基于膀胱尿液容量反馈的形状记忆合金驱动尿道阀研究
2023-09-18邵爱祥李亚鹏伍宗鹏陈旭鸿
邵爱祥, 李 笑,李亚鹏, 伍宗鹏, 陈旭鸿
(广东工业大学 机电工程学院,广州 510006,E-mail: lixiao@gdut.edu.cn)
尿道括约肌损伤或神经功能障碍引起的尿失禁,给患者带来严重的生理困扰和心理负担。对于重度尿失禁患者,采取药物和手术等治疗难以有效治愈[1]。因此,从工程学角度研究能替代尿道括约肌功能实现患者自主控制排尿的尿道阀具有重要的现实意义。
目前国内外已有学者开展了各种原理的尿道阀研究。文献[2-3]设计一种基于温控调节形状记忆合金(SMA)驱动的尿道阀,利用具有双重记忆效应的SMA替代尿道括约肌控制尿道启闭的功能,采用犬膀胱和尿道实验研究了尿道阀的启闭特性、尿流率特性和可靠性。文献[4]设计一种具有闭环热控制功能的经皮能量传输系统给SMA驱动器供能,实验研究了尿道阀的启闭特性和经皮能量传输系统的效率。文献[5-6]设计出一种基于弹性元件压闭和电磁力驱动的尿道阀,建立了尿道阀的数学模型和可靠性仿真模型,仿真和实验研究了尿道阀的尿流率特性和可靠性。文献[7-8]研究一种利用超声汽化蒸汽驱动的尿道阀,建立了尿道阀的驱动力和磁吸力数学模型,仿真与实验研究了尿道阀的启闭和驱动特性,基于故障树法分析了尿道阀的可靠性。文献[9]设计了一种磁耦合谐振式无线供电SMA弹簧驱动的尿道阀,建立了尿道阀的驱动力模型和无线电能传输耦合模型,仿真与实验研究了尿道阀的驱动特性和启闭特性。文献[10]提出了一种体外磁控内置式尿道阀,建立了尿道阀的流量-压差特性及磁驱动力的数学模型和仿真模型,仿真与实验研究了尿道阀的膀胱压-尿流率特性和磁驱动力特性。AMS800产品用于大量临床试用结果表明,存在植入并发症,由于长时间压闭尿道引起尿道组织血液循环不畅造成组织萎缩、侵蚀、感染等问题[11]。上述研究和临床试用均表明尿道阀工作原理可行,但依据最大膀胱压设计预紧力且长时间压闭尿道,存在引发尿道组织血液循环不畅甚至坏死等问题。
