月船3 号:带着印度的梦想着陆月球
2023-09-16张晨
文/张晨

▲ “月船3 号”搭乘LVM3 运载火箭发射升空
北京时间2023 年7 月24 日20:47,印度的月船3 号月球探测器搭乘LVM3 火箭发射升空,开始了奔向月球的旅程。经过一个多月的航行,8 月23 日,“月船3 号”的“维克拉姆”着陆器成功着陆月球南极地区,开启了人类月球极地探测新篇章,也标志着印度在苏、美、中后成为第四个成功实现月球软着陆的国家。
奔月之旅
由于印度LVM3 火箭(原名GSLV Mk.3)运载能力有限,无法将3.9吨的组合体送入直接奔月的转移轨道,同时对直接飞往月球的入轨精度和窗口无法保证,因此“月船3 号”仍然使用类似“月船2 号”的奔月飞行方案,即由运载火箭将探测器组合体送入大椭圆绕地轨道,探测器在此轨道上通过5 次机动抬升进入奔月轨道。
“月船3 号”的初始轨道是一条11 小时轨道,计划轨道为近地点170千米、远地点36500 千米。这已经达到了LVM3 运载火箭的运力极限。虽然在发射后北美防空联合司令部的测轨数据中给出了“月船3 号”仅进入了近地点138 千米的绕地轨道,并且被广泛报道,但有极大概率该数据是因为美国太空军的空间态势感知雷达卫星——“太空篱笆”测量精度问题,或者是探测器在两次经过“太空篱笆”时轨道发生变动导致的测量偏差。考虑到印度的发射直播中,LVM3 火箭表现完美,性能符合预期曲线,并且在关机前探测器已经达到169.7 千米高度,可以认为“月船3 号”准确进入了预定轨道,并不存在所谓的“入轨偏差过大,导致需要额外消耗燃料提升轨道”的意外。
经过1 次奔月机动和1 次抬升机动后,“月船3 号”进入12 小时轨道,随后通过第二和第三次奔月机动进入16 小时轨道和24 小时轨道。抬升机动将“月船3 号”近地点从173 千米提升至226 千米,以避免航天器在过低的近地点遇到大气阻力。
不同于“嫦娥一号”在奔月中采用的600 千米近地点,“月船3 号”和它的前辈“月船2 号”因为燃料有限,需要尽可能降低机动高度以提升点火效率,因此这几次提升远地点的点火高度不超过300 千米,通过调整轨道周期和近地点的位置,使“月船3 号”的升轨点火弧段位于印度本土上空,以满足航天器本土测控的需求。
同时,这种低近地点的大椭圆轨道升轨还存在着额外的风险。由于最后几圈轨道的远地点达到数万至十几万千米,航天器在大椭圆轨道的远地点附近会受到来自月球和太阳的引力摄动,存在直接再入的风险,因此印度租借了美国和欧洲的深空测控网以对航天器每一圈轨迹进行测定,避免其因为引力摄动而使昂贵的、寄托着印度希望的探测器在印度洋上化作一道流星。第四次奔月机动后探测器进入48 小时轨道,而最后一次奔月机动使得“月船3 号”绕地轨道的远地点达到40万千米,探测器正式踏上奔月之旅。
