基于LQR的商用货车防侧翻预警策略研究
2023-09-19陈鹏辉许振华
茹 强,张 博,陈鹏辉,许振华
基于LQR的商用货车防侧翻预警策略研究
茹 强,张 博,陈鹏辉,许振华
(比亚迪汽车有限公司,陕西 西安 710119)
随着交通运输行业的快速发展,商用货车的侧翻稳定性愈来愈受到关注。文章以商用货车的横摆角速度、侧向速度变化为控制变量,结合关于侧翻预警时间(TTR)的侧翻预警理论和商用货车侧翻车辆模型进行预警策略设计,并通过卡尔曼滤波估计器预测车辆侧向加速度进而计算出侧翻门限值,之后根据整车线性模型通过二次线性调节器得到最优附加横摆力矩。由单侧车轮控制策略对所建立的模型进行防侧翻控制;最后通过极端工况对策略的可靠性进行了仿真测试,从而验证文章所采用控制策略的有效性。
商用货车;侧翻预警;稳定性控制策略;单侧车轮制动
商用货车在交通运输行业起着至关重要的作用,然而由于整车长度较长、质心高等结构特点,驾驶员在驾驶过程中只能依靠自己的经验和驾驶技能来操纵车辆,这给商用货车的转弯和变道过程带来了很大的不确定性,对车辆以及驾驶人都构成了重大的安全威胁。因此,为了使货车在运输过程中更安全,需要控制其行驶过程中的稳定性。本文对商用货车的稳定性,特别是在提高其防侧翻能力方面进行了深入研究,并制定了相应的控制策略,旨在提高商用货车的驾驶安全性,实现安全运输的目标。
1 侧翻预警的概念
侧翻预警时常采用货车横向侧翻模型来预测车轮的参数响应,将当前车辆各相关参数设为初始状态,选定步长为时刻来预测模型侧翻相关的指标,这种方法即为侧翻预警时间(Time to Rollover, TTR)预警算法[1]。若货车发生侧翻后,真实的TTR可以被反推得出。TTR算法的工作示意见图1。
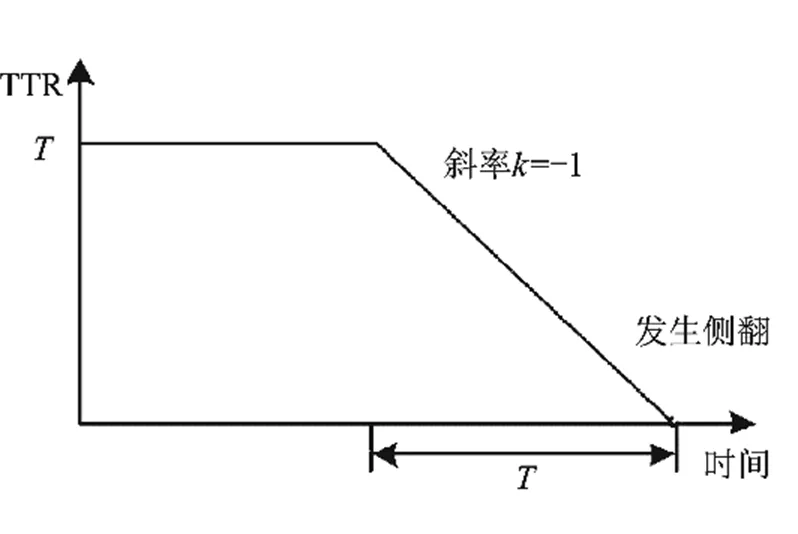
图1 侧翻预警概念示意图
