基于改进型LADRC的STATCOM 抑制双馈风电场次同步振荡策略
2023-09-11刘亚锦廖雨欣刘志坚余成骏段星桅
刘亚锦,廖雨欣,刘志坚,余成骏,段星桅
(1.昆明理工大学 电力工程学院,云南 昆明 650500;2.昆明理工大学 现代农业工程学院,云南 昆明 650500)
0 引言
风电的装机容量逐年攀升,已成为可再生能源发电的主要组成部分,但我国主要的风能资源集中在中西部地区,与负荷中心整体呈现逆向分布[1]。由于电能输送距离长且规模大,常采用固定或可控串联补偿(以下简称“串补”)来提高线路传输容量[2]。由串补引发的次同步振荡(sub-synchronous oscillation,SSO)事故屡次发生:2009 年,美国德克萨斯州风电场发生了振荡频率为25 Hz 左右的SSO 事故[3];河北沽源以及吉林通榆的风电场经串补线路送出,分别在2012年和2016年发生振荡频率为6~8 Hz和5.33 Hz的SSO[4]。
工程和实验研究表明,串补与双馈感应发电机(doubly-fed induction generator,DFIG)交 互 引 发SSO 的机理是,DFIG 转子换流器快速控制与串补相互作用,故又被称为次同步控制相互作用(sub-synchronous control interaction,SSCI)[5]。由于风电出力的随机性和时变性,振荡频率也呈现时变的特点,SSCI发散性更强,对电网稳定性的影响也更加恶劣,故亟需开展SSCI特征分析并探索相关的抑制方法。
文献[6-8]分别基于阻抗法、特征值法和复转矩系数法解释了SSCI 发生机理,SSCI 主要影响因素包括串补度、风速、变流器控制参数等。目前SSCI 抑制措施主要分为3 类。①采取切除串补、切机等被动措施来抑制风电场的SSO[9],但会减少风电场出力,且切除串补会降低线路输送能力和稳定性。②对DFIG 控制器进行优化或附加阻尼控制。文献[10]提出反馈线性化滑模控制替换现有的比例积分(proportional integral,PI)控制器,改善系统鲁棒性,抑制SSO。在DFIG转子侧变流器(rotor side converter,RSC)、网侧变流器(grid side converter,GSC)中附加次同步阻尼控制(sub-synchronous damping control,SSDC)[11-12]。工 程 实 现 方 面,需 要 逐 台 对DFIG进行现场升级改造,工程量大。③利用柔性交流输电系统(flexible AC transmission system,FACTS)装置可实现SSCI 集中抑制。大型风电场会安装FACTS 进行无功补偿,以改善公共耦合点(point of common coupling,PCC)处电压,防止电压跌落对DFIG 转子变流器的损坏,提升系统输电能力。酒泉风电基地装机容量大,主流无功补偿装置在此均有装设,哈密的国华风电场在PCC 处装设了6 套容量为 ± 45 Mvar 的静止同步补偿器(static synchronous compensator,STATCOM)[13]。在FACTS 中附加SSDC来抑制SSCI,不仅可以解决以上方法存在的问题,而且在经济性上具有突出优势[14]。
基于FACTS 附加SSDC 解决SSCI 问题,文献[15-17]分别以DFIG 转子角频率偏差、线路电流以及电压作为输入信号,依靠带通滤波器提取振荡模态分量,经过比例移相环节,向系统注入次同步阻尼电流。振荡频率需要与滤波器中心频率相匹配,比例移相环节参数配置合理,才能获得满意的抑制效果,该类方法无法适应时变的振荡环境。自抗扰控制(active disturbance rejection control,ADRC)不依赖系统精确数学模型,在非线性、强耦合、时变系统中具有较强的鲁棒性。文献[18]在STATCOM 中附加ADRC 阻尼控制器,克服了以滤波器为核心的抑制策略无法适应各种工况的问题,但ADRC为非线性形式,原理复杂且参数众多,工程运用困难。文献[19]提出线性自抗扰控制(linear active disturbance rejection control,LADRC),将控制参数减少到2 个,且控制性能未受影响,在工程中得到广泛应用。
