基于反电动势的表贴式永磁同步电机位置传感器故障诊断研究
2023-09-19徐克杰董小旭李耀强何文靖祁韦栋张曦月
徐克杰,董小旭,李耀强,陈 勇,李 菁,何文靖,祁韦栋,巩 杰,张曦月
基于反电动势的表贴式永磁同步电机位置传感器故障诊断研究
徐克杰1,董小旭2,李耀强2,陈 勇3,李 菁2,何文靖2,祁韦栋2,巩 杰2,张曦月2
(1.长安大学 汽车学院,陕西 西安 710064;2.宝鸡吉利汽车部件有限公司,陕西 宝鸡 721306; 3.贵州省交通科学研究院股份有限公司,贵州 贵阳 550008)
永磁同步电机驱动系统中转子位置的获取至关重要,影响着系统运行安全与稳定性。其位置传感器常常因为工作环境较为恶劣,信号间的不匹配等原因产生故障,无法为驱动控制系统提供有效的转子位置信息。文章基于直接转矩控制的控制方法,构建了一种基于反电动势的滑膜观测器,用做表贴式永磁同步电机故障诊断。通过合理的滑膜增益值与切换函数构建滑模观测器,通过反正切函数提取转子位置信息,并在MATLAB/Simulink中搭建仿真模型进行验证。
表贴式永磁同步电机;反电动势;转子位置估计;故障诊断