当预测值越过设定的侧倾角临界值后,货车就有极大可能会在此刻发生侧翻。如图1所示,从货车发生侧翻的那一时刻起沿着值与时间的关系(图中斜率为-1的直线)进行反向推导,并将危险发生之前的一个时刻当作“真实值”[2]。在实际应用中,一般取0.2 s或0.3 s。通过上述方法,如果能通过一种策略将真实的TTR值进行实时的预测和重构,就能够准确描述和反映商用货车发生侧翻的危险程度[3]。
构造TTR预警算法步骤,首先预测当前商用货车行驶过程中的真实状态参数响应,并把当前计算得到的参数值作为状态初始值,开始时设置为0(制定计算步长为);通过模型算出此时的侧翻指标,将侧翻判定阈值设置为秒,当某一时间的侧翻指标在阈值时间内等于或超过设定的侧翻条件时,就输出对应的步数,进而通过步数和单步时间而计算出预警时间,若在设定阈值的时间内发生侧翻条件一直不满足则本轮计算停止,系统认定此时发生侧翻概率不大。在TTR预警概念中,值越小就表明汽车发生侧翻概率越大;当为0时表示商用货车正在侧翻风险中[4]。
2 侧翻车辆模型
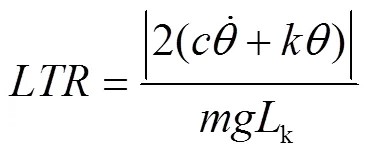
TTR侧翻指标参量很多,如横向载荷转移率(Lateral load Transfer Rate, LTR)、侧翻防止能量储备(Rollover Prevention Energy Reserve, RPER)、侧倾安全系数(Roll Safety Factor, RSF)。在本文中即采用(即横向载荷转移情况)作为侧翻预警的门限值。可以简单定义为车轮垂直载荷之差与垂直载荷之和的比值[5]。以作为算法的门限值存在很多好处,譬如对于不同类型汽车而言只要考虑车轮受力情况。不同汽车的侧翻预警阈值差异不大,用做门限值的策略算法具有良好的普适性。
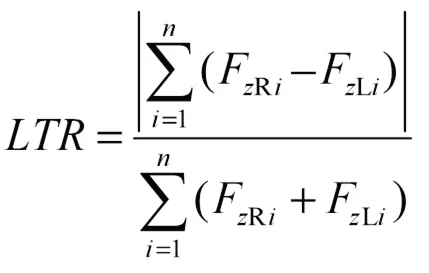
式中,FRi为右边车轮受到的垂直载荷;FLi为左边车轮受到的垂直载荷;为车轴的位置;为车轴数量。