以上研究有以下局限性:①在LADRC 的设计中,通常忽略延时因素,导致观测器输入量之间在时间轴上不匹配,降低控制器的跟踪精度并影响控制的可靠性;②STATCOM 通常采用PI 控制器,但当系统发生SSO 时无法适应非线性、强耦合、时变的环境,同时积分器的计算延时,会造成输出相位偏移;③目前基于LADRC 的阻尼控制仅在原有控制中增加一个LADRC 模块,鲜有文献提出用全LADRC 的控制系统对振荡进行抑制。
针对上述问题,本文提出了基于改进型LADRC的STATCOM 来抑制双馈风电场SSCI。首先,改进了LADRC 以消除延时带来的不良影响。随后,设计了全改进型LADRC 的STATCOM 控制系统,对各控制模块进行建模,进一步得到STATCOM 整体导纳模型,从阻抗角度解释了STATCOM 抑制SSCI 的机理。最后,在时域模型中对比了改进型LADRC、传统LADRC 和PI 控制器对SSCI 的抑制效果,验证了所提方法的有效性。
1 含STATCOM的双馈风电场-串补外送系统
1.1 系统整体结构
本文建立了在PCC 处利用STATCOM 提供电压支撑的双馈风电场经串补线路送出的等效模型,如图1 所示。在系统建模中,假定风电场由N台完全相同的1.5 MW DFIG 并联组成,风电经风电汇集站T1和升压站T2升压后,进入220 kV交流线路,经升压站T3第三次升压后由500 kV 串补线路并入无穷大电网。图中:RL1、LL1分别为220 kV 交流线路的等效电阻和电感;RL2、LL2、CSC分别为500 kV 线路等效电阻、电感和串补电容;up为STATCOM 与系统连接的PCC 电压,STATCOM 并联在双馈风电场的集中PCC处;Δωr为转子角频率偏差量。

图1 含STATCOM的双馈风电场经串补的并网系统Fig.1 Grid-connected system of doubly-fed wind farms with STATCOM through series compensation
1.2 STATCOM数学模型
STATCOM 拓扑结构如图2 所示。图中:Lc和Rc分别为STATCOM 与电网之间的连接电感和电阻;C为直流侧电容值;udc为直流侧电容电压;upa、upb、upc为STATCOM 与系统连接的PCC 处三相电压;ica、icb、icc为STATCOM 注入系统的三相电流;uca、ucb、ucc为STATCOM输出的三相电压。

图2 STATCOM拓扑结构Fig.2 Topology structure of STATCOM
在dq旋转坐标系下,STATCOM 主电路的交流侧和直流侧数学模型可分别表示为:
式中:upd、upq分别为PCC 处电压up的d、q轴分量;ucd、ucq分别为STATCOM 输出电压uc的d、q轴分量;icd、icq分别为STATCOM 向系统注入电流ic的d、q轴分量;ω0为系统额定角频率。
2 基于改进型LADRC 的STATCOM 抑制双馈风电场SSCI控制结构
