风电设备安装船自航状态下的水动力性能研究
2023-09-15金华
金 华
应用研究
风电设备安装船自航状态下的水动力性能研究
金 华
(舟山中远海运重工有限公司,浙江 舟山 316131)
自航自升式风电设备安装船作为目前建设海上风场的首选设备,其具备极大的甲板和较浅的吃水,在自航状态下受到波浪的运动响应较大。此次实验是根据相关资料自制的风电安装船(WTIV)的模型,采用计算流体力学(CFD)的方法,研究WTIV在不同海况下的水动力性能。通过使用STAR CCM+软件进行仿真数值模拟,计算不同海况下的振幅响应算子(RAO),并与实验数值进行比较。验证本文结果的正确性和模型建立的有效性,为风电安装船在波浪中运动的研究提供参考。
海上风力发电 振幅响应算子(RAO) 风电安装船 运动响应
0 引言
风电安装船是专门用于建造海上风力发电机的特种作业船舶。设计时需要其具备广阔的上甲板以及较浅的吃水。然而,如何准确的计算出风电安装船在海上的运动状态,还是非常困难。本文使用Star-CCM+软件来模拟三维数字波,并通过计算流体力学(CFD)研究风电安装船在不同海况下运动状态。采用雷诺平均Navier- Stokes(RANS)方程和k−ε湍流模型对湍流进行建模,采用流体体积(VOF)方法跟踪无过境表面的位置和形状。采用偏置网格技术处理运动振幅大的流体结构相互作用(FSI)问题。通过与实验数据的比较,验证了仿真结果的正确性,为WTIV在波浪中运动提供了理论指导和技术支持。
1 风电安装船仿真模拟理论基础
本文通过控制方程、波浪理论、波力消波、边界条件、数值离散方法、船体运动响应理论等理论方法来模拟计算风电安装船在各种不同的流体环境下的运动状态。
1.1 控制方程
计算流体流动运动时,必须进行连续方程和动量守恒方程的计算,通常情况下流体的流动主要由三大定律来奠基:能量、质量、动量守恒。在三维笛卡尔坐标系下,可以根据资料得出微分形式的连续、非定常、不可压缩流体的连续方程和动量方程:



雷诺平均应力张量计算公式为:

在数值湍流流动分析中,利用Realizable k-ω湍流模拟,求得Boussinesq 的湍流涡粘度与速度之间存在的一定关系的公式。湍流的动能k以及湍流能量耗散率ε根据Realizable湍流模型,由下列两条运输方程给出:


船体运动控制方程可表示为:
利用VOF(VOLUME OF FLUID)技术实现对自由液体表面的计算。这个技术的基本原理是,利用格子单位中的各流体参数与格子体积之比变量a来计算自由面的相对位置。a=1 表示此时网格单元内全部都是指定的相流体;a=0 则表示此时网格单元内没有所设置的特定相流体;0<a<1 则表明该网格单元内只有局部给定相流线。关于气液二相流线的自由面变化的求解方程组也可以写为:

式中:1 表示空气相,2 表示水相。
1.2 波浪理论
由波浪理论可知,因为收到来自外界的扰动,原本平静的自由液面将会开始运动。而由于惯性力的作用,液面的载荷会逐渐传递给周围的水质点,因此波面将做来回的往复运动,这就是波浪的形成机理。而在外界扰动消失后,由于液体自身的粘性作用下波浪逐渐衰减,直至恢复平静[1]。
1.3 波力消波
为了避免在海浪抵达水池后部区域时形成反射波,对给水池工作范围的正常工作造成影响,因此就必须对水池后部做消波处理。目前,在数值波水池中使用的消波法一般包括设置辐射边界条件法、主动消波法、设置阻尼区消波法[2]和波力消波法。本次实验则学习使用波力消波的方式。
根据kim等人的方法 ([Ringing Analysis on a Vertical Cylinder by EuleOverlay Method]),Simcenter STAR-CCM+ 可将3D流体模拟与由 VOF 波指定的理论求解结合起来。在给定距离范围内,使得离散化纳维-斯托克斯方程的解趋向大于另一个解(例如理论解或简化数值解),以便于通过更小的解域来降低运算工作量。这些力相互作用方式还可解决由于逐步力相互作用的阻尼特征所引起的在边界处表面波反射的问题。
波力仅适用于属性为动量的设定,没有添加相源或湍流源。通过给下列形式的能量传输(动量)方程的源项,来得到波力:
式中:为波力系数;是密度;为传输方程的初始求解;为波力求解的近似值。波力长度的最佳力区域长度为大约两个波长。由于力区域最初无法靠近相关的体,因此应使求解域长于两个波长。
1.4 边界条件
在本此仿真数值模拟所采用的软件STARCCM+中,设置背景在区域内各个面的边界条件以及初始属性是保证实验准确性的重要步骤之一,条件设定是必不可少的。本阶段介绍设定边界条件和初始属性的相关公式。
初始属性为在计算开始之前赋予研究对象的基本物理参数,即当计算等于0时整个系统的未知量的初始值。当时间为0时,本文默认自由液面为静止,结构物处于静平衡状态[3]。

