智能护理机器人在居所中的研究与应用
2023-09-11王波梁鲁阳孔庆莹
王波,梁鲁阳,孔庆莹
(1.广东省机械技师学院,广东广州,510450;2.佛山市顺德区新大通工艺电器有限公司,广东佛山,528000)
0 引言
随着我国老龄化社会的到来,老人失能化趋势明显[1],养老问题日益严峻,“南粤家政”工程的提出恰逢其时。据统计,我国现有老年人口1.32 亿,并每年以3.2%的速度增长;80 岁以上的高龄老人每年以5%的速度增长;全国卧床、生活不能自理的病人和老人2700 万,半身不遂病人70万人,老年痴呆病人85 万[2,3]。老龄化问题已成为事关国计民生的大事情,很多家庭的养老负担也越来越重。
本文提出研究和开发一种智能护理机器人,并在居所中应用和推广。在具备完善的护理自动化、智能化功能基础上,以能护理机器人为中心,通过人工智能、物联网、健康大数据分析等搭建线下、线上智能监护养老服务平台。本系统的应用和推广,将很大程度上减轻社会养老的压力,为“南粤家政”工程的推进提供有力支撑。同时,本文重点研究了护理机器人在居所中的移动和导航方法,通过引入UWB 技术,再结合编码器和电子罗盘,最终实现护理机器人在室内定位和自主导航。
1 智能监护养老服务平台的组成
本文提出的智能监护养老服务平台,由拥有“床-椅”姿态变换、人体生理参数监控系统、护理与按摩的多功能智能护理床、智能护理机器人为载体,运用物联网技术将设备端的个人信息、设备运行状态、实时健康数据、视频数据上传至智能云平台。云平台对患者状态进行分析并反馈给客户端,客户端通过接口访问云平台,可以实现多种终端的实时监控,同时用户也可以采用多种模式远程控制护理床姿态,个性化定制功能,最终构建一个以智能化、自主化的管理平台。具体的护理系统架构如图1 所示。

图1 智能监护养老服务平台架构
■1.1 智能护理机器人系统设备参数
智能护理机器人是整个能监护养老服务平台的核心,本文将重点从智能护理机器人的开发与应用做全面的分析和研究。智能护理机器人具备两个可实现室内移动的驱动轮,并且拥有“床-椅”两种姿态,实物如图2 所示。
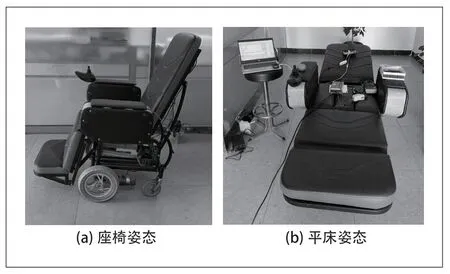
图2 智能护理机器人“床-椅”两种姿态实物图
智能护理机器人,具备的关键的功能及其参数如表1所示。
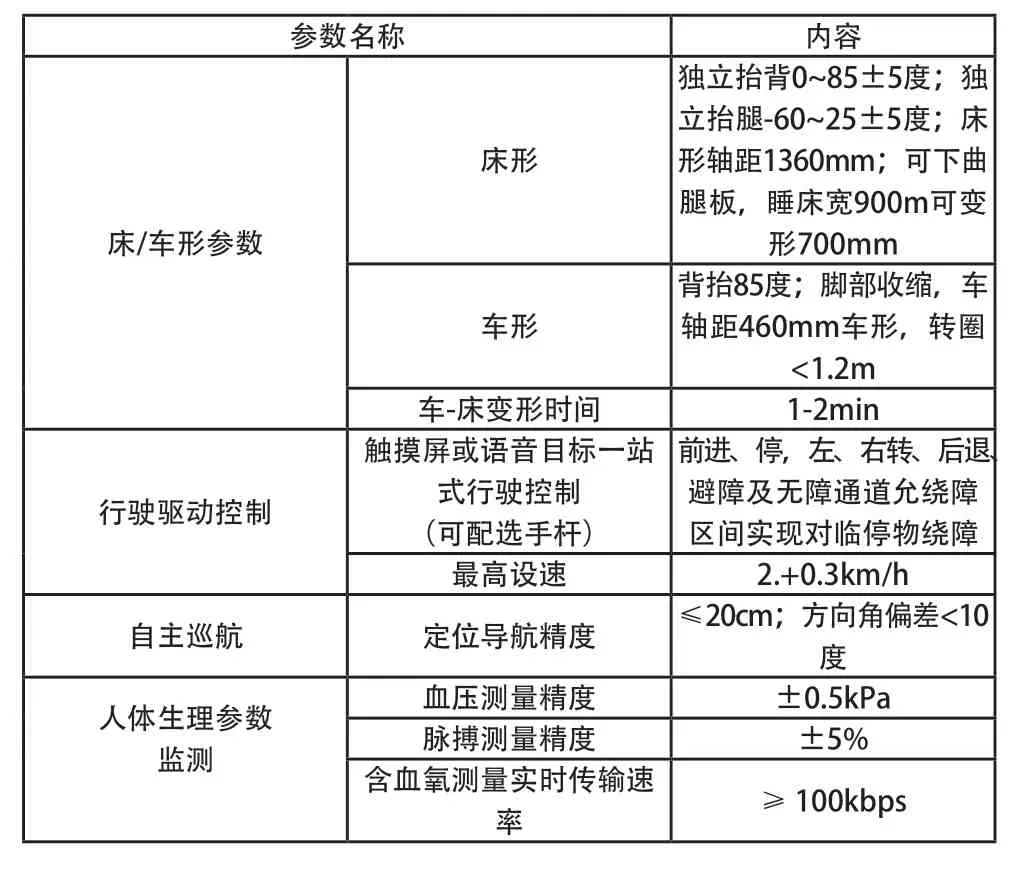
表1 智能护理机器人关键功能及参数
■1.2 智能护理机器人系统硬件组成
智能护理机器人主要包括:①2 个驱动轮,2 个万向轮,驱动轮转动力矩由两台直流电机提供;②3 个推杆电机,实现“床-椅”两种姿态的变换;③1 套主控制器,用于控制驱动轮的转动和“床-椅”两种姿态的变换,并且负责定位和移动速度、角度等数据的接收和处理,是智能护理机器人的核心。
主控制器设计和安装接线如图3 所示。

