基于大-小给水调节阀切换的直流蒸汽发生器过热度控制
2023-09-16季晨龙黄雨瑶
季晨龙,黄雨瑶,李 良
(1.中国人民解放军海军装备部, 北京 100071;2.武汉第二船舶设计研究所, 湖北 武汉 430064)
0 引 言
直流蒸汽发生器具有结构简单、热效率高、机动性好等优点,适用于船舶核动力装置,近年来得到了国内外学者的广泛研究。其出口蒸汽过热度影响了热力循环效率和管道的安全性等,对蒸汽过热度的有效控制,为保证船用动力装置运行的高效性和安全性具有重大意义[1]。目前对于蒸汽过热度控制的研究相对而言较少,Zhe 等[2]采用饱和输出反馈耗散控制律调节氨流量进而控制出口蒸汽过热度;胡晓杰等[1]采用3 冲量控制方法,将蒸汽温度、蒸汽流量、主给水流量作为输入量,主给水阀调节开度作为输出量控制蒸汽过热度;苑源等[3]设计了蒸汽压力和过热度控制系统,通过控制主冷却剂泵转速控制蒸汽压力,控制主给水泵转速控制蒸汽过热度[3],仿真结果表明该控制方案是可行的,只是一般情况下不控制冷却剂泵转速。已有的方法因应用的局限性和控制效果不足,均未满足船用动力装置要求。
本文在大-小阀切换系统的框架下研究直流蒸汽发生器过热度控制问题。介绍蒸汽过热度模型及过热度控制策略,根据大-小给水阀的配置,提出2 种过热度切换控制策略,并采用工程算例对提出的切换控制策略进行对比验证。
1 蒸汽过热度控制策略
直流蒸汽发生器给水流量到出口蒸汽流量的传递函数[4]:


表1 参数说明表Tab.1 Parameter description table
基于对蒸汽过热度模型的分析,蒸汽过热度通过给水流量控制实现,给水流量通过给水阀进行调节。但实际工程中给水泵转速、蒸汽压力等因素也很容易引起给水流量的波动,故引入串级控制系统,提升给水流量控制的稳定性,改善控制系统的控制效果。