永磁同步电机矢量控制、直接转矩控制等驱动控制方法都需要获取转子位置与转速信息来满足控制系统需求,保证电机控制系统正常运行。现有永磁同步电机驱动控制系统一般使用位置传感器,如编码器、旋转变压器等测量转子信息,但是该方法受限于传感器工作环境等原因限制,易发生损坏,影响运行稳定。
永磁同步电机的位置传感器时刻影响着电机的高效运行,因此针对位置传感器的故障诊断尤为重要。现阶段针对位置传感器的故障诊断技术可分为基于模型、数据驱动以及经验知识。文献[1]提出了一种改进的滑膜观测器,通过改变滑膜控制率,对电流补偿等方法估计转子位置,但其相位补偿未从电机数学模型出发因此控制性能有待提高;文献[2]通过改变在零点处的切换函数状态,减小抖振现象,但是其算法实现较为困难,在滑膜控制器后通过增加滤波器[3-4]或者卡尔曼滤波均可一定程度减小抖振现象;文献[5]首先分析了位置传感器故障下基于直接转矩控制方法的电机状态变化,之后基于故障信号实现了故障的定位与识别,但是其未研究故障发生后电机运行状况;文献[6]提出了一种高阶滑膜观测器进行转子位置估计,通过观测器实现了位置传感器的故障诊断。
基于模型的故障诊断愈加成熟,其关键在于观测器的构建以及对参数预估的准确性。针对电机运行低速以及中高速度段均有不同的控制算法对位置信息进行估计进而实现故障诊断,如高频信号注入、磁链观测等方法。本文提出了一种滑膜观测器控制方法能够在特定工况下实现位置传感器的故障诊断。
