探测器落月,为什么还这么难?
2023-09-16张晨
文/张晨
2023 年8 月19 日,研制超过20 年的俄罗斯月球着陆探测器“月球25 号”在执行降低环月轨道操作时出现异常,后证实该探测器在计划84 秒的点火过程中因为发动机无法正常关机,实际工作了127 秒,导致探测器无法维持环月轨道,坠落在月球表面,这是近几十年来唯一一个在环月轨道阶段损失的月球着陆器,也是新世纪以来第5 个损失的月球着陆器。
看起来似乎登陆月球是一件异常困难的事,但是1969 年人类就登上了月球,并且在随后将无人探测器送上了金星、火星、小行星和土卫六,然而自1976 年苏联“月球24 号”任务结束,到2013 年中国的嫦娥三号探测器成功着陆月球北部虹湾,其间37 年没有探测器着陆月球。2018 年中国嫦娥四号探测器成功着陆月球背面,2020 年“嫦娥五号”圆满完成月球采样任务并成功返回地球。在中国创造这些完美记录的同时,一些国家也开始谋划自己的月球着陆计划,比如印度、以色列、日本等。美国也以商业月球运输服务(CLPS)开展了自己的月球着陆计划。但进入新世纪以来,人类月球探测器着陆任务以失败告终者超过半数。这引发了人们的一个疑问:既然人类早在50 年前就抵达了月球,那么相对容易的探测器着陆月球为什么还这么难呢?
上帝不眷顾以色列
创世纪号月球探测器(Beresheet)是以色列航天局(SpaceIL)和以色列航空航天公司(IAI)共同研制的月球着陆器,也是21 世纪发射的第三个月球探测器和第一个失败的月球着陆任务。
“创世纪号”发射质量585 千克,高1 米,直径2.3 米。推进系统采用一台燃烧一甲基肼和绿色四氧化二氮的LEROS-2B 推力器,推力407 牛,真空比冲318 秒。探测器还携带有以色列研制的磁力计,以及美国宇航局提供的角反射器,用于精确测量地月距离。
“创世纪号”项目总计耗费9000万美元,大部分由犹太富翁出资。该探测器旨在参与谷歌发起的月球大奖赛X,以色列航天局掏了一点钱支持。由于探测器本身没有主动热控,因此只计划在月面存活48 小时并且拍摄月球表面照片,还计划在月球上进行一次跳跃以展示重新定位能力。
2019 年2 月22 日“创世纪号”和印尼通信卫星Nusantara Satu 以及S5 小卫星一同搭乘“猎鹰9”升空。火箭将3 个载荷送入预定的超同步转移轨道,随后探测器通过4 次轨道机动提升进入月球转移轨道。2019 年4月4日探测器完成捕获,进入月球轨道。
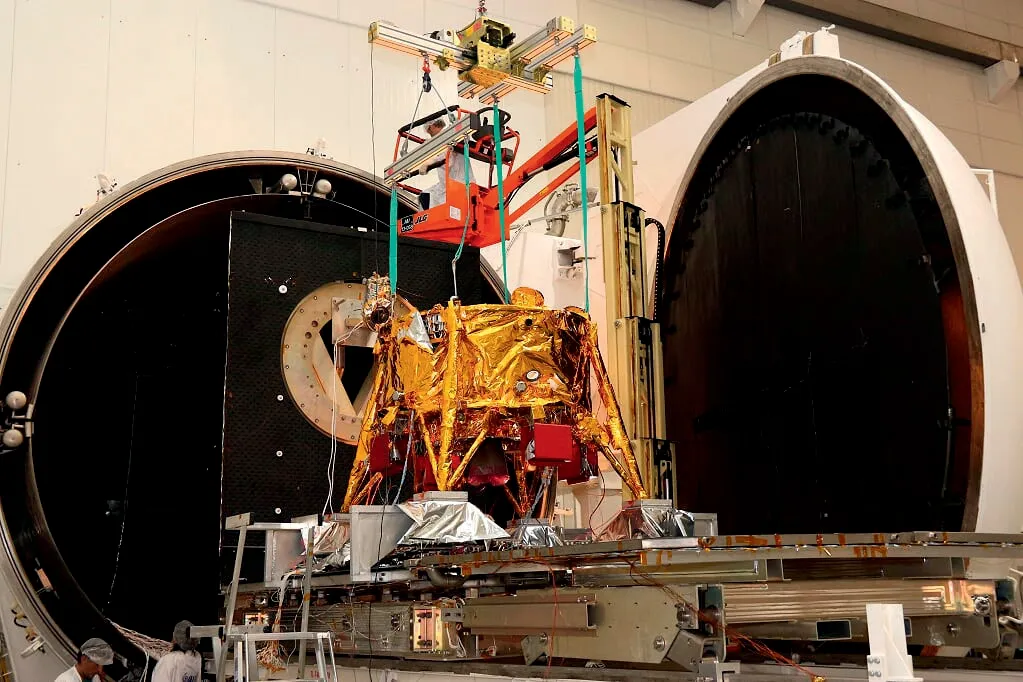
▲ “创世纪”号探测器在热真空罐中试验
动力下降开始于2019 年4 月11日。由于LEROS-2B 不是一台连续变推力发动机,探测器采用一定长度脉冲组合的方式进行动力下降。探测器上惯性测量单元(IMU)出现故障并关机。惯性测量单元通过陀螺仪和速度计测量航天器姿态、速度和航程。因为航天器的惯性测量单元配置有冗余,损失一台惯性测量单元并不会影响月球着陆。但是地面站决定上行指令重启2 号惯性测量单元,但要命的是重启指令中存在错误,飞控关闭了发动机。

