一种面向养殖工船舱壁清洗水下机器人
2023-09-15王云杰林礼群马凤爽徐志强高迪驹
王云杰,林礼群,马凤爽,徐志强,高迪驹
应用研究
一种面向养殖工船舱壁清洗水下机器人
王云杰1,2,林礼群1,2,马凤爽1,2,徐志强1,2,高迪驹3
(1. 中国水产科学研究院渔业机械仪器研究所,上海 200092;2. 农业农村部远洋渔船与装备重点实验室,上海 200092;3. 上海海事大学,上海 201306)
养殖工船舱壁清洗水下机器人是养殖作业的重要关键设备之一。针对深远海养殖工船的实际需求,研究了一种养殖舱壁清洗水下机器人。分析了水下机器人的舱壁静力学原理和舱壁运动动力学原理,建立了运动坐标系,并提出了一种基于模型预测控制的路径跟踪策略。最后,分别通过对水下机器人自由控制和跟踪控制实验验证了的控制策略。实验结果表面,该方法能够获得良好的控制效果。该水下机器人的研究方法可为养殖工船清洗作业提供一种有效的解决方案。
养殖工船 舱壁清洗 水下机器人 模型预测控制
0 引言
由于我国深远海平台养殖起步较晚,系统性养殖工艺与支撑设备的关键环节、关键技术仍然存在不少问题[1,2]。其中,养殖工船舱壁面附着的海生物与养殖污物去除是工船养殖作业的重要环节之一。养殖舱环境因长时间受海水、剩余饵料及鱼类排泄物作用,容易繁衍滋生藻类、贝类等附着物,造成鱼类的生存环境恶化、寄生虫滋生,使养殖产品死亡率增加,因此需采用舱壁清洁系统定期清洁舱壁,保证良好的舱养环境。
尽管使用水下机器人用于清洁养殖舱壁,但目前这类机器人存在以下亟待解决难题:一是现有市场上比较成熟的水下清洗设备主要是针对深度10米以下的游泳池开发应用,满足不了大深度、耐海水腐蚀及坚硬附着海生物的清洗去除要求[3]。二是针对船体表面清洗类的设备主要是水上作业,或水下半自动化作业。由于船体表面附着物坚硬、厚度大,所以大多采用高压水喷射装置清洗,容易去除表面防锈材料,清洗设备成本高,且与养殖舱壁面水下清洗条件不相适应[4,5]。三是现有水下清洗自动化设备都采用推进器形式吸附表面,推进器产生的水流扰动对养殖鱼群影响很大[6]。
为此,根据深远海养殖工船的实际需求,研究一种养殖舱壁清洗水下机器人。首先,提出该水下机器人的设计方案,并对其进行力学分析。接着,研究水下机器人的控制系统,提出一种基于模型预测的控制策略。最后,通过仿真实验验证该控制策略的有效性。
1 水下机器人设计
1.1 需求分析