边界条件是对计算域内各个截面的参数设定,在本次仿真数值模拟的STARCCM+软件中,六面体的背景计算域就需要对六个面的边界条件进行设定。根据研究对象及所研究的状态来选定不同的边界条件,不同情况不同定义。一般来说,边界条件有气液、固液、液液交界面等,本次仿真数值模拟设计的自由液面则是典型的气液交界面。
1.5 数值离散方法
通过上述的方程组得到解析解是非常困难的,不仅变量多,且各式变量也存在一定联系,因此通常都是以数值求解计算后的近似值来代替真实求解。使用计算流体力学方法时的离散数值分布方法基于以下基本概念:用连续离散点代替原连续域中的物理体积,这些点之间又可进行联立,称离散方程。目前主要的求解方式也是通过近似的未知变量来求解。方法有:有限元法、有限差分法、有限体积法等。
1.6 船体运动响应理论
为了分析风电安装船的耐波性能,基于波浪势流理论[4]计算分析风电安装船在不同遭遇浪向、不同波浪周期海况下的6自由度运动响应。求解的过程需要利用2.4内的边界条件方程组,然后联立拉普拉斯方程求出计算域中流体的速度势; 再根据伯努利方程求得船在水中所受的压强分布曲线;再沿船体湿表面积分就可以计算出船体此时所受到的波浪载荷。

式中: f为船舶遭遇波浪额入射力;f为船舶湿表面周围流体的绕射力;T为船体以自身航速自由度运动时受到方向上的辐射力;为压强分布;n为船体与流体作用面法线的方向。
利用频域中的广义波浪力、附加质量和阻尼,通过变换得到时域的广义波浪力、附加质量和延迟函数[5]。延迟函数可以写为:

式中:为频域中船体的阻尼阵。
时域中浮体附加质量表达为:
式中:为频域中船体的附加质量阵。
根据船体某一时刻在计算域中的运动方程求解船舶的运动特性[6]:

式中:为船体的广义质量阵;()为船体的附加质量阵;()为计算域系统的延迟函数阵;为船体的静水恢复力系数阵;为船体所受的广义力阵。
2 仿真计算工具
2.1 CFD介绍
计算流体力学(COMPUTATIONAL FLUID DYNAMICS.简称CFD)是构建在古典的流体动力学理论和计算技术方式基石上的一个新兴自主学科专业,其基本设定为利用电子计算机进行数字运算和图形表现,分析研究包括流体流动和热传导等有关物理现象的过程系统。与势流理论不同的是,计算流体力学将流体本身的粘性力考虑在内模拟最真实的流场运动。在处理以海洋工作设备为主的风浪流下的相互作用的模拟计算,有非常不过的验证效果。同时也可以深入研究波浪在不同海况下的非线性特征。它兼具理论性与实践性的双重优势,提出了多种概念与技术,对现代科学的一些复杂流体的传热现象提出了可行的计算技术。
2.2 STAR CCM+软件介绍
STARCCM+软件,是近年来海洋平台使用较多的一种商用的计算流体力学软件,它的仿真模拟功能非常强大[7]。算法则通俗易懂,且功能也非常强。在STARCCM+中,能够对连续体格子进行多种多样的设计,如四面体格子、六面体格子、十二面体格子、边界层格子、棱柱层格子等等。同时还可以通过对不同表面的导入模型实现自动恢复,如网格重建、表面恢复等。但在重新进行计算时,往往需要分隔区域以及在区域内重新定义物理量。因此除造船和海洋工程等领域以外,在热力学、汽车、建筑学等领域也都具有着广阔的应用领域。
STARCCM+的一般使用流程包含导入模板、表面修改、边界条件预设、分配网格特性、物理参数预设、计算器预设、输入报表和参数设置等。
3 风电安装船数值模拟和运动响应
3.1 数值模拟水池模型建立
本此数值模拟的WTIV三维模型是根据真实的风电设备安装船资料自行建立,如图所示。实船尺寸为=133.1 m,= 39.2 m、=9.8 m、=5.6 m。本文在仿真数值模拟时采用比例因子1:50的船舶模型进行试验。为保证虚拟水池精度,故水池模型尺寸为长取7.8 m,宽5.2 m,深度取5.2 m,如图1、图2所示。

