负载估计的PMSM 速度指定位置自适应反推控制*
2023-09-18孙宜明王淑红王旭平
孙宜明 王淑红 王旭平 弋 帆
(太原理工大学电气与动力工程学院,山西 太原 030024)
随着国家对机器人新兴产业的大力扶持,机器人机械臂的精确轨迹控制研究成为一大热点[1]。永磁同步电机(permanent magnet synchronous motor,PMSM)以高转矩、高效率等优点逐渐成为机器人等自动化生产的主要支柱,由于目前对伺服定位的要求严格,实现精准目标位置控制成为研究难点[2-3]。
传统三闭环伺服位置控制结构中,仅有电机参考位置一个给定量,电机速度不可调节,且电机调节参数数目较多[4],实际生活中,如果仅满足伺服位置的定位要求,会引起电机快速起停,导致机械臂抖动振荡、缩短电机和机械臂的使用寿命[5]。如果可以在实现位置定位的前提下,使速度成为可调节变量,这样既减少电机骤起骤停因机械惯性产生的损坏,又增加位置控制的灵活性[6]。因此,伺服位置控制迫切需要一种速度可变且可调参数较少的控制策略。
PMSM 伺服控制系统是一个非线性且时变的高阶复杂系统,而反推控制是一种有效的非线性控制方法,可以实现PMSM 系统完全解耦,且设计过程简单[7],近年来在电机控制领域得到广泛关注,并应用于PMSM 位置伺服控制系统[8]。文献[9]将自适应反推控制算法应用于电机位置伺服控制系统,通过仿真结果验证控制器具有响应速度快、稳态精度高的优点,但针对位置环、速度环及电流环分别设置了扰动误差项,导致控制系统调节参数多,仍存在电机速度不可控等问题。文献[10]提出速度指定位置跟踪控制,在位置控制过程中增加速度的自由度,通过仿真结果验证该控制系统对连续位置具有良好的控制效果,但该控制系统没有针对固定位置情况的伺服定位进行设计,且未考虑电机内部参数变化的影响。
