模块化水下仿生蛇形搜救装置研究
2023-09-11马文科高强赵博文孙斌胡歆遥赵俊哲
马文科,高强,赵博文,孙斌,胡歆遥,赵俊哲
(1.沈阳工程学院,辽宁沈阳,110000;2.中建东方装饰有限公司,辽宁沈阳,110000)
0 引言
随着海上运输、海洋资源开发活动的日益增多,海上事故发生率也居高不下。因此,建立完备的海上搜救装备体系尤为重要,而目前的水下机器人ROV 及AUV 分别暴露出运动能力弱和环境适应性差的问题,均只能在特定的场景中进行应用,并不能满足实际应用的需要。而仿蛇形水下搜救机器人同时兼顾了地形兼容性及运动灵活性,在沉船体内部、礁石地带等复杂环境中,优势更为明显。除此之外,仿蛇形机器人得益于独特的仿生结构和灵活性,在水产养殖、输油管道及水下工作平台的检修工作中以及海洋探索等领域也具有巨大的应用前景。综上所述,针对基于模块化技术的新型仿生蛇形机器人的研究将会在社会生产工作中为人们提供更大的便利。
1 主体结构设计
■1.1 驱动结构设计
考虑到水下搜救机器人在实际应用场景中针对工作效率的需求,计划将蛇头及蛇尾两端均设计为主驱动装置,即形成双动力模式。采用“横纵双向”螺旋桨推进结构为装置提供动力(装置驱动结构示意如图1 所示),分布于蛇头结构两侧的横向水推器可实现横向驱动及差速转向,而安装于蛇头结构内部的纵向水推器用于实现装置整体的“下沉-上浮”运动。这样的双驱动模式既可以保证装置在有限的硬件条件下维持高效率工作,同时也可实现装置在一端驱动结构受损的情况下,仍可以低功耗状态进行工作,大大提高了装置在极限工作情况下的运动容错率。同时,这样的结构设计也可以帮助实现水下工作环境对于运动平衡性的要求。
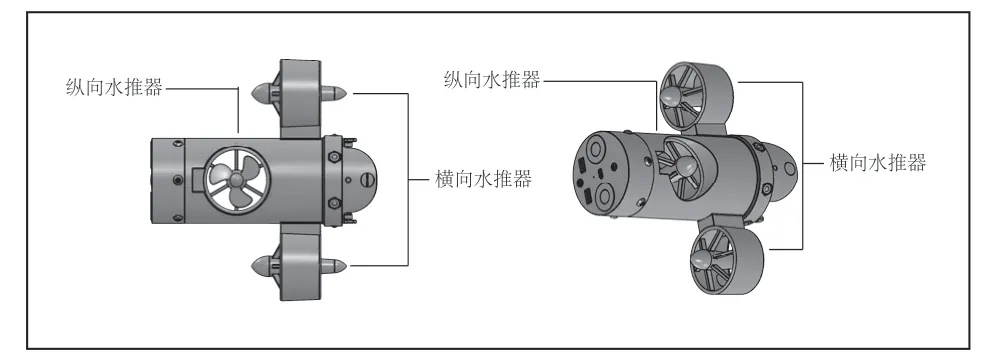
图1 驱动装置结构示意图
■1.2 功能区块设计
结合水下搜救及探索工作的功能需求,将主要功能定位于自动避障越障、生命体征监测、音频通话及图像回传、导航定位回传四项功能。将各大功能模块平均分布在直径为90mm 的蛇头结构表面,各功能区块分布结构如图2 所示。
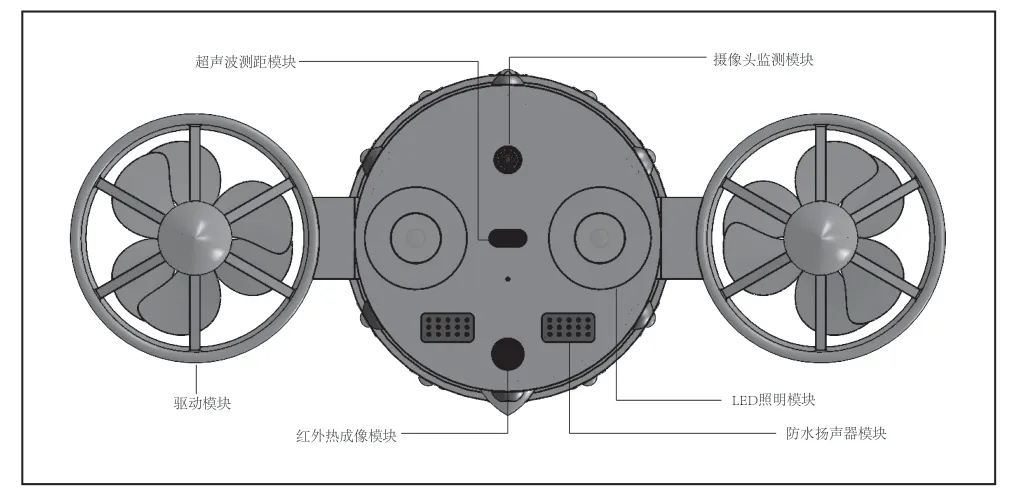
图2 功能区块分布图
■1.3 关节结构设计
由于水下仿生蛇形搜救机器人的关节机构要实现左右偏转摆动和上下俯仰摆动的功能,所以在关节整体架构上采用俯仰-偏转双模块正交结构,两个运动方向的最大摆动角度预计按照±90°(采用180°舵机实现精准转角运动)设计,而实际最大摆动角度可根据需要在电控信号上加以调整。
我们采用锥齿传动结构作为设计主体,用正交关节+锥齿轮传动,舵机与传动结构的主动轮相连接,运动时通过呈90°分布的锥齿结构传递动力,由于从动轮与关节内壁相固定的设计,从而实现关节之间的俯仰-翻转运动。我们在此基础上还增加了空转啮合齿轮结构设计,采用三个轴线垂直的直线圆锥齿轮组作为传动机构。关节单元构成示意如图3 所示。

