GAMIT/GLOBK 软件在地壳形变监测中的应用
2023-09-12纪海源何远梅王拉出
纪海源,何远梅,王拉出,殷 琼
(1.陕西工业职业技术学院,陕西咸阳;2.中国有色金属工业西安勘察设计研究院有限公司,陕西 西安;3.陕西新旅程测绘科技有限公司,陕西 西安)
1 GNSS 监测概况
随着全球卫星导航系统 (Global Navigation Satellite System,GNSS)的快速发展,连续GNSS 监测技术在地壳变形监测中得到了广泛应用,对连续GNSS数据处理的精度和效率也提出了更高的要求。中国地壳运动观测网络工程和陆态网络工程已建成有成叟上千个GNSS 连续观测站和流动观测区域站,积累了大量的GNSS 原始数据。本文以网络工程中汾渭及邻近区域多期GNSS 连续站和区域站数据为研究对象,采用GAMIT/GLOBK 高精度软件处理数据,在处理过程中编写脚本语言,使数据处理更灵活方便,同时加入必要的模型改正,最终得到高精度的GNSS 坐标和位移时间序列,为进一步研究地壳运动分析提供基础数据。
2 数据处理软件简介
2.1 GAMIT/GLOBK 软件介绍
GAMIT/GLOBK 是一款免费的、公开的基于UNIX/LINUX 操作系统开发的高精度GNSS 数据处理与分析软件,加入高精度起算点和精密星历进行短基线解算时静态相对定位精度可达1~3 mm。
GAMIT/GLOBK 不仅具备精度高、功能强大等特点,而且源代码完全对外开放,可以根据用户对数据的实际需求,定制脚本语言,人机结合进行数据处理;采用GNSS 载波相位观测方式,是目前国际上最优秀的GNSS 定轨和定位数据处理软件之一,在科学研究领域得到了很广泛的应用[1]。
GLOBK 软件是一个卡尔曼滤波的过程,对空间大地测量和经典大地测量得到的初步处理结果进行后处理分析。数据处理的对象主要是一些准观测量(例如:卫星轨道、测站坐标、地球自转参数),以及方差- 协方差,对这些参数进行滤波、平差后得到最佳结果。GLOBK 包括以下四类模块[2]:
(1)htoglb(格式转换模块):是将GNSS、SLR 和VLBI 等软件分析的结果转换为GLOBK 识别的文件H-file 中,H-file 是一个二进制文件。
(2)图形绘制模块:来调用GMT 绘制时间序列图与速度场等。
(3)GLRED、GLORG 和GLOBK:是运算模块,GLRED 一般用来分析当天解决和生成坐标时间序列;GLORG 是为平差定义参考框架,进行坐标系统转换;GLOBK 是实现软件的主要模块,用于平差。
(4)其他辅助模块:分析板块运动与框架的关系,为GLOBK 模块服务等。
2.2 TEQC 软件介绍
TEQC(Translation Editing and Quality Checking)是一款GNSS 数据预处理软件,简单易用;由美国卫星导航系统与地壳形变观测研究大学联合体共同开发的软件,是公开免费为地学研究GNSS 监测站数据管理服务开发的,有格式转换、质量检核、编辑、单点定位四个主要模块,这四个模块相互独立、互不影响,既可用单个模块实现单个功能,也可使用模块组合,同时实现多功能处理[3]。
3 GNSS 数据处理
