基于多媒体网络的舰船图像定位自动匹配系统设计
2023-09-16吴正英
吴正英
(厦门海洋职业技术学院,福建 厦门 361102)
0 引 言
为了对航行安全性提供保障,需要对船舶进行实时定位、跟踪,以便实时掌握船舶航行状态,同时,在海上发生航行事故时,相关部门能够在第一时间收到相关事故信息并及时进行相应处理。
目前,船舶定位主要依靠卫星定位系统,比如美国的GPS(Global Positioning System),中国“北斗”系统,结合电子海图显示与信息系统(Electronic Chart Display and Information System)和船舶自动识别系统(Automatic Identification System)对船舶进行定位、追踪。
国内外对船舶定位都进行了较多研究,李阳[1]设计了基于北斗三号的船舶定位系统,定位精度可达4 m 以内;范晓锋等[2]对基于智能自组网的船舶定位以及身份识别进行研究;陈宇[3]研究了物联网结构优化下的多源定位方法。本文基于多媒体网络技术,提出一种通过图像自动匹配定位的系统,能够实时、快速地处理信息,对船舶的安全航行提供了可靠的保障。
1 多媒体网络技术
1.1 多媒体网络的组成
多媒体采用的是数字信号,可以综合处理图片、视频等多种信息,数据形式比较丰富;多媒体提供了易操作并十分友好的界面,更加直观、便利地实现人机交互;同时,多媒体可以很方便地与各种外部设备实现连接,可以实现数据交换、监视控制等各种功能。由于具备这些显著优点,多媒体网络技术已经广泛地应用于生产、教学等多个领域。多媒体网络的主要构成和工作原理如图1 所示。
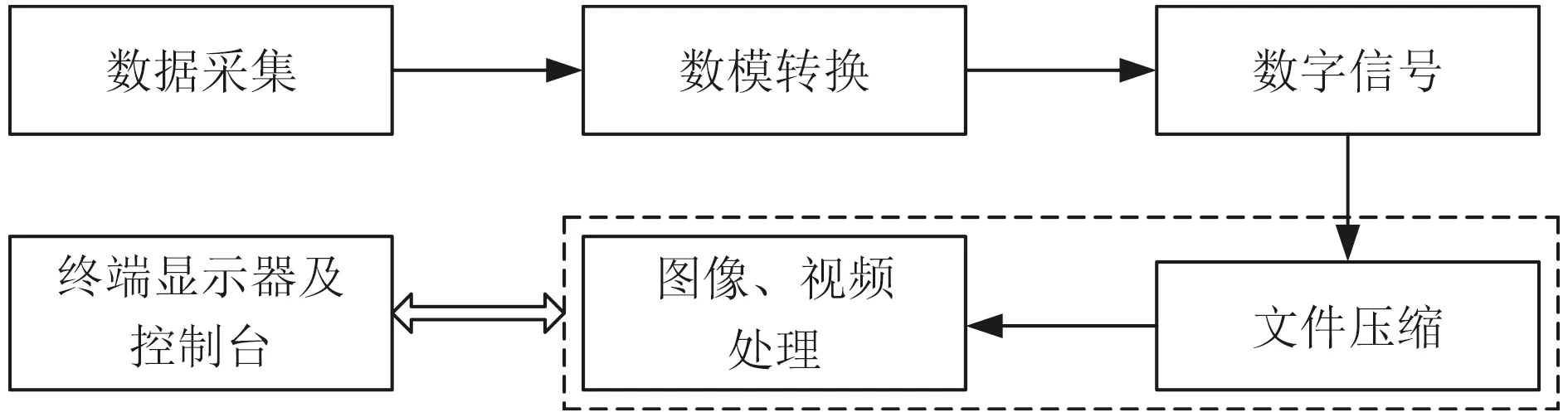
图1 多媒体网络组成及工作原理示意图Fig.1 Multimedia network composition and working principle schematic diagram
数据采集模块完成对所需图像、文字等各种信息的采集,经过数模转换得到大量的数字信号,经过压缩处理,去除冗余信息,再对图像、视频进行增强等处理,传输至终端显示器及控制台,控制台也会根据用户需求对所需信息进行设定、筛选,再将指令发送给信息处理模块(图1 中虚线部分)。终端显示器可以是多个用户,每个用户都可以对所生成的信息进行挑选。
1.2 多媒体网络中的关键技术
1.2.1 文件压缩
文件压缩是指处理掉数据中的冗余部分,而保留确定需要或有关的信息,去掉不需要或无关的信息,这里的冗余主要包括空间冗余、时间冗余、结构冗余、视觉冗余等。
文件压缩编码的方法按原始数据是否有损失可分为有失真编码和无失真编码,按编码原理分为预测编码、变化编码、统计编码等。
预测编码是根据已经编码重建后的像素值预测待编码的像素值,对原始值和预测值的差值进行编码,预测编码可以分为差分脉冲编码调制(Differential Pulse Code Modulation,DPCM)和自适应差分脉冲编码调制(Adaptive Pulse Code Modulation,ADPCM),其原理图如图2 所示。

