一种基于图像处理的舰载无人机识别定位方法设计
2023-09-16张佰顺马晓静
张佰顺,张 娜,马晓静
(1.海军潜艇学院,山东 青岛 266199;2.山东大学,山东 青岛 266237)
0 引 言
无人机具有生存能力强、机动性能好、飞行环境要求低等优点,广泛应用于空中侦察、战场监视、远程打击等场合,在现代海军装备中,舰载无人机能够有效避免不必要的人员伤亡[1]。无论民用领域还是军工领域应用均具有广阔前景,随之出现自动起落以及自动执行任务无人机,为了配合无人机自动起落,需要系统配备可供无人机起落的地面站,无人机识别定位技术成了无人机自动精准降落技术的重点所在[2-3]。
本文基于图像处理方法,采用“地对空”的方式捕捉无人机位置,并对无人机进行引导,实现无人机识别定位。其工作流程大致为:地面站摄像头首先采集地面站处背景图片,并对该图片进行相应的处理,待后续提取无人机使用;待无人机进入视野,受到引导请求之后,拍摄无人机图片并进行相应处理,与之前背景差图片作差以提取无人机;将背景差图像应用最大类间方差法进行二值化处理;对该二值化图像进行霍夫变换,将符合条件的点通过霍夫直线变换变换到霍夫空间,对霍夫空间的点进行统计,得到图像空间直线的极坐标表示;对符合条件的极坐标点按正交关系进行分类,剔除无用的点,并进行坐标反变换将极坐标变换成图像空间的直线,通过计算2 条直线相交点来确定无人机在图像中的坐标。