本文提出了一种自适应与反推控制相结合的控制方法,在实现PMSM 伺服位置控制基础上,增加转速控制量,实现了固定位置不变和固定位置可变的伺服定位控制,增加位置控制的灵活性和可靠性。同时考虑电机内部参数在实际运行过程中并非常数,采用q轴电流集中补偿来抵消电机内部参数变化对控制系统产生的不良影响,同时增加负载转矩估计来应对未知负载。仿真和实验结果表明,本文提出的控制策略具有良好的动稳态特性和较强的抗干扰能力,解决了位置控制过程中速度不可调的缺陷,实现了伺服位置控制的灵活定位,对实际伺服控制系统具有很好的参考价值。
1 PMSM 数学模型
采用id=0 的矢量控制,基于同步旋转dq坐标系下的PMSM 数学模型为
式中:θ为转子机械角度;ω为转子机械角速度;J为转动惯量;p为极对数;B为粘滞摩擦系数;TL为负载转矩;R为定子电阻;ɸf为永磁体磁链;Ld、Lq分别为dq轴电感;id、iq分别为dq轴电流;ud、uq分别为dq轴电压。
2 控制系统的设计
反推控制以系统的最终目标为出发点,通过构建虚拟状态变量和Lyapunov 函数构成新的子系统,设计虚拟控制变量使系统稳定收敛,逐级设计直到得到系统的实际控制量,使得非线性控制系统达到最终跟踪目标值,具体设计步骤如图1 所示。

图1 反推控制设计步骤
由于电机实际运行过程中内部参数并非固定值,这会对控制系统产生较大的影响。自适应控制算法是一种外界条件发生改变后控制系统能够自我调节,从而使系统仍运行在最佳状态的控制方法[11]。自适应控制基于系统的状态方程,控制结构包括自适应律、参考模型和可调模型三部分,其结构如图2 所示,该控制在电机运行过程中提取有效信息来自我完善模型,使目标参数逼近实际值,保证系统高性能运行,将自适应控制与反推控制算法结合能够有效抑制状态方程中参数变化产生的不良影响,保证系统具有良好的鲁棒性和动稳态特性。