图1为蒸汽过热度的控制框图,控制逻辑过程如下:1)根据当前蒸汽温度、压力,计算当前蒸汽过热度ΔT;2)根据蒸汽过热度设定值,计算蒸汽过热度偏差;3)根据过热度偏差,计算给水流量需求值Q*w(控制器1 实现);4)根据当前给水流量测量值,以及给水阀流量特性,计算给水调节阀输出开度(控制器2 实现)。

图1 直流蒸汽发生器蒸汽过热度控制框图Fig.1 Diagram of steam superheat control of once-through steam generator
2 基于大-小给水调节阀切换的直流蒸汽发生器过热度控制
如图2 所示,船用核动力装置采用大-小给水调节阀并联配置的方式保证直流蒸汽发生器的机动性和精确性。对于大-小给水调节阀并联的配置,控制系统存在分程切换、开度分解2 种控制方式,前者在单个控制周期内只有单台阀动作,后者则同时动作。
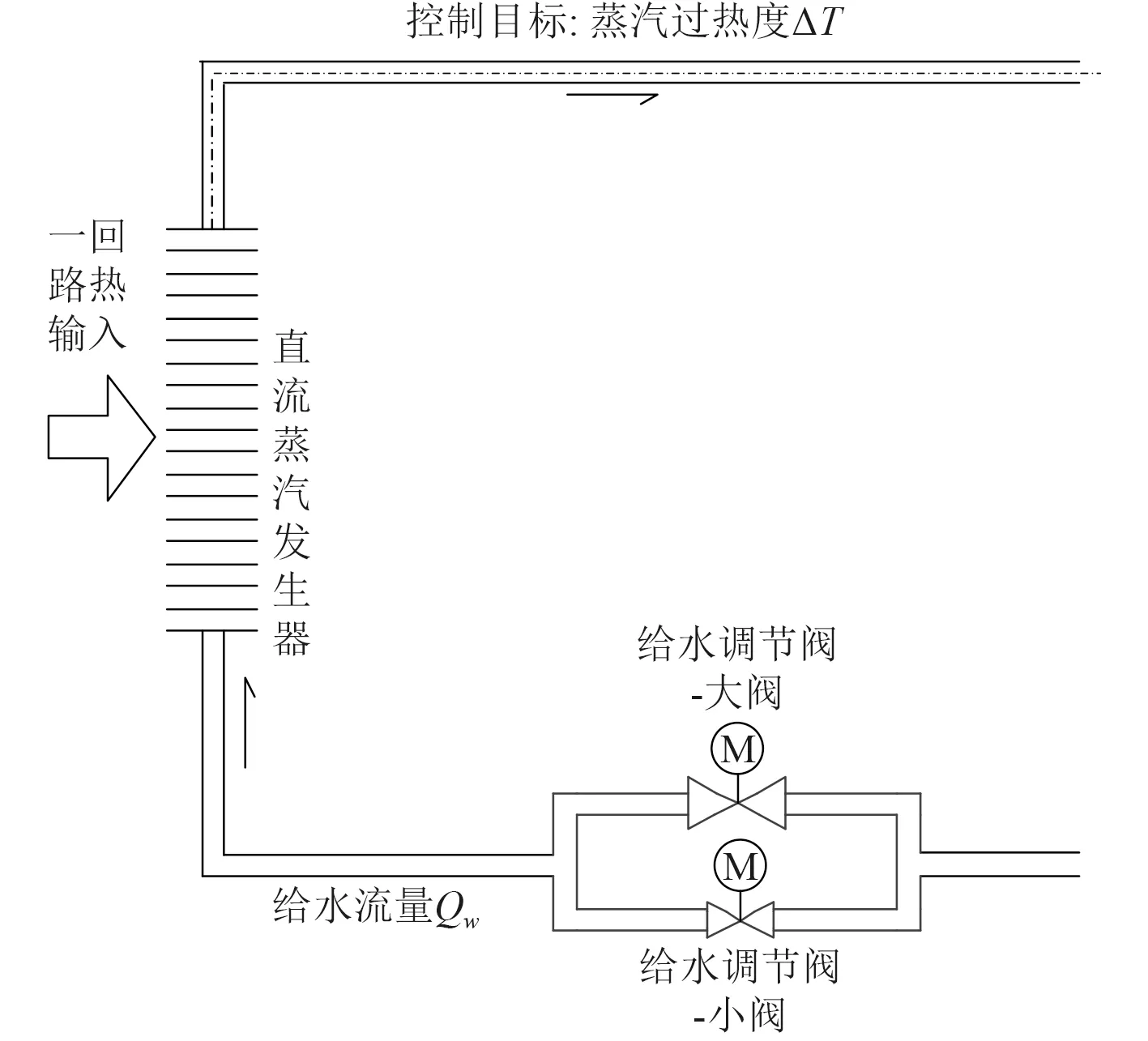
图2 直流蒸汽发生器蒸汽过热度控制框图Fig.2 Diagram of steam superheat control of once-through steam generator
2.1 大-小给水调节阀分程切换策略
分程控制系统是指由1 个调节器的输出去带动2 个或2 个以上的调节阀[5]。蒸汽过热度控制系统中大小给水调节阀的控制作用相同,其分程控制示意图与图3 一致。由图中可知,分程控制系统中存在1 个分程点m,在调节器输出信号达到分程点之前,小阀的开度随控制器输出信号的增大而增大,当输出信号达到分程点时,小阀同时达到满量程并保持该状态不变;输出信号大于分程点时,大阀的开度随控制器输出的增加而增大直至达到满量程。
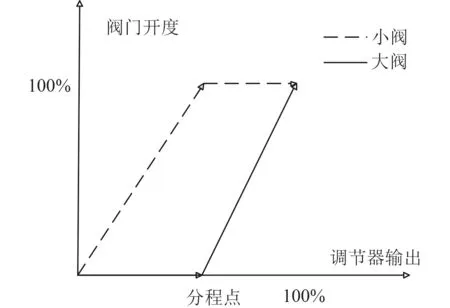
