基于自适应模型预测控制的高速行驶工况下车辆轨迹跟踪控制
2023-09-11徐伟瑞
徐伟瑞
(重庆交通大学,重庆 400074)
1 前言
轨迹跟踪是智能车辆控制的核心技术之一。目前,智能汽车在轨迹跟踪过程中普遍存在高速工况下跟踪精度降低的问题,严重时会发生侧偏、滑移,甚至引发事故[1-2]。为提高车辆稳定性,将横摆角速度和侧偏角作为约束控制目标可以防止车辆失稳或者偏离行驶轨迹[3]。传统的模型预测控制(Model Predictive Control,MPC)算法往往采用固定的预测步长,且无法对车辆侧偏刚度进行估计,车辆在中低速工况下进行轨迹跟踪时只考虑侧向位置偏差和横摆角偏差等即可满足跟踪精度要求,而车辆在高速工况下跟踪具有一定曲率的轨迹时,由于侧偏角较大,用于中低速轨迹跟踪的控制算法往往无法取得理想效果,反而可能带来侧偏、滑移、甩尾甚至侧翻等危险[4]。
针对车辆高速行驶工况下的操纵稳定性和跟踪精度控制问题,研究人员提出了多种控制方法:王玉琼等[5]以高速行驶时车辆航向角和侧向位置偏差趋近于零为控制目标,提出后轮侧偏角自抗扰控制算法,以提高车辆的稳定性;柳亚子等[6]提出了基于轮胎侧向附着力实现前轮转角自适应的控制策略;路宏广等[7]为实现车辆横、纵向综合跟踪控制,通过引入线性变参数模型来反映纵向速度对轨迹跟踪的影响,使预测模型自适应调节其参数,从而提高车辆跟踪性能;查云飞等[8]提出基于横摆角速度稳态增益修正系数的单点预瞄模型和线性转向控制系统,以提高车辆行驶稳定性。上述文献采用不同算法对车辆轨迹跟踪问题进行研究,但均未考虑不同附着系数路面对跟踪精度和稳定性的影响以及如何应对高速工况下预测步长不足带来的风险问题。
本文基于车辆高速行驶工况,通过对轮胎侧偏刚度在线估算并实时更新控制器中的相关参数,同时采用不定步长(Non-Fixed Step,NFS)离散化方法设计多约束自适应模型预测控制(Adaptive Model Predictive Control,AMPC)算法,提高高速行驶工况下车辆在不同附着系数路面上行驶时的轨迹跟踪精度,并有效保证车辆的操纵稳定性。
2 智能车辆模型
本文通过控制车辆前轮转角实现轨迹跟踪。在不计空气动力学和车辆悬架影响的条件下,建立高速行驶时车辆三自由度动力学模型,如图1所示。其中,o-xyz为车身坐标系,O-XYZ为大地坐标系,Flf_l、Flf_r、Flr_l、Flr_r、Fcf_l、Fcf_r、Fcr_l、Fcr_r分别为车辆左前轮、右前轮、左后轮、右后轮受到的纵向力和左前轮、右前轮、左后轮、右后轮受到的侧向力,a、b、c分别为车辆质心与前、后轴的距离和半轴长度。