深远海养殖工船场景中,以某海洋养殖工船中较有代表性的舱体为例,如图1所示。单个舱体的尺寸约为22.5 m×19.5 m×14.5 m,该舱体待清洗表面积约1600 m²,其中,边切角约为135°。舱体材质为钢材材质,规格为12 mm厚钢板。

图1 某海洋养殖工船舱体示意图
因此,对水下机器人的具体功能需求包括:能稳定吸附在垂直舱壁和底部舱壁5个壁面;清洁过程不伤害舱体壁面油漆;按规划路径自动清洗各壁面,实现较好的清洁效果;有故障报警功能,且紧急情况下自动断电保护;可在岸基设备观测机器人状态。
1.2 水下机器人设计方案
根据上述需求,设计一种养殖舱壁清洗水下机器人,如图2所示,以解决深远海养殖工船舱壁清洗问题。该养殖舱壁清洗水下机器人由机器人主体模块、清洗模块、视觉感知模块和运动控制模块四大部分组成。
机器人主体模块主要由机器人箱体(尺寸约为1米×1米)、支撑轮组成。在机器人箱体一端的左右两侧各安装一个主动支撑轮,在其另一端的中间位置处安装一个从动支撑轮,由三个轮支撑机器人的平衡。主动支撑轮具有驱动功能,而从动支撑轮仅做平衡支撑作用。此外,这三个支撑轮还有具有磁力吸附作用,使得机器人能够在舱体壁的任何地方行走。水下机器人主体依靠两组主动支撑轮进行驱动,同时,利用速度差实现转向。
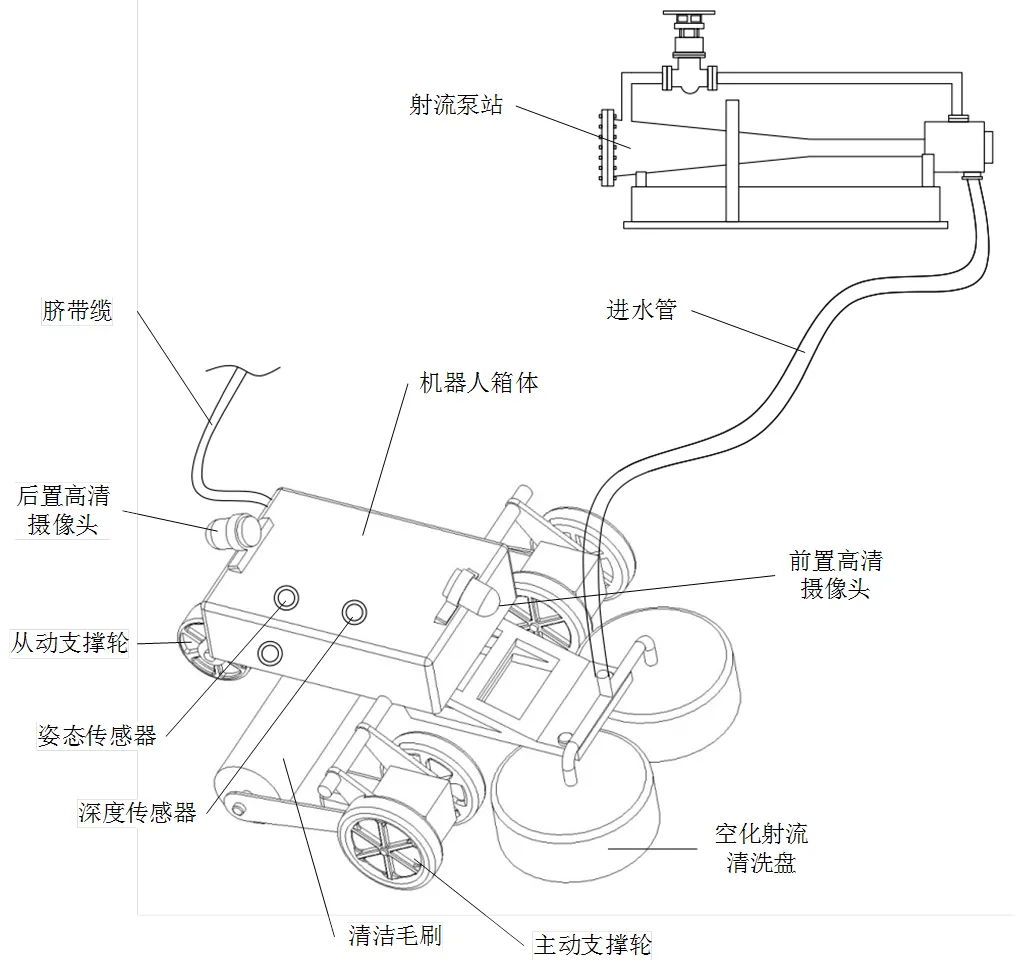
图2 养殖舱壁清洗水下机器人示意图
清洗模块由空化射流清洗盘、清洁毛刷组成。在主动磁力吸附轮的一侧安装空化射流清洗盘,基于高压水空化射流技术对舱壁进行清洗,其中,空化射流清洗盘通过进水管与射流泵站相连,射流泵站通过控制信号与工控机相连接。在清洗盘清洗后,再通过清洁毛刷的实现二次清洗。
视觉感知模块主要由安装在机器人箱体前后端的两个高清摄像头和顶部姿态传感器、深度传感器组成。利用两个高清摄像头采集大量清洗前后的图像数据,使用图像识别和机器学习算法训练清洗前后清洁度特征,构建清洁度识别模型,用以判断清洁区域是否达到清洁要求,将识别结果输入给机器人运动控制逻辑,实现机器人自动清洁功能。利用机器人安装的脐带缆在运动过程中的长度变化,绞盘主被动收放缆触发信号,同时,融合深度传感器和姿态传感器可实现机器人的定位控制。
运动控制模块由嵌入式控制器、信号采集模块、图像处理模块和电源模块组成。利用控制算法实现水下机器人的运动控制。
1.3 机器人整体力学分析
1.3.1 舱壁静力学分析
水下机器人利用磁力吸附技术将机器人橡胶轮子吸附在舱壁上,其受力情况如图3所示。