图2 预测编码工作原理Fig.2 Working principle of predictive coding
变换编码在编码时,原始数据要从初始空间或时间域经过变化后变为一个更适于压缩的抽象域,目前最常用的是离散余弦变换。
统计编码中常用的是霍夫曼编码,原理是统计不同信息出现的频率,对于出现次数多的信息,可以使用长度较短的编码,而对次数少的信息,则用较长的编码,这样可以提高编码效率,提高编码的有效性。
1.2.2 图像处理及图像分割
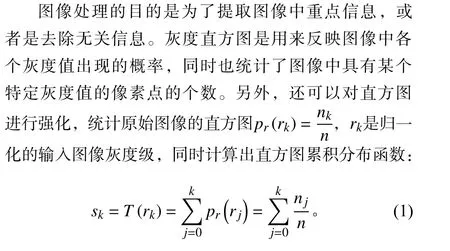
中值滤波是一种对图形进行非线性处理的平滑方法,方法是先确定一个含有奇数点的窗口W,在图像上移动这个窗口,把这个窗口W所包含的像素点的灰度值按一定顺序排列,则该点的灰度值可以用位于中间的灰度值代替。
图像锐化可以加重目标轮廓,使图像变得更清晰,单方向的一阶锐化是对某个特定方向上的边缘信息进行增强,以水平方向的一阶锐化为例,如图3 所示。
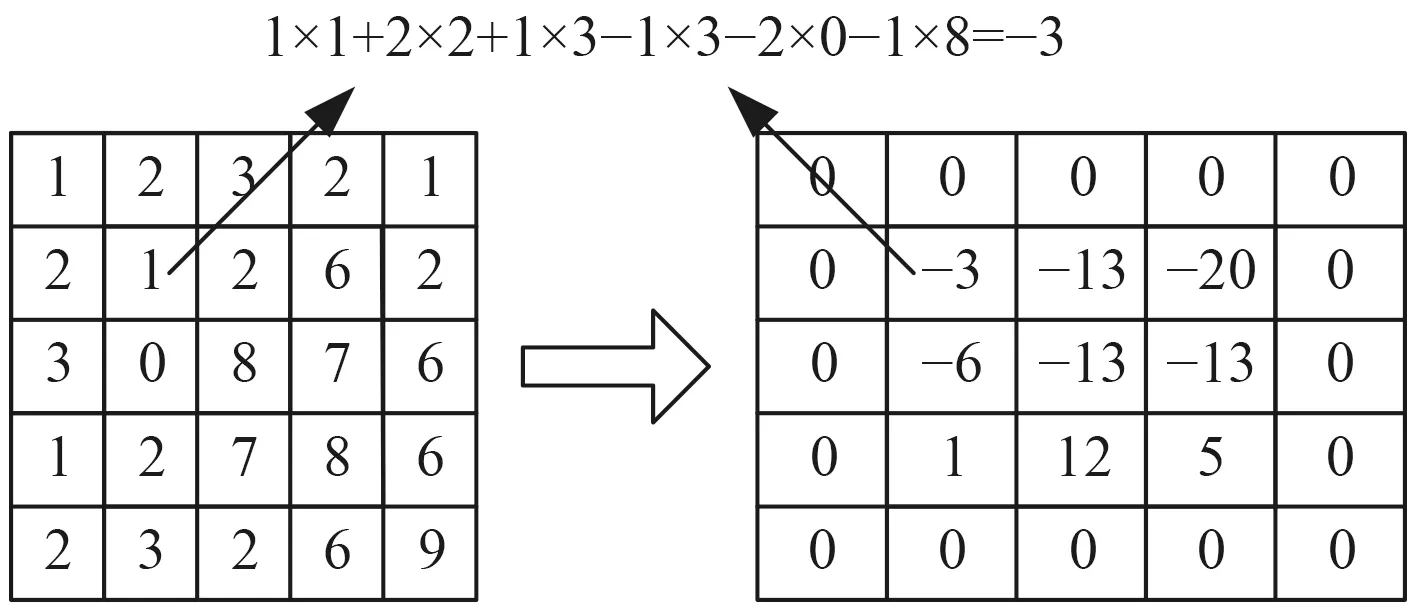
图3 水平方向的一阶锐化Fig.3 First-order sharpening in the horizontal direction
图像分割是图像识别和图像理解的基础,也是本文实现自动匹配的基础,是基于目标或区域的特征进行的,把图像分割成互不交叠的有意义区域,便于进一步分析,分开的区域一般是图像中用户感兴趣的部分,流程如图4 所示。