1 永磁同步电机驱动控制系统
永磁同步电机直接转矩控制,算法实现简单、控制响应快[7]。直接转矩控制通过滞环比较器,分别对比转矩与磁链的给定值与系统反馈值,得出逆变器工作状态,进而实现对转矩与磁链的控制,保证电机运行[8]。本文提到的滑膜观测器依赖直接转矩的控制方法,通过滞环比较器、逆变器、电流传感器以及合理设置观测器所需要的积分初值、坐标变换实现该驱动控制系统。
依据永磁同步电机中永磁体位置的不同可将永磁同步电机分为表贴式永磁同步电机和内置式永磁同步电机,其中表贴式永磁同步电机内部气隙磁场均匀且永磁体磁导率与空气磁导率近似[9-10],所以表贴式永磁同步电机交直轴电感近似,无磁阻转矩。因此本文选用表贴式永磁同步电机为对象,基于滑膜观测器的表贴式永磁同步电机驱动控制系统框如图1所示。

图1 驱动控制系统框图
本文采用基于模型的故障诊断方法,依据滑膜观测器所输出的信息与位置传感器所输出的信息对比分析后得到残差,实现位置传感器的故障诊断。
2 位置传感器故障诊断技术
2.1 滑膜观测器设计
滑膜变结构控制的基本概念是构建一个系统能够跟随所控制系统动态变化的过程。通过构建超曲面将状态空间划分为不同的区域,使系统能够满足滑动模态。本章节基于表贴式永磁同步电机两相静止坐标系建立滑膜观测器,具体过程如下:
