张铭均.智能控制技术[M].哈尔滨:哈尔滨工程大学出版社,2006.
[10] 张曾科.模糊数学在自动化技术中的应用[M].北京:清华大学出版社,1997.
Analysis of Clutch Engagement Control Strategy of a Plug-in Hybrid Electric Bus
YANG Zhao, LI Tianchuang
( Shaanxi Heavy Duty Automobile Company Limited, Xi'an 710200, China )
In the hybrid electric bus, the vehicle control system frequently switches the driving mode of the vehicle according to the working conditions, and the clutch is an important component of the drive mode switching, and its working quality determines the overall performance of the drive system. In this paper, a fuzzy control model is established to control the engagement process of clutch by analyzing and modeling the structure of the clutch and studying the evaluation index of the clutch bonding quality.In order to achieve the goal of reducing fuel consumption of hybrid electric vehicles, it is proposed to use pure electric drive on the premise of meeting the torque required for driving the vehicle. When the output torque of the motor cannot meet the driving requirements of the vehicle, the motor outputs additional torque to drive the engine. The control strategy of fuel injection ignition after reaching a certain speed. After the engine is ignited, the main and driven discs of the clutch are in a sliding state, and when the speed difference between the main and driven discs is small, they are quickly engaged to reduce impact and improve ride comfort.
Hybrid electric bus;Automatic clutch;Comfortability;Fuzzy control
U469.7
A
1671-7988(2023)17-119-05
10.16638/j.cnki.1671-7988.2023.017.021
杨昭(1989-),男,工程师,研究方向为新能源汽车,E-mail:yangzhao@sxqc.com。