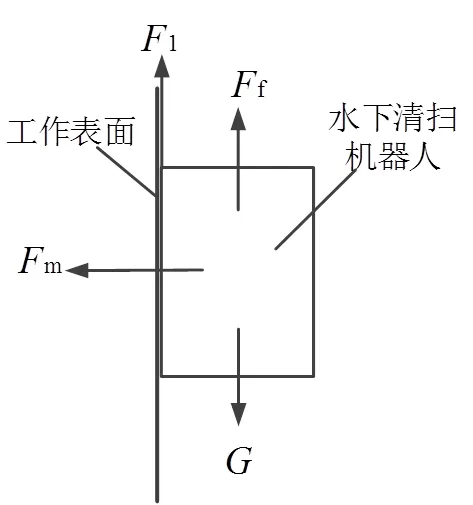
图3 水下机器人受力分析
如要使得水中的机器人能够静止吸附在舱壁上,应满足如下条件:


1.3.2 舱壁静力学分析
为了实现舱壁清洁工作,水下机器人不仅需要稳固地吸附在工作表面,而且还需要在稳固吸附的基础之上能够正常地向各个方向运动。为此,在满足静止吸附条件之外还应该满足相应的驱动条件:
其中:为驱动电机输出的驱动力。
结合爬壁机器人壁面运动动力学原理[8],机器人在舱壁运动的动力学方程可表示为:

其中,为机器人轮子的轴速度;为轮子质量;驱动力矩;为转动惯性矩。
2 控制系统
2.1 机器人运动学模型[9]
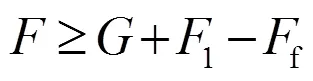
为了研究水下机器人的运动特性,首先建立描述水下机器人运动的坐标系系统,包括惯性坐标系与载体坐标系。惯性坐标E-x0y0z0,原点E取水域中一固定点为原点;载体坐标系o−xyz,以水下机器人重心o为原点,并随水下机器人一起运动,如图4 所示。
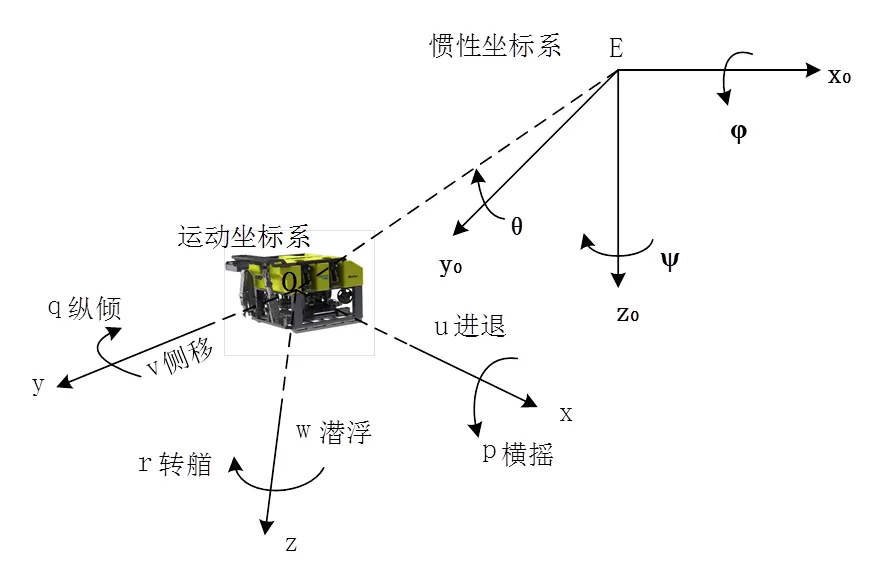
图4 水下机器人运动坐标系
考虑到计算的方便性,在分析水下机器人运动时引入载体坐标系。载体坐标系是以水下机器人的刚体为基准建立的坐标系。由于转动惯量和惯性积是与水下机器人的形状、密度分布以及质量有关的物理量,因此在该坐标系中,水下机器人的转动惯量和惯性积都是常数,同时受到的推力大小和方向也不会随着水下机器人运动的变化而改变。水下机器人在惯性坐标系中的位姿分别可以用位置坐标(0,0,0)和姿态角()来表示,分别为横摇角、纵倾角和艏向角;水下机器人在载体坐标系中的线速度和角速度分别为()和() 。水下机器人在六自由度下的运动学转换方程为[10]:

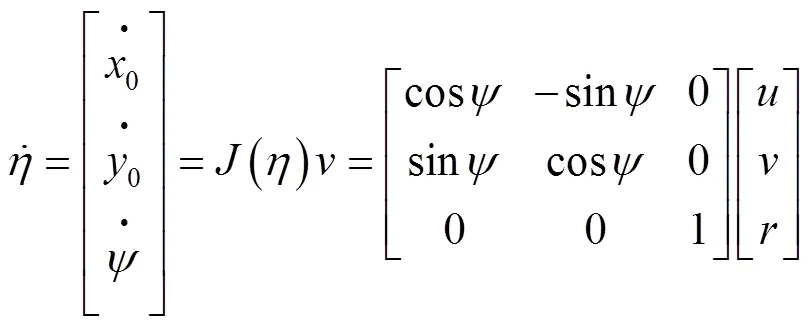
由于水下机器人贴壁工作,不必考虑全部6个自由度的运动,只考虑进退()、横移()和转艏()三自由度。对应的运动学方程可以进行简化。这里对水下机器人进行路径跟踪进行研究,因此,惯性坐标系下水下机器人的位置及角度量变量和载体坐标系下水下机器人的线速度与角速度变量之间的关系可表示为:
且当时间趋向于无穷时,水下机器人的位姿误差趋于零。即有:
2.2 基于模型预测的跟踪控制策略