2023 年8 月23 日20 点13 分51 秒,月船3 号着陆器开始动力下降。按照预定的4 阶段进行,动力下降阶段一切正常,月船3 号着陆器最终在20:33 成功着陆至月球南纬69.36968°、东经32.33307°的预定着陆点附近,随后巡视器正常部署,代表着印度成功实现了月球软着陆,成为了全世界第四个将探测器送上月面的国家。
科学目标
“月船3 号”的计划着陆点位于月球南极南纬69.367°、东经32.3°附近的高地上。该地区也曾是“月船2 号”的计划着陆点。值得注意的是,目前对于“月球南极”的称呼仍然采用地球上的标准,即南纬66°34’以南区域,但实际上能够拥有极昼的月球南极纬度高达86°以上,严格来说“月船3 号不能算抵达了极圈。但目前并未对此定义加以界定。
“月船3 号”着陆器配置3 台科学仪器:钱德拉月球表面热物理实验(ChaSTE),月球地震活动探测器(ILSA),朗缪尔探测器(LP)。其中ChaSTE 用于测量月球表面的热导率和温度,获得该地区月壤的基本物理性质;ILSA 将测量月球的地震活动;LP 将探测月球表面附近等离子体密度的变化。这3 台仪器也安装在了“月船2 号”上。由于“月船3 号”着陆器上没有携带用于渡过月夜的放射性同位素加热装置,“月船3 号”着陆器的设计寿命不大于14 个地球日。
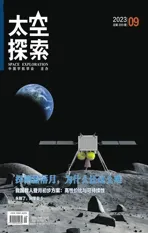
▲ 智慧号小型月球巡视器
“月船3 号”着陆器及巡视器
“月船3 号”着陆器上携带的小型巡视器“智慧号”(Pyagram)也继承了其搭载在“月船2 号”上的前辈的命名。该小型巡视器发射质量为26 千克,采用6 轮设计,行进速度最大为1 厘米/秒。由于着陆器不具备直接对地通信能力,只能在距离着陆器500 米范围内运行,于是印度空间研究组织计划让“智慧号”在其短短14 个地球日的寿命中运行500 米,通过一对拥有100 万像素的单色摄像头实现巡视器周围地形的3D 成像。巡视器计划开展一系列科学探测。该巡视器配置有一台小型钻机和2 台科学仪器:阿尔法粒子X 射线光谱仪(APXS)和激光诱导击穿光谱仪(LIBS)。APXS将测量月球表面的化学成分并推断矿物成分,LIBS 将测定月球着陆点周围月球土壤和岩石的元素成分,这个配置也和“月船2 号”上的巡视器相同。印度空间研究组织希望新的巡视器探测的数据可以获得月球表面的组成、证明月球土壤中存在水冰、描绘月球撞击的历史和月球大气层的演变。

▲ 月船3 号的小型月球巡视器
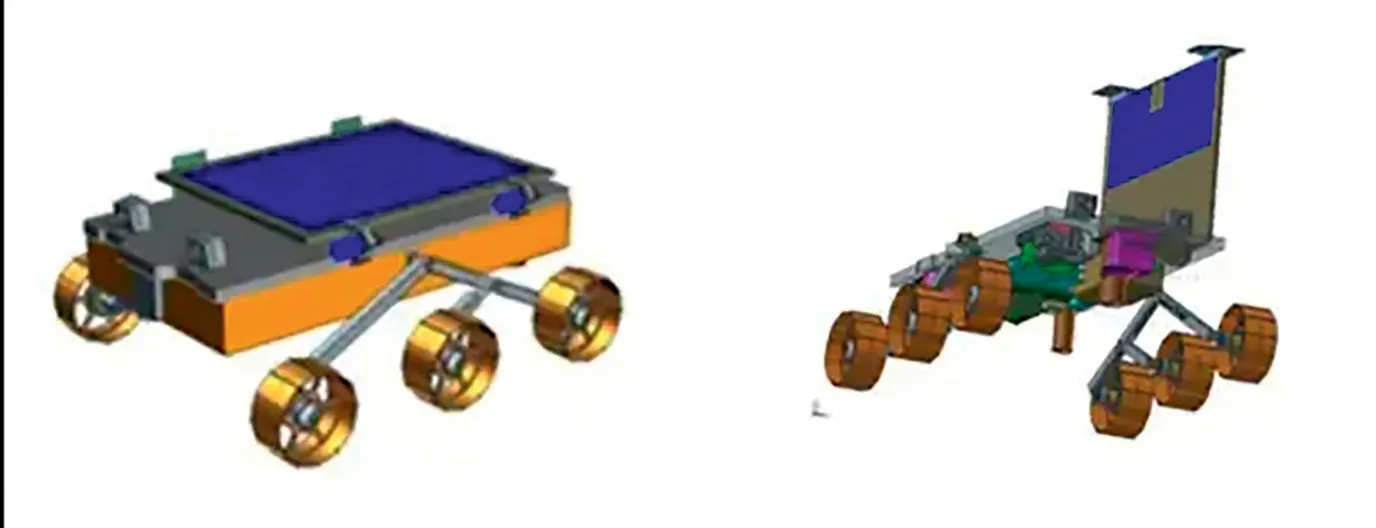
▲ “月船3 号”的3 个部分
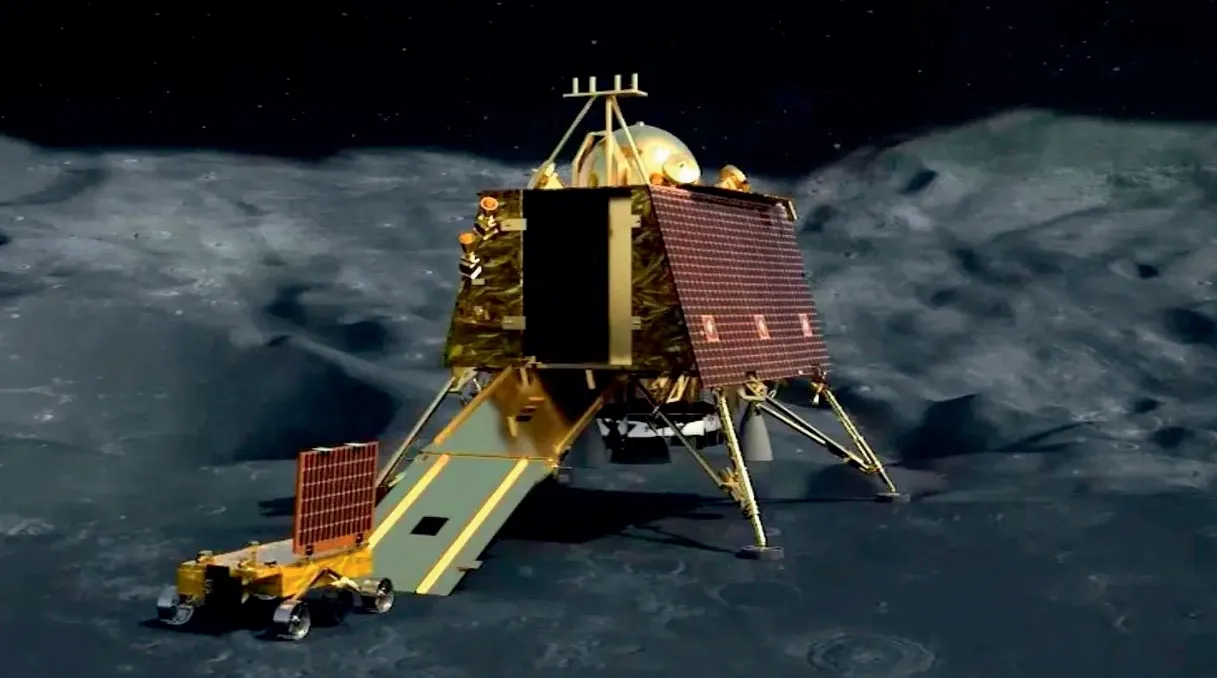
▲ 维克拉姆着陆器在月球表面模拟图
进步与取舍
在4 年前的2019 年9 月6 日,承载着印度登月梦想的“月船2 号”(CHANDRAYAAN-2)着陆器“维克拉姆”在动力下降过程中因为飞控软件故障导致梦碎月球。“维克拉姆”着陆的第一阶段依靠惯性导航组件进行盲降,4 台着陆发动机全推力运行后进入第二阶段,打开全部测量仪器测量盲降后的着陆器轨迹参数,结果工作人员发现盲降阶段减速程度高于预期,着陆器的轨迹无法满足下一阶段着陆要求,飞控故障导致维克拉姆着陆器失去控制,以58 米/秒的速度坠落于月球南极高地。美国月球勘测轨道器的图像表明,着陆器的坠落地点距离预计着陆点仅差600 米。