图4 图像分割流程Fig.4 Process of image segmentation
图像分割是基于图像亮度值的不连续性和相似性2 个特征,常用的方法灰度阈值分割法、自适应阈值分割法、边缘检测和区域生长法。
假设图像为f(x,y),其灰度值范围是[0,L],在0 和L之间选择一个合适的灰度阈值T,灰度阈值分割法则表示为:
在有突发噪声或背景灰度变化较大时可以用自适应阈值分割法,这个算法的缺点比较复杂,但其抗噪声能力较强。在实际应用时,需要根据具体情况选择合适的方法和阈值。
图像的边缘检测是利用各种算子以及高通滤波处理方法对图像边缘进行增强。一阶算子主要有Roberts算子、Prewitt 算子和Sobel 算子,相对来说,Sobel 算子的检测效果最好。
区域生长的原理是把具有相似性质的像素点集合成一个区域,把其中某一个种子像素作为生长的起点,将种子像素附近范围内与这个种子相似的像素合并到其所在的区域中,再将这个区域作为新的种子像素重复上述过程,直到没有符合条件的像素出现。
1.2.3 时延抖动消除及数据恢复
信息在离开发送端时,是按照一定的间隔均匀传输的,但在通过网络时,间隔会因不同原因而改变,从而产生时延抖动,在接收端间隔就会发生变化,如图5(a)所示。主要原因是网络路由状态频繁变化,网络节点流量拥堵,信息在各个节点缓存时间过长。
图5 时延抖动及消除Fig.5 Delay jitter and elimination
为了消除时延抖动,在接收端增加一个缓存,当缓存中储存了一定数量的分组后,以固定速度按照顺序读出分组并进行还原。缓存其实是一个遵循先进先出规则的栈,图5(b)中的T表示播放延时。
在上述的信息传输过程中,可能会发生分组丢失,数据的丢失直接影响到接收端的多媒体文件,虽然(Transmission Control Protocol,TCP)可以有效解决分组问题,但同时会带来更大的时延抖动。因此,在多媒体数据传输过程中常使用前向纠错或数据恢复等技术来重获丢失的分组,或采用交织技术来减少丢失分组对多媒体质量的影响[4]。
2 舰船图像定位自动匹配系统
2.1 定位系统组成和工作原理
本文基于多媒体网络技术,构建了舰船图像定位自动匹配系统,如图6 所示。

图6 基于多媒体网络技术的舰船图像定位系统Fig.6 Ship image positioning system based on multimedia network technology
摄像机实时获取静态、动态信息传输至多媒体网络模块,多媒体网络模块根据前文描述的原理对数据进行处理,用户可以根据终端显示器和控制系统接收到的处理后的多媒体数据进行查询访问,并可以根据需求对数据进行筛选,同时,有关部门也可以对航行中的舰船进行必要的实时监控[5-6]。
摄像机获取的信息融合其他来源的信息,如卫星定位数据、AIS 数据等,通过自动匹配算法对船舶进行定位,定位的信息也会实时传输至终端显示器和控制系统。整个系统需要对大量的多媒体数据进行实时处理、传输,以保证舰船的安全航行。
2.2 舰船运动方程
本文建立的运动方程的坐标系是以舰船重心为原点,并且固定在Eξη平面上,假设舰船的运动速度为US,船 角 速 度 为 ΩS, χ 为 潜 浮 角, γ 为 航 迹 角, α、β为水动角。舰船质量为m,受到的合力F在坐标系上的分量为Fξ、Fη,受到的转矩在坐标系上的分量为TξG,转动惯量为JZG,则有:

2.3 图像匹配
采用尺度不变特征变换算法(Scale-invariant Feature Transform,SIFT)对图像进行匹配,SIFT 具有良好的稳定性和不变形、区分性好、高速性以及可扩展性。SIFT 算法实现特征匹配可以分为提取关键点、定位关键点并确定特征方向、通过各关键点的特征向量三步来完成。
L(x,y,σ) 定义为原始图像I(x,y)与一个可变尺度的二位高斯函数G(x,y,σ)的卷积运算为:
式中: (x,y) 为图像的像素位置, σ为尺度空间因子。
2.4 实验结果
基于多媒体网络技术的舰船图像定位自动匹配系统,对自动匹配的时间和成功率进行实验研究,实验结果如图7 所示。

图7 自动匹配时间和成功率实验结果Fig.7 Automatically match time and success rate experiment results
可以看出,基于多媒体网络技术的舰船图像定位自动匹配系统能够实现舰船图像定位的自动匹配,匹配平均时间为5.23 ms,匹配的成功率可以达到90%。
3 结 语
基于多媒体网络技术的舰船图像定位自动匹配系统,能够实时处理、传输大量的多媒体数据,通过SIFT 图像匹配算法,可以实现舰船图像定位的自动匹配,实验证明,系统性能良好,为舰船的安全航行提供了可靠的保障。在后续研究中,可以对图像匹配算法进行优化,进一步提高系统性能。