模型预测控制(Model Predictive Control,MPC)是一种先进的过程控制,它使用一组约束来调节过程,并预测系统未来的行为。在实际的水下动态目标跟踪过程中,由于水下机器人动力系统对于控制量跳变要求比较严格,因此本文将控制增量作为目标函数的状态量,所构建的优化目标函数为:

其中,N为预测时域,N为控制时域。式(10)中,第一项反映了水下机器人对于动态目标的跟踪能力;第二项反映了对控制量平稳变化的要求,和是权重矩阵。基于MPC水下机器人轨迹跟踪策略原理框图如图5所示。
图5 基于MPC水下机器人轨迹跟踪策略原理框图
3 实验与分析
为了进一步研究面向养殖工船舱壁清洗水下机器人的功能,分别采用自由控制和跟踪控制的两种方式进行验证。
1)自由控制
自由控制是一种开环控制,仅仅简单地响应输入信号。控制水下机器人在养殖工船舱底移动,从A点出发,仿真速度控制在0.5 m/s,产生仿真结果如图6所示,该仿真结果显示了水下机器人在没有设定方向情况下的非线性运动,也表明了水下机器人可以实现自由移动。
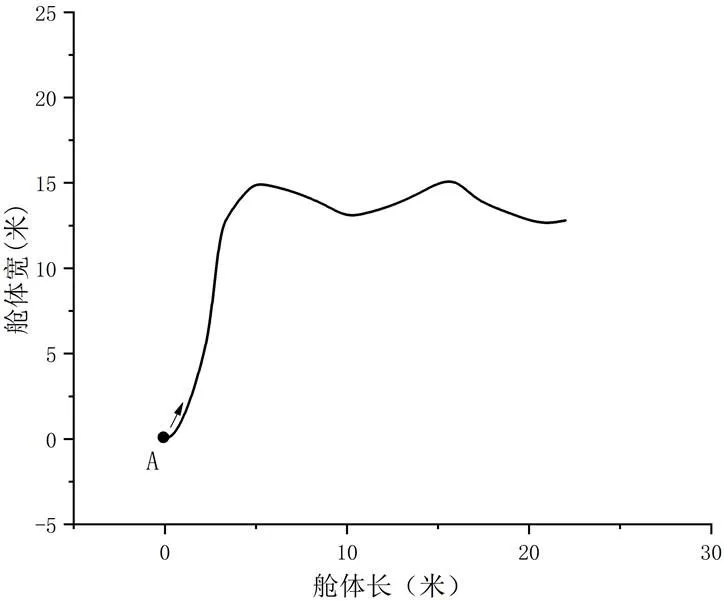
图6 开环控制时水下机器人运动轨迹
2)基于MPC的轨迹跟踪控制
本研究利用Matlab/Simulink搭建了基于MPC的跟踪控制仿真系统,基于MPC的轨迹跟踪控制是一种闭环控制。其中,采样时间为0.1 s,控制时域和预测时域均设置为10个时间步长。优化器根据MPC控制器对未来计划输出的预测,找到驱动预测计划输出尽可能接近设定点的理想控制输入序列。另外,根据文献[11]加入了基于PID的轨迹跟踪方法进行对比。两种跟踪控制方法充分考虑了水下机器人的自身尺寸、惯性,同时忽略水流、水温等环境因素的影响。实验结果如图7所示。

图7 基于MPC的水下机器人运动轨迹
在图7中,灰色虚线是围绕养殖工船舱壁的一条设定轨迹,目标是期望水下机器人沿着该目标轨迹运动。仿真实验从A点开始,根据实验数据获得水下机器人的行动轨迹(红实线是基于MPC跟踪控制的结果,点划线是基于PID跟踪控制的结果)。从图7中,可以看出在两种控制方法基本上都能够实现在矩形的舱体内根据设定轨迹进行跟踪控制。但基于MPC跟踪最大偏移量是1.65 m,基于PID跟踪最大偏移量是1.79 m,相比之下,前者控制效果相对较好。此外,基于MPC跟踪轨迹的平滑性较基于PID差一些,这说明MPC的滚动优化在起一定作用,使系统进行频繁调节。
4 结语
