基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测
2023-09-18柴子凡赵丽琴蒋海波段能全马清艳
柴子凡, 赵丽琴, 蒋海波, 段能全, 马清艳, 王 栋
(中北大学 机械工程学院,太原 030051,E-mail:czf84166@163.com)
玻璃瓶多使用压吹法[1]成型,在脱模过程中由于操作不当导致模具接缝处的瓶身出现多条分模线或是分模线不连续,这种缺陷称为分模线缺陷。对于玻璃制品上的边界缺陷,其主要技术方法是利用滤波器对图像进行预处理,再利用霍夫变换将曲线变换至参数空间,通过利用曲线上点与曲线参数之间的对偶性来检测曲线。在此基础上,段汝娇等人[2]通过对分好类的像素点进行感知编组,再使用随机Hough变换来确定直线位置;孙铁波等人[3]研究将边缘梯度方向引入Hough变换,通过缩小参数的取值空间进而确定边界位置;李后隆等人[4]通过对Canny算子中的双阈值选取进行改进,并对Hough变换进行极角约束进而确定边界位置。然而,针对透明玻璃制品的缺陷边界定位和缺陷检测的研究较少。因为玻璃制品的透明性,其上的缺陷位置很难确定并且进行稳定地检测,李伟等人[5]针对该问题提出利用Hough变换圆检测和para空间均值圆心的方法来对需要的目标进行定位;杨应彬等人[6]提出了一种基于分数体系的算法,并与轮廓特征检测和Hough变换相结合,来对需要的目标进行定位。
然而这些算法都是基于固定视图和图像质量清晰的基础上。在本文的研究背景下,使用传统的机器视觉采图方法难以有效清晰地拍到缺陷图像,所以需要先针对采集过程作优化处理,并在采集之后对图像进行特征提取等处理。针对透明玻璃瓶上的分模线缺陷,本文构建了一种基于机器视觉的玻璃瓶分模线缺陷检测方法,提出了一种将傅里叶变换、霍夫变换结合K-means聚类的无监督学习方法,实现了玻璃瓶分模线的缺陷检测。
1 检测系统的组成和原理
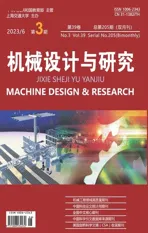
玻璃瓶缺陷检测系统采用机器视觉检测技术实现了玻璃瓶分模线的非接触式自动化检测,利用工业相机对分模线图像进行采集,并使用基于Hough变换和K-means聚类的改进的缺陷识别方法对玻璃瓶分模线的图像进行检测,其总体布局如图1所示,主要由工业相机、工业镜头、条纹面光源和传送带等组成,是以生产线上的运输带结构作为基础平台,不需要破坏生产线的基础功能,在运输带两侧加安光源支架和相机支架,在支架上安装相机和光源,当检测时,相机对运输带上的玻璃瓶进行间隔采样,可兼容多种不同型号的玻璃瓶分模线检测。对玻璃瓶分模线进行检测时,条纹面光源的条纹光经分模线发生折射,由另一侧的工业相机进行采集,经图像预处理后去除干扰和噪声,使用基于Hough变换和K-means聚类的改进的缺陷识别方法获取分模线的长度、宽度和条数等信息,进而对分模线的质量进行判断,本文使用4个相机从4个不同角度进行图像采集,提高了检测系统的检测精度和检测效率。