该方法将摄像头置于地面站中心,拍摄无人机照片,并识别无人机在图像中的位置,进一步计算无人机相对于地面站的方位与距离,从而达到无人机精准降落的目的。
本文首先介绍背景差原理,并应用此原理将无人机与背景图像分离,然后介绍最大类间方差法及其原理,从原理入手将背景差图像处理成可用于霍夫变换二值化图像。从二值化图像出发,对霍夫直线变换进行详细分析,并将其应用到上述二值化图像,得到检测出无人机中心位置的算法,为无人机的精准降落提供技术基础。
1 无人机图像提取处理
从图像识别入手,将摄像头放置在舰船甲板地面站,通过拍摄无人机方式定位,并以无线通讯方式发送其位置到无人机,作为无人机调节位置的反馈,以达到无人机精准降落目标。背景差法是目前针对运动物体检测的常用方法之一,将2 幅图片抽象为像素矩阵,矩阵元素相减,得到2 个矩阵差分矩阵,即是2 幅图片进入背景图中物体图片。当被检测目标进入背景时,采集到的图像与背景之间便在物体周围产生差值,通过两者作差即可提取出该物体,实现物体与背景分离的目的[4]。
1.1 背景分离预处理
背景差法是对像素作差,要求像素点表征该像素颜色深度信息。由于拍摄到的图片为RGB 三通道BMP 格式图像,因此对图片进行背景作差之前需要将其转化为单通道灰度图[5]。
对于RGB 空间数据,可以通过相应公式将其归一化到灰度空间,常用的灰度值计算公式有:
其中:R为红色数据,G为绿色数据,B为蓝色数据。式(1)为简化的sRGB IEC61966-2.1 [γ =2.20]公式,式(2)为Adobe RGB (1998) [γ=2.20]公式。对于本文系统,由于计算速度的需要,可以将式(2)简化为简单的乘法运算:
进一步,可以将式(3)简化为移位运算:
式中:R为红色数据;G为绿色数据;B代表蓝色数据。由式(4)将RGB 彩色图像处理成灰度图,如图1所示,转化而来的灰度图像会保留原图像色度信息,无人机与背景差异明显,为无人机与背景的分离打下良好基础。
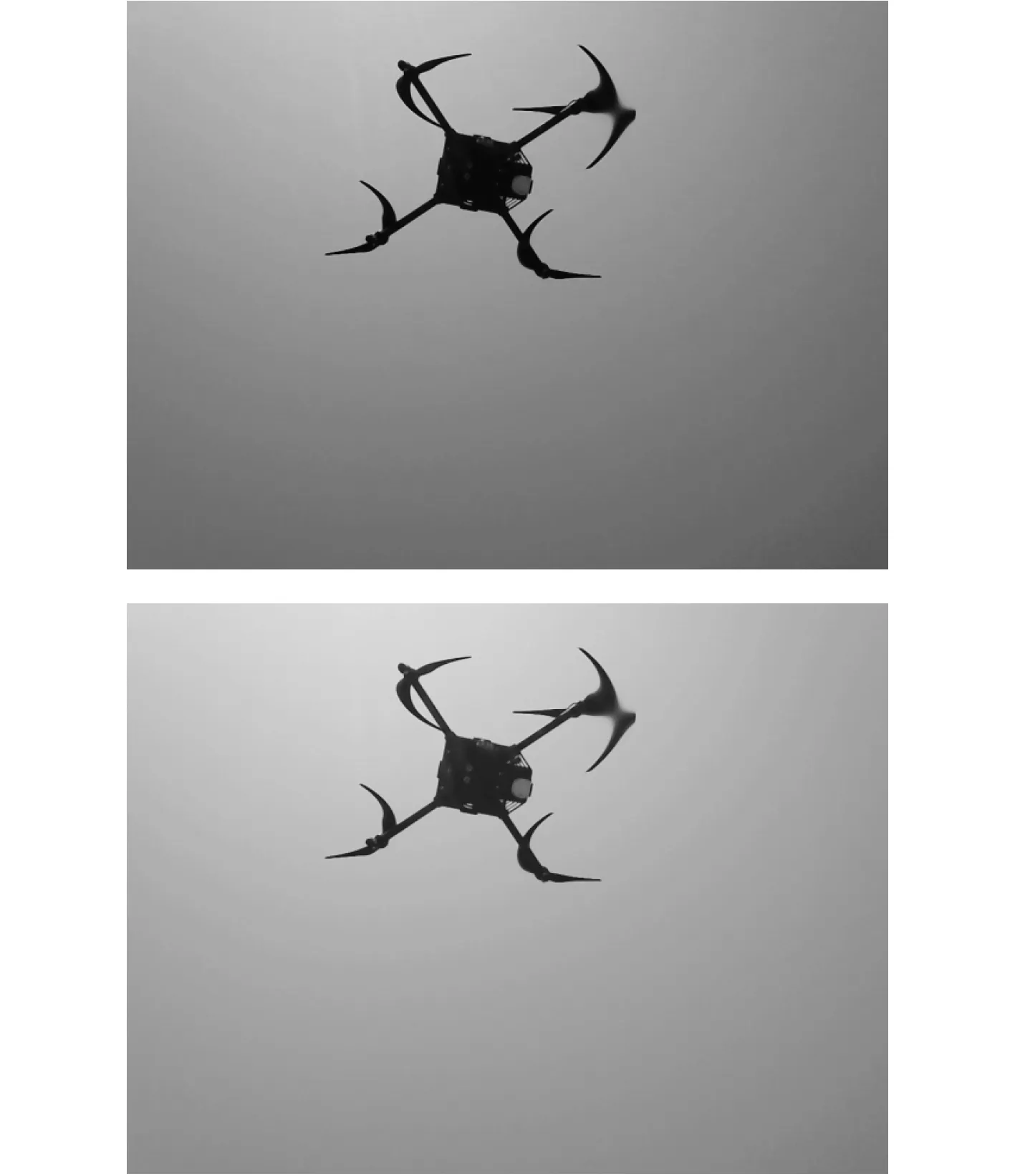
图1 彩色RGB 图像转化为灰度图Fig.1 Convert color RGB image to grayscale
1.2 背景差图像处理
图像阈值自动选取选择使用最大类间方差法。能够很好地保留图像的边缘信息,避免过度分割,分割效果理想。地面站在收到无人机返航请求时会先拍摄一张背景图片。当无人机降落时,地面站会在收到引导请求后拍摄一张无人机在当前视野中的图片,通过对当前图片与背景图片的差分,实现无人机与背景的分离[6]。