针对上述问题,本文提出一种基于膀胱尿液容量反馈的SMA驱动尿道阀,利用弹性橡胶的自回复力压闭尿道,根据膀胱尿液容量反馈自适应调节尿道的压闭程度。仿真分析和模拟实验验证了该阀原理可行,启闭特性可满足自主排尿功能要求。
1 组成原理
本文提出的尿道阀系统组成原理如图1所示,由体外和体内两部分组成。体外部分由直流电源、驱动电路和发射线圈组成。体内部分由接收线圈、整流电路、膀胱支撑膜、膀胱支架、软管、工质、阀膜、阀芯、阀体、SMA弹簧组成。膀胱支撑膜、阀膜和阀芯由医用弹性橡胶材料制成,膀胱支撑膜周边固定于膀胱支架,阀膜周边固定于阀体,阀芯两端固定于阀体。膀胱支架和阀体由医用非金属材料制成,固定于人体耻骨。软管由医用非弹性橡胶材料制成,连通膀胱支架腔与阀腔构成反馈容腔。工质为不可压缩液体,封闭于反馈容腔内。SMA弹簧为镍钛合金圆柱形螺旋弹簧,具有优良的形状记忆效应和超弹性[12]。

▲图1 尿道阀系统组成原理图
该阀工作原理是:体外电源断开时,发射线圈不产生磁场,接收线圈无能量传输,SMA弹簧处于初始自由状态,阀芯处于初始变形状态,其自回复力将尿道压闭。随着膀胱储存尿液容量增加,反馈容腔内液体压力增高,使阀膜对尿道的反馈作用力增大,保持尿道闭紧;当体外电源接通后,发射线圈产生磁场,接收线圈通过磁耦合谐振将磁能转换为电能并传递给SMA弹簧,SMA弹簧受热达到相变点温度后产生回复力,当其回复力达到阀芯的自回复力时,驱动阀芯移动,尿道开启,膀胱内尿液从尿道连续排出;排尿后,体外电源关闭,SMA弹簧随温度下降使驱动力减小,阀芯在自回复力作用下复位,尿道闭合。病人只要重复上述过程,便可自行控制排尿。
2 数学模型
2.1 阀膜反馈作用力

▲图2 膀胱尿液容量反馈调节原理示意图
图2为膀胱尿液容量反馈调节原理示意图。忽略膀胱支撑膜的弹性力,根据液体静压力基本方程,得阀膜受的液体静压力为:

(1)
式中:P1为膀胱尿液重量对膀胱支撑膜产生的压力;S1为膀胱支撑膜面积;ρ1为工质密度;ρ2为尿液密度;V为膀胱尿液容量;h为反馈容腔内工质的高度。
因阀膜近似为平面,故阀膜对尿道反馈作用力为:
(2)
式中:S2为阀膜面积。