传统STATCOM可支撑风电场PCC处电压,但不能为系统提供正阻尼并抑制SSCI,故在STATCOM中附加SSDC,为系统提供正阻尼,STATCOM 输出电压不仅包含工频电压,还将叠加次同步分量。STATCOM中电压电流双环控制采用PI 控制器,但PI 控制器中的积分器会产生积分延时,使控制系统整体速动性减弱,并造成输出电压相位偏移,影响抑制效果甚至可能对振荡产生助增作用。次同步信号有非线性、时变的特点,PI 控制器参数适应性差、静态误差较大,无法适应SSCI 环境。文献[20]在三相电压型脉宽调制(pulse width modulation,PWM)整流器中,将全LADRC 系统与全PI 控制系统进行对比分析,全LADRC 系统动态跟踪性能、抗干扰能力和鲁棒性更强。故本文将STATCOM 中电压电流双环控制中的PI 控制器用改进型LADRC 替代,并基于改进型LADRC 为STATCOM 设计附加阻尼控制器,构建改进型LADRC 的控制系统,基于改进型LADRC 的STATCOM控制模型见图3。

图3 基于改进型LADRC的STATCOM控制模型Fig.3 STATCOM control model based on improved LADRC

3 具有延时补偿的LADRC设计
3.1 LADRC传统控制结构
LADRC 结构由跟踪微分器(tracking differentiator,TD)、线性扩张状态观测器(linear extended state observer,LESO)、线性误差反馈(linear state error feedback,LSEF)三部分组成。LESO 输出系统状态变量估计值z1、z2、…、zn和总扰动估计值zn+1,LSEF基于状态误差e1、e2、…、en通过合适的线性组合计算出信号u0。设n阶被控对象如下:
式中:f为总扰动,包括内部扰动和外部扰动;u为LADRC 输出控制量;b0为与受控对象相关的参数;y为被控对象实际输出量。
构造LESO如下:
式中:z=[z1z2…zn zn+1]T为LESO 对状态变量的观测值;β=[β1β2…βn βn+1]T为LESO 增益。当β中元素值配置得当时,观测值将会接近真实值,即z1→y,z2→ẏ,…,zn+1→f,故LESO 可以估计总扰动。通过LSEF环节,最终LADRC的输出控制量u为:
式中:kp、kd、…、kd(n-2)为LSEF 控制增益;v为目标参考值。
LADRC 参数可由极点配置法得到,将LESO 和LSEF 两部分的参数简化为2 个带宽,即LESO 的观测带宽ωg和LSEF 的控制带宽ωc。一阶LADRC 的LESO特征方程λ1(s)和LSEF特征方程γ1(s)分别为:
式中:ωg,1、ωc,1分别为一阶LADRC的LESO观测带宽、LSEF 的控制带宽;β1,1、β2,1为一阶LADRC 的LESO增益;kp,1为一阶LADRC的LSEF控制增益。由式(6)可得一阶LADRC的控制参数为:
类似地,二阶LADRC的控制参数为:
式中:ωg,2、ωc,2分别为二阶LADRC 的LESO 观测带宽、LSEF的控制器带宽;β1,2、β2,2、β3,2为二阶LADRC的LESO 增益;kp,2、kd,2为二阶LADRC 的LSEF 控制增益。
3.2 考虑延时的改进型LADRC
STATCOM 作为被控对象,控制输入信号u到实际输出信号y过程中,存在PWM延时、采样和计算延时等,即y(t+Td)与u(t)之间存在时间误差Td。将Δωr引入STATCOM控制中,由于风电场与STATCOM之间存在一定的电气距离,信号传输延时也需要考虑。LESO的2个输入信号y和u时间轴上的不匹配,将会影响LESO对干扰和系统状态估计的准确性。
考虑延时的改进型LADRC 结构如图4 所示。在信号u输入LESO 之前加入延时模块,使信号y和u在时间上达到同步,提高LADRC 控制器在时滞系统中的控制精度。
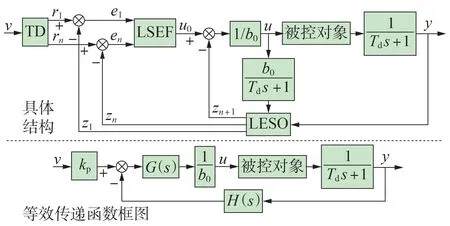