图3 关节单元构成示意图
其工作原理为主动齿轮通过舵机与端部活动关节固定,从动齿轮通过轴与中间固定管连接,其中一个从动齿轮与中间固定管固定,无相对转动,另一个从动齿轮可自由转动。当舵机驱动主动齿轮旋转时,主动齿轮与固定端从动齿轮相对转动,带动端部活动管转动,实现关节沿一个方向的旋转。而可自由转动的空转端从动齿轮用于补偿主动齿轮单侧啮合导致的受力不均匀,更好的保障了装置运行的平稳性。同时也在一定程度上延缓了舵机驱动轴的使用寿命,另一个关节方向的转动与上述同理。整体效果如图4 所示。

图4 最终方案整体效果图
■1.4 蛇身结构设计
由于在实际应用场景中蛇身需满足蜿蜒摆动、前后移动的多方向运动,拟在蛇身布置万向球装置(牛眼轴承),优先考虑选用非金属万向球轴承,按间隔60°布置,当机器人在海底管道内部进行蜿蜒扭曲运动时,万向轮可依靠装置与管道内壁的摩擦实现万向转动,有效降低蛇身与管道间的摩擦,有效地解决了装置在海底管道等狭小水下空间移动灵活性的问题。蛇身万向轮位置结构如图5 所示。
蛇身模块的首个关节和尾部关节均为左右偏转摆动关节,以便于更好的调整运动方向及摄像角度。蛇身整体结构中共有4 个左右翻转关节及3 个抬升关节,关节之间均为模块化连接,可根据具体应用场景进行特殊装配。
关节裸露位置在外侧设置了密封防水防尘罩(橡胶防尘波纹管)装置,在实现装置整体防水功能的基础上,同时也防止了因水下环境中的扬沙、水草进入装置内部而造成的运动故障。蛇身防水防尘罩位置结构如图5 所示。
综上所述,本装置主要由蛇头、蛇尾结构(驱动机构)、蛇身结构(防护及辅助运动机构)及关节结构(运动姿态调整机构)三部分构成,整体结构如图6 所示。出于装置结构清晰化的目的,作爆炸视图分析如图7 所示。
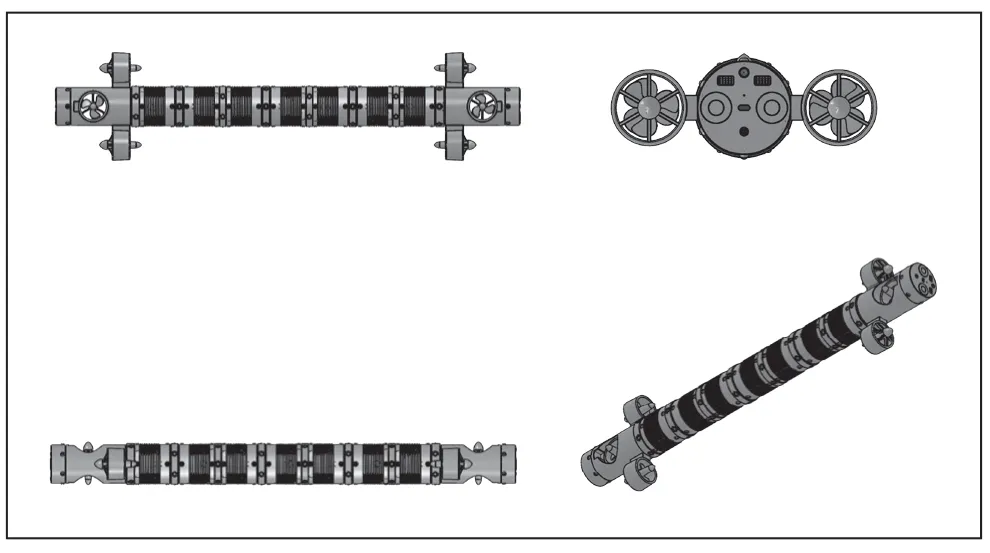
图6 整体结构示意图