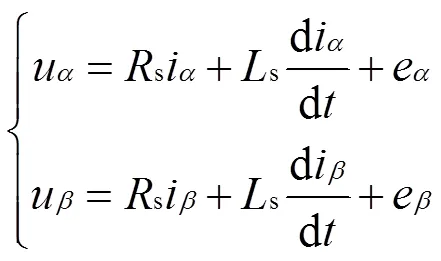
表贴式永磁同步电机两相静止坐标系下电压方程为

式中,u、u和i、i分别为两相静止坐标系下的电压与电流在轴与轴上的分量;s为定子电阻;s为表贴式永磁同步电机的电感,其中轴电感L与轴电感L的关系为LLs;f为永磁体磁链;e为定子电角速度;为电角度。
滑膜观测器所观测的反电动势为

式中,e,e分别为两相静止坐标系下反电动势在轴与轴上的分量。
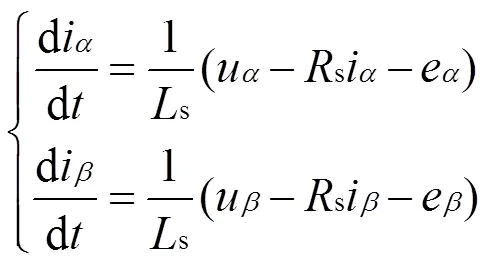
则式(1)可化简为
式(3)经过变换得到电流的导数信息在左边的形式为
为了得到反电动势信息e,e,滑膜观测器如式(5)所示。
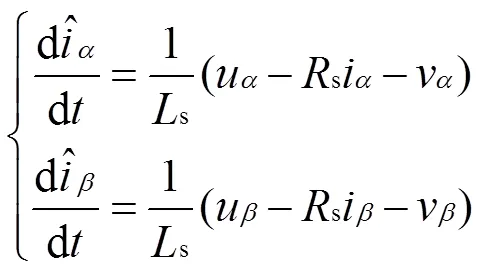
式中,i,i为滑膜观测器所估计的电流值;v,v为滑膜观测器的输入值。
则滑膜控制率设计为


定义滑膜面函数为
系统稳定性分析利用李雅普诺夫(Lyapunov)函数,假设存在一个函数满足如下条件,则系统就会在平衡点1=0全局渐进稳定。
则系统的滑模面函数如图2所示。