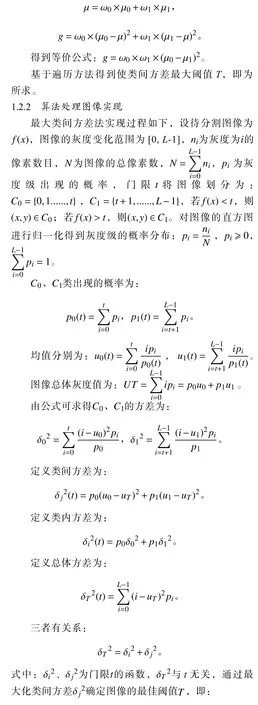
1.2.1 最大类间方差法算法原理
对于被检测目标图像I(x,y)前景和背景分割阈值记为T,属于前景像素点数占整幅图像比例记为 ω0,其平均灰度 µ0; 背景像素点数占整幅图像比例为 ω1,其平均灰度为 µ1。 图像的总平均灰度记为µ,类间方差记为g。
假设图像背景较暗,并且图像大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:
由此,即可得到计算一幅图像二值化阈值的算法实现。应用该算法处理得到的图片如图2 所示。白色为无人机,黑色为背景。可见,应用OTSU 算法可以正确地实现无人机与背景的分割。

图2 OTSU 算法处理图像Fig.2 OTSU algorithm to process images
2 无人机识别定位
2.1 霍夫直线变换算法原理
霍夫变换(Hough transform)在图像处理中进行特征提取,将图像空间点变换为霍夫空间,并对霍夫空间中点进行累加,累计结果局部最大值将得到一个符合特定形状的集合,霍夫变换目前可用于任意形状物体的识别[7]。