图4 考虑延时的改进型LADRC结构Fig.4 Improved LADRC structure considering time delay
联立式(4)、(5)、(7)、(8)可推导出改进型LADRC 输出控制信号u的一阶、二阶LADRC 传递函数分别如式(9)、(10)所示。
4 STATCOM控制器设计
附加阻尼控制器LADRC5采用二阶形式,Δωr从双馈风电场引入STATCOM 过程中需考虑采样延时Ts以及信号传输延时Tc,将延时近似等效为一阶惯性环节,即1/[(Ts+Tc)s+1],在uer引入LESO 之前加延时环节1/[(Ts+Tc)s+1],控制器具体表达式见附录A式(A1)。
由式(1)可知,STATCOM 交流侧数学模型为一阶系统,故电流内环控制器LADRC2和LADRC4均采用一阶形式。dq轴电流内环控制器设计原理和参数均相同,以d轴为例,电流内环控制结构见附录A图A1,控制器设计过程见附录A式(A2)、(A3)。
d轴电压外环控制器LADRC1对应电压udc平衡,由式(2)可知STATCOM 直流侧数学模型为一阶系统,故LADRC1采用一阶形式,控制结构见附录A 图A2,具体表达式见附录A 式(A4)、(A5)。类似地,q轴电压外环LADRC3设计过程见附录A式(A6)。
PLL 为同步系统提供跟踪相位θpll,发生SSCI 时PLL 输入电压中含有大量谐波,会使输出相位的误差增大。用一阶LADRC 替换PLL 中原有的PI 控制器(后文简写为“PLL_LADRC”),LADRC 会对谐波量进行估计并补偿,消除系统中的谐波影响,增加同步系统的跟踪精确度,PLL_LADRC 控制原理见附录A 图A3。PLL_LADRC 设计过程见附录A 式(A7)—(A11)。
5 STATCOM的SSCI抑制机理
5.1 STATCOM抑制SSCI阻抗机理
含STATCOM 双馈风电场经串补的并网系统在次同步频率fer下等效阻抗模型如图5 所示。图中:Rr、RRSC分别为风力发电机转子绕组和RSC 的等效电阻;Rs为定子绕组与风电场出口升压变的总电阻;Lr、Ls、Lm分别为转子、定子的漏感以及互感,由于Lm≪Lr、Lm≪Ls,常忽略含Lm的线路;Δur为RSC 在次同步扰动下输出的扰动电压;sr为次同步频率下转子转差率,有sr=(ωer-ωr)/ωer,ωer为次同步角频率,ωr为转子角频率;ZG为DFIG 风电场等效阻抗;ZL为输电网络等效阻抗;Rm、Xm分别为STATCOM 等效电阻和电抗。

图5 含STATCOM的双馈风电场经串补的输电阻抗模型Fig.5 Transmission impedance model of doubly-fed wind farm with STATCOM through series compensation
输电网络中线路与变压器的等效阻抗电路由电阻RL、电感LL及串补电容CSC组成。未加入STATCOM时系统在次同步频率下的等效阻抗Zeq=Req+jXeq可表示为:
式中:RG、XG分别为DFIG 风电场等效电阻和电抗。一般ωer<ωr,则sr<0,此时转子呈现负电阻特性,即(Rr+RRSC)/(Nsr)<0;当转子的负电阻特性使系统整体电阻为负时,Req<0;此时若系统受到扰动,则由于系统整体呈现负阻尼,将引发持续发散振荡,进而造成严重SSCI事故。
STATCOM 附加SSDC可以增加系统在次同步频率下的正阻抗,如图5 所示,STATCOM 等效为并联可变阻抗Zm=Rm+jXm,投入STATCOM 后系统整体等效电阻R′eq为:

5.2 STATCOM等效建模
由附录A 式(A3)、(A5)、(A6)可得,d、q轴电压外环和电流内环传递函数分别为:
式 中:b0,ud、b0,uq和kp,ud、kp,uq和G1,ud(s)、G1,uq(s)以 及H1,ud(s)、H1,uq(s)分别为d、q轴电压外环LADRC 的内部 控 制 参 数b0,u和 控 制 增 益kp,u以 及 传 递 函 数 分 量G1,u(s)和H1,u(s)的表达形式;b0,id、b0,iq和kp,id、kp,iq和G1,id(s)、G1,iq(s)以及H1,id(s)、H1,iq(s)分别为d、q轴电流内环LADRC的内部控制参数b0,i、控制增益kp,i、传递函数分量G1,i(s)和H1,i(s)的表达形式。
由式(14)可推导出STATCOM 控制系统的小信号模型,如式(15)所示。
式中:Δup=(upd0Δupd+upq0Δupq)/up0,将其改写为矩阵形式F5,矩阵F1—F5、Fdelay详细表达式如附录A 式(A12)所示,变量下标0 表示对应变量的稳态值,变量前方Δ表示对应变量的小信号分量。
对式(1)、(2)进行拉氏变换,建立小信号模型如下:

6 SSCI抑制效果仿真验证
利用MATLAB/Simulink 搭建了图1 所示的含STATCOM 的双馈风电场经串补线路并网的等值模型,来验证上述SSCI抑制策略的有效性。
6.1 控制参数对STATCOM等效阻抗的影响规律
STATCOM等效为次同步频率下电阻值为正的阻抗,并联在双馈风电场PCC处,将系统整体阻抗抬升至正值。STATCOM 等效阻抗与控制参数密切相关,依据上述推导得到全改进型LADRC 下的STATCOM小信号导纳矩阵,进一步研究参数对STATCOM 等效阻抗的影响规律。增大或减小附加阻尼控制器、电压外环和电流内环LADRC 参数,参数变化对STATCOM 等效阻抗的影响规律见附录B 图B1。由图可知:附加阻尼控制器参数的变化对阻抗的影响最为显著,电压外环控制参数对阻抗影响不大;电流内环控制器LADRC 中控制带宽对阻抗的影响大于观测带宽。
6.2 全改进型LADRC 与部分使用LADRC、全PI 控制器的STATCOM系统等效阻抗对比
基于全改进型LADRC、全PI 控制器、部分使用改进型LADRC(附加阻尼控制+改进型LADRC、电压电流双环控制+改进型LADRC)抑制策略,等效阻抗频率特性曲线对比如图6所示。
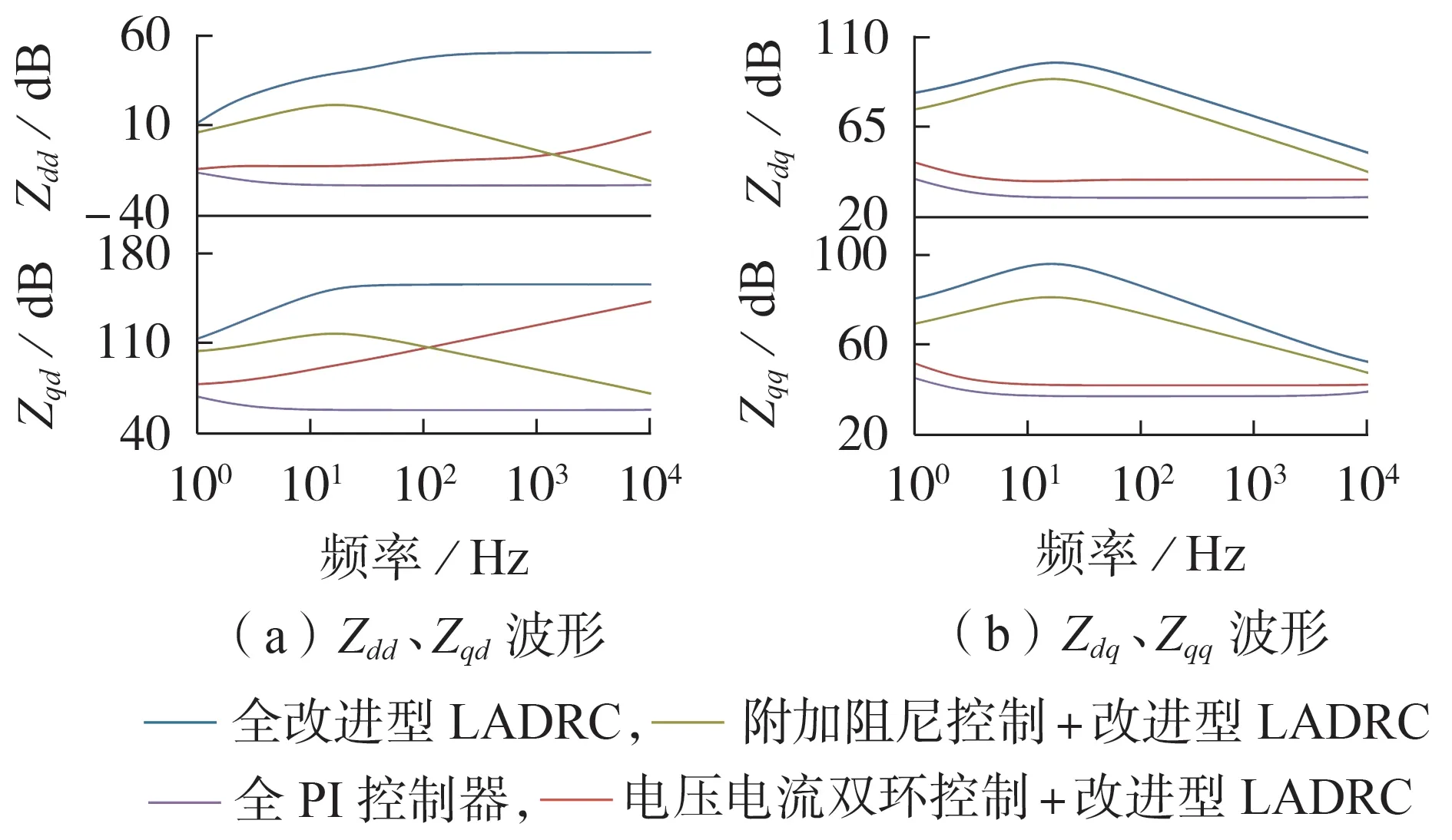
图6 不同抑制策略等效阻抗对比Fig.6 Comparison of equivalent impedance among different suppression strategies
由图6 可知:相较于其他抑制策略,采用基于全改进型LADRC 的抑制策略时阻抗分量幅值Zdd、Zdq、Zqd、Zqq均较高;2种部分使用改进型LADRC 的抑制策略虽然在一定程度上可以增大STATCOM 等效阻抗,但是幅值增量没有全改进型LADRC 抑制策略明显。因此全改进型LADRC 系统的稳定裕度和鲁棒性更强。
6.3 抑制策略效果验证
分别对比基于PI控制器、传统LADRC以及改进型LADRC 的SSCI抑制策略的抑制效果。DFIG 处于额定运行状态,风速为额定风速15 m/s,在6 s时投入串补电容,3 种抑制策略下DFIG 输出响应的仿真结果如图7、8所示。

图7 不同抑制策略DFIG输出有功、无功响应曲线Fig.7 Output active and reactive power response curves of DFIG under different suppression strategies