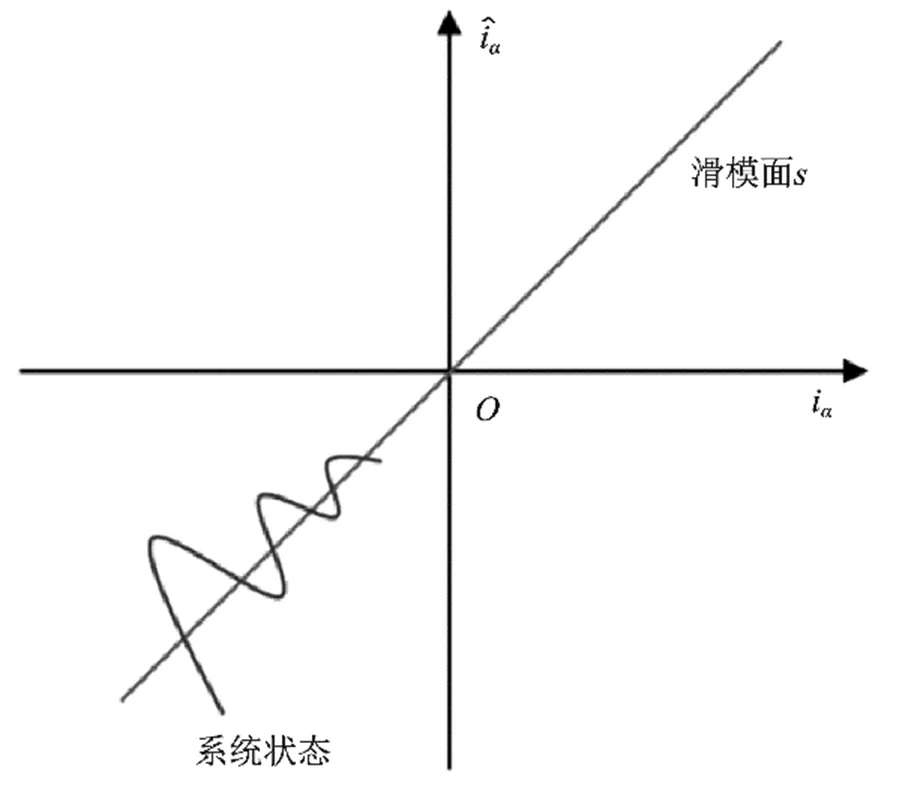
图2 滑模面函数
构造李雅普诺夫候选函数为
则该滑膜观测器需要满足的稳定性条件为

式(10)成立时,可以得到1无限收敛到零,同理可得到稳定性条件为
2.2 基于反正切函数的转子位置估计
滑膜观测器所输出高频反电动势开关信号中含有高频成分,因此需要低通滤波器来滤除高频成分。再通过反正切函数得到转子位置及速度为


式中,c为滤波器截止频率。
则转子位置角表达式为
则滑膜观测器整体结构如图3所示。
综上可得,转子电角度的获取由反电动势信息通过反正切函数与角度补偿量相加得到,转速信息同样由反电动势信息计算得到。
2.3 基于滑膜观测器的故障诊断
本节利用上述章节所建立的滑膜观测器构建基于模型的故障诊断方法。利用位置传感器与滑膜观测器所输出的转子位置与转速作差,再与转速与位置角度阈值对比,判断是否发生故障。具体原理如图4所示。
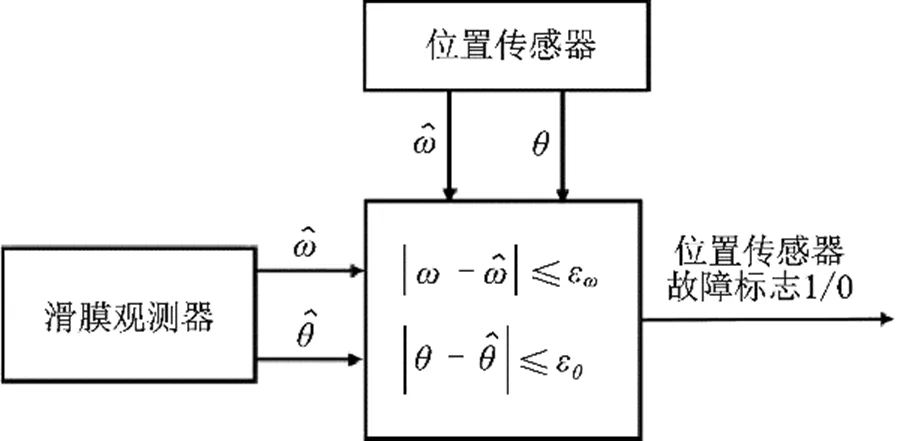
图4 故障诊断原理
当位置传感器发生失效故障时,此时位置传感器所检测转速会变为0,而滑膜观测器所得转速仍为电机转速,此时转速差会超过阈值,位置传感器故障标志位置为1。