一条直线在笛卡尔坐标系中可由参数斜率和截距(m,b) 表示,在极坐标系下由参数极径和极角 (r,θ) 表示。已知直线在笛卡尔坐标系中的表达式为:
变换到其极坐标系表示:
化简可以得到:r=xcosθ+ysinθ。
对于直角坐标系中的点 (x0,y0) ,可以将通过这个点的一族直线统一定为:
在极坐标系下,每一对 (rθ,θ) 值代表直角坐标系下一条通过点 (x0,y0)的直线。
霍夫变换将图像空间中符合条件的点变换到极坐标系,将极坐标系离散化,通过追踪图像空间每个点对应曲线的交点,交点曲线数目超过阈值,代表参数对 (rθ,θ) 在图像空间中是一条直线。将极坐标 (rθ,θ)代入即可得出原图像中直线,进而将其绘制在原图像中。根据算法原理进行检测图像中直线,霍夫直线检测具体的实现流程如图3 所示。
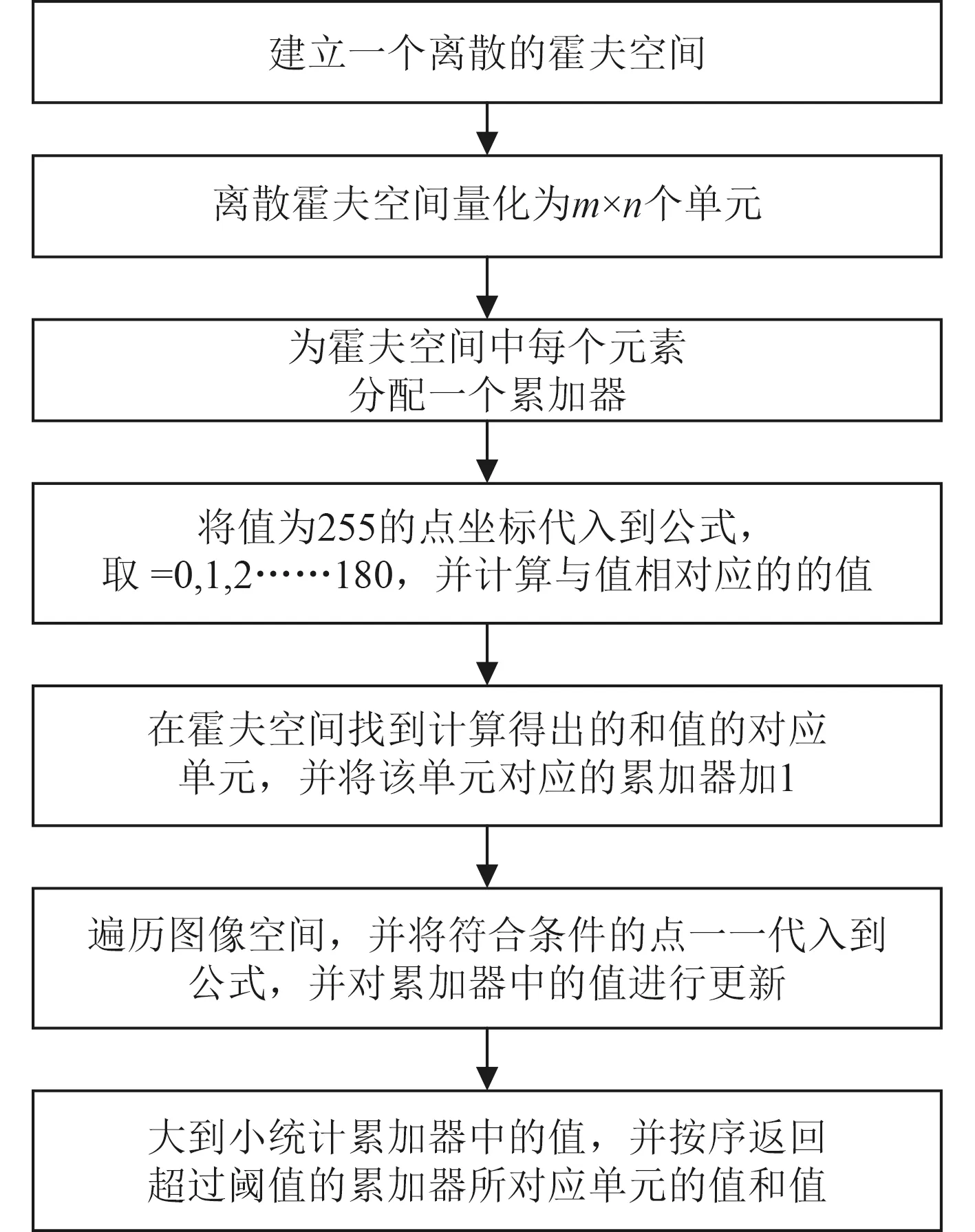
图3 霍夫直线变换算法实现流程Fig.3 Hough line transform algorithm implementation process
应用霍夫直线变换检测到的直线如图4 所示。
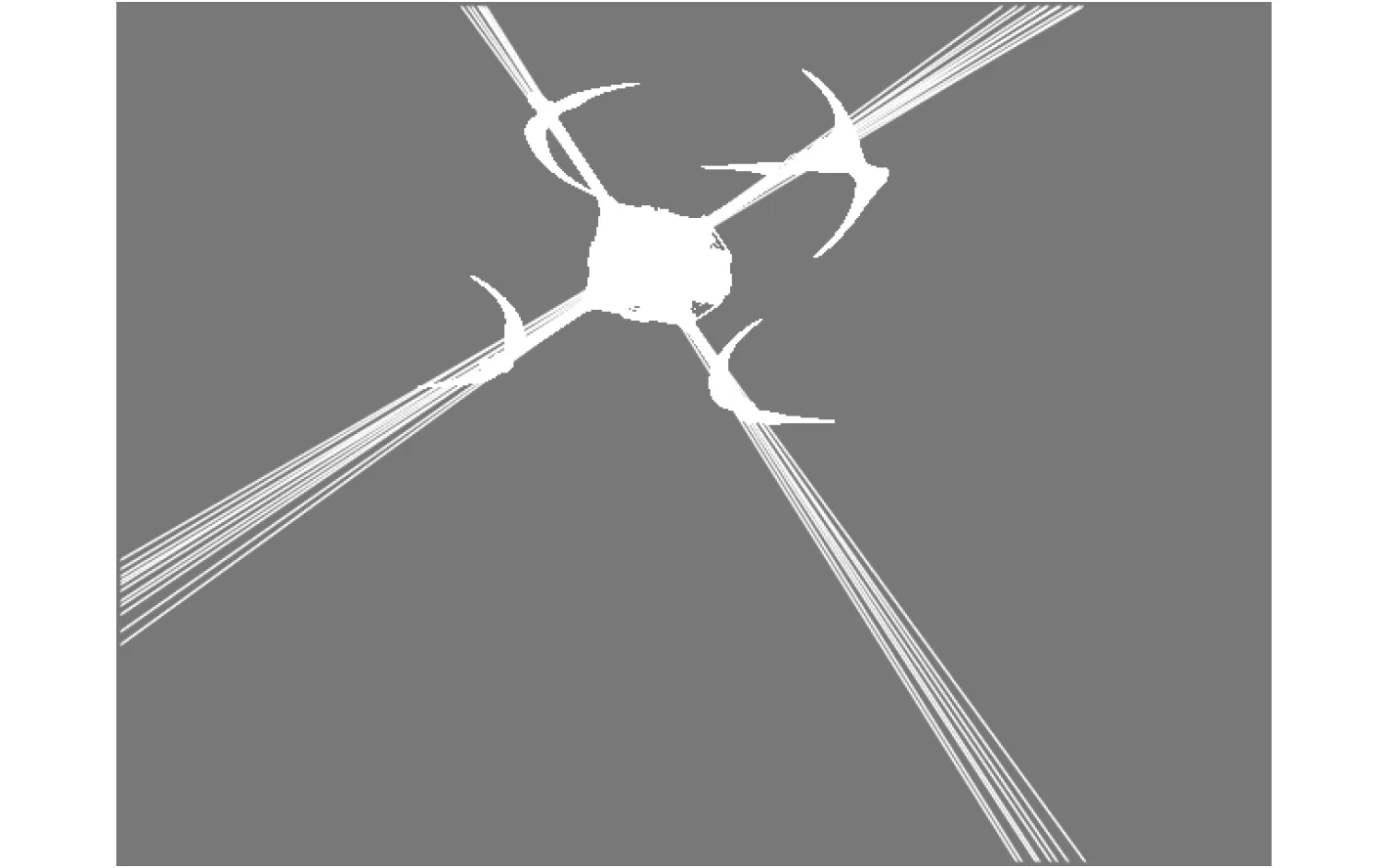