▲图1 检测系统总体结构示意图
2 基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测方法
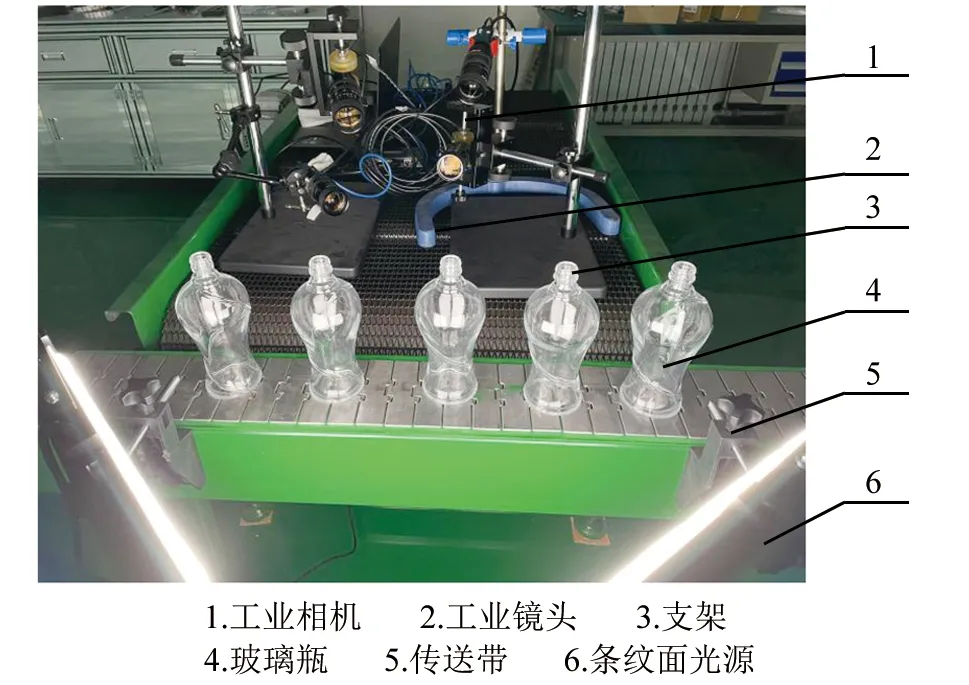
▲图2 算法流程设计图
本文使用傅里叶变换、霍夫变换结合K-means聚类的无监督学习方法,用于玻璃瓶分模线的缺陷检测,算法流程如图2所示。该算法分为图像采集、前处理和缺陷检测三个部分。在图像采集阶段,对于玻璃瓶分模线透明不易识别的问题,本文根据光的折射原理提出了引入人为的标识来对图像进行增强的方法。在图像前处理阶段,分为干扰去除和特征提取两个阶段,为提高缺陷检测的检测精度,本文提出了一种基于傅里叶变换和自动阈值分割的方法。在进行缺陷定位与检测的过程中,本文结合轮廓提取和Hough变换的方案,利用K-means聚类的方法,提出了一种基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测方案。
2.1 图像采集
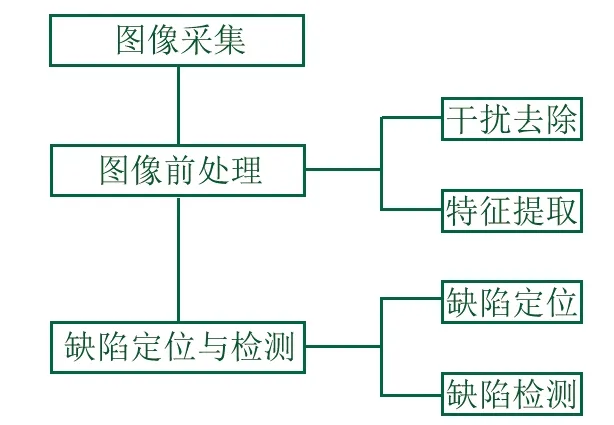
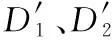
为使采集到的图片轮廓清晰,对比度明显,选择高均匀性的面光源来进行背光照明,并在其外架设暗室来阻挡环境光的干扰。由于分模线透明的特殊性,将面光源改造为条纹光,利用分模线处玻璃的折射率与其他地方不同而观察条纹的变化来检测分模线的质量,如图3所示。在经过对玻璃瓶分模线的成型原理的分析和多次试验后,设置四个工业相机从四个不同的角度对分模线的图像进行采集,在压缩成本的同时最大程度地提升检测系统的检测精度和检测效率[7-8]。
▲图3 折射对比图
2.2 图像预处理
相比于其他固定角度和固定目标的检测环境,由于人为引入的干扰和多个相机的位置变化性,相机采集到的图像是具有复杂背景的酒瓶图像。对图像进行简单的灰度化、图像作差、图像滤波与阈值分割后[9],对于从斜条纹背景的瓶身中分离出分模线的问题,提出了基于傅里叶变换和时频域转换的分模线提取方案。
基于傅里叶变换和时频域转换的主要思想是对前处理后的图像进行傅里叶变换,将图像从时域转换到频率域;然后在频率域构建合适的滤波器对频域图像进行滤波,消除图像中的斜条纹同时保留分模线的特征;将图像由频域转回到时域,对保留下的分模线特征进行缺陷检测。
由于傅里叶变换的周期性质,频率域的图像与空间域的图像并不存在一一对应的关系,实验证明,空间域中边缘方向与频率域中高频亮点的位置存在内在联系[10-11]。将频率域原点变换移动到频率域图像的中间位置,则频率域构建的滤波器具有如下传递函数:
(1)
▲图4 滤波器图形
其锐化前后的图像对比如图5所示,条纹干扰得到有效地抑制,分模线特征得到了有效地增强。
2.3 缺陷定位与检测