图7 装置爆炸视图
2 运动姿态分析
该装置在水下场景中工作时的运动姿态主要参照了“蛇形蜿蜒曲线”的概念,其运动原理如图8 所示,该类型运动主要依靠水推器驱动结构与水平翻转关节单元的配合运动。首先,利用横向水推器驱动结构向前航行,在航行过程中,第一水平翻转单元进行小角度转动进入正弦运动轨迹,达到图8 中的b 姿态,之后,后接的水平翻转单元也依次完成小角度翻转以完成最终的蜿蜒运动。

图8 蜿蜒运动原理图
3 控制系统设计
水下机器人总体控制方案,如图9 所示,控制系统主要包括水上控制器、姿态控制系统、图像控制系统三部分。姿态控制是对水下机器人进行姿态调整,包括水下机器人悬停控制、水下机器人前进、后退以及下潜等控制。图像控制主要是对于水下图像的采集,包括拍照、录像等操作。
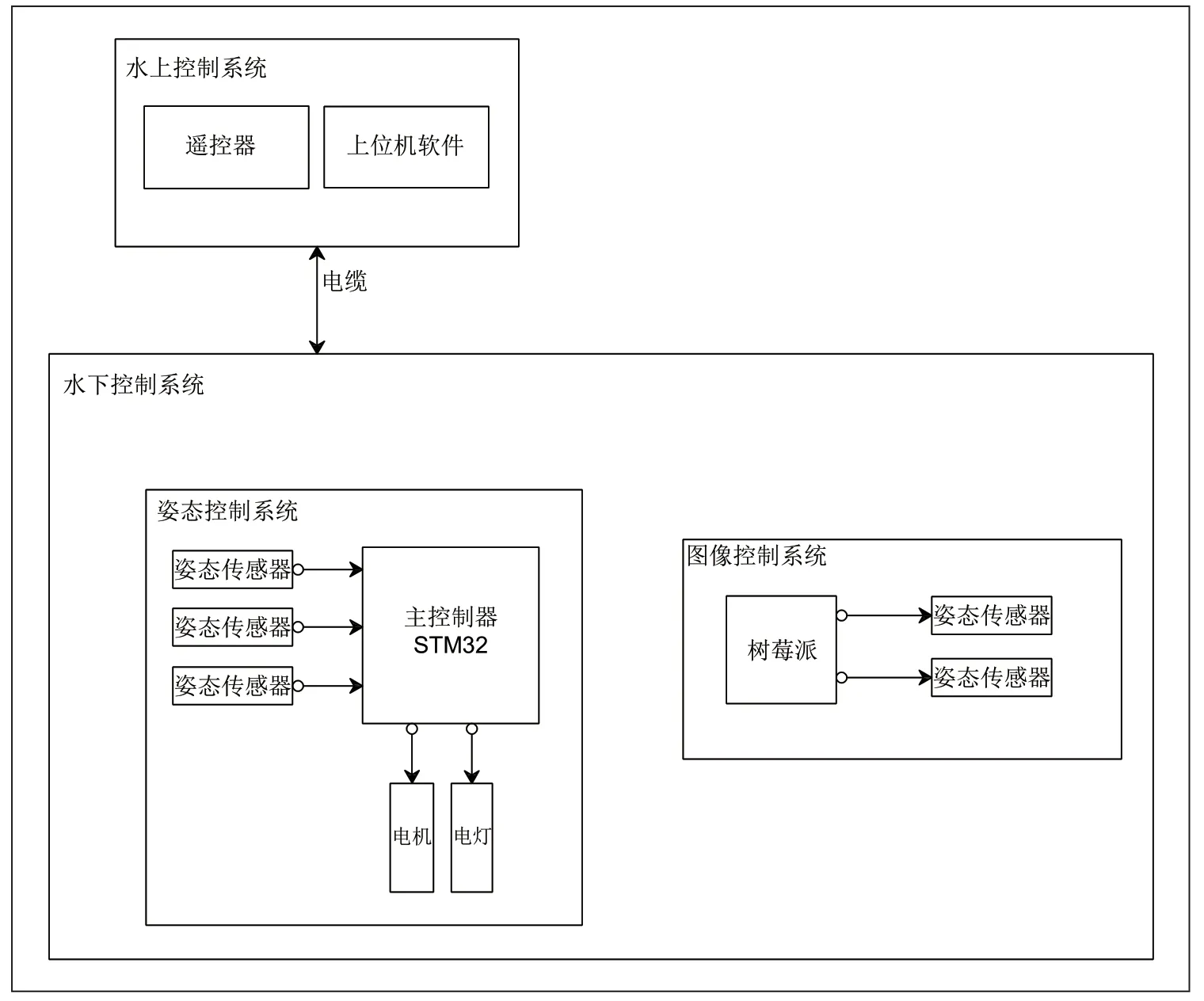
图9 总体控制方案
■3.1 姿态控制系统
图10 为姿态控制系统总体框图。机器人的运动控制系统需要完成的任务,包括机器人所有自由度的协调控制、机器人与上位机软件的实时通讯,以及在自动模式下控制机器人进行自平衡调整。