由式(2)可知,影响阀膜反馈作用力的主要因素包括膀胱尿液容量V、支撑膜面积S1、阀膜面积S2。
2.2 阀芯自回复力
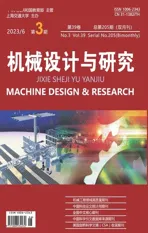
▲图3 阀芯变形状态图
阀芯由中部和两端部构成,中部起压闭尿道作用,仅两端部发生弹性变形。假设尿道位置不变,通过改变阀芯端部与阀体的固定位置,可改变初始压闭尿道的阀芯自回复力大小。阀芯变形状态如图3所示。根据几何关系,阀芯x轴向变形量为:
Δx=Htanθ
(3)
式中:Δx为阀芯x轴向变形量;θ为阀芯初始角(阀芯两端部的初始变形前后角度);H为阀芯中部与阀体的间隙。
阀芯结构对称,两端变形后产生的自回复力大小相等方向相同,故阀芯安装后初始变形即压闭尿道的最小自回复力为:
Fbmin=2Fx=2k1Δx=2k1Htanθ
(4)
式中:k1为弹性系数;θ为阀芯初始角。
由式(4)可知,影响阀芯对尿道压闭程度的主要参数有:阀芯初始角θ、阀芯与尿道接触面积S。为使阀芯与阀膜对尿道压闭效果均衡,应使阀芯与尿道接触面积与阀膜面积相等。
2.3 SMA弹簧驱动力
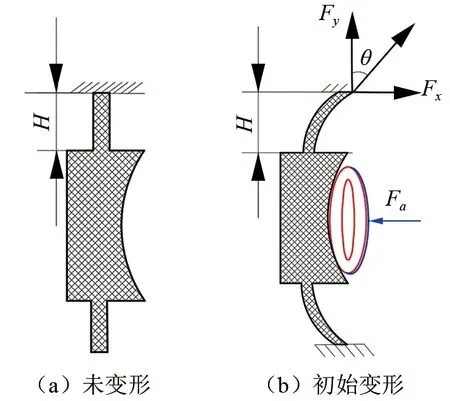
图4为SMA弹簧示意图,其主要特性参数有:弹簧丝直径d,弹簧中径D,螺旋升角α,有效圈数n,圈间隙为δ′,弹簧长度L。
▲图4 SMA弹簧示意图
由弹簧设计理论[13]可知:
(5)

当载荷F1作用于SMA弹簧使其压缩时,压缩位移δ与压缩切应变γ的关系为:
(6)
假设弹簧剪切弹性模量为G,则切应力τ与切应变γ的关系式为:
τ=G×γ
(7)
由式(5)-式(7)可得:
(8)
基于Brinson提出的一维本构模型,引入等效应力和等效应变以及剪切弹性模量和杨氏模量的关系[15]:

(9)
式中:下标0为初始状态;ξ为马氏体体积分数;γL为最大剪切残余应变;T为温度;ξS为应力诱发得马氏体体积分数。
由式(9)得:
(10)
由式(5)、式(6)和式(10)可得SMA弹簧力学模型:
(11)
当SMA弹簧初始状态无外力作用,且无残余变形时,则上式可变为:
(12)
SMA弹簧的驱动力与负载力F1相平衡,故SMA弹簧驱动力为:
(13)
3 仿真分析
为优化设计尿道阀,本文利用ANYSY Workbench,仿真分析了预紧结构参数、反馈机构参数和SMA弹簧参数对尿道压闭特性和开启特性的影响。
3.1 压闭结构对尿道压闭特性的影响
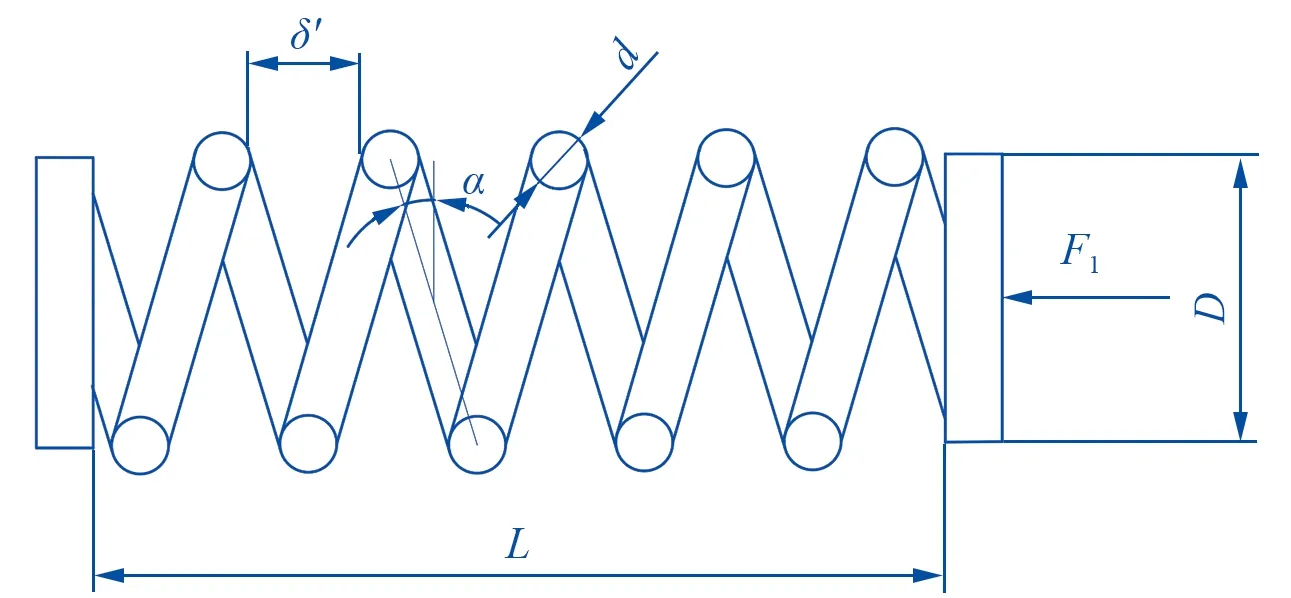
根据人体尿道结构及参数,取内径为5 mm、外径为7 mm,建立尿道三维模型并进行模型网格划分,如图5所示。尿道表面有两个对称的映射曲面,用于模拟施加阀芯自回复力和阀膜反馈作用力。尿道选择超弹性材料Mooney-Rivlin模型,尿道参数密度为960 kg/m3,材料常数C10为0.25 MPa、C01为0.11 MPa,不可压缩性常数为1.4429E-07。
▲图5 尿道的网格模型
一般人体膀胱压为(0~10)kPa[16],本设计以膀胱压为4 kPa时的Fbmin作为压闭尿道的预紧力。当膀胱储尿量少且膀胱压较低(0~4)kPa时,尿道靠两侧的Fbmin和阀膜自回复力与Fa的合力压闭。因两侧的力大小相等方向相反,故在仿真分析中取尿道映射面施加的力值为Fbmin。
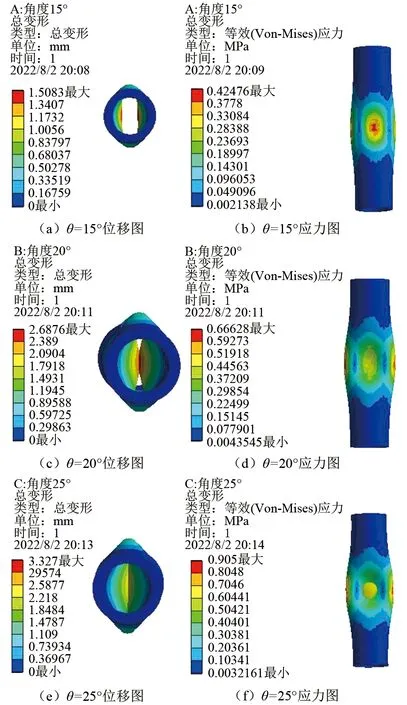
取尿道内压力为膀胱压4 kPa,k1=0.45 N/mm,H=10 mm,阀芯与尿道接触面积S=60 mm2,夹角θ为15°、20°、25°,得到不同θ时的尿道位移与应力云图(见图6)。
取夹角θ为23°,阀芯与尿道接触面积S为60 mm、70 mm、80 mm2,保持其他参数不变,得到不同S时的尿道位移与应力云图(见图7)。
可以看出,当S不变时,随θ的增大,阀芯自回复力增大,压闭尿道程度增大;当θ不变时,随S增大,阀芯自回复力减小,压闭尿道程度减小。当θ=25°,S=60 mm2时,尿道能被完全压闭。因此,压闭机构参数选取为θ=25°,S=60 mm2。
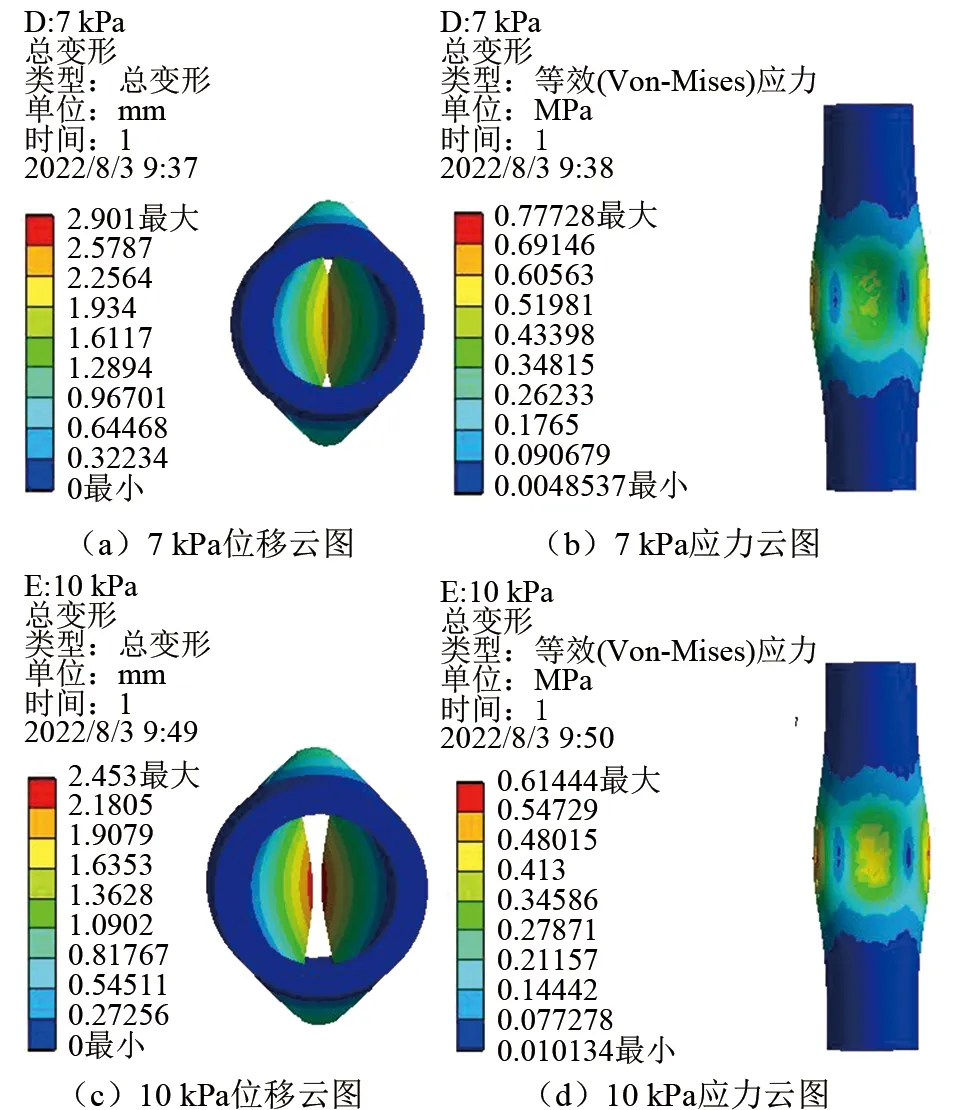
