三相异步电动机定子磁场可视化教学系统设计
2023-09-13何顺帆
程 立, 姚 为, 何顺帆, 李 明
(中南民族大学计算机科学学院,武汉 430074)
0 引言
目前国内各高校自动化等专业广泛开设了电机及拖动基础这一课程,并出版了多种教材[1-2]。在该课程教学中,三相异步电动机是其中的重要内容。异步电动机定子绕组所产生的旋转磁场是该课程理论中非常关键的知识点,对这一概念的正确理解是学好该电机的基础。在教学中主要的问题有两点:①学习者对定子绕组的布置难以掌握,且定子布线太过密集,即使观看实物作用也有限;②定子磁动势和磁场看不见摸不着,学习者难以理解与其相关的概念。这些知识点非常抽象,公式繁多,仅通过教材上的公式和插图难以表达清楚,教与学都难以取得好的成果。为解决这一问题,广大相关专业教师撰写了大量的教研论文,其中既有从理论上分析电机旋转磁场的著作[3-6],也有从可视化角度具象化旋转磁场的文章[7-10]。对于前者,仍未能解决学习中概念抽象的问题;后者涉及的论文多以有限元[7]、VB 语言[8-9]和Matlab Simulink[10]为工具对异步电动机的旋转磁场进行模拟和仿真,但均未考虑绕组布置和定子磁动势,且在可视化磁场时,只考虑了磁极对数、相序变化和通电相数三者中的某两项对定子磁场的影响,未能全面考虑这些因素。
本文参考了教学可视化方面的论文[11-14],并利用Matlab设计了三相异步电动机的定子绕组、绕组中电流的变化、定子磁动势和磁场动画,通过动画展示抽象的概念,全面展示电流频率、磁极对数、相序变化和通电相数等因素对定子磁场的影响,在教学中配以适当讲解和分析,让学生更直观地学习这些抽象难懂的内容,建立旋转磁场等概念,以改善教学效果。
1 异步电动机定子绕组及其磁场
1.1 旋转磁动势和磁场
在异步电动机的三相对称绕组中通入三相对称互差120°的交流电流,将会产生旋转磁场,它的转速、幅值、转向和位置分别满足4 个定律[5-6],即:
(1)转速定律。磁场的转速(同步转速)ns由电源频率f和定子磁极对数p确定,其关系为ns=60f/p。
(2)幅值定律。磁场和磁动势基波在定子圆周上为p个完整的余弦波,且幅值恒定。
(3)转向定律。磁场的转向由三相电流相序确定,从超前相转向滞后相。
(4)位置定律。旋转磁动势的正波幅位于电流达到最大值的那相绕组的对称轴上。
设Fu=Fφ1cos ωt,Fv=Fφ1cos(ωt-2π/3),Fw=Fφ1cos(ωt-4π/3)分别为三相交流电与其所流过绕组参数的乘积,则三相绕组所产生基波磁动势分别为:
式中:Fφ1为各相电流有效值和绕组参数的乘积,即基波脉振磁动势的幅值;ω =2πf为交流电角频率;x为假想将电动机定子内壁圆周展开后的距离;τ为极距。将fu1,fv1,fw1叠加,可得其表达式为