对采集到的玻璃瓶图像进行前处理后,可获得分模线的间断边界。为了从含有噪点等干扰的滤波后图像中提取分模线,采用Hough变换的间断边界检测方案。Hough变换是通过利用曲线上点与曲线参数之间的对偶性来检测曲线的方法,但其对于为曲线的间断边界并没有较好的效果,且其计算的时间复杂度和空间复杂度会随着参数空间维度的提升而提升,增加了计算的时间成本。

▲图5 滤波前后对比图
针对该问题,提出了基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测方案:首利用Hough变换将提取到的间断边界转换到参数空间,利用大致处于同一直线的间断点边界,其在参数空间中会发生一定的聚集效应的特性,使用聚类方法对间断点边界进行拼接,最终识别出目标分模线并对其进行缺陷检测。
2.3.1 Hough变换
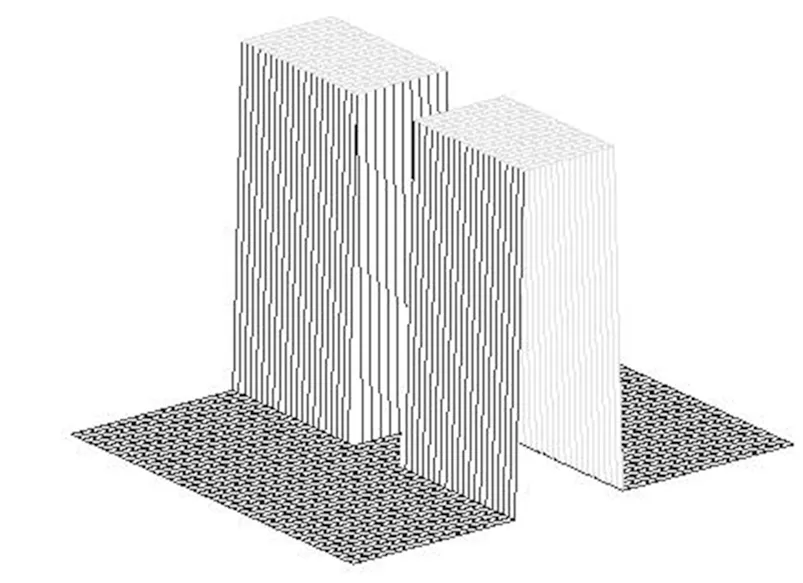
上述处理后的图像包含丰富的边缘信息,分别是分模线竖直方向的间断边界和其他零散的条纹干扰。为准确的提取分模线间断点边界,采用直线检测方案,来对图像中的目标信息进行提取。霍夫变换是通过利用曲线上点与曲线参数之间的对偶性来检测曲线的方法,是一个非常重要的检测间断点边界形状的方法。如图6所示,对于图像坐标空间的一条已知直线L来说,在参数空间中即可映射为相应的点L0;对于图像坐标空间中直线L上的任意两点A1、B1,在参数空间中即可映射为相交的两条直线,且其交点为L0[12-13]。对于图像中的一些间断点边界,利用霍夫变换将其所在直线转换到对应的参数空间后,大致处于同一直线的间断点边界,其在参数空间中会发生一定的聚集效应,从而来判断处在同一曲线上的间断点。
▲图6 Hough变换
2.3.2 边界合并及识别
K-means聚类方法是一种通过将划分出来的簇取均值点作为聚类中心,在不确定划分规则的情况下,通过对数据的不断迭代完成数据分类的无监督分类算法。采用K-means聚类方法对参数空间的数据进行聚类,大致处于同一直线的间断点边界在参数空间会发生一定的聚集效应,从而完成处在同一曲线上的间断点边界的拼接[14-15]。K-means聚类依赖于初始聚类中心的选取,若选取不当,很容易发生局部收敛的情况。而在本文的情况中,聚类中心的个数难以确定,通过构造距离代价函数,并以距离代价最小准则求解最佳聚类数k。聚类方法的实现步骤如下:
(1) 通过Hough变换将间断点边界转换到参数空间后,转换成参数空间中的有聚集效应的离散点,其包含了原空间中间断点边界的斜率和截距的信息。
(2) 构建聚类距离代价函数,设k为最佳聚类数,有n个聚类对象,m为总样本均值,mi为当前簇Ci的样本均值,p为任意对象,则有距离代价函数F(S,k):
(2)
当距离代价函数F(S,k)最小时,k即为最佳聚类数。
(3) 计算数据集中的数据到各个聚类中心的距离,将其归类到最近的聚类中心,并计算新簇的质心。