分别取尿道压力为膀胱压7 kPa、10 kPa,弹性系数k1=0.45 N/mm,H=10 mm,S=60 mm2,θ=25°,得到7 kPa和10 kPa时尿道位移与应力影响云图,如图8所示。可以看出,在无反馈机构情况下,随着膀胱压增大,仅靠阀芯自回复力对尿道的压闭程度减小。
3.2 反馈机构对尿道压闭特性的影响
当膀胱储尿量多且膀胱压较高(7~10)kPa时,尿道靠阀芯自回复力无法完全压闭,需要借助膀胱尿液容量反馈调节压闭尿道。Fa随着膀胱尿容量V增大而增大,当Fa>Fbmin时,阀芯逐渐变形,其自回复力增大,最后达到平衡,尿道被重新压闭。此时膀胱支撑膜的弹性力0,作用于尿道两侧的Fb与Fa大小相等方向相反,故在仿真分析中尿道映射面施加的力值为Fa。
▲图6 随θ变化的尿道位移与应力云图

▲图7 随S变化的尿道位移与应力云图
▲图8 膀胱压对尿道位移与应力影响云图
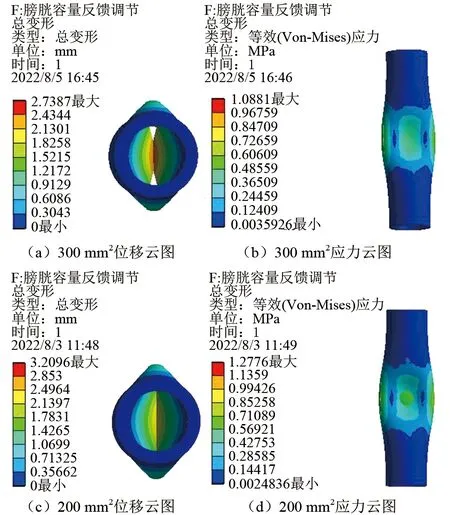
取尿道内压力为膀胱压7 kPa,h=20 cm,V=500 ml,S2=60 mm2,ρ1=ρ2=ρ水=103kg/m3,膀胱支撑膜面积S1为300 mm2、200 mm2,分别得到不同膀胱支撑膜面积对尿道位移与应力影响云图,如图9所示。
可以看出,当V不变时,随S1的增大,Fa减小,膀胱容量反馈调节压闭尿道程度减小。因此,在Fa能压闭尿道的情况下,尽量减小S1的值。
3.3 SMA弹簧结构对尿道开启特性的影响
由公式(4)可计算得,当θ=25°时,Fbmin=4.2 N。当SMA弹簧驱动力F>Fbmin,阀芯被驱动,尿道开启,正常排尿。因此,为了使尿道阀能够满足驱动要求,根据文献[17]中SMA弹簧元件的设计方法,对SMA弹簧元件进行设计计算,设计参数如表1所示。

表1 弹簧设计参数
选取负载F=5 N,行程δ=5 mm,求得弹簧参数为:d=0.85 mm,D=5.6 mm,n=7圈。
▲图9 膀胱支撑膜面积对尿道位移和应力影响云图
在ANSYS Workbench中建立阀芯模型,如图10所示,选择超弹性材料Mooney-Rivlin模型,定义材料参数为C10=0.25 MPa,C01=0.11 MPa,不可压缩性常数为1.8E-07,在仿真软件中,阀芯上下两端面给以固定约束,取驱动力F施加在阀芯左端面,模拟SMA弹簧对阀芯的拉力。