图3 智能护理机器人主控制器及其安装
2 运动控制系统设计
■2.1 运动学模型
本文设计的智能护理机器人采用两轮差速的驱动方式,该驱动方式下,位姿计算是机器人运动控制过程中的关键[4]。位姿是指机器人在绝对坐标系中的位置和姿态,在此定义:(1)左右两轮的轴距为D;(2)中心点为Q(x,y);(3)两轮连线的中垂线为l。那么,位姿可用P=[x,y,θ]T来表示,其中,x和y分别表示中心点Q相对于绝对坐标系Y 轴和X轴的距离,θ表示中垂线l与Y轴的夹角。智能护理机器人的运动学模型如图4 所示。
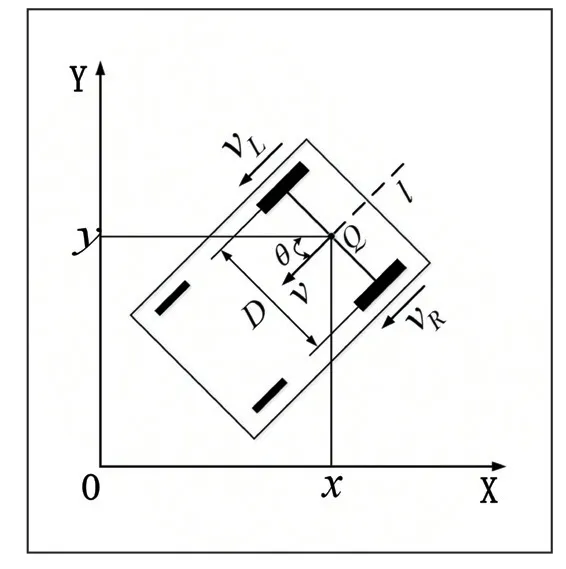
图4 智能护理机器人运动学模型
在图4 中,假设t时刻左右两轮的线速度分别为vL和vR,则有:
其中,v为中心点Q的线速度,ω为中心点Q的角速度,对位姿进行离散化之后得:
假设机器人的初始姿态为P0=[x0,y0,θ0]T,则任意时刻的姿态为:
■2.2 UWB 定位系统
自主巡航是智能护理机器人关键技术,基于超宽带技术(Ultra Wide Band,UWB)的室内定位实现自主巡航。UWB 是无线电通信技术的一种新方向,被认为是当今最具发展的通信技术之一[5]。关于室内定位导航问题, GPS 导航面临信号弱和定位精度不高的问题[6],视觉定位容易受居所光线和复杂环境影响,RFID 标签和二维码标签布局的维护难等问题,UWB 定位技术可以很大程度克服上述的不足,并且安装方便,精度也较为理想。
根据上述的运动学模型,当智能护理机器人移动时,惯性导航提供的位置数据存在累计误差,且在居所复杂的环境下难以提供实时的位置数据,惯性导航结合UWB 定位系统,则可以很好解决实时定位和重复定位的问题。
2.2.1 UWB 定位系统设计
该系统主要包括1 个PC 基站、4 个定位基站、1 个机载UWB 标签以及上位机系统等。其主要工作是测量机载标签到A、B、C、D 四个定位基站的距离,标签将相关数据返回给PC 基站。PC 基站与上位机连接,上位机收到PC基站数据后,计算得到三维定位数据,再将定位数据下发至运动控制系统。UWB 定位系统框架如图5 所示。