左右轮胎受到的垂直载荷会在整车发生侧倾时产生横向转移,所以通过式(1)算出的通常都在0到1之间。当结果为0时,汽车没有发生侧倾,轮胎受到的载荷也没有发生偏移;当任意一侧车辆离开地面,所计算出的也将等于1,即车辆很有可能在此刻发生侧翻。因此,不管对于何种汽车都能够通过判断绝对值的大小来推测此时是否有车轮离开地面,由此得出汽车是否即将发生侧翻。
由于汽车行驶过程中左右车轮的载荷时刻可能发生变化,难以测量,因此,也就很难使用左右车轮受到的载荷来预测之后的值。为此本文在构建汽车侧翻预警算法时会将指标的计算变换为线性,根据模型计算的系统输出对应的值。
汽车发生侧倾时,其受力如图2所示。
根据图2分析可得
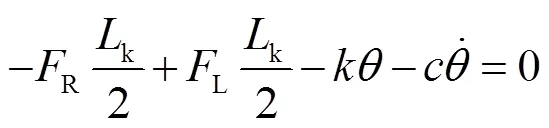

由此可得
式中,m为整车质量;g为重力加速度。
本文制定的TTR防侧翻策略如图3所示。首先由防侧翻系统根据转向盘转角值和此时的车速计算出当前的状态变量值,再根据商用货车侧翻模型计算值,并与预设的门限值进行比较。若小于门限值则判定在=×不会发生侧翻,否则继续进行下一步长的判断。
由于上文构建的商用货车侧翻模型做了相应简化,为了使其更贴合车辆运行过程中实际表现,其使用到的侧偏角与变化率可以使用卡尔曼滤波方法来估计和预测。
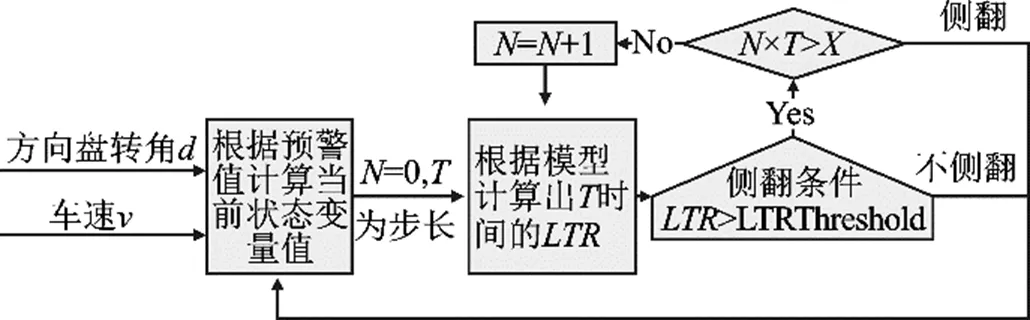
图3 防侧翻控制策略
将侧向加速度a(通过传感器实际测量得到)作为观测量,同时由于侧翻模型中需轴力矩保持平衡,则可将系统测量式写为
式中,为质心到侧倾轴距离;为系统观测误差。
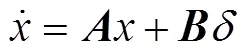
状态方程可以写为

式中,为过程误差;为状态转移矩阵;为当前状态;-1为上一时刻状态。
Kalman状态估计器原理如图4所示。