▲图10 阀芯的网格模型
当有效圈数n=7时,分别取SMA弹簧中径D为5 mm,7 mm。图11(a)、(b)为对应不同SMA弹簧中径下阀芯位移云图。可以看出,在有效圈数一定时,减小弹簧中径,可以增大SMA弹簧驱动力,从而增大阀芯位移。
当弹簧中径D=6 mm时,分别取SMA弹簧有效圈数n为7,8。图11(c)、(d)为对应不同SMA弹簧有效圈数下阀芯位移云图。可以看出,在弹簧中径一定时,减少弹簧有效圈数,可以增大SMA弹簧驱动力,从而增大阀芯位移。

▲图11 阀芯位移云图
从仿真结果可知,当D=5 mm,n=7时,阀芯最大位移量为5.181 2 mm。由于尿道内径为5 mm,阀芯最大位移量5.181 2 mm>5 mm,故尿道完全开启。
4 实验研究
为了研究尿道阀的有效性,本文搭建了尿道阀模拟实验平台,实验研究了尿道阀的膀胱尿液容量反馈调节特性和尿流率特性。
尿道阀模拟实验平台原理图如图12所示。由模拟膀胱、模拟尿道、尿道阀、液袋、支架、无线传能模块、测温仪、流量计和计算机组成。测温仪实时监控SMA弹簧温度。量杯用于采集尿道排尿量,电子秤实时记录量杯的重量变化并传至计算机。为了便于实验,阀芯、阀膜和尿道均采用弹性硅胶材料合成,阀座、模拟膀胱、支架均由树脂材料3D打印而成。实验平台实物图如图13所示。主要仪器参数见表2。
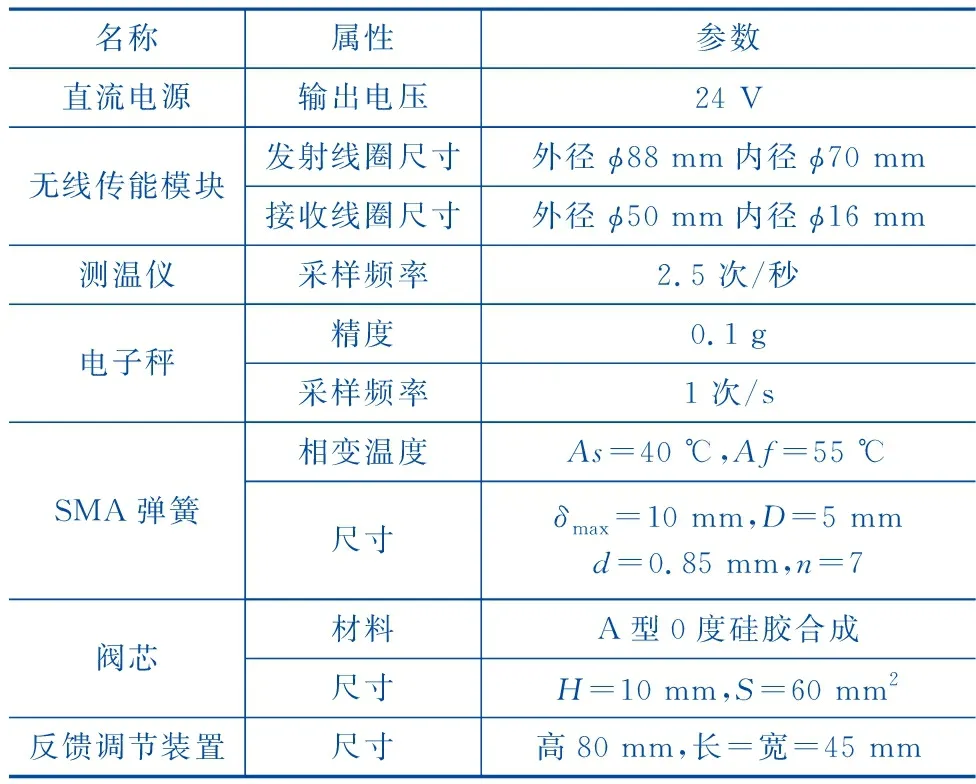
表2 主要仪器参数表
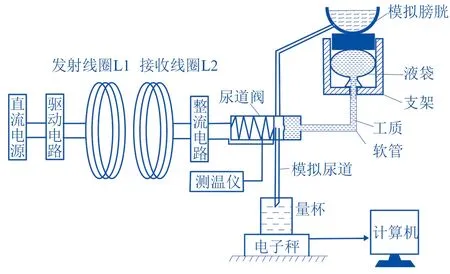
▲图12 尿道阀模拟实验平台原理图

▲图13 尿道阀模拟实验平台实物图
图14为膀胱容量反馈调节特性实验曲线。实验时,在0-t1,取膀胱压为4 kPa,无膀胱容量反馈调节装置;在t1时刻后,取膀胱压调为7 kPa,分别在T1、T2、T3周期的Y1、Y2、Y3时刻和W1、W2、W3时刻加入和撤去膀胱容量反馈调节装置。可以看出,在低膀胱压下,尿道阀能靠阀芯的最小自回复力压闭尿道,而在高膀胱压下,能利用膀胱尿液容量反馈调节装置闭紧尿道,从而可避免以最大膀胱压设计预紧力且长时间压闭尿道潜在的风险。