三相脉振波的合成波f1为行波,其平移速度v=dx/dt=ω/(π/τ)=2fτ。显然,将x复原到定子内壁的圆周上,则平移运动变为转动,平移速度v对应的转速为ns=60(v/r)/(2π)=60f/p,此即为同步转速。若交换电动机任两相绕组的电流,如互换V相和W相电流,即将式(1)中的Fv和Fw互换,则式(2)叠加结果为
此时速度v=-ω/(π/τ)=-2fτ,平移速度方向与未交换时相反,对应转速也反向。同理,互换别的两相绕组也可以得到相同的结果。根据以上分析可从理论上证明异步电动机互换任两相电流可实现其定子磁场的反向旋转。
要得到式(2)f1表示的行波,三相绕组需在位置上满足式(1)中相位相差120°的位置关系。U相和V相(任两相)绕组位置差可由式(1)中的πΔn/τ -120° =0 得到,则有Δn=2τ/3 =120° ×Q1/(360°p)=120°/a。此处Q1和a分别为定子总槽数和槽距角,可得两相绕组间相距槽数为Δn=120°/a,即对应120°电角度。为简便起见,本文动画系统只考虑fu1,fv1,fw1所表达的基波磁动势和它对应的磁场,未考虑高次谐波成分,且绕组为单层整距结构,与教材中分析的结构相同。
1.2 绕组布置
由以上分析可得任两相绕组间的位置关系,且每相绕组在圆周上均布,同一绕组的两条边相距一个极距τ,由此可得异步电动机定子绕组参数间的关系[1-2]:
式中:m为电源相数;q为每极每相槽数。根据式(3)~(6)布置绕组,且三相绕组的布置相同,仅在位置上相差Δn个槽。因此在已知总槽数Q1和磁极对数p的情况下,可由式(3)和(5)完成某相绕组的布置。完成该相绕组的布置后,再按式(6)确定另一相绕组第1 个绕组边的位置,并按已完成的绕组相同方式进行处理,这样即可完成三相绕组的布置。
2 磁场动画系统设计
Matlab具有强大的绘图功能,它不仅可绘制静态图形,还具有动画设计功能。它生成动画的方式逐帧动画、轨迹动画和程序动画[15-16]。
设计动画时,绘制出定子圆周上一个周期T(T=1/f)内某时刻绕组线圈中的电流和由它们所形成的磁场,在下一时刻,重绘新的电流和磁场,将这一过程在多个周期采用循环的方式实现,通过上述第3 种动画方式中的drawnow指令刷新绘图窗口,达到动画的效果。为使系统能尽可能地模拟各种参数下的定子磁场,需要充分考虑在不同磁极对数,不同槽数和不同通电相数条件下产生的磁场。
动画系统包括参数设置界面、绕组的布置和绘制、电流的展示、磁动势曲线的绘制和磁场的绘制,流程如图1 所示。
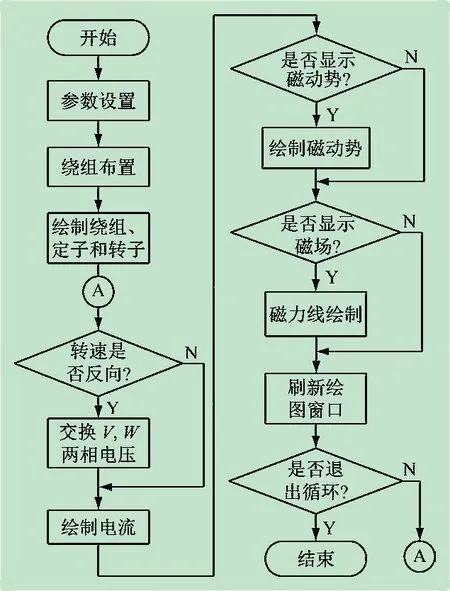
图1 磁场动画系统程序流程
系统中磁场的绘制较为复杂,需要考虑在缺相和不同极对数时等各种情况下磁力线的不同形状。根据磁极对数和通电相数的不同,磁力线采用椭圆、带弦圆弧和圆表示,且绘制成虚线,以和磁场不可见相符。
2.1 绕组的绘制及结果