当位置传感器发生非失效故障时,此时位置传感器所检测角度信息会产生固定的偏移,而滑膜观测器所得位置仍为电机实际位置,则位置差会超过阈值,位置传感器故障标志位置为1。
当诊断出位置传感器发生故障后,故障标志位置为1,此时不再使用位置传感器所输出信号而是由滑膜观测器代替。
3 仿真研究
利用MATLAB/Simulink搭建直接转矩控制下的表贴式永磁同步电机无位置传感器控制模型,仿真电机参数如表1所示。
表1 电机参数
参数数值 极对数4 定子电阻/Ω0.15 电感/mH0.001 7 磁链/Wb0.22 转动惯量/(kg·m2)0.017 6
设定仿真转速为300 r/min,带载启动负载为25 N·m,直流电压270 V,仿真时间为2 s,滑膜观测器所观测转子位置信息如图5所示;滑膜观测器所观测转速信息如图6所示;滑膜观测器所观测转子位置对比如图7所示。由仿真结果分析可知,滑膜观测器所观测转速与转子位置信息在该工况下能够使系统正常运行。
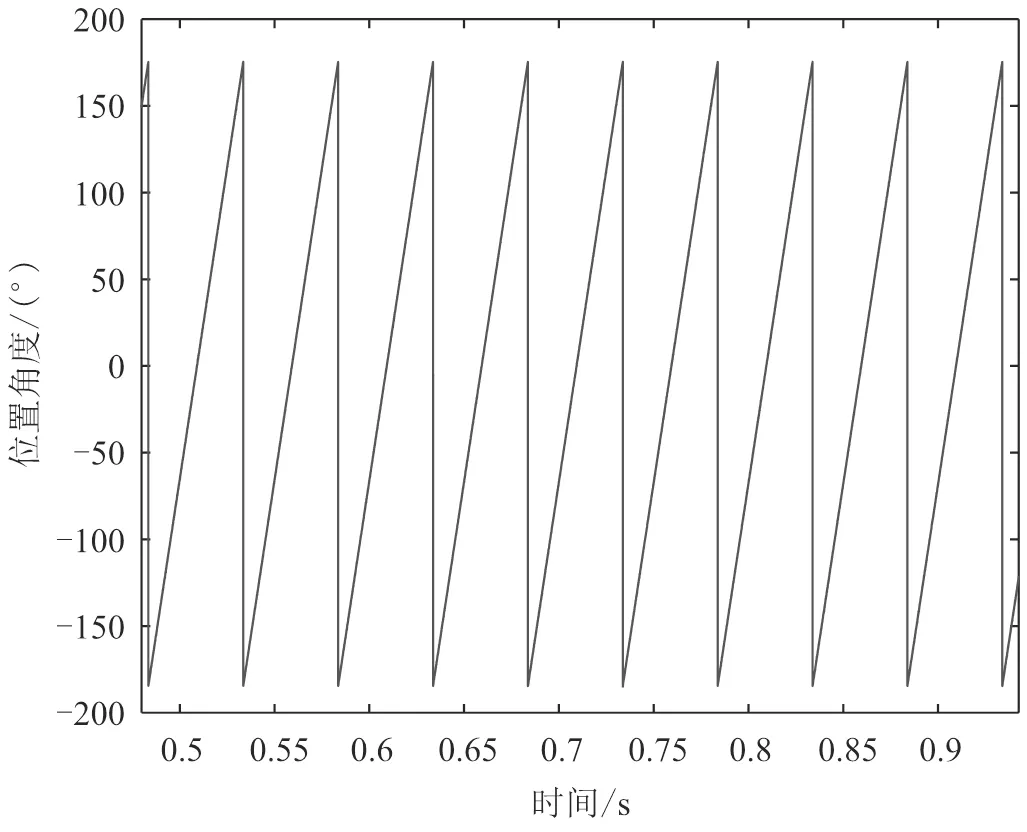
图5 观测器观测转子位置
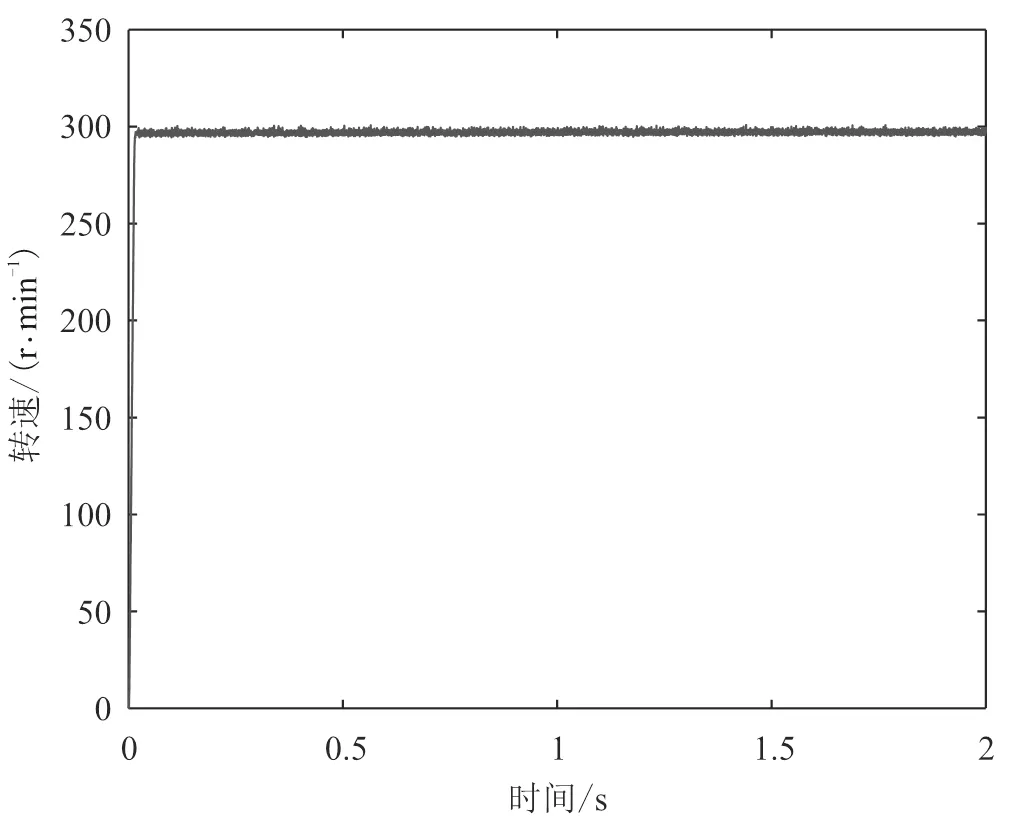
图6 观测器观测转速
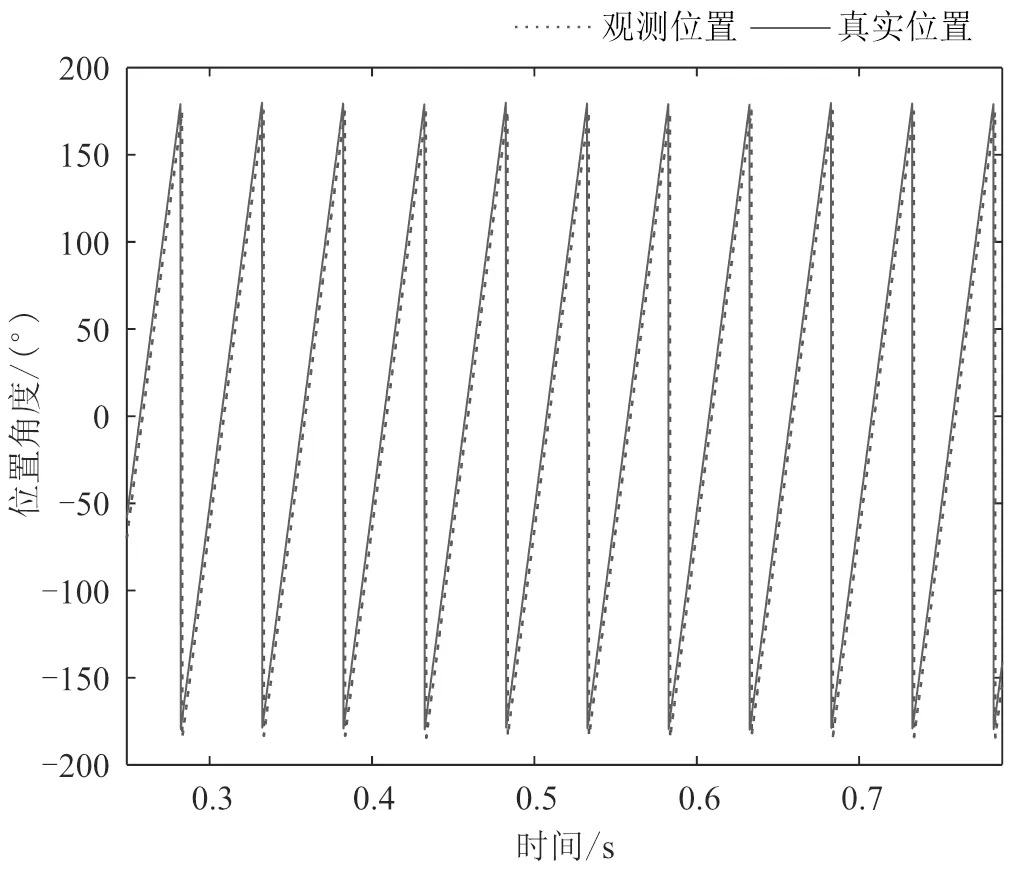