图1 船体三维轮廓模型
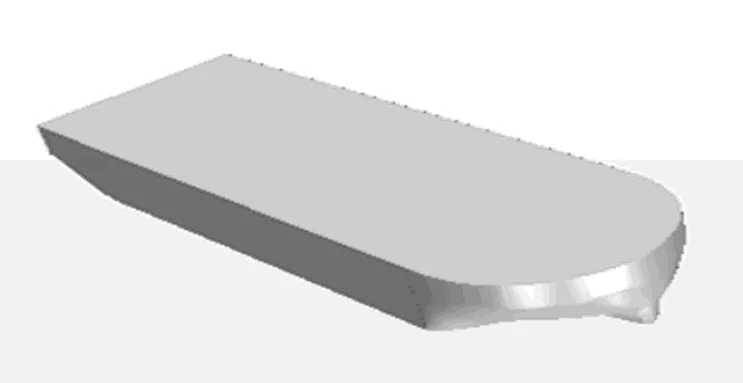
图2 船体外形立体模型
在软件仿真数值模拟中,为了提高精度需要在曲线过度曲率较大的地方设置加密区域,如球鼻艏或舵。并对边界条件进行设定,将其进口、底部、左右边界、后侧均设置为速度进口。由于本次仿真数值模拟在模拟波浪载荷作用时需要考虑到波力影响,因此只将顶部(空气界面)设置为压力出口[8]。而重叠计算域需要将边界设置为重叠网格。此仿真模型采用切割体网格划分为350万个,确保数据的准确性。本次仿真数值模拟选用三维隐式非稳态,对浪向角为0°、45°、135°,不同周期=8.518 s、11.141 s、13.164 s,波高为8.4 m大波。经过查阅相关资料,显示波浪周期在6~15 s时对WTIV的运动影响最大。因此本文选取三个典型波浪周期进行仿真模拟。实船航速选择8 kn和12 kn进行模拟。考虑到模型试验条件,利用傅汝德数相同进行航速的转化。转化公式为:
3.2 仿真数值模拟
设置初始航速为8 kn,遭遇浪向角为135°、波周期T=11.141 s的海况。
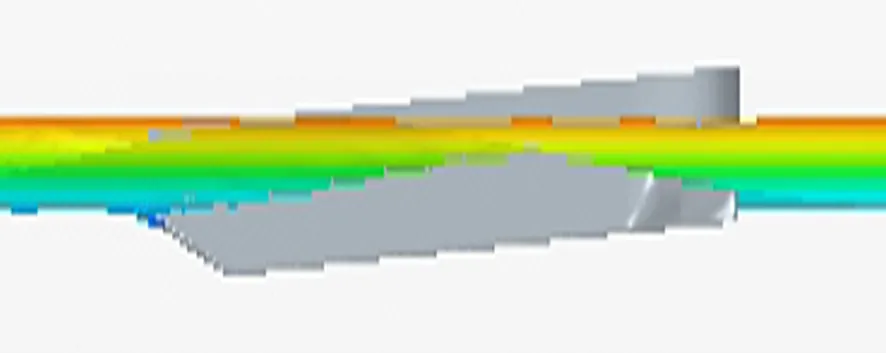
图4 侧视图
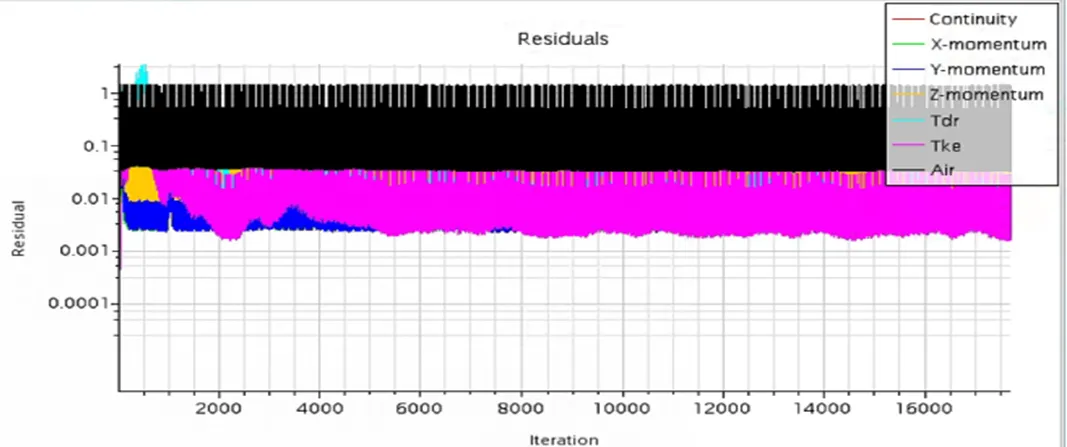
图5 计算示意图
图3为遭遇波浪时的侧视图、图4为俯视图,图5为各控制方程的计算结果图。从中可以看出非定常计算区域稳定,各残差都趋于收敛。图中Tke代表湍流动能(Turbulent kinetic energy)、Tdr代表湍流耗散率(Turbulent Dissipation Rate)。
通过对运行10.62 s时的纵摇和垂荡运动响应曲线图中可以看出纵摇和垂荡都呈现稳定的周期性。同时对甲板上浪情况观察,此状态下甲板上浪不是很明显,如图6所示:
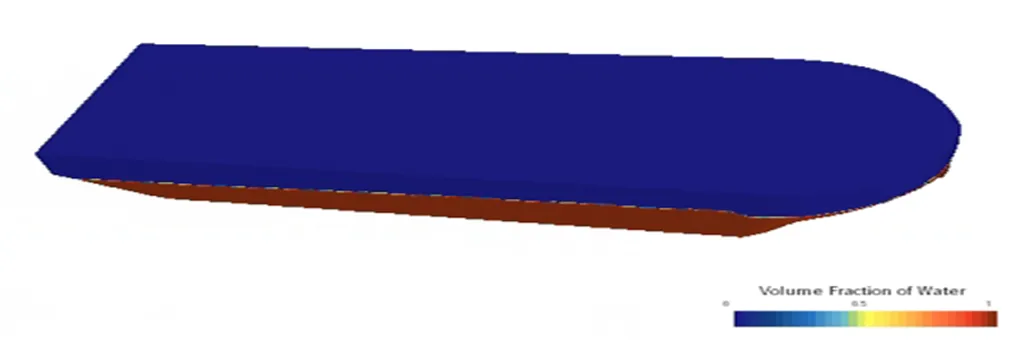
图6 甲板上浪图
同样的方法对以下不同海况进行模拟:1、初始航速为12 kn,遭遇浪向角为135°、波周期=8.518 s的海况;2、初始航速为12 kn,遭遇浪向角为135°、波周期T=11.141 s的海况;3、初始航速为12 kn,遭遇浪向角为135°、波周期=13.164 s的海况;4、初始航速为12 kn,遭遇浪向角为45°、波周期=13.164 s的海况;5、初始航速为12 kn,遭遇浪向角为45°、波周期=11.141 s的海况;
本次仿真数值模拟采用CFD技术,通过STAR CCM+软件对风电设备安装船在自航状态下的水动力性能进行了研究。通过比较本次数值仿真模拟的振幅响应算子(RAO)与实验数值,证明此次仿真模拟结果有效。再对不同航速、周期、遭遇浪向的海况进行模拟,最后根据计算所得数值及图表,得出如下结论:
1)比较了浪向角为135°,不同波浪周期下风电设备安装船的垂荡、纵摇响应曲线,各图像均呈现稳定的周期性波动,横摇的运动响应起初不稳定,但是后续也逐渐稳定,且数值仿真模拟计算所得的RAO曲线的趋势也与实验趋势相吻合,表明本文数值仿真模拟的准确性和可行性。此外本文所研究的三种波浪周期对船体的运动响应非常剧烈,表明此海况下航行存在一定危险性。
2)对于浪向角为45°的海况进行了两种不同波浪周期的数值仿真模拟。由于风电设备安装船自身吃水浅和宽阔甲板的结构特殊性,非常容易发生大面积的甲板上浪,但是从横摇和纵摇的相应曲线中可以明显的看到甲板上浪在一定程度上大幅度影响了摇动响应幅值,使得危险性大幅度提升。