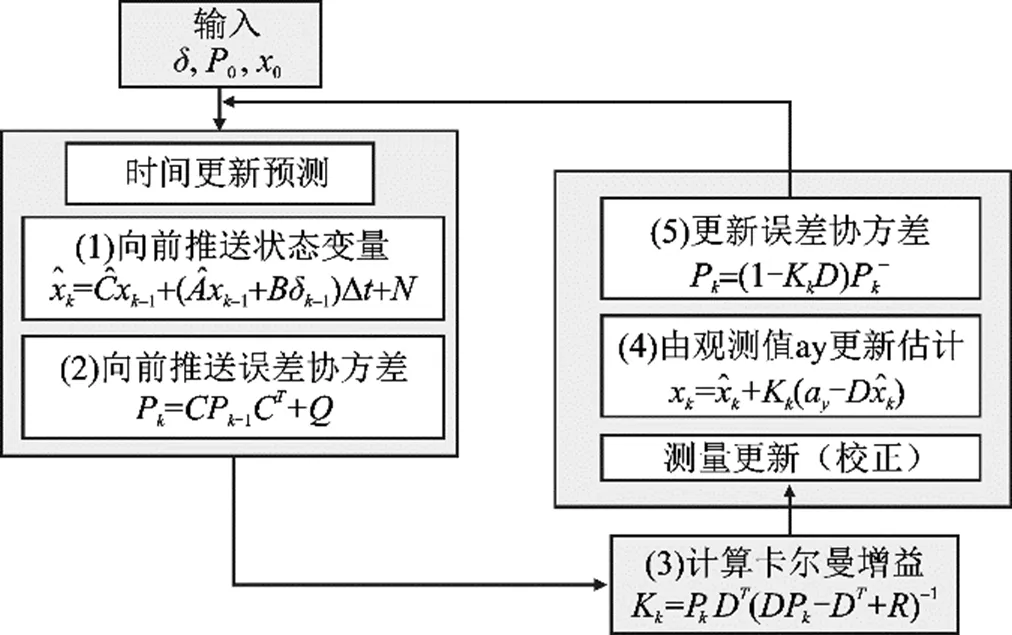
图4 卡尔曼滤波估计器原理
3 LQR的附加横摆力矩的最优决策
二次线性调节器(Linear Quadratic Regulator, LQR)控制是采用状态线性反馈寻取最优解的办法,其控制策略计算出的最优决策可用于小信号条件下的非线性工程实践中,二次线性调节器容易设计和实现。本文即采用LQR控制寻求防止侧翻的最优控制扭矩。

通过对施加力矩前后进行对比可得其对车辆动态参数的影响如式(7)所示:

由式(7)可得附加横摆力矩最优解的问题可以通过附加力矩的方式转换为线性,通过LQR状态调节器处理,显然在线性方程中存在唯一的最优解:

其中()是黎卡提方程的唯一解:
其最优性能指标为

4 单侧车轮制动策略
本文采用单侧制动理论对商用货车进行稳定性调节,旨在能够避免商用货车发生侧翻。商用货车采用单侧制动的方案,能使制动力分配到有效的车轮之上;若另一侧车轮被施加了计算所得的制动力,则货车的车轮可能会因此而抱死失去转向能力或者发生侧滑甚至侧翻。若相应的方案在半挂货车上使用得当,其牵引车和后面连接的挂车在转弯时的方向一致性会更好。
本文主要通过识别计算得到的附加横摆力矩最优解的符号(正或负)来附加力施加在哪一侧的车轮之上,并结合比例-积分-微分(Proportional Integral Derivative, PID)调节器结合转速与侧倾角对附加制动力进行相应的优化调节,从而使得汽车的滑移率能够稳定保存在最佳范围区间内,具体策略如图5所示[7]。
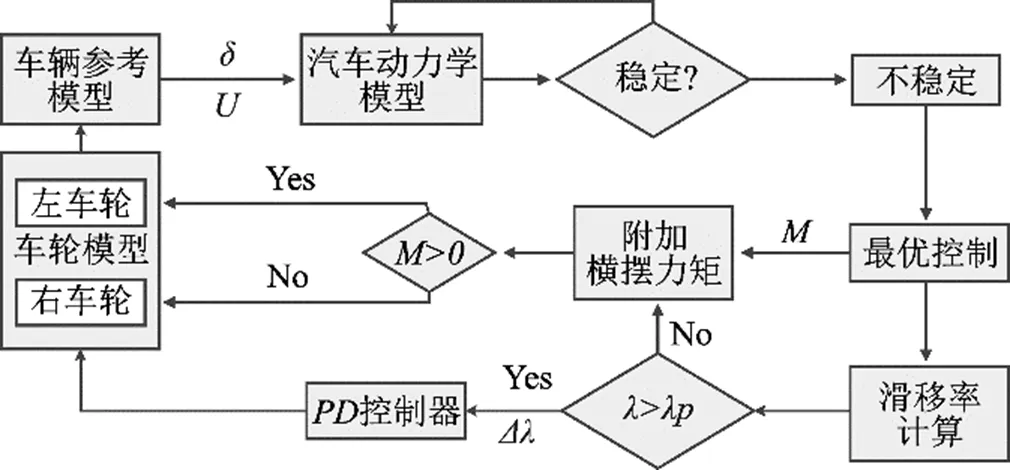
图5 单侧车轮制动策略
为了验证防侧翻策略,实验设计为易于发生侧翻的鱼钩工况(动态翻滚测试:转向角快速逆转的剧烈的转向操作),方向盘输入如图6所示,车速控制在80 km/h。