图10 姿态控制系统总体框图
3.1.1 姿态算法设计
姿态控制原理图,如图11 所示,水下机器人接收遥控器发送来的姿态角,作为期望角度输入到控制系统中与姿态解算算法解算出的实际姿态角度进行求取偏差,分别经过各自的PID 控制器进行PID 运算,运算结果转化成电机调速的PWM 方波来调节四个电机的转速,从而调节水下机器人的姿态和运动。调节后的姿态角又进过姿态反馈环反馈给了输入为下一次控制做准备。经过反复试验调试发现采用单级PID 控制飞行姿态。水下机器人悬停则是姿态算法控制的一种特殊的情况,即期待的横滚角设定在零度。

图11 姿态控制原理图
3.1.2 电机伺服控制方式
水下机器人的控制具体实现方案,如图12 所示,采用开环控制和闭环控制相结合的方式。

图12 控制原理图
开环控制上位机可以直接控制水下机器人的运动,也可以利用控制箱内的摇杆,通过模-数转换器,把摇杆的模拟量转化成数字量传入STM32F407,再通过CAN 总线传入水下的控制器直接控制PWM 的占空比来控制电机的转速和转向。闭环控制则是利用姿态传感器的反馈水下机器人姿态,然后对水下机器人进行位置控制,但为了获得更多和更高质量获得角度数据通常使用6 轴姿态传感器(陀螺仪)即MPU6500,通过该传感器可以通过姿态解算算法的获得相对准确欧拉角,把欧拉角再传入姿态控制器,通过姿态解算出控制每个电机转动PWM 调整水下机器人到合适的姿态。
■3.2 图像采集系统
3.2.1 图像采集系统原理分析
图像采集系统原理,如图13 所示,图像采集的主控板选择树莓派,树莓派通过控制舵机转动从而控制小型云台的位置,改变摄像头位置。摄像头则通过SCI 接口直接连接到树莓派,通过远程连接,将电脑和树莓派相连,控制摄像头完成响应的动作。

图13 图像采集系统原理图
3.2.2 图像采集系统云台设计
图像采集云台,如图14 所示,该云台由两个舵机组成,上边的舵机控制摄像头俯仰角度,下边舵机控制摄像头的方位角。使用30~150 度的云台机制, 这个范围足够用于相机。

图14 图像采集云台
4 实验测试分析
为了测试装置在实际应用中的运动性能,分别测试装置在无障碍物清澈水下环境、无障碍物浑浊水下环境、有障碍物浑清澈水下环境、有障碍物浑浊水下环境四种场景下通过5m 水平距离所需时间。具体数据如表1 所示。

表1 实验数据记录表
表1 数据表明,该装置在无障碍物清澈环境和无障碍物浑浊环境中利用水推起器结构航行通过5m 水平距离的时间分别为12.83s 和13.83s,在有障碍物清澈环境和有障碍物浑浊环境中,航行通过5m 水平距离的时间分别为18.89s和24.30s。分析数据可知,水下环境的清澈程度及障碍物数量会对装置的水下识别航行速度产生影响,其中存在障碍物因素对于装置航行的干扰程度相较于环境清澈程度的干扰来说更大。该装置在各项针对性实验过程中运行平稳,无明显卡顿现象。
5 总结
本文创新之处:(1)采用“横纵双向”水推器驱动结构,并结合“双驱动模式”,运动效率较高。(2)利用锥齿传动关节单元实现“蛇形曲线”运动,同时兼顾了运动精度及灵活性。(3)结合了模块化结构设计,实现了“即插即用”的功能。
浩瀚的海洋中蕴藏着极其丰富的资源,而海洋探索技术的落后所暴露出的问题也在随着海洋探索研究的逐步深入而逐渐浮现,所以目前建立一套完善的海洋装备体系尤为重要。在未来,或许针对水下蛇形机器人的进一步相关研究可以帮助我们实现在海洋探索领域上的技术突破。