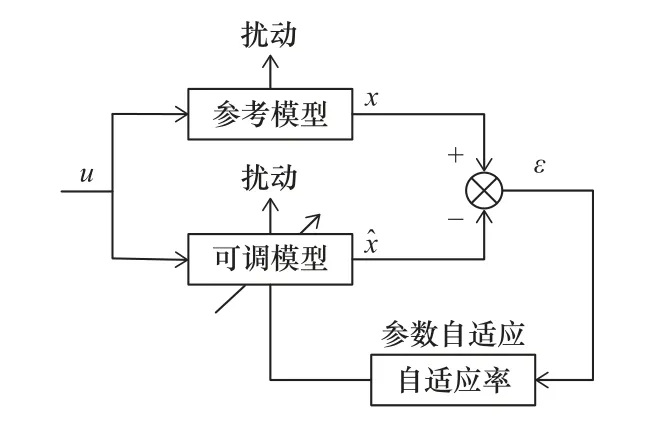
图2 模型自适应原理图
按照反推控制设计步骤,同时设计电机参数自适应律,PMSM 固定位置指定速度自适应反推控制系统具体设计过程为
根据参考文献[12]可知:若参考路径为y=yd(θ),其中yd为路径变量θ的连续参数,通过式(5)使速度达到给定值:
根据以上原理分析,假设给定参考位置信号为θ*=θd[η(t)],其中θ*为关于时间的间接函数θd[η(t)],且该函数三阶可导;给定参考位置的参考速度为v*=vs[θd(t),t],因此满足式(6)即可实现固定位置速度可控调节控制:
式中:γ(t)为速度跟踪误差。后文用vs表示vs[θd(t),t],用γ表示γ(t)。
基于负载估计的PMSM 指定位置速度跟踪自适应反推伺服位置控制器设计如下。
设计各个控制系统的子系统为
式中:ω*、iq*、id*分别为角速度和电流给定的中间虚拟控制量;eθ、eω、eq、ed分别为PMSM 位置、速度以及电流的跟踪误差。
控制系统的最终目标是实现位置精准定位,首先对位置跟踪误差eθ求导:
得到角速度的参考虚拟控制量为
将ω*代入位置跟踪误差导数得
对速度跟踪误差eω求导可得:
构造第二个子系统Lyapunov 函数为
本文采用id=0 的矢量控制系统,因此d轴电流的参考值id*=0。
分别选取dq轴电流跟踪误差作为新的虚拟状态变量,对dq轴电流跟踪误差求导,整理为
构造第三个子系统的Lyapunov 函数为