图1 车辆三自由度模型
车辆的动力学方程为:
式中,m为车辆质量分别为纵向加速度和纵向速度分别为横向加速度和横向速度;IZ为车辆绕Z轴的转动惯量分别为横摆角加速度和横摆角速度;Fxf_l、Fxf_r、Fxr_l、Fxr_r分别为车身坐标系下左前轮、右前轮、左后轮、右后轮受到的x方向的力;Fyf_l、Fyf_r、Fyr_l、Fyr_r分别为车身坐标系下左前轮、右前轮、左后轮、右后轮受到的y方向的力。
轮胎纵向力和侧向力分别为:
式中,Clf、Clr分别为前、后轮的纵向刚度;Ccf、Ccr分别为前、后轮的侧偏刚度;slf、slr分别为前、后轮纵向滑移率;αf、αr分别为前、后轮侧偏角。
车身坐标系与大地坐标系之间的运动学转换关系为:
前、后轮侧偏角为:
对车辆前轮转角作小角度假设,有:
忽略前轮驱动力对车辆横摆运动的影响,则有:
得到车辆动力学模型为:
车辆状态量ξ和控制量u分别为:
式中,(X,Y)为车辆在大地坐标系中的坐标。
3 自适应模型预测控制器
3.1 侧偏刚度估计
轮胎侧偏刚度对高速工况下车辆的操纵稳定性存在显著影响,作为反映车辆性能的核心参数之一,对其进行在线估算并实时反馈给车辆动力学模型,同时在控制器中进行实时更新,可以提高车辆对不同附着系数路面的适应性[9]。张志达等[10]通过横向加速度和横摆角速度对车轮横向力进行估算,将计算值与其估计值求差得到侧偏刚度影响系数,从而实现MPC 参数的自适应;Dasol Jeong 等[11]采用双线性时变(Linear Time-Varying,LTV)卡尔曼滤波器估计侧偏刚度,提高了车辆控制精度。
轮胎侧偏角对汽车附着系数、滑移率、侧偏力等均有重要影响。由式(2)所知:当轮胎侧偏角处于小角度时,轮胎侧偏刚度对侧偏力的影响较大,轮胎侧偏力与侧偏角呈线性关系;当轮胎侧偏角较大,超过安全范围时,车辆载荷会向外偏移,轮胎与地面接触区域会偏向一侧,其转向特性受到影响,车辆操纵稳定性变差,会发生失稳甚至侧偏,并加重轮胎磨损,降低轮胎使用寿命。为保障汽车操纵稳定性和安全性,本文利用侧偏角、侧偏力和侧偏刚度的关系,采用带遗忘系数的递推最小二乘法(Recursive Least Square,RLS)对轮胎侧偏刚度进行估计,并实时更新车辆动力学模型中的参数,以实现控制器中参数的自适应。
轮胎侧偏力和侧偏刚度的回归方程为:
式中,Ym(k)为输出向量,即侧偏力;φ(k)为侧偏角回归向量;Φ(k)为待估计的参数向量,即侧偏刚度;e(k)为噪声向量。
为使实际值与估计值的平方差最小,建立代价函数:
式中,λm为遗忘系数;N为对应观测数据长度为模型参数估计值。
将J极小化,即对求偏导,使其为0,在第k步可得:
设递推增益为:
经计算可得侧偏刚度估计的RLS递推公式为:
式中,E为单位矩阵。
3.2 预测模型及其约束
由式(3)、式(7)、式(8)可得车辆动力学线性状态空间方程为:
要实现高速工况下跟踪控制的实时性与稳定性,一方面需要采用较高精度的动力学模型,另一方面需要更长的预测距离来提前规避障碍危险。固定预测步长无法满足需求,本文采用不定步长的离散化方法[12]调整AMPC 的预测时域步长,增大预测距离,即将预测时域步长分为短步长Ts和长步长Tl,以保证车辆动力学线性模型离散化后的预测精度,获得MPC的理想控制效果。
常用的状态空间离散化方法有欧拉法和零阶保持法,为提高算法的控制精度和保证高稳定性,本文选取零阶保持法。在短步长阶段,即k=0,1,…,Ns时,以Ts为预测步长,将连续线性化动力学状态空间通过Z变换进行离散化,以更精确地拟合原曲线。在长步长阶段,即k=Ns+1,…,Np(其中Np为预测时域)时,以Tl为预测步长,如图2 所示,由于零阶保持法会使该预测周期范围内的控制量在较长步长内表现为常值,导致控制精度降低,如果在长步长时仍采用阶梯式的采样保持,误差会相对增大,因此在长步长阶段拟采用具有一定斜率的一阶保持法,使控制精度相对提升。