▲ 搭载在“创世纪号”上的激光角反射器
虽然最终发动机重启成功,但探测器无力减速,创世纪号探测器以140 米/秒的速度撞上了宁静海的月表。在美国月球勘测轨道器飞越着陆区时,只在32.5956° N、19.3496°E 的位置发现了一个大坑。很可惜,“创世纪号”是进入本世纪以来月球着陆失利任务中问题最简单的,如果飞控没有程序问题,可能就成功了。
以色列人曾经计划研制第二个着陆器,被命名为“创世纪2”,还和“萤火虫航天”签订了合作协议,但是由于犹太富翁不再向该项目出资,项目最终被迫取消。
印度“月船2 号”着陆失败
在新一轮月球着陆浪潮中,印度算是参与比较早的国家。“月船”是印度空间研究组织开发的月球探测器的名称。2008 年10 月,月船1 号探测器发射升空并成功进入月球环绕轨道。由于探测器电源故障,探测器仅运行了设计寿命的一半就失去了联系,但印度仍然宣称该任务成功了95%。

▲ 创世纪号探测器在撞击月表前拍下的最后一张照片
新的着陆探测器被称为“月船2号”。起初印度计划和俄罗斯合作,由俄罗斯研制着陆器,印度研制轨道器、巡视器和科学载荷。俄罗斯计划为“月船2 号”着陆器配置一台具备深度变推力能力的发动机,探测器发射质量仅为3 吨左右,可以由印度本土GSLV 运载火箭发射。
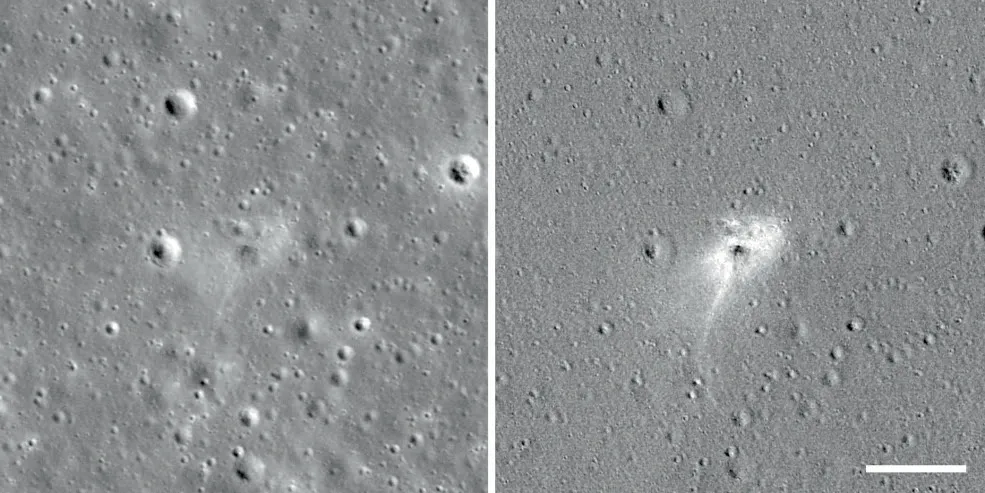
▲“创世纪号”坠落产生的撞击坑,由美国月球勘测轨道器拍摄

▲准备扣罩的“月船2 号”,这是印度当时最复杂的航天器
但俄罗斯研制着陆器的进度缓慢,印度空间研究组织决心独自研发月球着陆器,而印度的科研实力不足以研发深度变推力发动机,因此着陆器改为采用由5 台440 牛远地点发动机改进来的800 牛推力器,在一些报道中宣称这些发动机具有40%~100%的变推能力,但在另一些文件中这些发动机只有80%~100%的变推能力,因此印度使用通过改变发动机开关数量和小范围调节推力以实现对连续变推力曲线的近似拟合。
“月船2 号”于2019 年7 月22日发射升空,2019年9月6日着陆器“维克拉姆”进行动力下降,但着陆器在着陆期间突然翻滚,最终梦碎月球。

▲ “月船2 号”,可以看到其3 台着陆发动机
“维克拉姆”着陆的第一阶段被称为“粗略减速阶段”,着陆器依靠惯性测量单元进行盲降,4 台着陆发动机全推力运行。“粗略减速阶段”结束后进入“姿态维持阶段”。在此阶段着陆器保证姿态不变,通过微波测速测距仪和激光测距仪测量着陆器状态,此时发动机推力在包线上缘运行,但为了维持着陆器姿态没有进行着陆器速度修正。接下来进入第三阶段“精细减速阶段”,在此阶段调姿速率上限被设定为10°/秒,在前序误差累积的影响下,由于调姿过慢,调姿结束后着陆器水平速度过低,垂直速度过高。飞控发现着陆器无法抵达预定着陆点,飞控在无法同时满足着陆器在当前轨迹下着陆至预定点,于是直接崩溃,随后“维克拉姆”着陆器失去控制,以58 米/秒的速度坠落于月球南极高地,位于70.8810°S、22.7840°E,美国月球勘测轨道器的图像表明着陆器的坠落地点距离预计着陆点仅600 米。