3.1 数据预处理
GNSS 观测数据预处理,是精密应用的重要环节;首先采用TEQC 软件对研究区域(汾渭地区)36 个连续站和227 个区域站原始数据进行预处理,对非标准RINEX 文件进行适当的编辑:剔除误差较大、观测时间太短的观测数据,剔除其中的病态数据,同时修正出现在原始数据文件名里中不合格的字母、在解算过程中出现的与数据质量有关的问题要对原始数据进行质量分析后重新解算[4];TEQC 软件计算结果最核心的部分是质量检查统计结果文件,用来评定GNSS 观测数据的质量;表1 是G352 站检测结果的视图文件。
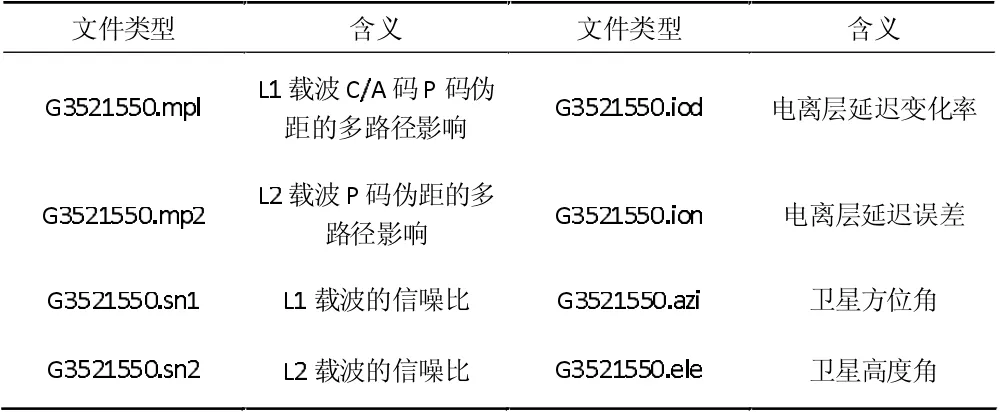
表1 视图文件
结果文件可以对质量进行多路径效应分析(MP1、MP2)、电磁干扰情况(IOD1,IOD2)分析、数据完好性分析、信噪比分析。
3.2 GAMIT 基线解算及精度分析
GAMIT 软件是一个没有图形界面的程序,只能在终端中采用命令进行,时常提供两种处理方式,一种是分步操作,另一种是批处理操作。本次处理用GAMIT 自带的编程语言shell,自制批量处理脚本(do_gamit)进行。数据处理过程分为两个阶段,首先利用GAMIT 软件解算连续站36 个和中国大陆及其周边的IGS 站联合86 个,其次是区域站227 个和IGS站86 个联合解算,得到单日基线解、极移和卫星轨道参数的单日松弛解及其方差- 协方差矩阵基线解算过程如下:
3.2.1 do_gamit 脚本文件结构
在当前工程目录下建立名称为:IGS、SP3、LOCAL、TABLES 文件夹,会自动生成一个YEAR 文件夹,这里的处理结果文件是按年积日存放。图1 是do_gamit 脚本文件结构形式。

图1 do_gamit 脚本文件结构形式
3.2.2 tables 文件夹下的配置文件
(1)station.info 文件:在TABLES 文件夹里面复制一个station.info 文件,放到LOCAL 文件下,保留station.info 中的头文件信息,删除其他全部信息,执行sh_upd_stnfo 自动提取观测文件的有关信息,生成station.info,判断生成的信息是否正确。
(2)vg_in(先验坐标文件):记录各测站的近似坐标。执行sh_rx2apr 命令,自动生成,利用svpos 和svdiff 模块单点定位生成站点坐标。
(3)sestbl.:在GAMIT 基线处理时过程中,对处理模型进行设置的文件。
(4)sittbl.:是一个精度指标文件,用来控制测站的,对精度高的已知坐标强约束,待求点坐标松弛约束。
3.2.3 do_gamit 脚本执行
在TEST 总文件夹下打开终端输入:“csh do_gamit -t 2012 045”,程序会自动生成YEAR 文件夹,将gg/tables 下的表文件连接到本目录下面的时段文件下,并在时段文件下生成所有处理结果文件;用循环语句批处理多天数据。
3.2.4 GAMIT 基线处理结果质量评价标准
(1)对所有测站点是否都参与计算进行检查。