图5 智能护理机器人UWB 定位系统框架
2.2.2 UWB 定位算法的实现
UWB 定位算法主要使用到:(1)SDS-TWR 测距算法,获取标签到基站的距离;(2)三边定位法,计算出唯一的交点作为标签的位置坐标。
(1)SDS-TWR 测距算法
SDS-TWR 测距算法由于对非对称双边双向测距算法进行了优化,对时延导致的误差可以起到较好的消除作用。SDS-TWR 测距算法示意图如图6 所示。

图6 SDS-TWR 测距算法示意图
其中,将模块A 和模块B 之间的信号传播时间记为TOF,模块A 接收到模块B 信号后等待时间记为TreplyA,模块B 接收到模块A 信号后等待时间记为TreplyB。则可以得到如下式子:
则两节点间距离为:
其中,c为光速,D为两点间测距距离。
(2)三边定位算法
如图7 所示,通过SDS-TWR 测距算法,机载UWB 标签轮流与A、B、C、D 四个定位基站进行测距,得到标签到四个定位基站的距离:d1,d2,d3,d4;再根据三边定位法计算得到标签的实际二维坐标。

图7 三边定位法原理
假设4 个定位基站的位置坐标为:A(x1,y1),B(x2,y2),C(x3,y3),D(x4,y4),采用TOF 方式进行测距,并分别记标签与定位基站的距离为:d1,d2,d3,d4,整合后得到如下的方程组:
在(9)式中,任意一个方程与最后一个方程进行减运算,转换成矩阵的形式,结果如下:
最终得到解为:
最终的X即为二维平面定位数据,但是此时的定位数据波动较大,可以通过引入卡尔曼滤波的方法对定位数据进行优化处理。
■2.3 卡尔曼滤波算法
系统的控制输入和测量数据作为卡尔曼滤波估计状态的关键,用TOF 测距算法得到的距离值与距离变化率可以作为系统状态向量[7],得到卡尔曼滤波的测距模型为:
卡尔曼滤波的增益矩阵如下:
上式中 ,k和k-1 分别表示当前状态和前一状态,X为先验估计的k时刻状态矩阵,Zk为实际观察量,Ak-1为状态变换矩阵,Hk为实际观测矩阵,Wk-1和kV为噪声协方差矩阵。Kk为卡尔曼增益,Pk|k-1预测协方差矩阵。当Pk|k-1增大时,Kk增大,Vk增大,随之Kk相应减小。
■2.4 控制系统框架设计
智能护理机器人的运动控制模式为三闭环串级控制系统,由位置控制环、速度控制环和姿态控制环构成。如图8所示。

图8 智能护理机器人运动控制系统框架
其中,编码器用于实时采样机器人左右两轮的线速度vL和vR,电子罗盘用于实时采样机器人两轮连线的中垂线为l的方向,经过卡尔曼滤波器解算得到机器人两轮中心点Q的线速度v和角速度ω。
3 实验及其分析
■3.1 实验平台
本实验基于两轮差动智能护理机器人实体平台展开实验,基于惯性导航和UWB 定位技术实现机器人在居所内的自主巡航。首先,是以1 个PC 基站、4 个定位基站、1 个机载标签搭建了二维定位系统,并在上述搭建的平台进行了相关实验。
■3.2 实验效果
在居所内指定某个坐标点为目标位置,并记为:O( 0,0)。智能护理机器人从不同的初始位置出发,运行至目标位置。
UWB 定位技术基于三边定位算法,该直接解算的定位数据误差较大,引入了卡尔曼滤波,经过多次反复实验,智能机器人运行至目标位置O( 0,0),其误差绝对值基本上保持在10cm 范围,可以明显看到卡尔曼滤波很大程度上提高了定位的精度,如图9 所示。

图9 滤波前后定位误差
4 结论
本文提出的智能养老护理机器人平台,在确保安全情况下,实现了通过多种途径(语音、手机、手动等)进行操作,大大提高了护理人员的工作效率,减少工作强度;根据卧床老人的舒适度大数据分析结果,利用机器人多轴控制技术实现了智能床不同体位变换和个性化舒适度设置;基于惯性导航和UWB 定位技术的护理机器人,可以实现在居所内的自主巡航。本文的研究,充分发挥了“互联网+”及人工智能家居产品的优势,也从一定程度上助推了“南粤家政”工程的发展,进而缓解日益增加的社会养老压力,使得长期卧床的病人以及需要护理的人员居家护理的条件将得到巨大的改变,具有前瞻布局意义。