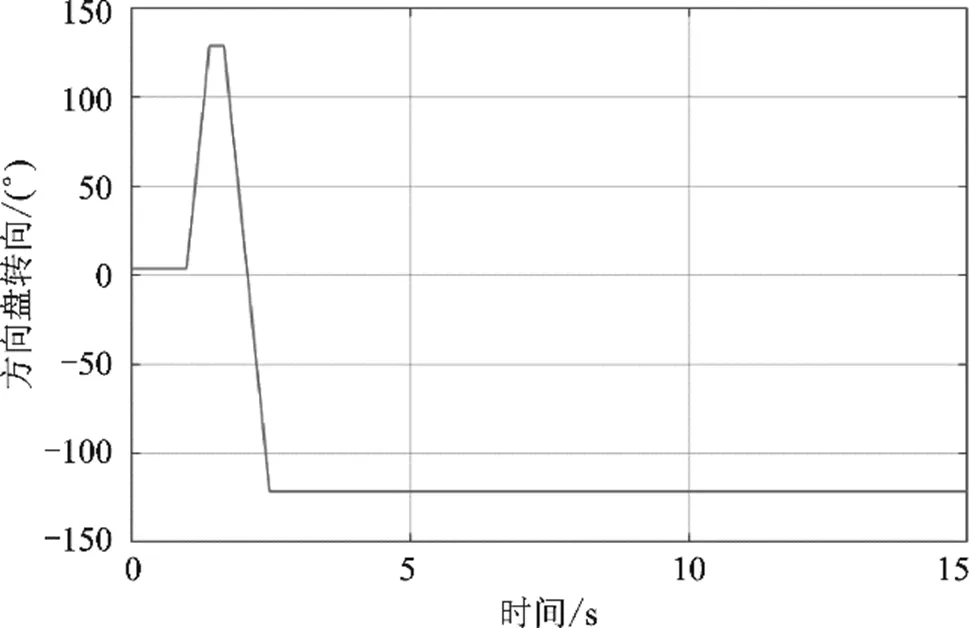
图6 侧翻预警验证试验方向盘转角
图7为TTR防侧翻预警后得到的信号曲线,0代表没有侧翻危险,1代表存在侧翻危险。因此,单侧车轮制动策略主要施加在有侧翻危险的时刻。
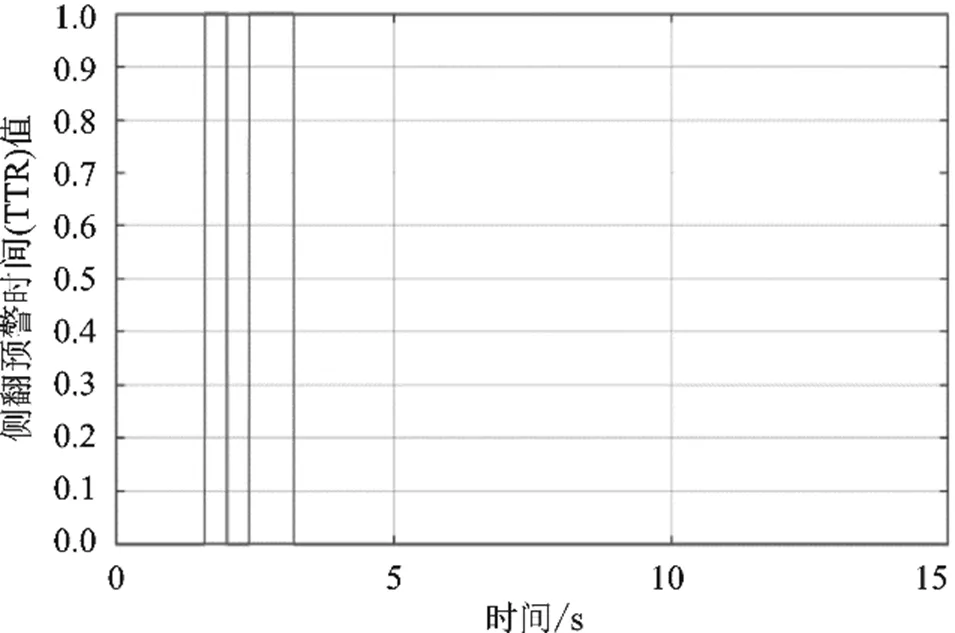
图7 侧翻危险
在有侧翻危险时,对车辆有效轮要施加一定的力,图8为经过PID调节器控制后的制动力矩随时间变化的曲线图。
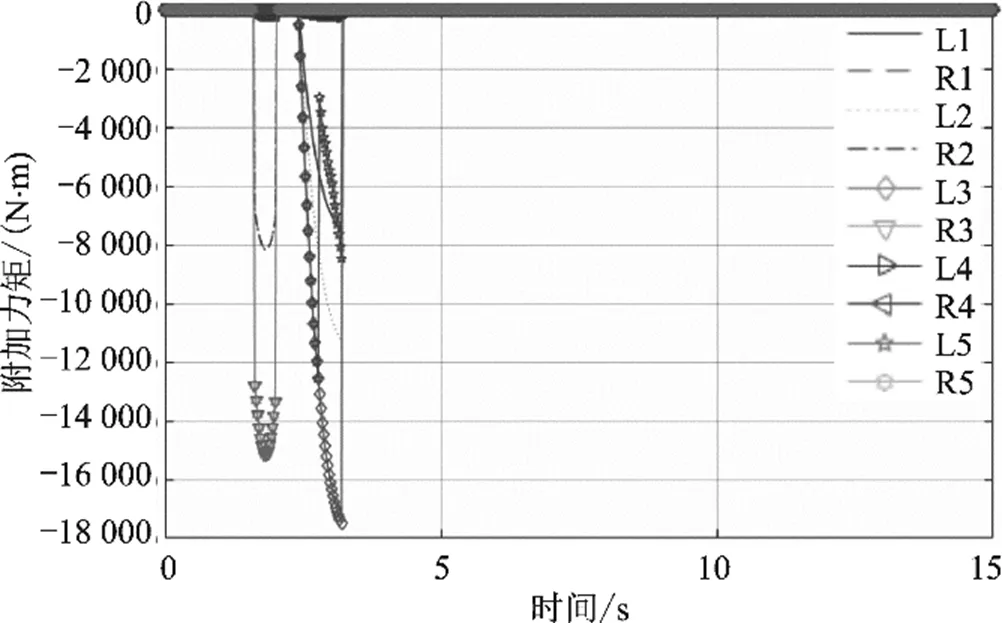
图8 各有效轮上施加的制动力矩
为了体现实验效果,本文添加了一组对照实验,对照组实验所行驶的路况和策略组相同,方向盘输入相同,不同之处在于对照组没有施加防侧翻策略,策略组施加了如图8所示的制动力矩。由此所得到的对照组与策略组的侧向加速度如图9所示。
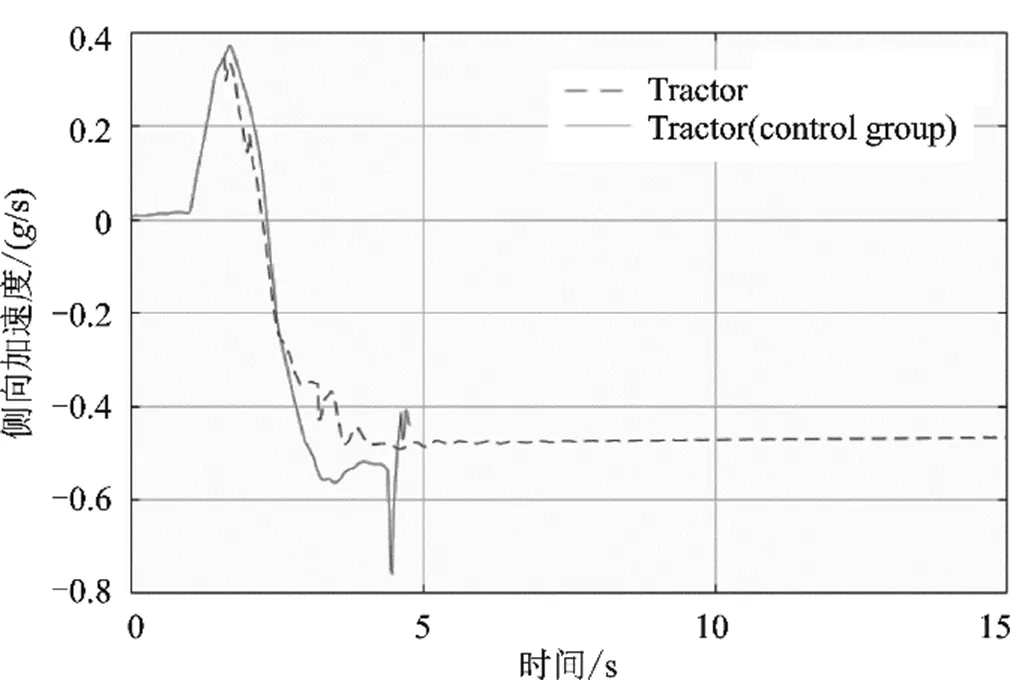
图9 侧向加速度
在对照组(control group)未使用防侧翻控制策略时,汽车在5 s前发生侧翻,而策略在实验的过程中未发生侧翻,且侧向加速度相对有所降低
5 总结
本文通过对商用货车进行分析,根据汽车运行情况通过侧翻模型构建商用货车侧向预警策略,并通过对LTR指标分析侧翻工况,然后再根据线性模型运用状态调节器的知识得出了商用货车所需的最佳横摆力矩,并通过单边控制的方法对侧翻时刻的车辆进行修正,通过易于使商用货车发生侧翻的鱼钩工况仿真试验验证可以看出本文策略对于提升商用货车防侧翻能力确实有着重要的影响。
[1] 于志新,宗长富,何磊,等.基于TTR预警的重型车辆防侧翻控制算法[J].吉林大学学报(工学版),2009,39 (S2):251-254.
[2] 金智林,翁建生,胡海岩.汽车侧翻预警及防侧翻控制[J].动力学与控制学报,2007(4):365-369.