对于月球南极复杂的地形来说,在长距离动力下降过程中测速测高设备可能会因为地形变动导致极其离谱的数据跳变,如果程序有缺陷或者滤波没做好就会导致程序故障,引发任务失败。因此,如果对自己的测高仪不够自信的话,采用盲降策略是很好的办法,但需要精度够高的惯性测量单元。整体看下来,“月船2 号”着陆的失利有运气不足的成分,也有软硬件不够智能的成分。比如说几个测速测距仪必须恒定指向对月测量,着陆器也不能一边测量一边修正。
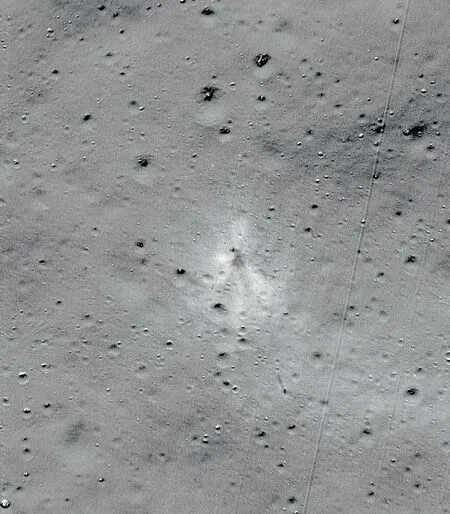
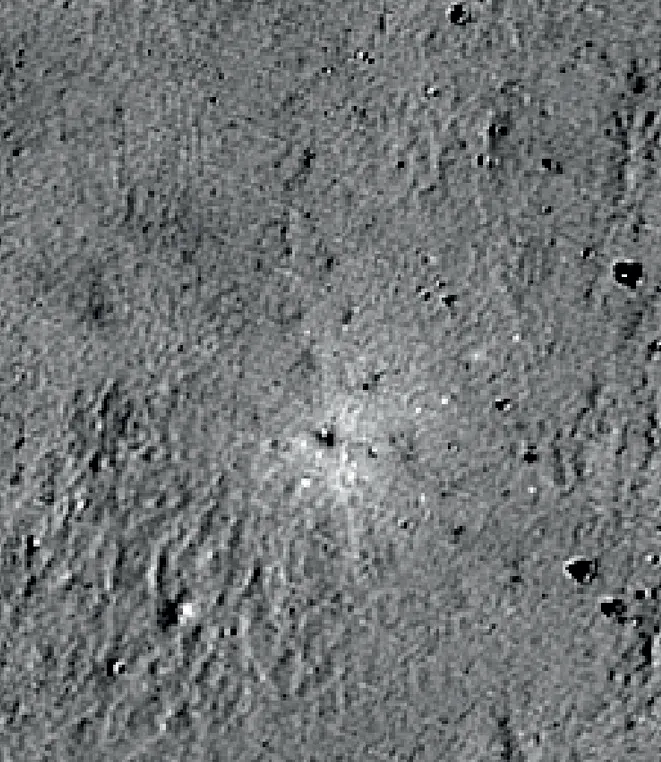
▲ “月船2 号”坠落并爆炸的痕迹,由美国月球勘测轨道器拍摄
▲ “好客号”微型月球着陆器
日本“好客号”夭折的创新
日本也曾有一个庞大的月球着陆探测计划,也就是月球女神2 号任务,但它的经费被挪用去开发日本情报收集卫星IGS。但日本宇宙航空研究开发机构仍然开发了一些小型月球着陆探测器,比如“好客号”。该探测器于2022 年11 月搭乘美国SLS 火箭发射升空。“好客号”本质上是一个14千克重的6U 立方星。如果放在别的地方它可能只是一个平平无奇、无人关注的小卫星,但作为人类历史上最小的月球着陆探测器,“好客号”在其设计中拥有足够的亮点和创新性,不乏一些大胆的设想,是一个十分有趣的探测器。
“好客号”虽然只重14 千克,但其由3 个部分组成:7 千克的巡航级、6 千克的动力下降单元和1 千克的着陆器。巡航级内还安装有一套反作用飞轮和一套由两组推力器构成的冷氮气推进系统。该立方星内携带了UHF、X 和S 波段总计4 套通信设施,并且着陆器上还搭载了相机和辐射计用于研究月球表面辐射环境和土壤。该探测器上甚至还携带了原子钟和一套激光点火装置。该探测器贯彻了日本深空任务“麻雀虽小五脏俱全”的设计思路,而如此多的设施能够集成在一颗14 千克的6U 立方星内,实在令人对日本的微型化技术感到震惊。
由于6 千克的动力下降模块肯定不能像传统探测器一样使用双组元常压式挤压推进系统,而1 千克的着陆器上也无法携带任何测高测速装置,因此“好客号”着陆器在与巡航级分离后,以类似“神风特攻”的方法点燃固体火箭减速2500 米/秒,然后展开气囊进行半硬着陆。此阶段完全不依靠任何测量装置,对着陆精度和接地速度的要求也比一般探测器放宽许多,它将验证日本宇宙航空研究开发机构的分布式微纳深空探测系统的可行性。