图3 分程控制示意图-阀门同向动作Fig.3 Schematic diagram of split control - valves act in the same direction
2.2 大-小给水调节阀开度分解切换策略
为了保证全工况给水的精确性和快速性,提出大-小给水调节阀开度分解切换策略,即在单个控制周期内将2 种不同尺度的控制方式作用于同一控制对象。图4 为其控制框图,逻辑过程如下:根据系统运行数据和过热度控制逻辑得到给水流量需求值(控制器1 实现),需求值与当前给水流量信号作偏差,将得到的偏差信号e分解为小尺度的偏差信号e1和大尺度的偏差信号e2(偏差分解模块实现)。其中,小尺度的偏差信号e1送至给水调节小阀控制器,通过调节小阀开度消除该项偏差;大尺度偏差信号e2送至给水调节大阀控制器,通过调节大阀开度消除该项偏差。
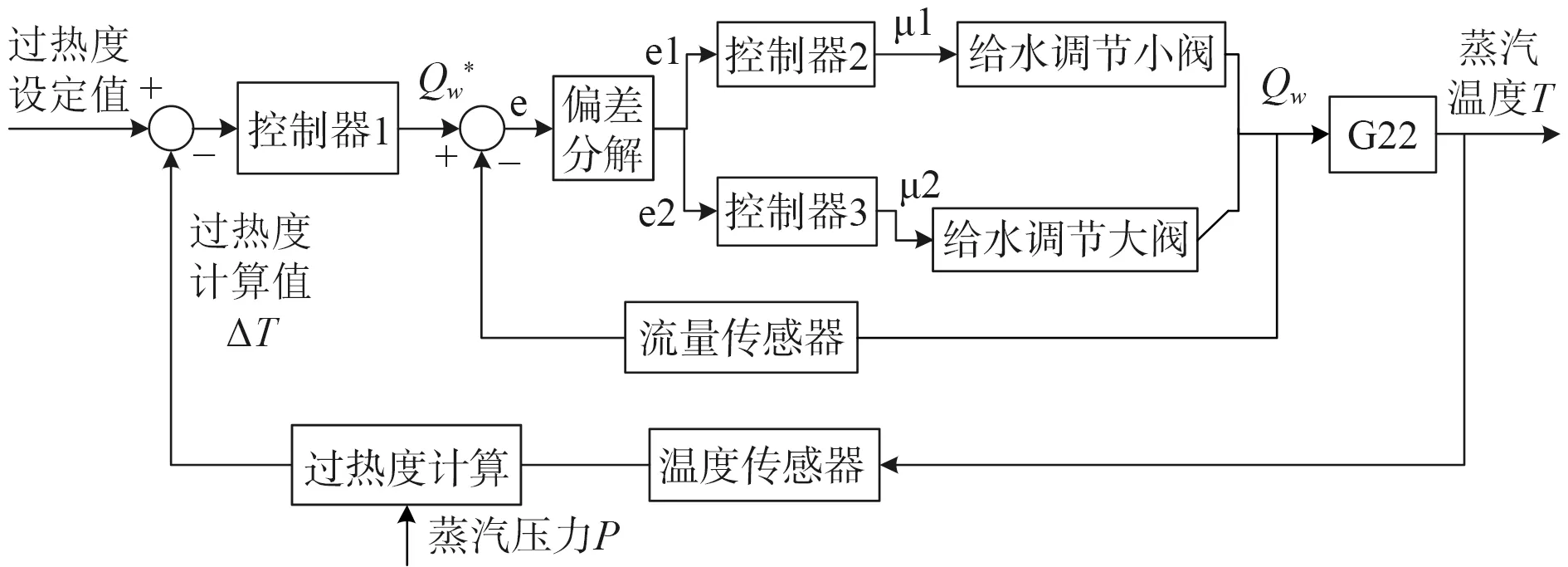
图4 开度分解切换控制框图Fig.4 Opening decomposition switching control diagram
其中,偏差分解模块将偏差信号分解方式为:
sign 为求符号运算,mod 为求模运算,m为信号分解的阈值,阈值根据具体阀门流量特性进行选择。
3 仿真验证
为了比较2 种切换控制策略的控制效果,采用工程算例进行验证,控制器均选用PI 控制器。其中给水调节大小阀均取线性阀,由于为并联配置,其两端压差一致,考虑该压差不变,则取阀门开度与给水流量的关系如下:
式中:l为阀门开度;Q大和Q小为阀门开度为l时通过给水调节大阀、小阀的流体流量,t/h。
为了区分给水大小阀的精度,取大阀开度的精度为1%,即分度值为1%×232=2.32,而小阀开度的精度为0.5%,即分度值为0.5%×58=0.29。
为了定量地评判控制系统的控制效果,引入性能指标函数如下[7]:
该指标包括了控制过程中的快速性和精确性指标,适合本章的评判准则。当控制系统的指标函数值越小,其控制效果越好。
3.1 给水调节大阀的控制系统仿真
首先考虑只用给水调节大阀调节给水流量的情况,设定过热度的控制指标为35,以式(7)为指标函数对PI 控制器的控制参数进行整定,则通过线性寻优得到的结果如下:
根据控制参数,得到的控制系统仿真结果如图5所示。设定初始给水流量较小,过热度值较大,此时给水阀快速补水出现了较大超调,在10 s 时基本稳定达到设定值。为了检测控制系统的抗干扰能力,在60 s时加入了扰动信号,过热度增大,控制器调节给水阀增大开度进行补水,系统在155 s 时再次达到稳定状态,调整时间较长。控制系统的性能指标函数值为3.260 0E+04,可知该系统抗干扰能力较差。图中过热度一直存在较小的波动,该波动是由给水调节大阀的精度引起的。
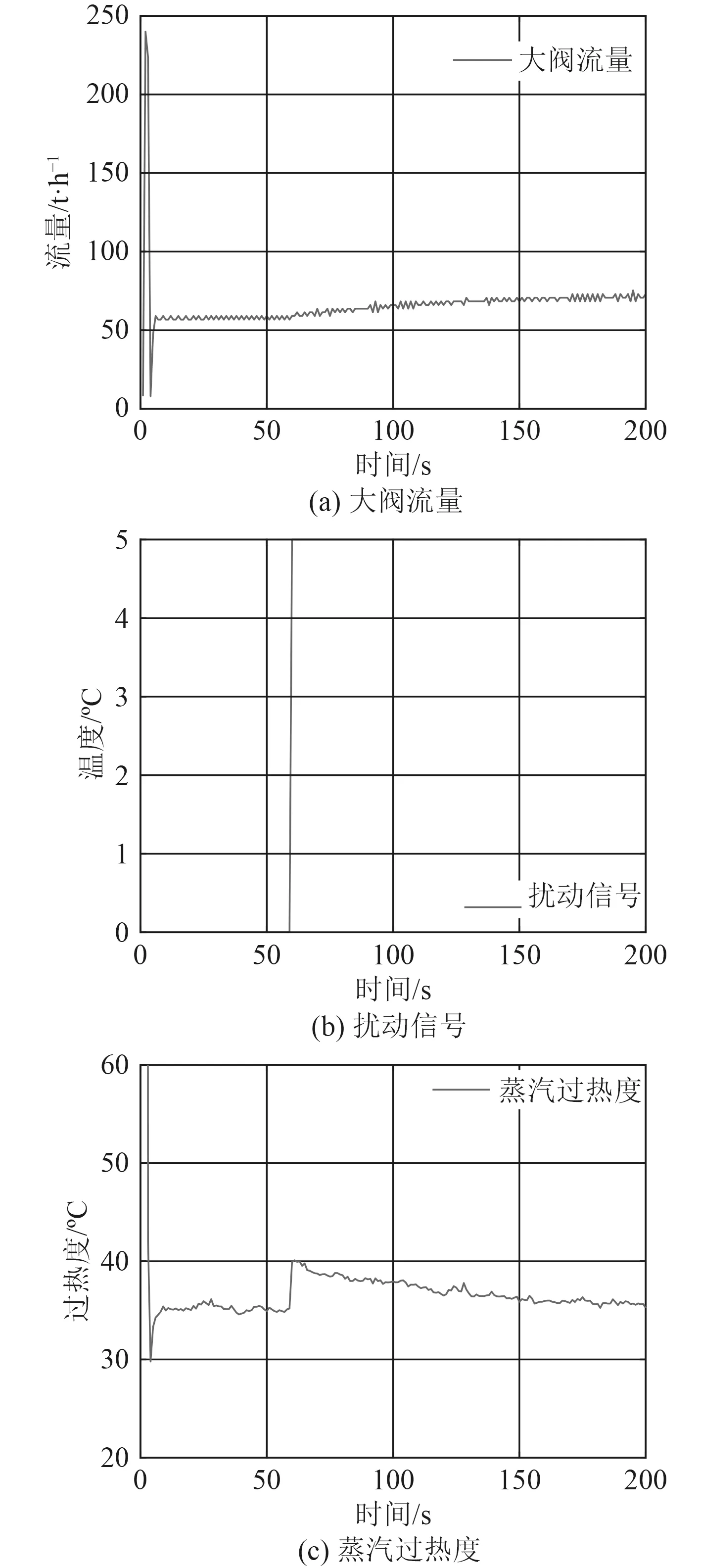
图5 单个给水阀的控制效果Fig.5 Control effect of single feed valve
3.2 大-小给水调节阀分程控制仿真
对于分程控制系统,最重要的是找到合适的分程点,使大小给水调节阀切换时整个流量管路的流量不引起突变,且尽量保持整个管路的流量特性曲线平滑[5]。由于本节选取的给水调节大小阀均为线性阀门,将大小阀并联管路看成一个整体,则总管路的理想流量特性也为线性。根据给水调节阀开度与流量的关系式,则并联管路的理想流量特性公式为[6]:
由于并联后管路最大总流量为 2 个阀门最大流量相加,最小流量为2 个阀门最小可调节流量相加。故边界条件为:当I=0 时,Q理,0=Q小,0+Q大,0=10,当I=1 时,Q理,0=Q大,100+Q小,100=240+60=300,代入上式有
则式(11)为并联管路的理想流量特性公式,而当分程点为m时,实际并联管路的总流量为[5]:
选取不同的分程点m,可得到不同的并联管路流量特性曲线,若得到的曲线与理想流量特性曲线Q理差距最小,并联管路总流量的曲线平滑性也能得到保障,即
根据式(13)和式(14)进行线性寻优得到的最优分程点为m=20%。图6 为选择不同分程点时管路的流量特性曲线,从图中可以看出与m=10% 和m=60%相比,当选择20%为分程点时,期望曲线与实际得到的并联管路流量特性曲线的面积差最小,且得到的流量特性曲线也最平滑。

图6 不同分程点得到的并联管路流量特性曲线Fig.6 Flow characteristic curves of parallel pipelines obtained at different range points
基于分程控制策略和已辨识的模型建立仿真模型,并以需求开度信号m=20%为切换信号。根据线性寻优的方法,使性能指标函数最小时,得到的控制系统参数值为:
图7 为大小给水调节阀分程控制的仿真结果。初始状态,过热度较高,大小阀很快达到满量程,导致过热度快速降低,并低于设定值,在一段时间的超调后,阀门开度减少,小阀进行流量调节,过热度在40 s时达到预设值并保持稳定。在60 s 时加入了同样的阶跃扰动信号,小阀达到满量程,大阀增加开度进行补水,系统的稳定时间为20 s。且经仿真,JITAE(2)=2.6336E+04,比单个调节阀控制系统的控制效果好。分程控制系统在进行大量快速补水时调节大阀开度,少量精确补水时调节小阀开度,能很好的改善控制效果。由于分程系统在小阀开满之后加入大阀进行调节,避免了给水管路中因大小阀切换带来的给水流量大幅波动,使系统相对稳定,且控制系统出现扰动时,抗干扰能力也较强,能快速保持系统稳定。
3.3 大-小给水调节阀开度分解切换控制仿真
同样以性能函数为指标,通过线性寻优的方法得到偏差分解模块中信号分解阈值m为0.758,控制器参数如表2 所示。