(2)检查单日解标准化均方差(postfitnrms),postfitnrms 值是单时段解质量的重要指标之一,也是从历元的模糊度解算中得出的残差,表示解算出的基线值偏离其加权平均值的程度,计算公式为:
一般采用默认的加权方式进行实际解算,nrms 值如果在0.25 左右,认为是解算结果精度高,nrms 值大于0.5,说明处理结果精度差,处理过程中的周跳可能未完全修复,或者模型参数的设定有误,需要重新解算;如果nrms 小于0.5,则认为解算成功,结果有效。
(3)检查summary 文件,各基线结果是否符合gamit 的实际精度,均方根RMS 一般应该大于0 mm小于8 mm,要符合要求。
(4)坐标重复率也是坐标解算结果的重要评价指标。
(5)GNSS 基线精度评定的另一个重要指标:基线重复率,能反映基线的内部符合精度,是相对多个时段而言;这个值越小基线的内部符合精度越高,基线解算的质量越好,反之内部符合精度越低,质量越差。基线重复率的计算公式如下:
式中,n 是同一基线总观测时段数;Ci是一个时段某一基线分量或长度;是各时段的加权平均值,是该时段相应于Ci分量的方差。
(6)基线重复率计算完之后,利用基线长度及各时段分量拟合固定误差a 和比例误差b,拟合采用一元线性回归的最小二乘模型,最后检验a、b 拟合结果是否满足GNSS 测量规范规定的等级,以基线长度和基线重复率构建线性模型如下:
式中,Lm是基线的长度;Rm是基线Lm的基线重复率。将上面公式进行变换如下:
3.3 GLOBK 平差
(1)建立目录:glbf 文件和soln 文件均与gamit中的单日文件平行,执行htoglb,将h 解转换成二进制格式;用ls 生成.gdl 文件,准备好需要的先验坐标:apr 文件、globk 命令文件和glorg 命令文件,并设置好相关的命令文件,图2 是GLOBK 文件结构。

图2 GLOBK 文件结构
(2)运行glred 命令:“glred 6 glred.prt glred.log../west11-2.gdl globk_rep.cmd”;它会自动激发globk和glorg 命令,通过globk 平差得到每天的坐标.prt 文件,glorg 命令得到ITRF 坐标.org 文件。
(3)检查偏差较大的天或者测站,分析原因重新计算;检查每个测站点的坐标时间序列。
(4)也可以利用sh_glred 命令进行批处理平差。本次处理用matlab 提取了globk_comb.org 文件中的位移和中误差等信息,按照测站生成.list 文件,最后matlab 读取.list 文件中的坐标序列,绘制时间序列图,表2 是List 数据文件格式,也是后处理所需要的格式。
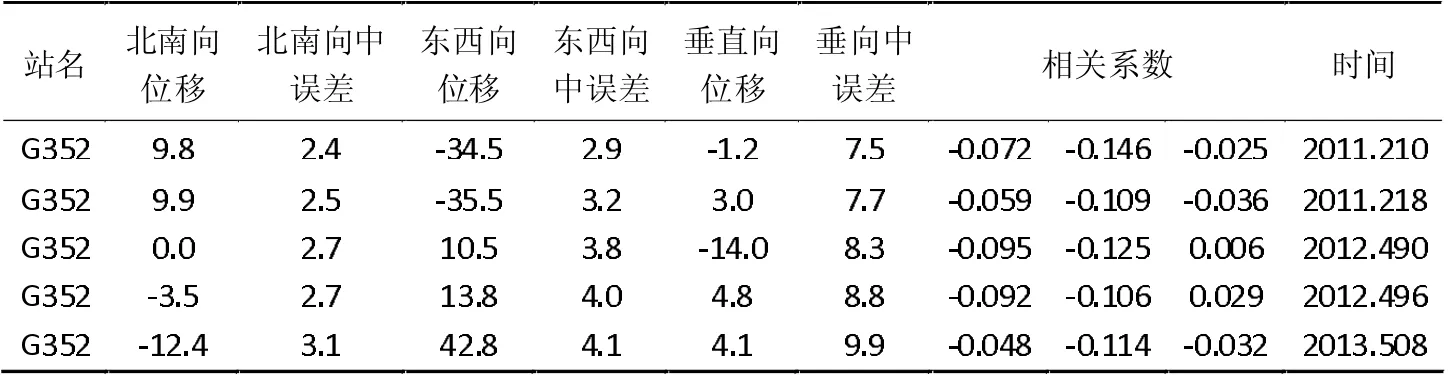
表2 G352.list 文件格式
4 结论
GAMIT/GLOBK 的处理结果为平差过的高精度坐标或位移以及中误差,通过精度分析表明:两次解算的GNSS 连续站水平方向平均点位误差在2 mm 左右,垂直分量平均点位误差在5 mm 左右;一般点位误差的限差为5~10 mm;因此,利用GAMIT/GLOBK软件能够获取汾渭断陷带及邻近地区GNSS 观测网的高精度坐标和位移时间序列,为地壳运动分析提供了基础数据。
