基于双目视觉的大坝边坡表面变形监测技术研究
2023-09-13李瑾丁勇李登华
李瑾 丁勇 李登华
1.南京理工大学 江苏 南京 210094 2.南京水科学院 江苏 南京 210094
目前,大坝边坡监测技术和方法有着广泛的应用,主要仪器有全站仪、GPS、大坝边坡雷达、应力传感器等,这些方法或是过于依赖人工,或是消耗较大,或是技术要求比较苛刻。而双目立体光学测量方法具备工作效率高、准确性好、控制系统结构简单、费用便宜的特性,非常适合于生产场所的在线、无接触式生产监测与品质管理。双目光学技术的快速检测、非接触式的特性,也日益应用于制造业产品设计上。这种方法也会受到影响根据天气条件,如雨和雾,但图像中有雨去除和图像去雾算法可以用来减少这些影响。该方法已被用于研究大面积位移测量[1-2],包括滑坡位移监测[3-4],露天矿边缘位移监测[5],公路大坝边坡监测[6]。
立体匹配在双目视觉中至关重要,但在夜间缺少背景与大量且准确的特征点的情况下,利用sift与surf我们难以进行准确的配准,基于以上原因本文提出了基于delaunay三角网格的立体匹配技术,首先准确找到左右视图标志点的二维坐标,并通过每个视图各个标志点点之间的空间坐标关系生成的delaunay三角网,利用三角相似函数计算相似度大于阈值的三角形[7],并通过相似三角形的相邻点判断出正确的匹配点,从而提高匹配精度,并且获得正确的精确三维坐标。
1 系统设计
本文采用了基于双眼视觉的边坡图像采集信息系统,包含监控点设定、图像收集、双目视觉测量等信息,对模型岸坡坡面及坡顶的位移进行监测。为了更准确获得目标的立体像对,本文作者在边坡表面上设定了红色的小球单元作为检测目标点,红色小球的尺寸、布设形式可按照识别准确度和计算速度快的特点综合确定,通过在模型槽正前方架设DS-2CD3T86FWDV3-I3S型号海康威视红外筒形网络摄像机,在初次安装时需要对标定板进行标定。标定板长宽为25mm*25mm,格数为9*11的黑白棋盘格,图1为图像采集系统整体布置。
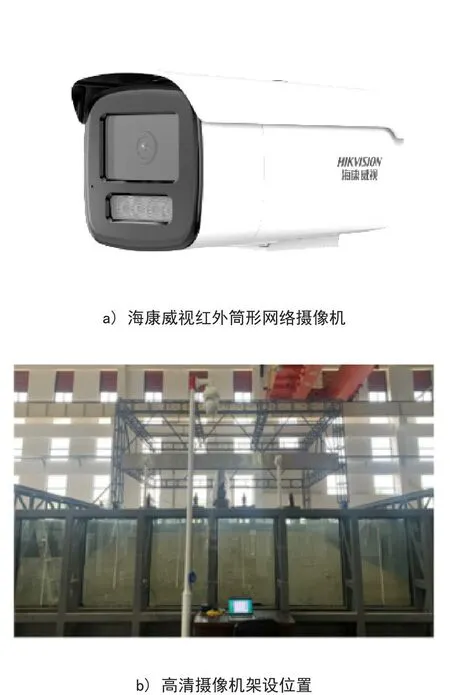
图1 图像采集系统
基于双目视觉的技术特点,本文使用了二台彩色照相机在不同位置同一时间拍照的边坡。视频数据则可进入图像控制器,再经过分拣、挤压后传输至服务器设备,从而获得视频帧进行边坡的立体映像。基于Delaunary三角剖分的双目匹配是检测系统的核心部分,由于距离较远且标志物过多,大坝边坡背景中的特征点难以匹配,只能通过标志物矩阵中的各个标志物间的拓扑关系进行匹配,由于剖分网格中三角形的大小和标志物距离摄像机的距离有关,所以在原有相似度的情况下优化三角形的相似度系数。根据双目匹配计算图像对应点间的位置偏差,基于视差原理来获取物体三维信息。监测系统的运行过程,如图2所示。