本次数值仿真模拟的角度仅有135°和45°,且计算的波浪周期都是6~15 s内的危险周期。其实可以研究更多的遭遇浪向和其他更加安全的周期。探究其他遭遇浪向下的运动响应情况,并探究周期在6 s以下的海况是否安全。还可以研究其他航速,如6 kn、14 kn等更满或者更快的航速下,其运动响应。
4 结束语
由于本次数值仿真模拟的时间有限,因此同时开启三轴自由度旋转时,横摇运动和纵摇运动在短时间内都无法稳定,因此其RAO数值有待验证。若设备能力足够,应该计算至运动响趋于稳定。
[1] 朱红钧, 林元华, 谢龙汉. Fluent 12流体分析及工程仿真[M]. 北京: 清华大学出版社, 2011: 11-27.
[2] 张泽, 刘敬喜, 胡立鹤, 等. 风电安装船风暴自存下总体性能分析研究[J]. 船舶工程, 2014, 36(3): 37-53.
[3] 姚智. 恶劣海况下浮式海洋平台非线性气隙及波浪砰击预报方法研究[D]. 镇江: 江苏科技大学, 2020.
[4] 戴遗山. 舰船在波浪中运动的频域与时域势流理论[M]. 北京: 国防工业出版社, 1998.
[5] 钱昆. 浮体在大幅波浪中的运动和荷载计算研究[D]. 大连: 大连理工大学, 2004.
[6] Li B W, Li C X, Zhang D, et al. Optimal configuration of bistatic sonar system using Cramér-Rao lower bound of position estimation[J]. Chin J Acoust, 2022, 41(1): 63-72.
[7] Liao S J, Peng Z H, Cai J Q. Resource scheduling base on Bayesian Cramer-Rao lower bound for multi-target tracking in netted colocated MIMO radar systems[C]//2021 40th Chinese Control Conference (CCC), Shanghai, China: IEEE, 2021: 1791-1796.
[8] Jin H Q, Zhang H C. Hydrodynamic performance of an array of truncated cylinders with nonlinear stiffness mechanism[C]//Abstracts of the 8th International Conference on Vibration Engineering, Shanghai: Chinese Society for Vibration Engineering, 2021: 127.
Study on hydrodynamic performance of wind power equipment installation ship in self-navigation state
Jin Hua
(COSCO shipping Heavy (Zhoushan) Co., Ltd., Zhoushan 316131, Zhejiang, China)
U661.71
A
1003-4862(2023)09-0063-05
2022-08-22
金华(1984-),男,工程师,本科,主研究方向为船舶与海洋工程。E-mail:jinhua0729@163.com