▲图14 膀胱容量反馈调节特性实验曲线
图15为尿流率特性实验曲线。实验时,正常人体膀胱储存尿液的容量约为(400~800)ml[18],取模拟膀胱尿液容量为500 ml。分别在有和无膀胱尿液容量反馈调节装置情况下,调整模拟膀胱与尿道阀的高度,模拟7 kPa膀胱压,并以10 ml/0.15 kPa的下降速率模拟排尿时膀胱压的变化。
图15(a)为无膀胱尿液容量反馈调节时排尿量和尿流率随时间变化曲线。当体外电路接通,SMA弹簧受热约10 s后驱动阀芯开启模拟尿道,使模拟膀胱内500 ml尿液约40 s排空,平均尿流率约为14 ml/s。在初始阶段,因无膀胱尿容量反馈调节装置,尿道无法紧闭,存在漏尿情况。图15(b)为有膀胱尿液容量反馈调节装置时的排尿量和尿流率随时间变化曲线,平均尿流率约为14 ml/s。可以看出,有和无反馈调节装置时平均尿流率基本不变,且与正常人体尿动力学参数相符,表明尿道阀有反馈调节功能后,并不影响尿道阀开启后的尿流率特性,不致影响人体正常排尿。

▲图15 尿流率特性实验曲线
5 结论
针对现有尿道阀因预紧力设计不当存在引发尿道组织坏死等问题,设计一种基于膀胱容量反馈的SMA驱动尿道阀,仿真分析了尿道阀结构参数对启闭特性的影响,实验研究了反馈调节特性和尿流率特性。结果表明:
(1) 利用弹性橡胶自回复力压闭尿道,根据膀胱尿液容量反馈调节尿道的压闭程度,尿道阀原理可行。
(2) 通过增大阀芯初始角、减小阀芯与尿道接触面积和膀胱支撑膜面积,均可改善尿道阀的启闭特性。
(3) 尿流率达14 mL/s,与人体尿动力学规律相符,尿流率特性满足人体排尿要求。
(4) 建立的尿道阀数学模型和有限元模型有效可靠,仿真结果接近实验结果,可为适用于临床的尿道阀的设计提供指导,也可为其它人工括约肌的设计提供借鉴和参考。
(5) 以中低值膀胱压设计尿道预紧力,可减小尿道承受持久的最大压紧力。进一步研究将集中于适于临床的尿道阀结构优化设计,以提高其生物力学相容性及可靠性。