图4 霍夫转换检测到的直线Fig.4 Line detected by Hough transform
图4 为图中最长30 条直线所在位置,全部位于无人机旋翼臂附近,发散情况因旋翼大小及摇摆方向而有所差异,均在可接受范围内。
2.2 无人机位置确定
根据极坐标确定无人机位置,设定一个阈值,若落在该阈值里面的一族直线 θ 值与另一族直线 θ 值相差1/2 个霍夫空间宽度,则可认为这2 族直线正交。舍去阈值之外的 (r,θ)参数对,对阈值之内的2 族参数对(r,θ) 分 别 取 平 均,得 到2 对 参 数 (r1,θ1) 和 (r2,θ2),分别对应图像空间中一条直线。将该参数对代入便可以得到2 条直线的解析表达式,2 条直线的交点(x0,y0)即无人机中点坐标位置。应用该方法可有效检测无人机坐标,误差范围小,检测精确,可排除噪点干扰[7]。其效果如图5 所示,检测计算中心点与无人机实际中心点基本重合。

图5 霍夫变换得到的无人机中心点Fig.5 The center point of the drone obtained by the Hough transform
3 系统实验测试
本实验采用大疆M100 开发者套件作为目标无人机进行实验测试,其搭载的可扩展飞行平台,可实现外部设备接入,开发方便,稳定性高,为测试提供了稳定的检测目标。摄像头采用罗技C270 摄像头,罗技Fluid Crystal 技术算法可以自动调节帧率、颜色和清晰度等,从而使得拍摄的画面更加清晰。此外,Right-Light 技术可以自动适应光线,使其可以适应户外多变的天气条件,为图像可靠采集提供便利。
本文针对该方法做了不同情况下的实验,测试了其在不同干扰下识别无人机的可靠性。经实验,本文方法可行有效,识别无人机准确可靠,可有效排除杂物干扰,且对天气有一定的适应性。
由图6 可知,图像中云的分布不均匀,且有大块灰色区域,然而背景差方法依然能够准确地提取无人机,且能准确识别。说明该方法对天气情况有一定的适应性,可以保证复杂天气情况下任务的顺利执行。
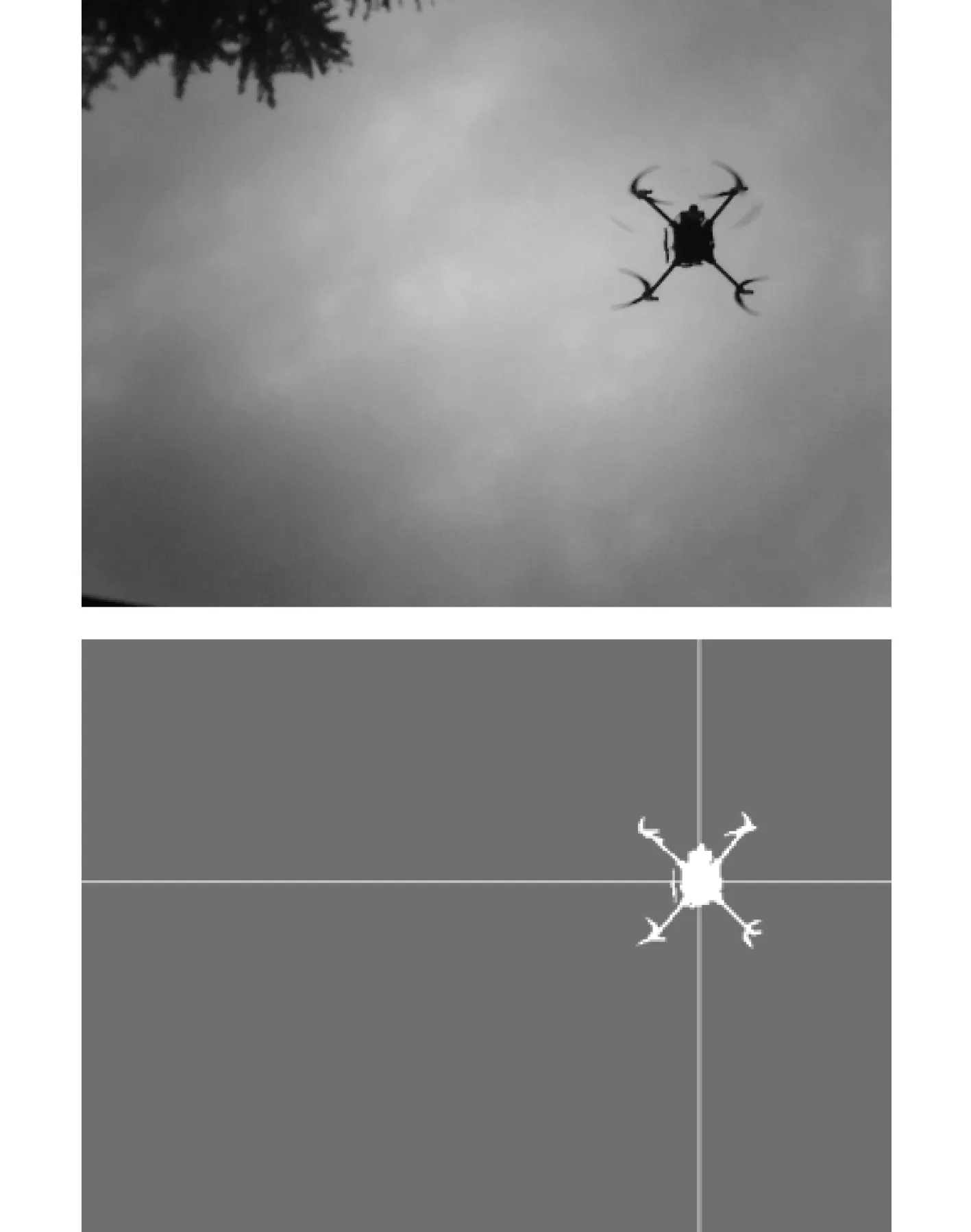
图6 多云干扰情况下识别无人机Fig.6 Identifying UAVs in cloudy interference
由图7 可知,存在杂物、噪点干扰情况下,图像中存在若干大小不一的噪点以及与无人机大小相似的杂物,虽然背景差无法去除该噪点和杂物,但是霍夫直线变换依然不受其影响,有效、准确地识别出了无人机中心位置。说明该方法对噪点及杂物干扰有较强的适应性,可有效排除噪点干扰,可在大风、脏乱的地方执行无人机降落任务,且准确识别无人机。