图2 不定步长离散化方法
离散后的动力学状态空间为:
式中,As=I+TsA、Al=I+TlA分别为短步长和长步长下的状态量矩阵;Bs=TsB为短步长下的控制量矩阵,;Bl1=分别为长步长下的状态量矩阵和控制量矩阵;Cd为输出矩阵;ω(k)为噪声矩阵。
输出矩阵Cd输出横摆角和横向位移:
3.3 稳定性约束
为了分析高速行驶时车辆的稳定性,可通过建立包络线约束[13]来描述车辆的操纵稳定性。如吴西涛等[14]为探索车辆前轮转角与车辆稳定性的关系,建立了车辆横摆角速度与质心侧偏角的关系曲线。由于高速行驶时基于横摆角速度-侧向速度的相平面能够很好地体现车辆的滑移、横摆和侧偏角特性,可通过控制车辆前轮主动转向来保证车辆的行驶稳定性。如图3 所示,以包络线相平面限定车辆横摆角速度和横向速度控制极限,以保证车辆在各工况下行驶的极限稳定状态。
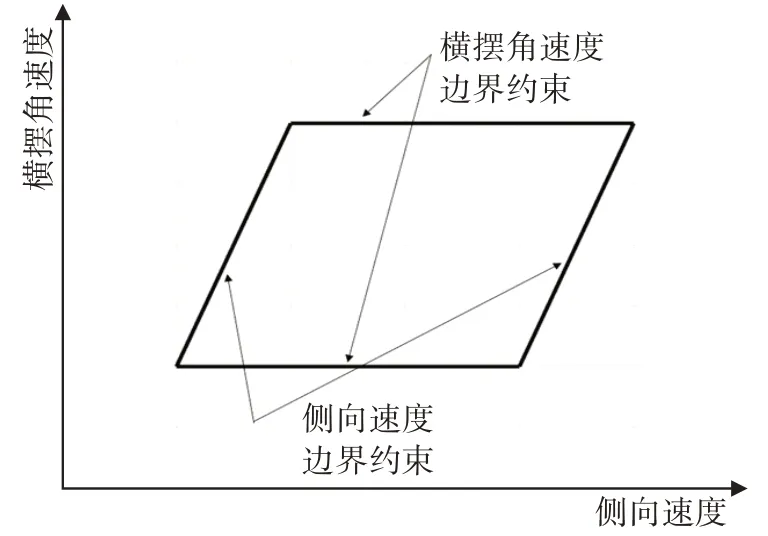
图3 稳定性包络线
为在保证操纵稳定性的前提下,实现较高精度的轨迹跟踪控制,需要车辆侧向位移误差和横摆角误差足够小,并保证车辆前轮转角变化率尽量小,令:
另一方面,如3.2 节所述,车辆后轮侧偏角的约束范围也是影响车辆稳定性的重要参数之一,可通过控制该范围来控制包络线约束。根据式(4)可得车辆后轮侧偏角αr的约束范围,横摆角速度φ̇的约束范围为:
由后轮侧偏角约束范围可得侧向速度与横摆角速度关系:
由式(19)和式(20)组成如图3所示的滑移横摆稳定性包络线。由式(19)可知,横摆角速度只与侧偏角和纵向速度有关,而与侧向速度无关,稳定性包络线中上、下界为平行于横轴的直线;由式(20)和式(21)可知,侧向速度的边界大小与横摆角速度呈正线性相关,侧向速度越小,横摆角速度越小,车辆越稳定。
3.4 目标函数
目标函数及其约束条件为:
式中,ηref为参考轨迹向量;Nc为控制时域;ρ为权重系数;ε为松弛因子;Q、R为权重矩阵;umin、umax分别为最小、最大前轮转角;umin、umax分别为最小、最大前轮转角增量分别为横向位移及最小、最大横向位移;ε为最大松弛因子。
式(22)的第1项以实际轨迹与参考轨迹之间的偏差体现轨迹跟踪精度;第2 项为系统在控制时域内对控制增量的累加,表现为对平顺性与稳定性的要求;第3项为松弛因子,其作用是避免在控制周期内目标函数无法求解的情况发生。
4 仿真分析
基于CarSim 和MATLAB/Simulink 联合仿真平台,在复杂工况下,对设计的基于NFS 并考虑滑移、前轮转角、侧偏角、横向偏差、道路边界等多约束的AMPC 方法进行仿真验证,并将所设计的控制算法与传统固定步长和侧偏刚度的控制算法进行对比。
本文主要选取高、低附着系数条件下不同车速工况,车辆跟踪的参考轨迹为长距离大角度弯道的双移线轨迹,如图4所示。