图7 位置对比图
仿真时间为2 s,假定位置传感器1 s时发生失效故障则位置传感器转速变化与故障标志位变化情况如图8与图9所示。
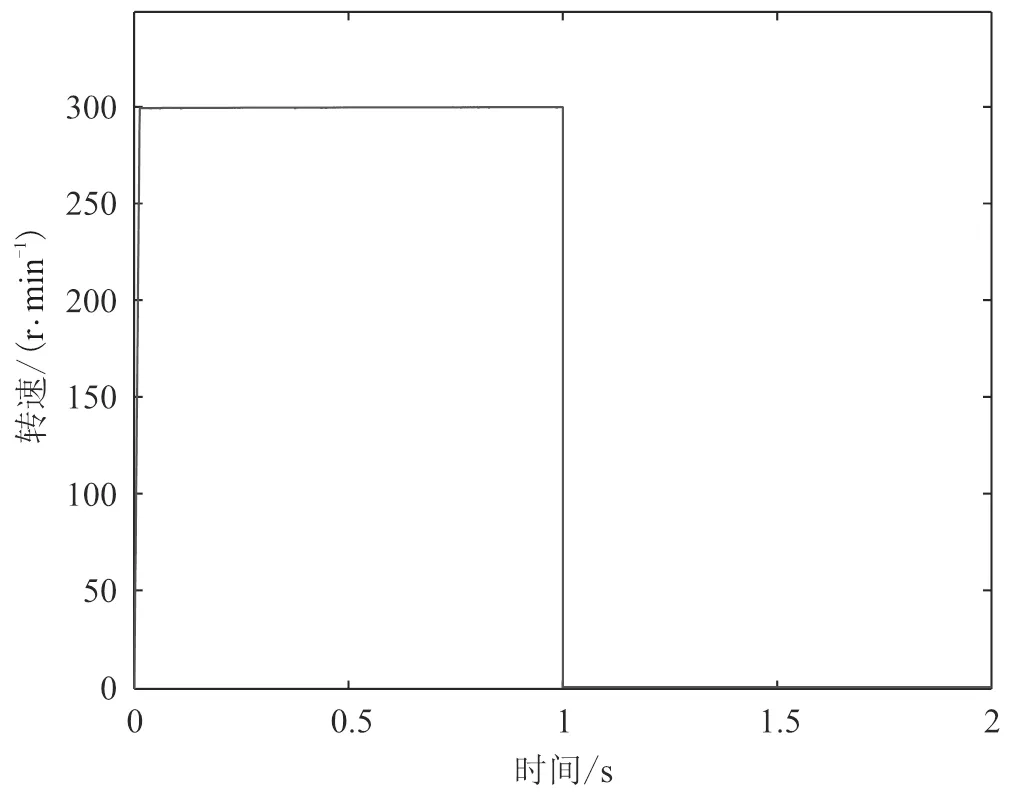
图8 故障下转速变化
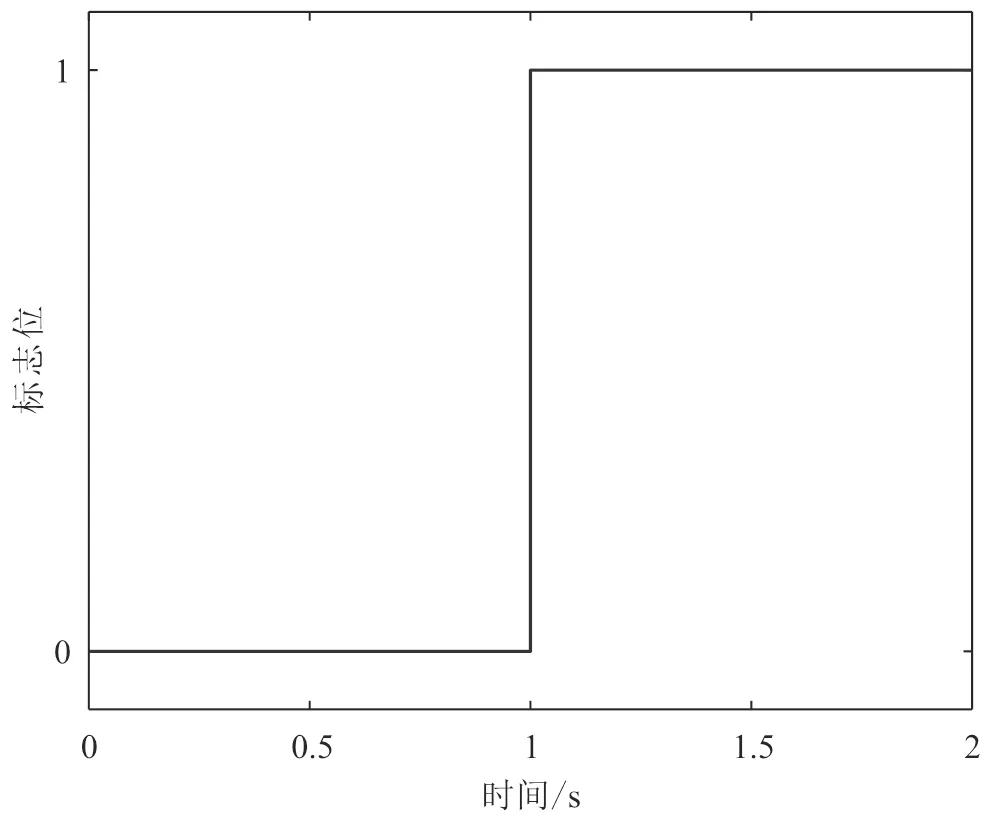
图9 故障标志位变化
由图5-图7可得,滑膜观测器所观测转子位置正常,且转速响应较快,观测位置与真实位置之间差值较小所以验证了本文所提滑膜观测器控制系统可行性。在故障发生时,本文所提故障诊断原理能够有效做出判断。
4 结论
本文针对表贴式永磁同步电机位置传感器故障下的转子位置获取技术,构建了一种滑膜观测器用作位置传感器的故障诊断。首先,利用直接转矩的控制方式实现了永磁同步电机的矢量控制,能够保证电机在正常状况下运行。其次,通过设置滑膜增益与切换函数实现滑膜观测器的稳定运行。最后,利用滑膜观测器输出的转速与转子角度信息实现位置传感器的故障诊断。滑膜观测器能够准确的计算出转子信息且故障诊断策略也能及时诊断出故障,从而提高了永磁同步电机驱动控制系统的安全性。
[1] 吴航.基于滑模观测器的表贴式永磁同步电机无位置传感器控制策略研究[D].杭州:浙江大学,2021.