1)本文研究了一种养殖工船舱壁清洗的水下机器人,根据实际需求提出了水下机器人设计方案。分析了水下机器人的舱壁静力学原理和舱壁运动动力学原理,并建立了运动坐标系。基于机器人动力学模型,提出了一种基于模型预测控制的路径跟踪方法。最后分别通过实验验证了机器人的控制策略。该水下机器人的研究方法可为养殖工船清洗工作提供一种有效的解决方案。
2)关键技术讨论
针对养殖工船舱壁清洗功能的水下机器人关键技术包括:持续供电和水下通信技术、定位与导航技术、清洁控制技术、机器人控制策略等。
(1)持续供电与水下通信技术:自主移动水下机器人应配备足够且可靠的电源,以保证水下机器人工作时间和清洗效率。同时,还需要具备可靠的水下通信系统,以便于与地面操作员进行实时通讯和数据传输。通常可用单独的电缆连接所有传感器和驱动器。
(2)定位与导航技术:在水下复杂环境中定位机器人并找到其路径是一项极为重要的任务,当前仅使用相机通过图像识别无法进行有效导航。
(3)清洗程度控制技术:基于清洗刷技术是水下清洁表面过程中使用最多的技术,与其他技术相比,其效率较高(200 m2/h至1000 m2/h),但它当不规则表面时,无法去除所有表面的生物污垢。
(4)机器人控制策略:水下机器人的控制系统要支持水下遥控和自主导航功能,并且需要保证其稳定性和安全性,以防止机器人在操作过程中意外受损或迷失方向。最常见的控制策略为根据清洗任务需要进行路径规划的跟踪控制策略。
[1] 张成林, 徐皓, 王世明, 等. 基于大型渔业平台的深远海渔业发展现状与思考[J]. 中国农学通报, 2020, 36(25): 152-157.
[2] 吴侃侃, 李青生, 黄海萍, 等. 我国深远海养殖现状及发展对策[J]. 海洋开发与管理, 2022, 39(10): 11-18.
[3] 何笑书. 泳池清洁机器人的研究与设计[D]. 杭州: 浙江工业大学, 2020.
[4] 衣正尧, 弓永军, 王祖温, 等. 一种超高压纯水射流船舶除锈系统设计方案研究[J]. 液压与气动, 2010(11): 26-28.
[5] Narewski M. Hismar-underwater hull inspection and cleaning system as a tool for ship propulsion system performance increase[J]. J Pol CIMAC, 2009, 4(2): 227-232.