由于式(17)和式(18)包含电机的实际控制量ud和uq,系统控制器设计为
控制系统自适应律为
将式(20)~式(24)代入式(19)的导数可得
式中:kθ、kω、kq、kd为控制系统调节参数;λ1、λ2为自适应调节系数,且它们均大于零。
通过以上设计步骤,在反推控制算法实现位置跟踪的基础上,增加了速度的自由度和未知负载的转矩估计能力,同时该控制器能够有效抑制电机内部参数变化对控制系统产生的不利影响,通过q轴电流集体补偿大大减少对每个内部参数的自适应参数设计,控制系统简明易懂,简化了位置伺服控制系统的复杂性。
3 仿真结果分析
基于负载估计的PMSM 指定位置跟踪速度自适应反推控制系统框图如图3 所示。

图3 控制系统结构图
根据图3 控制结构框图搭建基于Matlab/Simulink 仿真模型,具体结构如图4 所示。
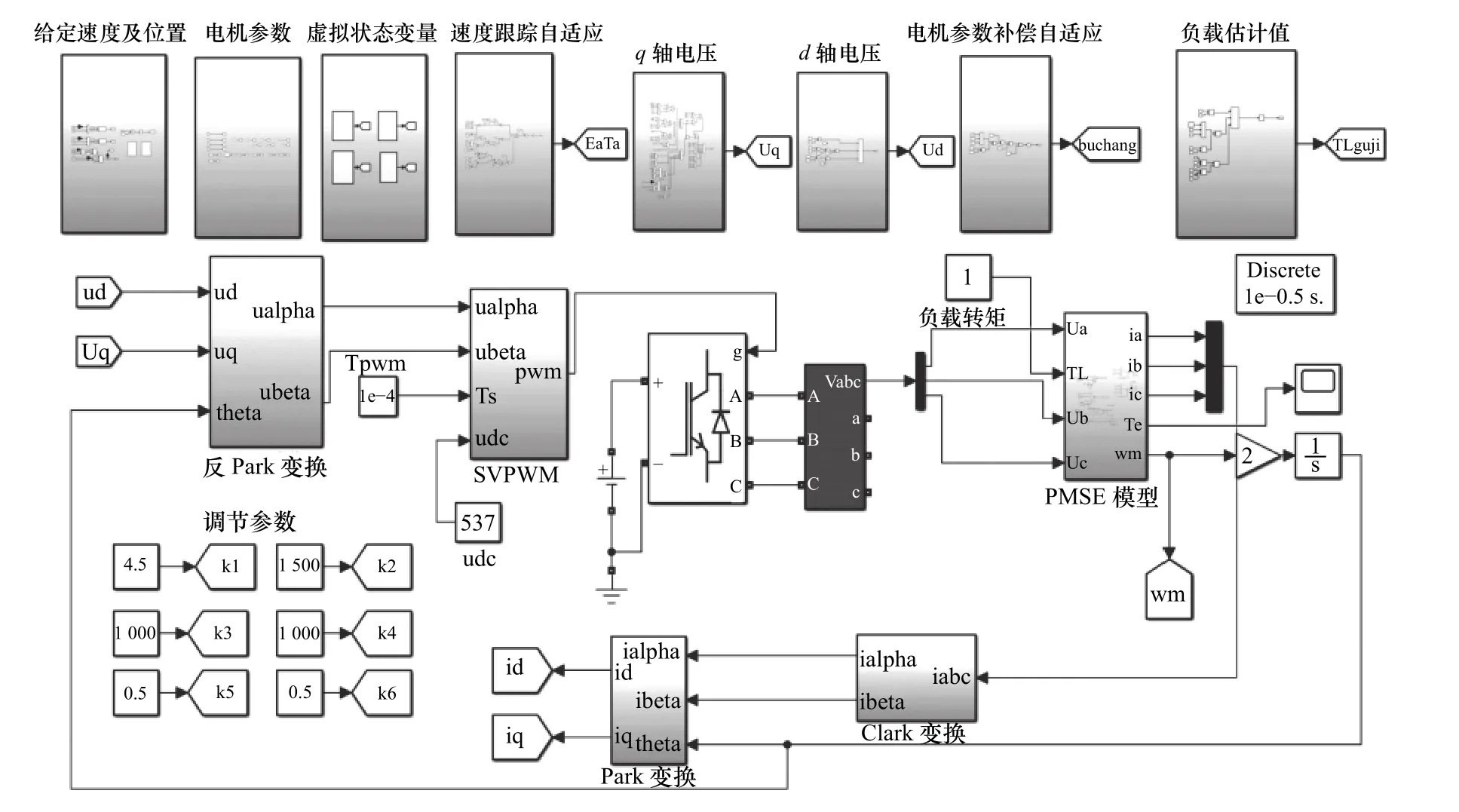
图4 Matlab/Simulink 仿真模型
仿真模型电机参数见表1。

表1 PMSM 仿真参数
传统的PID 三闭环伺服位置控制共有8 个调节参数,本文采用的方法仅需6 个调节参数,同时解决了原位置控制中速度不可调节的问题,增加了未知负载的转矩估计,采用相对较少的调节参数,增加系统调节功能,对于电机驱动具有实用的价值。
按照电机内部参数的变化规律,仿真模型电机参数设置为:定子电阻为(1~1.5)Rs,阻尼系数为(1~2)B,永磁体磁链为 (0.8~1)ψf,转动惯量为(1~2)J以及电感为(0.8~1)L的斜坡信号模拟电机内部参数运动过程的变化规律。仿真中控制器的参数设置:kθ=4.5,kω=1 500,kd=1 000,kq=1 000,λ1=0.5,λ2=0.5。