[2] 吕德刚,李子豪.表贴式永磁同步电机改进滑模观测器控制[J].电机与控制学报,2021,25(10):58-66.
[3] KRAMER A,CIZMIC M,et al.I Nvestigation of the Linear Alternative of the SMO Switching Function Used for Self-sensing High-speed PMSM[C]//2019 IEEE 10th International Symposium on Sensorless Control for Electrical Drivers (SLED).Piscataway: IEEE,2019:1-6.
[4] MURSHID S,SINGH B.An Improved SMO for Posi- tion Sensorless Operation of PMSM Driven Solar Water Pumping System[C]//2020 IEEE International Confe- rence on Power Electronics,Smart Grid and Renewa- ble Energy(PESGRE).Piscataway:IEEE,2020:1-5.
[5] LEE K S,RYU J S.Instrument Fault Detection and Compensation Scheme for Direct Torque Controlled Induction Motor Drives[J].IEE Proceedings-Control Theory and Applications, 2003(4):376-382.
[6] KOMMURI K S,RATH J J,VELUVOLU C K,et al. An Induction Motor Sensor Fault Detection and Isola- tion Based on Higher Order Sliding Mode Decoupled Current Controller[C]//2014 European Control Confe- rence.Piscataway:IEEE,2014:2945-2950.
[7] 杜承东,聂子玲,李忠瑞.一种基于模型预测的永磁同步电机直接转矩控制策略[J].电机与控制应用,2021, 48(5):1-6.
[8] TAKAHASHI I,NOGUCHI T.A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor[J].IEEE Transactions on Industry Applications, 1986(5):820-827.
[9] 李超.基于滑膜观测器的无传感器PMSM驱动控制系统的研究[D].哈尔滨:东北林业大学,2013.
[10] YUAN Q,YANG Y,WU H,et al.Low Speed Sensorless Control Based on an Improved Sliding Mode Observ- ation and the Inverter Nonlinearity Compensation for SPMSM[J].IEEE Access,2020(8):61299.
Research on Fault Diagnosis of Surface Mounted Permanent Magnet Synchronous Motor Position Sensor Based on Back Electromotive Force
XU Kejie1, DONG Xiaoxu2, LI Yaoqiang2, CHEN Yong3, LI Jing2, HE Wenjing2, QI Weidong2, GONG Jie2, ZHANG Xiyue2
(1.School of Automobile, Chang'an University, Xi'an 710064, China; 2.Baoji Geely Auto Parts Company Limited, Baoji 721306, China; 3.Guizhou Transport Science Research Institute Shares Company Limited, Guiyang 550008,China )
It is very important to obtain the rotor position in the permanent magnet synchronous motor drive system, which affects the safety and stability of the system.Its position sensor often fails due to the poor working environment, mismatches between signals and other reasons, which can not provide effective rotor position information for the drive control system. Based on the control method of direct torque control, this paper constructs a sliding film observer based on the back electromotive force, which is used for the fault diagnosis of surface-mounted permanent magnet synchronous motor. The sliding mode observer is constructed by reasonable sliding film gain value and switching function, the rotor position information is extracted by arctangent function, and the simulation model is built in MATLAB/Simulink for verification.
Surface permanent magnet synchronous motor; Back electromotive force; Rotor position estimation; Fault diagnosis
TM341
A
1671-7988(2023)17-10-06
10.16638/j.cnki.1671-7988.2023.017.003
徐克杰(1997-),男,硕士研究生,研究方向为新能源汽车技术,E-mail:836823939@qq.com。