(4) 在所有数据划分完毕后,根据划分情况重新计算各个簇的质心,对数据进行重新划分并进行迭代计算,直到质心不变或达到最大迭代次数,其各簇即为连续的间断点边界,如图7所示。
(5) 计算每类簇的数据体量作为该类的可信度指标。由于分模线的间断点边界较多,其所在簇的数据体量要远远多于其他簇,由此使用最小二乘法拟合分模线的间断点边界。对分模线边界进行数量、长度和宽度等的特征提取对分模线的质量进行综合评估。
3 实验验证
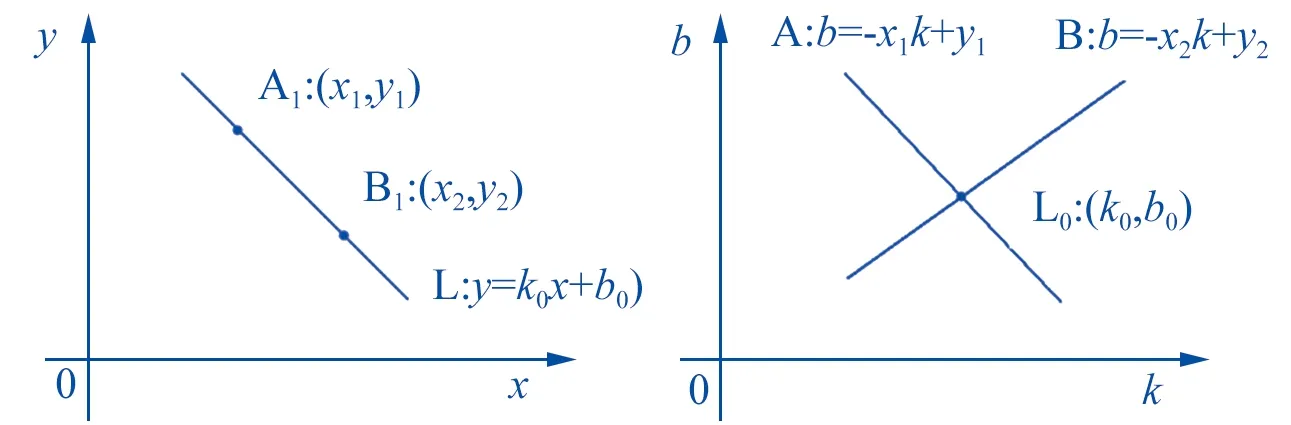
采用本文所述方法,与传统的缺陷检测方法作以下对比:①本文采用方法与传统缺陷检测方法所用时间作对比;②本文采用方法拟合分模线的位置参数与传统缺陷检测方法拟合分模线位置参数进行对比。边缘提取和分模线拟合效果如图7所示,传统边缘提取算法面对复杂干扰下提取分模线结构的能力较差。
▲图7 检测对比图
两种算法的效果对比如表1所示,表中统计了两种算法的运算时间,分模线拟合的正确度和分模线缺陷检测的准确度。

表1 测量数据对比
由表可知:
(1) 传统缺陷检测方法耗时1 052.835 ms,本文算法耗时555.231 ms。本文算法在检测效率方面有极大优势,可以适应工业现场高速检测的需求;
(2) 传统缺陷检测方法对分模线拟合的正确度只有60%,缺陷检测准确度只有50%;本文方法对分模线拟合的正确度达98.6%,缺陷检测准确度达98.5%。这是由于分模线结构的特殊性,导致在传统缺陷检测方法的采集方法下分模线可见度不高,从而影响检测精度;本文方法通过引入条纹光来加强分模线特征,并通过在频率域空间构建滤波器对图像进行锐化,最后通过聚类方法对分模线缺陷进行分类与检测,满足工业现场的高精度检测要求。
综上所述,本文所述方法具有检测速度快,检测精度高且重复稳定性好,有效地实现了工业现场的玻璃瓶分模线缺陷检测。
4 结论
本文针对工业现场分模线质量检测的难点,提出了基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测方案,通过对打光方案的优化和聚类算法的改进,最终对分模线进行特征提取并对其进行质量检测。本文总结如下:
(1) 针对分模线结构的特殊性,提出使用条纹光源加强分模线特征的方法。该方法基于条纹光通过分模线发生折射的原理,实现了分模线可见度的增强;
(2) 基于利用条纹光进行分模线可见度的增强方法,提出了构建频率域滤波器来锐化图像边缘特征。算法通过空间域中边缘方向与频率域中高频亮点的位置的内在联系,在频率域构建高通滤波器,来锐化图像指定方向上的边缘特征,实现了分模线边缘特征的锐化;
(3) 基于锐化后的分模线边缘特征,提出了基于Hough变换和K-means聚类的玻璃瓶分模线缺陷检测方法。算法将锐化后的分模线边缘特征转至参数空间,通过构造距离代价函数,使用自适应的K-means聚类方法对分模线进行定位和检测,实现了工业现场的玻璃瓶分模线检测。