[3] 欧健,王永胜,杨鄂川,等.半挂汽车TTR预警及防侧翻控制[J].重庆大学学报,2017,40(6):67-76.
[4] 茹强.双挂汽车列车稳定性控制策略研究[D].西安:长安大学,2019.
[5] 成光华.基于TTR的汽车侧翻预警器设计[D].南京:南京航空航天大学,2009.
[6] KATSUHIKO O.现代控制工程[M].北京:电子工业出版社,2011.
[7] EISELE D D,PENG H.Vehicle Dynamics Control with Rollover Prevention for Articulated Heavy Trucks[J]. South China Journal of Preventive Medicine,2014.
Research on Rollover Prevention Warning Strategy for Commercial Trucks Based on LQR
RU Qiang, ZHANG Bo, CHEN Penghui, XU Zhenhua
( BYD Automobile Company Limited, Xi'an 710119, China )
With the rapid development of the transportation industry, the rollover stability of commercial trucks is receiving increasing attention. This paper takes the yaw rate and lateral velocity variation of commercial trucks as control variables, combines the TTR rollover warning theory and the rollover vehicle model of commercial trucks to design the warning strategy, predicts the vehicle lateral acceleration through the Kalman filter estimator, and then calculates the rollover threshold value, and then obtains the optimal additional yaw moment through the linear quadratic regulator regulator according to the vehicle linear model. Using a single wheel control strategy, perform anti roll control on the established model. The reliability of the strategy is simulated and tested through extreme operating conditions to verify the effectiveness of the control strategy adopted in this paper.
Commercial trucks; Rollover warning; Stability control strategy; Single wheel braking
U469.2
A
1671-7988(2023)17-76-05
10.16638/j.cnki.1671-7988.2023.017.013
茹强(1992-),男,硕士,工程师,研究方向为电动汽车软件开发,E-mail:rqfast@126.com。