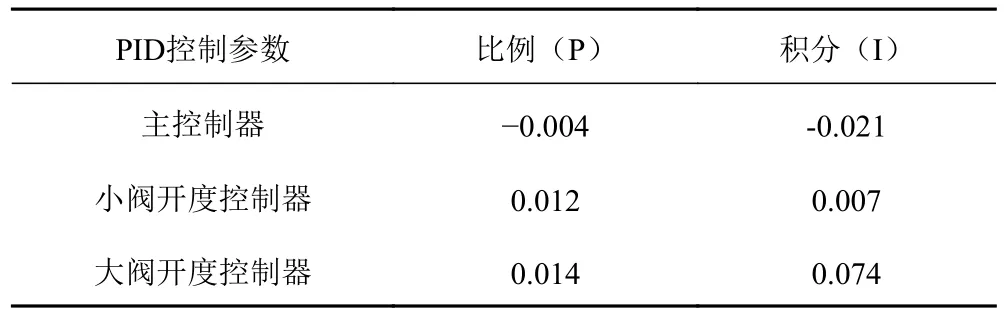
表2 开度分解切换控制系统PI 参数Tab.2 PI Parameters of opening decomposition switching control system
对该控制策略进行仿真,控制系统仿真结果如图8所示。初始状态,蒸汽过热度较大,总给水流量需求值为58。根据图4 开度分解切换控制框图,其中小阀的调节量为0.392,大阀的调节量为57.608,大小阀同时进行调节,系统在30 s 时过热度达到稳定状态。在60 s 时加入扰动信号,需求流量变化幅度较小,处于缓慢增长的状态,此时流量偏差值小于阈值,小阀缓慢动作了0.5%的开度,直至在75 s 时给水偏差值达到大阀的调节范围内,大阀较快补水,使流量偏差值再次小于阈值,重复之前的控制流程。由于调节过程太缓慢,系统在200 s 时才接近稳定状态。性能指标函数为易知控制效果较差。未加入扰动时,开度分解控制系统的调节能力与前2 种系统相差不大,但其抗干扰能力较差,加入扰动信号后需求流量值变化缓慢,给水小阀进行调节,小阀精度上的优势未能弥补控制过程的缓慢,因此整体控制效果较差。

图8 大小调节阀分程控制仿真结果图Fig.8 The simulation result of split-range control based on feed valve switching
4 结 语
基于直流蒸汽发生器蒸汽过热度模型,本文提出蒸汽过热度的单变量控制系统架构。针对船用动力装置直流蒸汽发生器“大-小”给水调节阀配置特点,提出基于分程控制的蒸汽过热度切换控制方法。仿真结果表明,该控制方法在保证稳定性的同时,小流量补水时开小阀进行精确跟踪设定值,流量较大时用大阀进行快速调节,保证了给水的快速性和准确性,满足船用动力装置要求[8]。