“维克拉姆”坠落后,印度先是宣布其成功着陆,在多普勒测速数据放出后又宣布“维克拉姆”虽然着地速度过高,但着陆器仍然保持完整,有信号发出,声称轨道器已经与着陆器建立了联系,并且获得了图像。9月17 日,美国月球勘测轨道器飞越着陆区,发现了维克拉姆着陆器爆炸后的痕迹,一些碎片被崩到了2.4千米外,证明该着陆器在毁灭性的地面冲撞中被彻底摧毁。此后,印度又宣称该任务“成功了99%”,甚至宣称自己在2008 年发射的“月船1 号”撞击器先于中国抵达月球,称自己为“第三个抵达月球表面的国家”。
事实上印度人自己也清楚,“维克拉姆”并没有起到任何作为一个月球着陆器的作用,它的科学仪器没有产出一个比特的月球表面数据。因此在嘴炮之外,他们也开始建造第二个登月航天器,这就是“月船3 号”。

▲ 控制大厅的工作人员
“月船3 号”项目于2019 年12月启动,获得了最初的940 万美元资金,但随后受新冠疫情影响,其开发受到了巨大阻碍。印度空间研究组织认为该任务的开发将耗资9000 万美元。由于“月船2 号”的轨道器携带了大量科学载荷,并且寿命大幅延长,得以继续在月球轨道上开展科学探测,因此“月船3 号”的轨道器取消了几乎所有的科学仪器。该轨道器仍然基于I-2K 平台建造,配置可提供758瓦功率的太阳能帆板,使用一台440牛双组元推进器。
“月船3 号”的轨道器负责月球转移轨道提升、月球轨道转移和近月制动,在抵达100 千米环月轨道后与着陆器分离,接下来负责和着陆器进行通信中继,并且运行唯一的科学仪器“宜居行星地球光谱偏振测量”(SHAPE)用于观测地球。该仪器从月球轨道在近红外1-1.7μm 波长范围内对地球进行光谱和偏振测量,设计寿命仅为3~6 个月。
“月船3 号”的着陆器仍然被命名为“维克拉姆”。与“月船2 号”相比,“月船3 号”着陆器质量大幅增加,从1471 千克提升到了1752 千克,加注了更多的推进剂。推进剂质量的提升增加了不少裕度,为着陆器动力下降期间提供更多的容错空间。同时原计划的5 台800 牛着陆发动机中,中心的着陆发动机被取消。
印度空间研究组织主席在访谈中称该发动机的作用之一是吹除着陆点的月尘,但“月船3 号”着陆器被要求以着陆为优先,因此改进了着陆器,使其可以容忍这一问题。同时印度空间研究组织也做了取消中心发动机的着陆测试,结论是使用4 台发动机也足以实施月球软着陆。有一些消息指出印度为该发动机配置了 40%~100%的四档阶梯式变推力模式,但是另一则文献指出,该着陆发动机只能提供额定推力的80%节流推力,因此“月船 3 号” 着陆器仍然需要通过一系列着陆发动机的开关来减缓下降速度,而不是以类似“嫦娥三号”那样的单台连续深度变推力发动机着陆方案。