3.1 PMSM 固定位置自适应仿真结果
为了使伺服定位可以平滑过渡,设计系统0.05 s电机速度正弦达到给定参考速度,电机到达给定位置前0.05 s 让其减速,最终正弦平滑到达目标位置,完成速度指定位置的伺服位置精准定位的目标。
设置PMSM 参考位置 θ*=200°,参考速度vs=50 r/min,电机空载运行得到的仿真结果如图5 所示。

图5 PMSM 参考位置固定运行仿真图
由图5a 可知,电机在0.84 s 到达参考目标位置200°附近,稳态时位置误差在 0.03°左右,证明系统具有良好的位置定位能力。对比图5b 可知,该控制系统速度变为可调节变量,避免电机骤起骤停,转子到达指定位置前速度维持在50 r/min 左右,证明系统具有速度指定位置的定位能力。由图5c 可知,无自适应模块会引起电机速度波动较大,负载转矩估计值在0 N·m 附近波动,验证自适应环节可以很好适应电机参数变化对控制系统的影响且系统具有良好的负载转矩估计能力。仿真结果验证了控制系统在参考位置和速度固定不变工况的可行性。
3.2 PMSM 变位置变速自适应仿真结果
为验证该系统在参考位置参考速度可变,电机内部参数变化且负载转矩未知的情况下仍具有较好的位置定位和自适应能力,设置参考位置每1 s 增加 50°,参考速度由启动的20 r/min 每1 s 增加10 r/min,PMSM 变位置变速空载运行仿真结果如图6所示。

图6 PMSM 变位置变速负载自适应运行仿真图