与SLS火箭末级分离后,“好客号”突然进入了高达80°/秒的自旋,并且很不幸,它的自旋方向使得太阳能帆板背对太阳,因此无法充电。高速自旋使得探测器的星敏感器等全部饱和,因此冷气推力器无法介入控制,而依靠反作用轮无法完成姿态纠正。马德里深空站曾经断断续续收到“好客号”挣扎的信号,但随着探测器沿着奔月轨道越过预计的修正点,一切都不可挽回了。
对于“好客号”的失联,有一个不小的可能是对这些小卫星按顺序分离的近场安全性分析并不完备,导致一些立方星被弹射出去时撞上了适配器,引发了远超预期的扰动。日本宇宙航空研究开发机构曾称到2023 年3月“好客号”的太阳能板可能会朝向太阳得以充电,但长达半年的深空航行中低温将会严重破坏探测器的电子设备,因而唤醒的概率无限接近于0。
日本“白兔-R”的遭遇
“白兔-R”(Hakuto-R)月球探测器是由日本私营商业航天公司iSPACE设计建造的小型着陆探测器,于2022年12 月11 日搭乘猎鹰9 火箭发射升空,经过低能转移轨道后抵达月球,在2023 年4 月25 日尝试着陆月球。该探测器携带了阿联酋的月球巡视器“拉希德-1”号和LEV-1 两轮月球巡视器。但探测器在着陆前失去联系,坠落在月球表面,任务失败。

▲ 肯尼迪航天中心的工作人员正在往SLS 火箭适配器上安装立方星

▲ “白兔-R”月球着陆器
“白兔-R”是日本私营深空探测公司iSPACE 参与谷歌月球大奖赛X的项目白兔号探测器的重启。该探测器由iSPACE 公司设计,依靠阿里安宇航公司在德国的供应链完成了组装,随后被运输至卡纳拉维拉尔角发射。
“白兔-R”探测器发射质量1 吨,干重340 千克,配置6 台200 牛推力器用于轨道机动和着陆月球。该探测器采用低能转移轨道方案以减少探测器近月制动所需的燃料量和航天器的复杂度,因此奔月过程长达3 个月,“白兔-R”直 到2023 年3 月21 日才进入月球轨道。计划目标着陆点位于47.5° N、44.4°E 的阿特拉斯撞击坑附近。
“白兔-R”早期计划着陆地点是位于37.56°N、30.8°E 的“梦之湖”地区,动力下降轨迹地形数据并未根据新的着陆点予以调整。动力下降开始后,航天器的主控计算机开始采集高度计的数据用于判定轨迹。在探测器飞越一个陨石坑时,高度计扫过陡峭的悬崖时得到了高度数据突跃,然而飞控计算机认为高度计出现突跃是高度计故障的表现,因此关闭了探测器高度计,开始完全依靠惯性测量单元数据进行盲降。
惯性测量单元在动力下降开始时测量的探测器高度比实际高度低3 千米,而动力下降段结束时,探测器依靠惯性测量单元数据认为自己已经接近月表,进入缓速下降阶段。但实际上这个高度比实际的月面高度高出了整整5 千米。探测器以“已经接近月表”的认知缓慢下降准备接地,下降了一段后燃料耗尽,最终坠落在月球表面47.581°N,、44.094°E 的位置,摔成了四大块。