图2 工作流程
2 基于Delaunary的双目匹配
拓扑学中三角剖分技术在很多方面都有广泛的运用。本文将重点在通过标志物的二维坐标建立边坡Delaunay三角网。根据三角形相似度和摄影不变量理论对左右图像的标志物进行匹配。
常见的Delaunay三角网的生长技术算法主要有分治算法、逐点插入方法和TIN生长方法。本文中通过逐点插入算法,将创建Delaunay三角网格的大致过程为:
(1)定义一个可以包括所有标志物点的初始三角形,从标志物点集合中任意选择一点插入初始多边形,建立起始三角网。
(2)在起始三角网中插入任意另外一个标志物点,在起始三角网中找出含该点的三角形,将该三角形的3个顶点与新插入的标志物点连接,形成新的三角网,再用LOP优化方法对新三角网优化。
(3)不断循环步骤(2)的方法,等到标志物点全部插入,最终将与起始多边形顶点相关的三角形全部删除。
本文利用三角形的相似度进行三角形匹配,设△ABC和△A1B1C1中,将三角形中三个角按从小到大排序,按照大小顺序进行一一对应,且假设∠A的值为α,相对应∠A1的值为α1,因此三角形的相似度计算方法如下:
本文进行双目匹配的基本步骤如下:
(1)首先,根据生成的三角网格,将每个点周边的三角形定义为一个集合。
(2)对左视图中的点对右视图进行匹配时,只对三角形集合个数相同的点进行相似度匹配。
(3)对两点周边三角形集合所有三角形进行相似度匹配,所有相对应的三角形相似度均大于阈值,则成为两点配对成功。
3 仿真实验
本文在实验室内模拟验证了基于双目视觉的大坝边坡表面位移监测,监测点通过手动控制边坡滑动制造位移。本文采用两台DS-2CD3T86FWDV3-I3S型号海康威视红外筒形网络摄像机采集图像流,图像像素为3840×2160。
首先采用张正友标定算法对左、右相机的内参进行标定,通过立体标定算出左、右相机之间的相对位置关系,得到相机的内外参数与相对位移关系,表1如下。

表1 系统标定参数

表2 双目匹配准确度
选取未冲刷前左右摄像机同时拍摄的一组图像,记为初始时刻t0,如图3所示。

图3 初始图像
将原始图像中的标志物进行颜色以及形状特征提取,得到二值化图像,再将二值化图像进行霍夫圆提取,得到每个标志物的中心像素坐标。对提取的坐标进行亚像素化。对得到的左右图像标志物坐标按照第三章的方式进行三角剖分,得到三角网格。
将每个点周围的三角形做一个集合,设左图点a,三角形集合为n,右图对应点为a’对应三角形集合为n’,对a与a’进行匹配时,首先对n与n’集合的个数进行对比,个数相同对n与n’集合中的三角形相似度根据第三章的公式进行计算,若每一个三角形匹配相似度最高值都大于阈值,则a点与a’点相匹配,图像如图4。
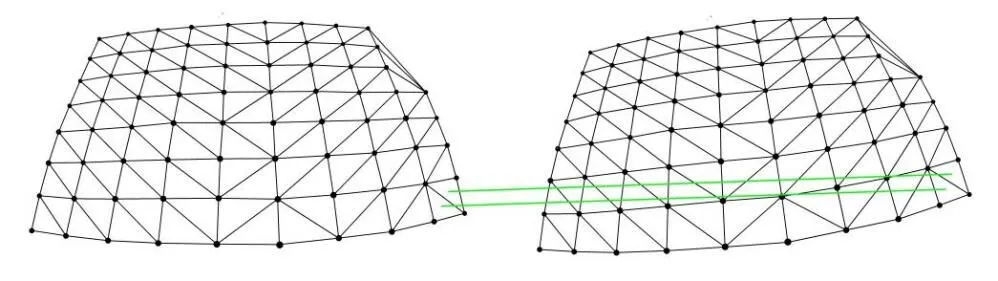
图4 三角形匹配示意图
通过左相机每个标志物点所在的三角形去匹配右相机每个标志物点所在的三角形,当三角形个数不相同时,判断两点不为同一点,选取下一点匹配,直到三角形个数相同时,进行下一步。对三角形个数相同的点周边三角形依次根据公式进行三角形相似度匹配,对所有三角形相似度都大于阈值,即可认为两点匹配成功。
将相匹配好的两点与得到的系统标定参数通过最小二乘法求解可得到该点的相机坐标。
分别选取t = 0min,t = 25min,t = 55min三个不同时刻的图像,计算并统计出每张图像各个标记点的像素坐标,利用这些坐标计算出各个标记点的世界坐标,并且其余时刻与t= 0min时刻进行对比,示意如图5、图6:

图5 不同时刻监测点三维坐标示意图

图6 不同时刻与初始时刻对比示意图
通过监测结果表明,在模拟试验中,随着时间的增加,边坡是逐渐下沉的,且坝中下沉是最为明显的,坝中位移最大超过1000mm,两侧位移偏小,略小于500mm,最大沉降变形超过大坝边坡整体高度30%。
4 结语
研究了基于双目视觉的大坝边坡表面变形监测技术,由于标志物过多而采取Delaunary三角剖分的双目视觉匹配,实现了三维测量。该方法主要是通过对平面上的点集进行三角剖分,根据标志物点周边三角形相似度对标志物进行双目匹配。通过实验验证,该方法一定条件下双目匹配准确度高达百分百,满足了进行三维测量的前提条件。并通过试验验证了通过此方法对大坝边坡进行三维监测的可行性。