由图6a 可知,PMSM 分别用时0.5 s、0.4 s、0.3 s 和0.2 s 到达参考位置 50°,100°,150°和 200°。由图6b 可知,启动时电机速度维持在20 r/min 左右,1 s 后电机速度在30 r/min 附近波动,2 s 和3 s 分别维持40 r/min 和50 r/min 附近,证明该系统具有速度指定位置的定位能力。由图6c 可知,无电机参数自适应模块在参考速度20 r/min 附近的波动较大,增加电机参数自适应速度仅发生微小波动,证明自适应环节可以有效抑制电机内部参数变化对控制系统产生的影响。通过分析仿真结果,证明控制系统在负载转矩随机且参考位置和参考速度可变情况下仍具有良好的灵活位置定位能力。
4 实验结果验证
本文通过搭建2.2 kW 永磁同步电机矢量控制平台对所提方案进行验证,平台以半实物仿真系统dSPACE 为控制器,实验系统框图如图7 所示,实验实物平台如图8 所示。
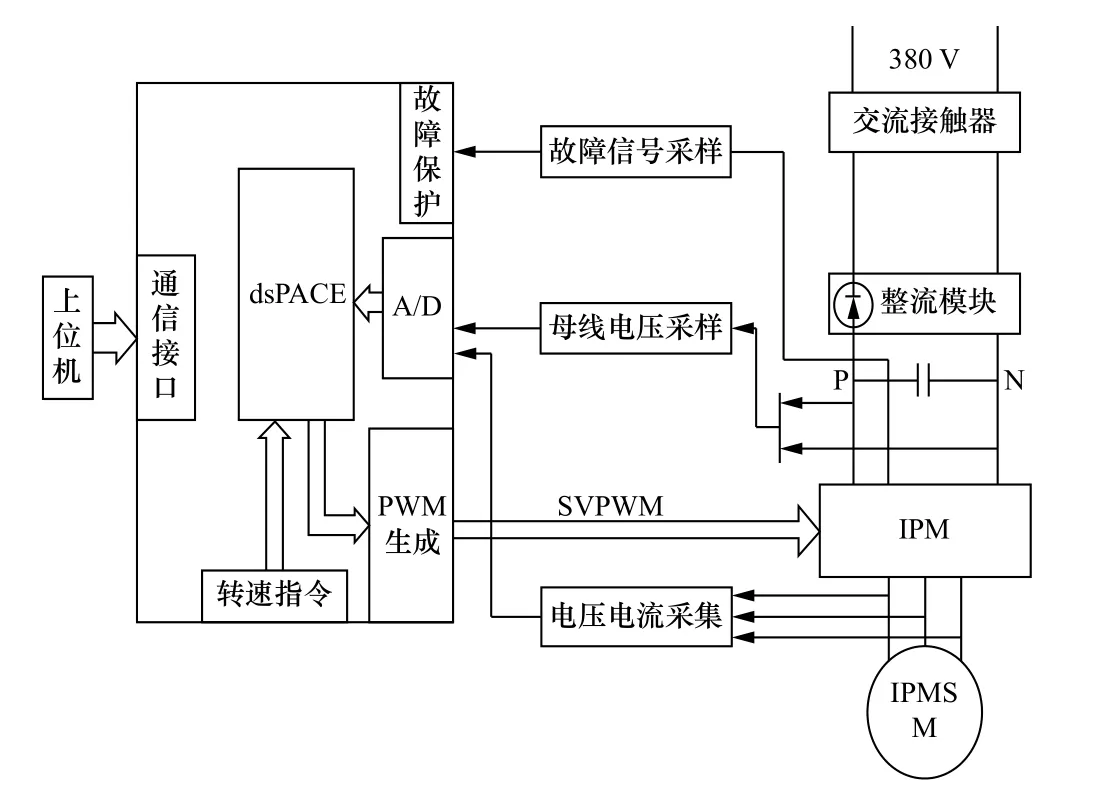
图7 实验系统框图
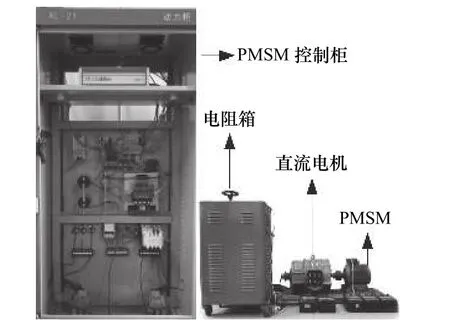
图8 实验平台实物图
实验室采用他励直流发电机电枢绕组串联电阻作为负载,因此本实验在空载情况下进行控制系统可行性验证。
基于搭建的实验平台,完成参考位置及速度固定不变,参考位置及速度可变工况下的实验。
4.1 PMSM 固定位置实验结果
实验中设置PMSM 参考位置和参考速度同仿真一样,电机空载运行下得到的实验结果如图9 所示。
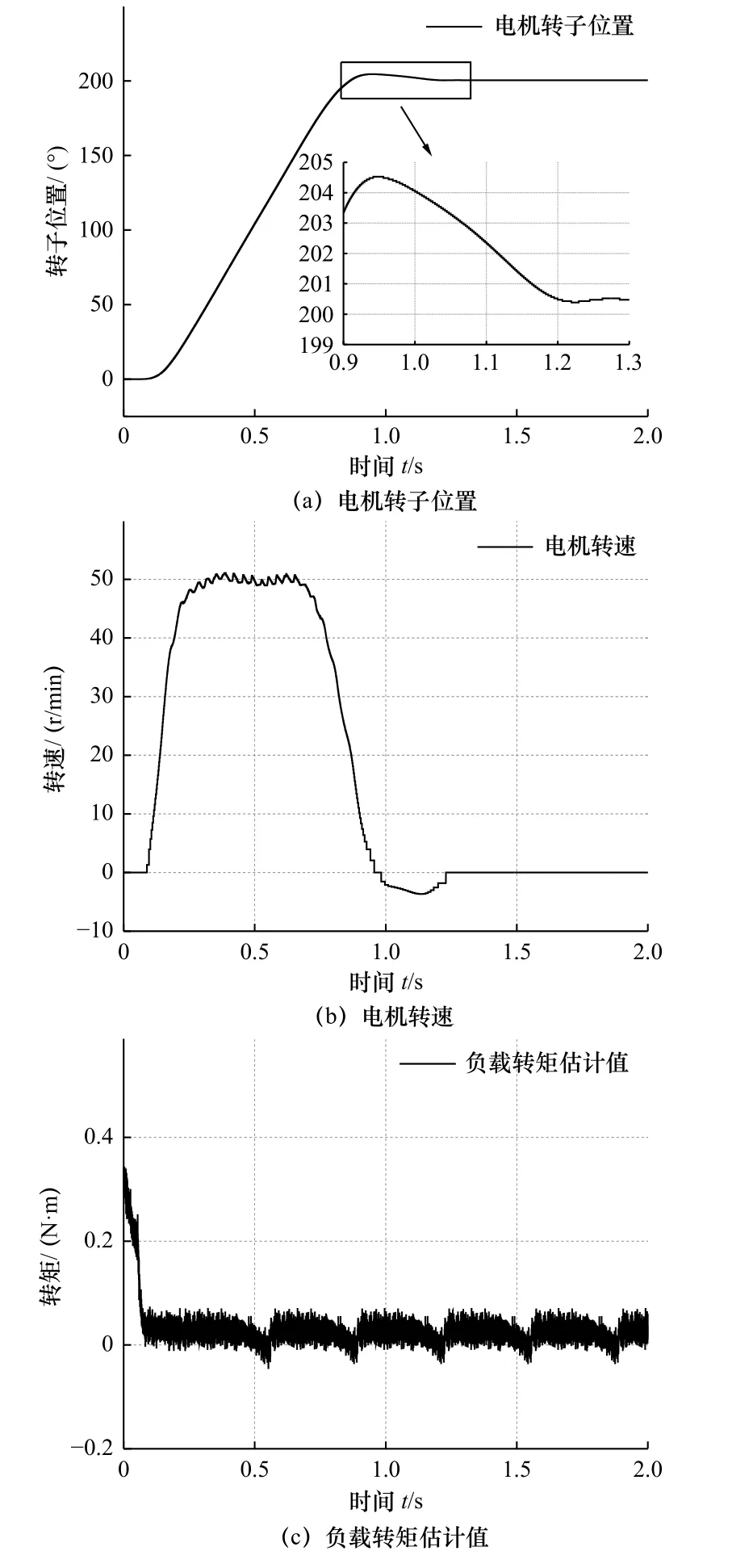
图9 PMSM 参考位置固定实验结果图
由图9 可知,转子以参考速度50 r/min 到达参考位置 200°附近。由于电机惯性较大,电机不能快速停止,出现反转并用时0.3 s 停止。由于负载估计值理论推导中与速度的偏差有关,因此电机启动时产生较大的估计值0.3 N·m,但系统在0.1 s 恢复到0 N·m 波动,通过实验结果验证了所提控制策略在参考位置参考速度不变的工况下具有良好的控制效果,同时对未知负载具有较好的转矩估计能力,对实际控制系统具有可行性。