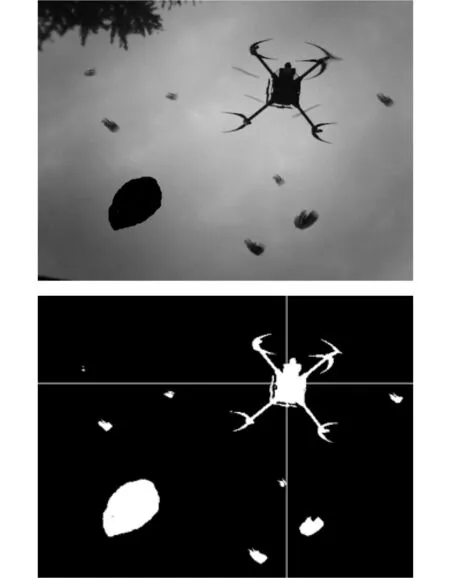
图7 噪点干扰情况下识别无人机Fig.7 Identifying drones in the presence of noise interference
由图8 可知,在无人机残缺情况下,该方法依然可以准确识别无人机中心点方位。说明该方法可以在无人机刚进入视野中时便可以锁定无人机,并对无人机进行实时锁定,保证无人机降落准确。
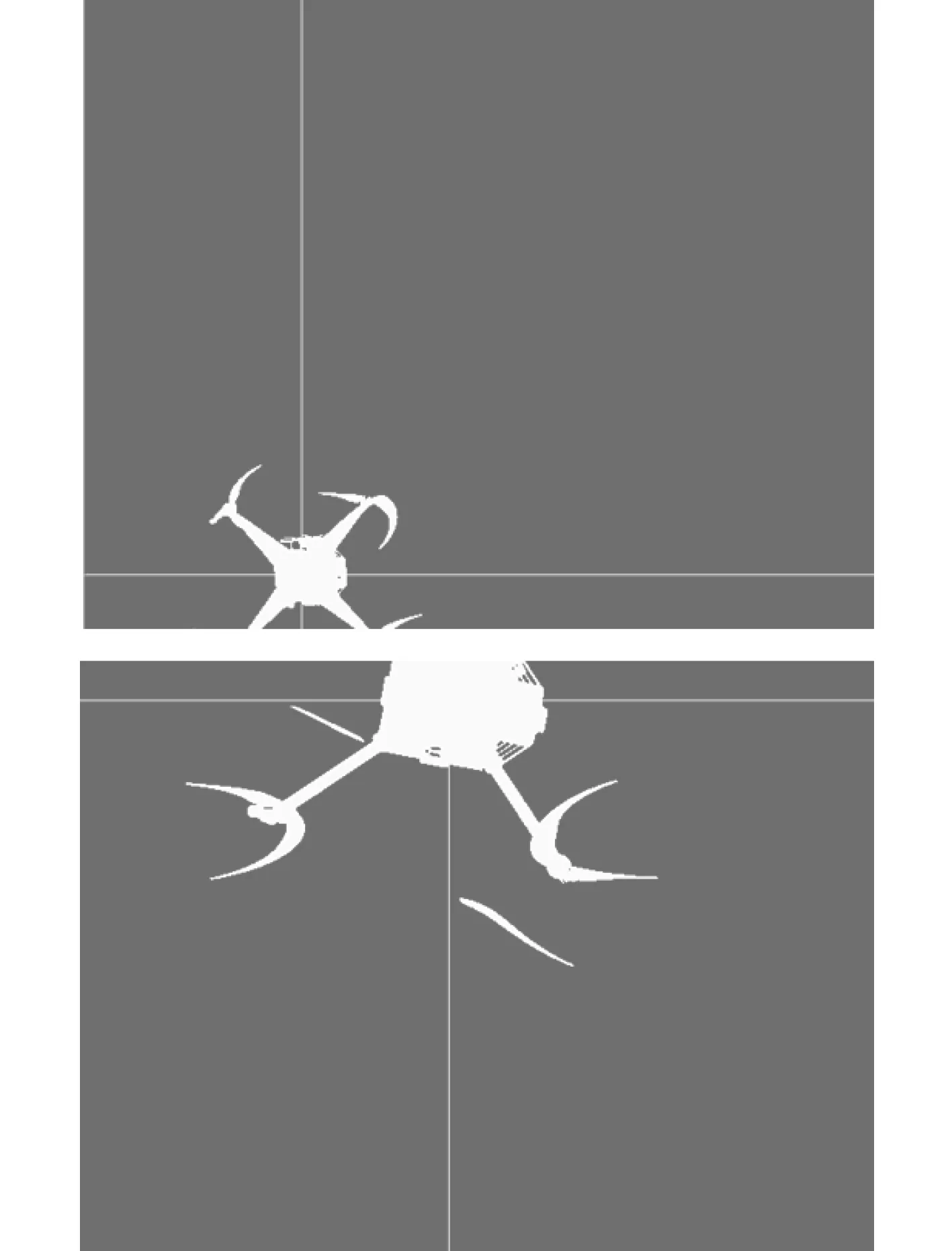
图8 识别残缺无人机Fig.8 Identifying Mutilated Drones
4 结 语
针对舰载无人机精准降落技术—无人机识别定位问题进行研究,提出基于图像处理的地面站摄像头定位法,采用摄像头拍摄无人机并识别的方法定位无人机,然后通过无人机相对于图像中点的方法进行位置调节,达到无人机精准降落的目的。在设计和工作中仍有诸多不足和待研究、改进之处,由于使用了静态背景图像,在极端恶劣天气下可能因为天气变化太大、乌云运动等因素妨碍无人机与背景的分离,导致不能有效识别无人机,从而无法对无人机进行有效引导。需要在后续工作中引入动态背景算法,以提高该方法的适应性,提高无人机精准降落的可靠性。