“白兔-R”的失败是多种疏忽和失误共同造成的。惯性测量单元误差较大,可能是由于采购的商业器件不适合长期深空飞行而导致精度过低,这是着陆失败的直接原因。而因为数据跳变就直接隔离高度计的飞控在故障判读和隔离上堪称失职,因此飞控软件的问题也促进了着陆失败——倘若高度计没有隔离的话,探测器仍然能够获得实时高度数据,或许就不会失败。本质上,“白兔-R”的着陆器完全没有经过测试,完成总装后直接运往发射场准备发射。对测试的忽视是导致月球着陆失败的根本原因。
与其怪罪构架,不如认真测试
因为阿波罗计划中的登月舱和我国“嫦娥工程”中均使用连续深度变推力发动机并且均获得全胜,有一些观点认为,着陆月球必须使用连续深度变推力发动机才能取得成功。这个结论无疑是片面的。
固定推力脉冲或多发变推力着陆策略广泛应用于苏联月球探测器和美国火星探测任务。不可变推力的KTDU-417 助推苏联2 个月球巡视器和3 次采样返回任务取得成功,而单组元脉冲变推力发动机广泛应用于美国火星探测任务,从1976 年的“海盗1 号”到最新的毅力号火星巡视器,证明并非连续深度变推力发动机才能完成稀薄大气地外天体软着陆任务,脉冲方案也可以胜任。
但相比连续深度变推,脉冲方案需要调整脉冲长度和时间,同时多次开闭对系统的可靠性要求较高,连续启停阶段推力室内混合比变动大,燃烧稳定度和推力控制精度较差。在登月过程这种容错较小的环境下,使用连续深度变推可以提供更好的推力平滑度和调整能力,并且其具备“悬停”能力,能够更好地规避复杂月面环境,尤其是在月球南极这种复杂地形下着陆的情况。
▲ “白兔-R”的残骸撒在月球上
从苏联“月球9 号”借助气囊软着陆月球,到登月舱下降发动机轻柔地将“阿波罗11 号”的“鹰”号登月舱着陆在宁静海,再到7500 牛变推力发动机推动“嫦娥四号”着陆在月球背面,这些任务的成功,离不开大量的资金投入、系统测试、故障排除,乃至航天器的损失。
苏联的“月球9 号”是该系列中第十二个发射的探测器,前面十一个全部损失了。美国在阿波罗计划之前的“勘探者号”和“徘徊者号”系列也是损失惨重,最后依靠资金投入研发的登月舱下降发动机实现了1:10 深度变推,保证阿波罗登月舱成功着陆。这些航天器都经过了无数的测试,仍然在飞行过程中可能出现一些问题,需要现场解决。
反观21 世纪的月球着陆任务,除去因为运载火箭而失败的“好客号”任务,另外几个都存在测试、软件和硬件的不足,不够精确的惯性测量单元、互相干扰的飞控、意外关机的指令等造就了21 世纪月球着陆任务的数次失败。目前看来,以色列、日本和印度都缺乏在大引力天体着陆的工程经验,理应添加足够的冗余。但由于经费和运载火箭性能限制,三国均选择了建造较小的航天器,导致航天器本身质量受限、冗余不足。在航天器设计和生产时对容易产生单点故障的位置故障分析和隔离研究做得不够,同时投机心态又使得对航天器的测试不足,故障完全无法在地面测试中暴露,所以在真正开始动力下降的时候,自然就接二连三地出问题了。