动画中电动机的定子、转子和绕组均为横截面,采用圆表示,且文中不区分绕组边和槽。绘制电动机定子时,用两个同心圆分别表示定子内外壁。定子内壁里侧均布Q1个用于表示绕组边的小圆,按1 -Q1编号,UVW三相绕组分别用红绿蓝3 种颜色加以区分。布置绕组时,首先确定U相1 个相带下q个绕组边,如1 ~q号边(槽)为U相绕组第1 个相带的上层边U1,则1 +τ ~q+τ为其对应的下层边U2。通过这种方式分配第1 对两相邻磁极下的2q个绕组边,其余p-1对两相邻磁极下的绕组边按对应相距2τ 个槽以相同方式布置。处理完U相后,按式(6)确定的Δn分配V相的第1 个相带的上层边V1,并以与U相相同的方式布置其绕组边。布置完V相绕组后,按相同方式布置W相绕组。绕组边的布置如表1 所示。
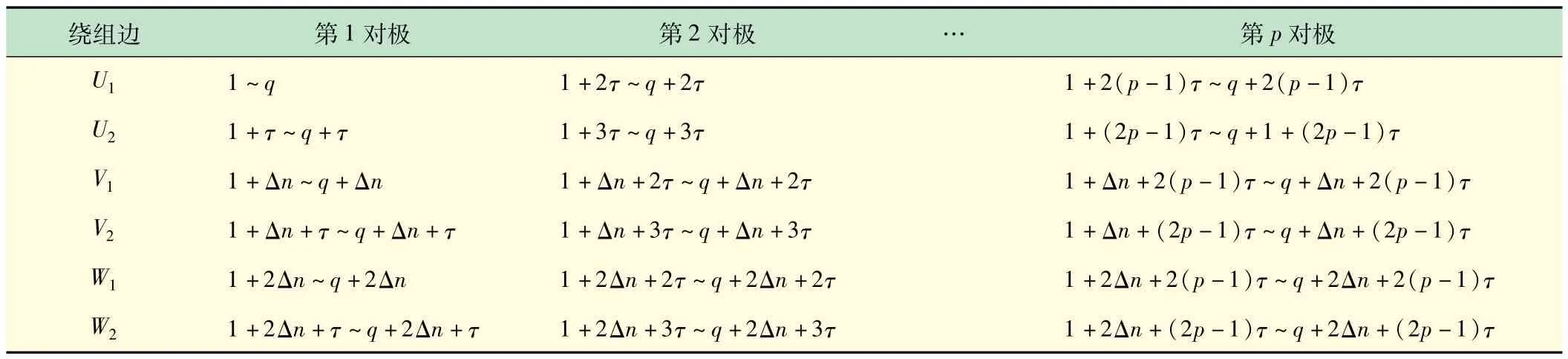
表1 绕组布置表
系统中定子槽数和磁极对数均可通过界面灵活设置,两者间关系满足式(5),图2 所示为通过界面设置槽数和磁极对数后显示的结果。在动画中,确定了槽数和极对数后,绕组边的分布将固定不变,变化的是绕组中的电流、产生的磁动势和磁场。

图2 动画系统参数设置界面
2.2 电流变化的动画设计及结果
三相绕组中通入三相电流后,在任一时刻,某相绕组中电流大小相同,上、下层边中电流流向相反,且其所有上、下层边中电流方向各自相同,为流进或流出。动画中在绕组边圆心处用黑色圆点和红色叉号分别表示电流流出和流入,并以点的大小表示电流大小;同时规定电流值大于0 时从绕组上层边流出,从其下层边流入;小于0 则相反。在动画的循环中,分别计算某一时刻三相电流大小,并按以上规定绘制各绕组中的电流。通过动画的运行可观察到绕组中电流的变化规律:单个绕组边中的电流只会在最小值和最大值间变化,假想电流可见,则所有绕组边中电流的配合形成“转动效应”。由此可见,通过各相绕组边中的电流在时间和空间上的配合,在固定的绕组中形成定子圆周上的“转动电流”,产生旋转磁动势和磁场。图3 所示为总槽数24,1 对极定子绕组中电流变化状态图,从图中可明显观察到电流的变化,在动画中形成旋转的效果,这样变化的电流必定产生旋转的磁场。
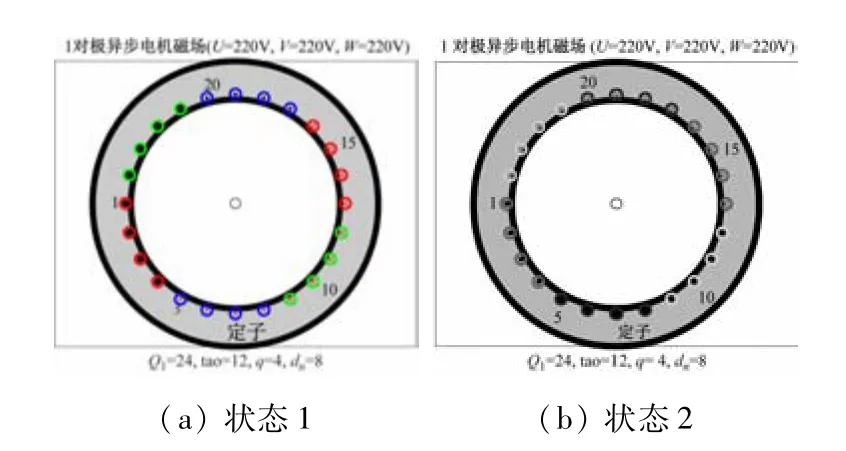
图3 定子绕组中的变化电流
2.3 磁动势动画设计及结果
将式(1)中磁动势的三相余弦波绘制在直角坐标系中,将可展示3 个脉振波和由它们合成的行波,如图4(a)所示,它为选中界面复选框“圆周伸展”后显示的波形,即假想将定子圆周剖开拉直后的磁动势。在动画处理中,通过时间的多周期运行实现循环,其中运行总时间取电源周期T的整数倍,1 个周期内时间增量Δt=1/(C·p),C为常数。根据以上处理可知,极对数p越大,则Δt越小,1 个周期中运行的次数越多,行波的运动速度越慢,反之则越快;电源频率f越大,则周期T越小,行波速度越快。将该波形绘制在定子圆周上得到的旋转磁动势同样满足上述关系。因此,在界面参数设置中增大磁极对数p和电流频率f,磁动势和磁场转速将分别减小和增大,反之则分别相反,通过这种方式定性模拟了异步电动机的同步转速ns=60f/p这一关系。