针对上次出现的故障,印度原计划在“月船2 号”上配置进口激光多普勒测速仪,但是因为对印度的出口限制,未能买到而作罢,只使用了精度较低的微波多普勒测速仪。在“月船3 号”任务中印度在着陆器上配置了国产的激光多普勒测速仪,并且增加了额外的摄像头以监控着陆器状态。
▲ 着陆器正在微波暗室中测试巡视器分离

▲ 测试中的“月船3 号”
“月船3 号”着陆包括4 个阶段,和“月船2 号”的时序相似。动力下降的第一阶段被称为“粗略减速阶段”,着陆器在T+0 秒、高度30 千米、距离着陆点745.5 千米时打开全部4 台发动机开始动力下降,此时水平速度为1.68 千米/秒。“粗略减速阶段”持续690 秒,在此阶段着陆器航行713.5 千米。“粗略减速阶段”结束时着陆器高度7.4 千米,水平速度为358 米/秒,垂直速度61 米/秒。着陆器进入长10 秒的“姿态维持阶段”,打开激光和微波测速测距仪开始测量着陆器姿态。在该阶段结束时着陆器高度6.8 千米、水平速度338 米/秒、垂直速度59 米/秒、距离着陆点28.52千米。随后进入“精细减速阶段”,该阶段持续195 秒,结束时着陆器速度减为零。随后进入“最终着陆阶段”。此时着陆器距离月球表面高度1000 米并且悬停12 秒,随后开始低速下降并且扫描着陆点。1038 秒时着陆器下降至150 米高度时继续悬停22 秒,扫描着陆区并且判断着陆点是否满足,如果满足的话着陆器就会继续下降,在动力下降开始后第1122~1180 秒着陆在月表。如果不满足,着陆器会重新选择一个着陆点并且横向移动150秒,在动力下降开始后1171 秒着陆。
在“月船3 号”的着陆流程中,虽然有人认为没必要在动力下降阶段安排一个盲降段,但对于月球南极复杂的地形来说,在长距离动力下降过程中测速测高设备可能会因为地形变动导致极其离谱的数据跳变,如果程序有缺陷或者滤波没做好可能会导致程序故障,引发任务失败,如今年4月着陆失败的日本的“白兔-R”。
而“月船3 号”的改进方向并不在于如何解决盲降阶段测量精度的问题,而是变成了如何在导航或测量出现问题的情况下着陆。因此对“月船3号”着陆器的着陆腿结构进行了加强,同时增加了着陆器太阳翼的面积和测控天线的数量,并且增强了着陆器通信天线和月球车的电量,以保证探测器即使遇到计划外的着陆地貌也能完成数据下传。印度空间研究组织还在“月船3 号”的导航程序中嵌入了盲降程序,该程序可以在动力下降阶段出现非致命故障时放弃原定着陆点进行盲降。总而言之,“月船3 号”任务以着陆月球为第一要义,并且针对该目标增加了大量内容,力保月球着陆不容有失。
“月船3 号”的成功对于印度航天来说是一个重要的里程碑。一方面,它的成功为未来月球南极复杂地区多发并联着陆制导算法提供了宝贵的经验,为以后在更远月球极地地区着陆提供了解决方案。另一方面,鉴于未来日印合作月球极地探测任务也使用了多发并联着陆技术,基于此项技术的扩展可以用于更大的月球着陆器,乃至火星着陆任务。