由图7 可知,当输电线路的串补度突变为40 %时,DFIG输出有功功率P、无功功率Q波形将会在此扰动下发生持续振荡且振荡没有衰减,波形中出现大量次同步分量。基于PI控制器、传统LADRC和改进型LADRC 抑制策略均可以使次同步分量逐渐衰减。但在改进型LADRC 抑制策略作用下,相比传统LADRC 和PI 控制器,DFIG 输出有功功率和无功功率振荡幅度更小,收敛速度更快。由图8 可知,采用改进型LADRC 抑制策略后,定子电流总谐波畸变率(total harmonic distortion,THD)由PI 控制下的1.17 % 和传统LADRC 下的0.62 %,下降到0.39 %。由此表明,基于改进型LADRC 的抑制策略可以有效抑制系统SSCI,相较于PI 控制和传统LADRC,动态追踪速度更快,有更强的暂态和稳态响应能力。

图8 不同抑制策略下定子电流THDFig.8 THD of stator current under different suppression strategies
6.4 鲁棒性测试
6.4.1 串补度变化
系统在稳定运行状态下,6 s 时在线路中投放串补度为40 %、60 % 和80 % 的串补电容,保持控制器参数不变,得到在不同串补度下基于改进型LADRC、传统LADRC、PI控制器的抑制策略对SSCI抑制能力的对比结果,如图9所示。

图9 不同串补度下DFIG输出有功功率响应曲线Fig.9 Output active power response curves of DFIG under different series compensation
由图9 可知:串补度越大,系统的振荡幅度也越大,抑制策略对振荡的抑制速度也会有一定程度的减慢;各抑制策略在不同串补度下,使DFIG 输出功率振荡逐渐趋于收敛,但在PI 控制器下,DFIG 输出功率在9.5 s 仍存在小幅度振荡,且随着串补度的增加振荡抑制效果也减弱。在保持参数不变的条件下,PI控制器在一段时间内使DFIG输出的有功功率降低,且串补度越大,功率降低越明显。传统LADRC在不同串补度下使振荡逐渐趋于收敛且不会影响DFIG 的输出功率,但在振荡逐渐收敛进入稳态的一段时间内,DFIG 输出的有功功率仍存在微小振荡,在振荡收敛快速性和扰动估计精准度方面都逊色于改进型LADRC。在实际工程中,我国高压输电串补度集中在35 %~45 %,基本不能达到80 %。因此改进型LADRC 可以在参数不变的条件下对不同串补度引发的SSCI进行有效抑制。
6.4.2 风速变化
由于风电场出力具有随机性和时变性,在不同风速下考虑基于改进型LADRC、PI 控制器的抑制策略对DFIG 的SSCI 抑制效果。分别选取风速为15、12、9 m/s,使DFIG 稳定运行一段时间,在6 s 投入补偿度为40 % 的串补电容,对比分析2 种抑制策略在不同风速下的SSCI抑制效果,如附录B图B2所示。由图可知:在不同风速下,未投入抑制措施时,双馈风电场经串补输电系统会发生持续性的振荡;改进型LADRC 不改变控制参数,可以在不同风速下为系统提供正阻尼,DFIG 输出有功功率振荡都可以在大约0.5 s 内快速收敛并趋于稳定;基于PI 控制器的抑制策略不改变控制参数,风速越低则抑制效果越弱,当风速为9 m/s时抑制策略失效,不能使振荡收敛。
7 结论
针对双馈风电场由串补线路引发的SSCI 问题,本文提出了基于改进型LADRC的STATCOM 附加阻尼控制,并对系统进行了阻抗建模和仿真分析,所得结论如下:
1)基于全LADRC 的STATCOM 控制系统,相比全PI 控制可以提高系统的追踪速度、对扰动的观测精度以及抗干扰能力,实现STATCOM 对SSCI 的快速有效抑制;
2)STATCOM 附加阻尼控制系统的阻抗建模中,SSDC 在电路中等效为受控电压源向系统注入次同步抑制电流,实现系统阻抗重塑,增加了系统在次同步频率下的正阻尼;
3)输电线路串补度、风速等因素都会影响SSCI的特性,也会对上述抑制策略的鲁棒性和抗干扰能力提出挑战。
附录见本刊网络版(http://www.epae.cn)。