图4 极对数为3时的磁动势
图4 (a)中红绿蓝3 种颜色的余弦波为三相电流各自对应的脉振波,黑色曲线为3 个脉振波叠加而成的行波,它包含p个完整的余弦波,将该行波绘制在定子圆周上可得图4(b)~(d)中红色实线,即定子磁动势波形。在图4(b)中,红色虚线所表示的圆为磁动势波形旋转过程中正向波幅顶点所经过的轨迹,通过这一特点,可验证幅值定律,即磁动势在定子圆周上为p个余弦波,且幅值恒定。图4(c)和(d)所示为三相电流不对称时的磁动势运行过程中某一时刻的波形及波形顶点的运行轨迹。其中图4(c)所示为V相电压为0 时的旋转磁动势。图4(d)所示为缺两相时产生的磁动势,其波形不会旋转,只在最大值和最小值之间来回波动,形成脉振磁动势。
选中界面上的“转速反向”复选框后,系统交换V相和W相电流,可实现图4(a)~(c)中波形的反向移动和旋转,并辅以定子三相绕组的位置关系,可验证转向定律:磁动势和磁场的转向由电流相序确定,从超前相转向滞后相。结合理论证明,说明交换异步电动机任两相电流,可实现定子磁场反转。在动画运行中,保存三相电流分别达到其正向幅值时的定子磁动势波形,如图4(b)所示为U相电流达最大时的磁动势,可让学生自己在图形上作出各相电流最大时其对称轴和连接此轴附近该相q个绕组的两条边,观察它们是否满足位置定律。
2.4 磁场动画设计及结果
在动画的循环处理中,除绘制电流外,还需按照电流值的正负将所有绕组边分为流进和流出两类,显然每个相带中绕组边的电流方向均相同。然后按绕组边位置相邻(即编号连续)的特点对其进行分组,其中电流流进和流出的绕组边均被分为p组,Q1个绕组边共分成2p组,每组含kq个边,k为通电相数,其值为1、2、3,分别对应通电相数1、2 和3 相。确定了电流流向相同的各个相邻绕组边分组后,通过右手定则和磁路的安培环路定律绘制包围每个分组中所有kq个绕组边的封闭磁力线。表2 为槽数取36 且不同磁极对数和不同通电相数时在某一时刻的绕组边分组表,其中方括号内部为同一组的槽号,不同的分组用分号隔开。确定分组后,根据它们所占机械角度来绘制不同形状的磁力线。
动画中磁力线的形状随磁极对数和通电相数的变化而不同,可由每个分组中槽所占机械角度来确定,根据式(3)~(5),将出现3 种不同情况。
(1)不缺相时一个分组中所有3q个电流流向相同的绕组边占定子圆周弧长为τ,其对应角度为θ3q=180°/p,当p取1 时,该角度最大为180°。
(2)只有两相通电,此时将存在2 种情况:无电流的q个绕组边分别位于分组的一侧和中间,其对应角度θ2q分别为120°/p和180°/p。该角度最大值分别为120°和180°。