图4 参考双移线轨迹
4.1 高附着系数不同车速工况
在附着系数为0.85 的路面上,分别以70 km/h、90 km/h、120 km/h的车速进行联合仿真,仿真结果如图5~图8所示。与传统采用固定预测步长和无侧偏刚度估计的MPC算法进行控制效果对比,结果如图9所示。

图5 轨迹跟踪对比
由图5 和图6 可知,在不同速度条件下,车辆的轨迹跟踪精度均较高,侧向位置偏差保持在0.25 m以内,车辆弯道行驶时跟踪误差相对较大,直线轨迹跟踪时精度最高;由图7可知,高速车辆的前轮转角均控制在其饱和约束范围内;由图8可知,不同车速的横摆角速度-侧向速度曲线均处于滑移包络线内,车辆具有较高的操纵稳定性,且车速越低越稳定。由图9 可知,传统的MPC 算法在高速工况下进行轨迹跟踪时容易失稳,本文所设计的AMPC 算法高速工况下跟踪误差小,能有效进行轨迹跟踪。

图6 侧向位置偏差

图7 前轮转角

图8 不同车速下横摆角速度与侧向速度的关系

图9 传统MPC算法与AMPC算法跟踪结果对比
4.2 低附着系数路面不同车速工况
在附着系数为0.5 的路面上,分别以70 km/h、90 km/h、120 km/h 的车速进行联合仿真,仿真结果如图10~图13所示。
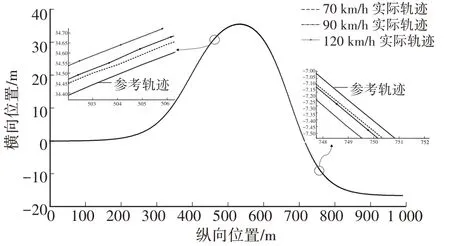