4.2 PMSM 变位置变速度实验结果
实验设置PMSM 参考位置和参考速度同仿真一样,电机变位置变速度在空载运行下得到的实验结果如图10 所示。由图10 可知,转子可以分别可以用参考速度20 r/min、30 r/min、40 r/min 和50 r/min到达参考位置 50°、100°、150°和 200°。同样由于电机惯性较大出现反转并在0.2 s 停止,同时负载转矩估计值在位置速度改变瞬间同样由于初始速度偏差大而产生较大的估计值,约0.2 s 后在0 N·m 波动。实验结果验证了所提控制策略在参考位置参考速度可变的工况下具有良好的控制效果,对实际控制系统具有可行性。
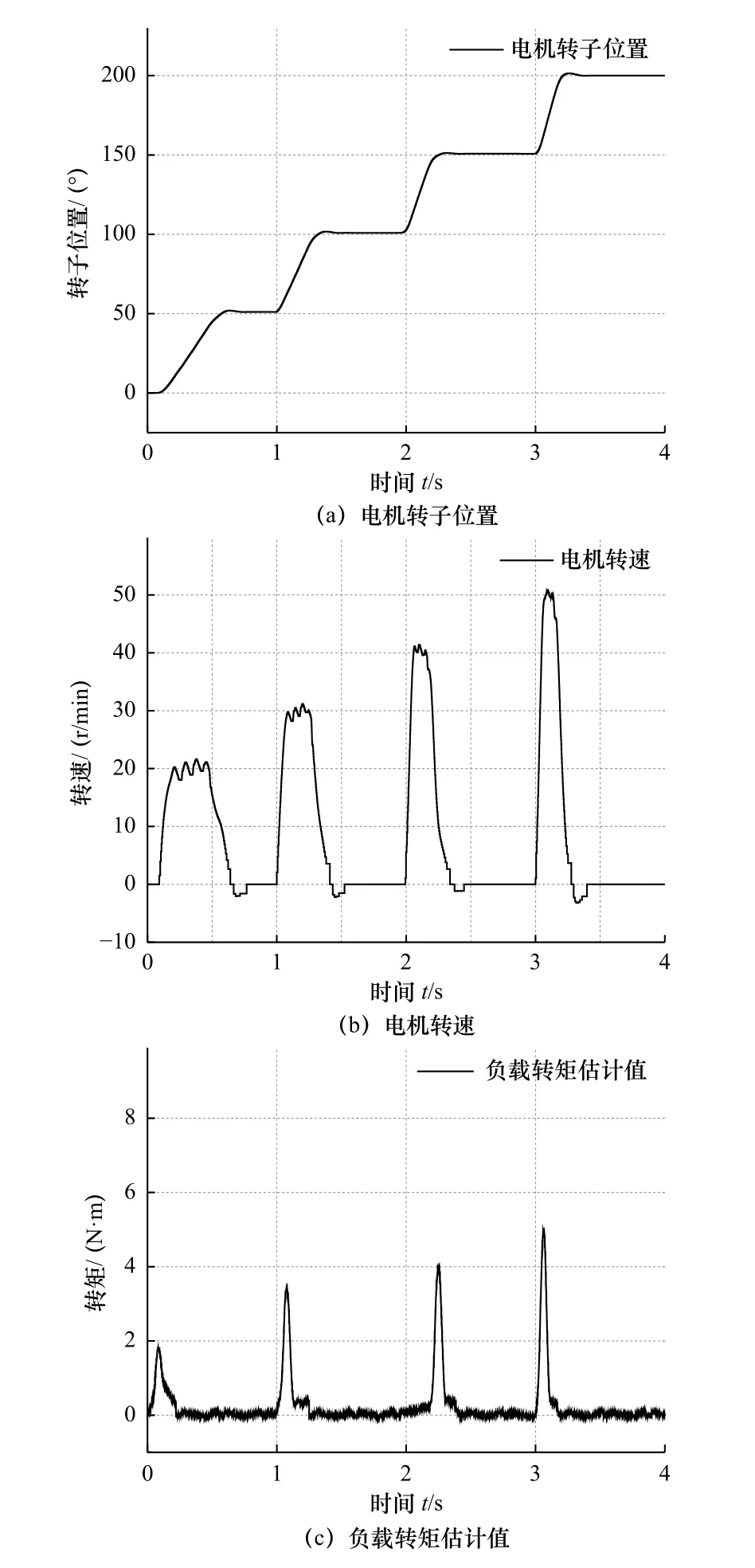
图10 PMSM 变位置变速度实验结果图
5 结语
针对永磁同步电机伺服位置控制速度不可调节等问题,本文提出反推控制加自适应算法,在实现位置控制的基础上增加速度的控制量,保证系统全局渐进稳定,与传统PID 控制相比,调整参数较少,实现了位置控制过程中速度可调的功能,减少了电机实际运行过程中内部参数变化对控制系统产生的不良影响,减小了实际控制中机械臂骤起骤停造成的机械损耗,增加了未知负载的转矩估计,对于实际工程具有重要意义。通过仿真和实验结果验证,本文提出的控制算法在固定位置参考速度不变以及固定位置参考速度可变的工作情况下都具有良好的控制效果,可以灵活控制实际生活中机械装置的启动运行,对于现代化机械生产具有很好的参考价值。