[6] Amran I Y, Razal N S M, Isa K. Adaptive control simulation for multiagent autonomous underwater cleaning robot[J]. Indian J. Geo Mar Sci, 2021, 50(11): 938-943.
[7] 王书铨, 宫海, 王义杰, 等. 一种磁吸附壁面移动机构[J]. 机器人, 1995(1): 21-24.
[8] 吴明晖. 面向焊接任务的轮足式非接触磁吸附爬壁机器人研究[D]. 上海: 上海交通大学, 2014.
[9] 梅满, 朱大奇, 甘文洋, 等. 基于模型预测控制的水下机器人轨迹跟踪[J]. 控制工程, 2019, 26(10): 1917-1924.
[10] Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. Hoboken: Wiley, 2011.
[11] 周翔. 大尺度环境下的AUV路径规划与路径跟踪[D]. 青岛: 中国海洋大学, 2010.
An underwater robot for the bulkhead cleaning of farmer ships
Wang Yunjie1,2, Lin Liqun1,2, Ma Fengshuang1,2, Xu Zhiqiang1,2, Gao Diju3
(1.Fishery Machinery and Instrument Research Institute, Chinese Academy of Fishery Sciences, Shanghai 200092, China; 2. Key Laboratory of Ocean Fishing Vessel and Equipment, Ministry of Agriculture and Rural Affairs of the P.R.C, Shanghai 200092, China; 3. Shanghai Maritime University, Shanghai 201306, China)
U672.7
A
1003-4862(2023)09-0071-05
2023-04-23
山东省重点研发计划项目(2021SFGC0701);浙江省“尖兵”“领雁”研发攻关计划项目(2022C03023);中国水产科学研究院协同创新项目(2023XT06)
王云杰(1988-),男,助理研究员,研究方向:渔业水下机器人。E-mail:wangyunjie@fmiri.ac.cn