图10 轨迹跟踪对比
由图10 和图11 可知,侧偏刚度的实时估计和控制器不定步长离散化设计使得车辆适应低附着系数路面工况下的行驶,其轨迹跟踪精度也较高,侧向位置偏差保持在0.3 m 以内;由图12可知,车辆前轮转角保持在其约束范围内;由图13 可知,车辆横摆角速度和侧向速度仍处于包络线内,车辆整体仍具有较好的操纵稳定性。
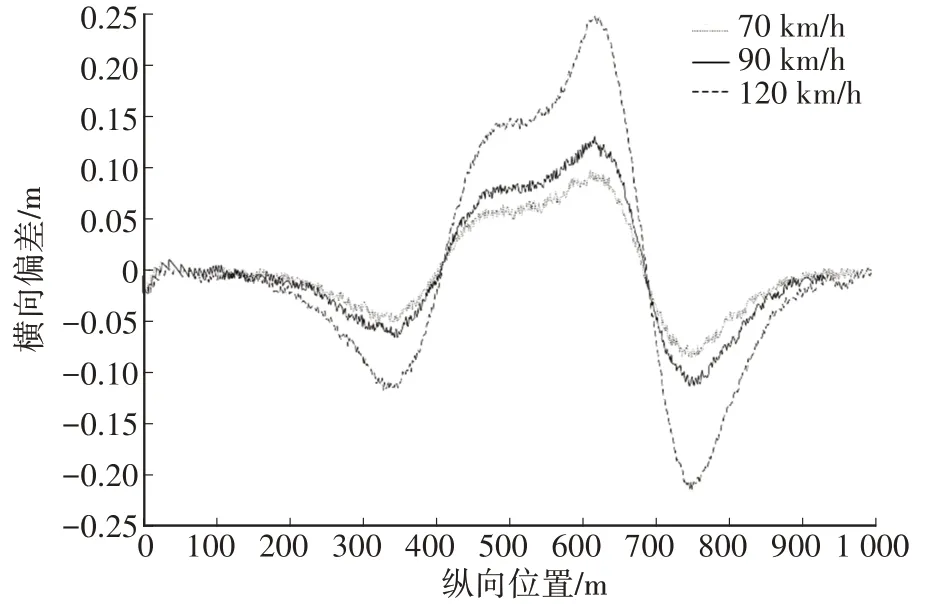
图11 侧向位置偏差
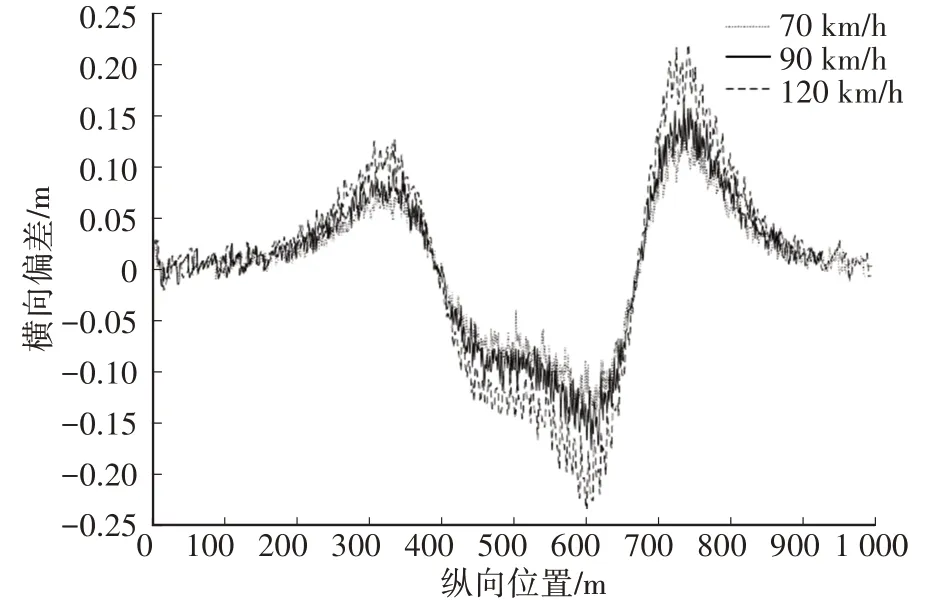
图12 前轮转角

图13 不同车速下横摆角速度与侧向速度的关系
以上仿真结果表明,本文提出的方法在高速行驶工况下车辆轨迹跟踪中可适应不同附着系数路面条件,具有较强鲁棒性,并能有效避免高速行驶时车辆的滑移失稳,保障操纵稳定性和轨迹跟踪精度。
5 结束语
针对高速工况下车辆在不同附着系数路面条件下的轨迹跟踪问题,本文对高速车辆的轮胎侧偏刚度进行在线估计并实时更新模型预测控制算法中的控制参数,实现其自适应,在离散化时改变常规条件下模型预测控制算法的预测时域固定步长为不定步长,设计成短步长和长步长来增大预测步长,同时,为保证车辆行驶时的稳定性,对高速车辆添加横摆角速度约束和侧偏角约束,从而保障了高速工况下车辆的控制精度和稳定性要求。