(3)只有1 相通电,则每个分组中只有q个绕组边有电流,机械角度θq=60°/p;此外,在这种情况下,如果q为1,则此时只有该相的一个绕组有电流,认为其对应角度为0°。
通过以上分析,磁力线分为3 种形状:椭圆、带弦圆弧和圆,统一由分组中通有电流的绕组边所对应机械角度的大小确定其形状。①当分组中绕组边对应机械角度不小于120°时,磁力线用带弦圆弧表示;②当角度大于0°且小于120°时,采用椭圆表示磁力线,椭圆长轴位于分组中有电流的首末两个绕组边圆心的连线上,中心为连线中点,短轴按与长轴成一定比例选取;③当角度等于0 时,用包围通电绕组边的同心圆表示磁力线。除此之外,通过右手定则确定磁场方向,并在磁力线上用箭头指出。
图5 所示为不同的总槽数、磁极对数和通电相数时定子磁场的几种形态。其中图5(a)、(b)所示为绕组中通入三相对称交流电时产生的磁场,即圆形旋转磁场,此时磁场由相邻的p对各含3q个绕组边中的电流形成,磁场匀速旋转。该磁场波形由磁动势产生,也为余弦波,且幅值恒定。图5(c)、(d)所示为缺1 相电流时产生的磁场,即椭圆旋转磁场。电动机只通入了两相交流电,磁场仍然可以旋转,磁力线在包围全部相邻的3q个线圈边(有q个绕组边中无电流)和2q个绕组边(均通有电流)两种不同状态下更替。图5(e)、(f)所示为缺两相电流时形成的脉振磁场,此时电动机定子磁场的磁力线包围q个绕组边,方向在顺时针和逆时针间交替变换,磁场不会旋转,只会在固定位置上由南极变换到北极,再又从北极变换到南极,形成脉振磁场。通过磁场动画,还可直观地展示磁场旋转过程中对定子绕组和转子绕组的切割。
最后需要说明的是,动画中绘制的磁力线出现的位置有限,根据通电相数k的和极对数p不同,只有2(k=1)和2kp(k=2,3)个不同位置,未能像动画中磁动势旋转那样位置“连续”变化,而是一次移动q的整数倍个槽。
2.5 动画系统的应用
磁场动画系统不仅可应用于理论课程以辅助教学,还可在实验课程中让学生自己操作,通过界面灵活设置参数,让学生深入理解异步电动机定子绕组布置以及旋转磁动势和磁场,掌握其中抽象的知识点,可起到实际电动机达不到的效果。此外,还可对本系统做进一步的完善,增加转子的运行,在考虑各种负载的情况下对异步电动机进行动画仿真,让学生通过动画,更加深入地掌握异步电动机的基本原理。
3 结语
异步电动机定子磁场动画系统可通过Maltab GUI界面灵活设置绕组参数和电气参数,界面友好、操作简单,实现良好的可视化效果。动画能够展示不同槽数和磁极对数下的绕组布置以及电流频率、通电相序、磁极对数和通电相数等因素对磁动势和磁场运行的影响。通过在教学中演示该动画,可以使学习者直观理解绕组的布置、定子旋转磁动势和磁场的转速、幅值、转向和位置所满足的相关定律,建立旋转磁场的概念。除此之外,还可以将该软件作为实验的一个环节,让学习者自己摸索,加深他们对以上知识的理解。
