磁探拖体的磁补偿参数地面校准方法
2023-09-08佟晓筠
韩 琦 ,李 尤 ,薛 奇 ,乔 治 ,王 琛 ,佟晓筠
(1.哈尔滨工业大学 信息对抗技术研究所,黑龙江 哈尔滨,150086;2.哈尔滨工业大学(威海) 计算机学院,山东 威海,264209)
0 引言
随着海洋装备的不断发展,近海安全成为各国最为关注的问题之一,对于多物理场的探测要求也随之不断提高[1-3]。磁探仪(magnetic anomaly detector,MAD)作为目前主要的磁法探测装备,是对海洋背景磁场进行测量的有效手段之一。磁探仪多装备于航空平台,通过飞行测线对海洋低空空间进行航空磁法测量。然而,由于磁场信号在空间中衰减较快,磁探仪与磁异常源较远时,探测到的磁异常信号较弱,航空磁测数据可能难以反映海底磁异常。海洋拖体作为一种可以贴近海底的被动航行器,可以大大缩短测量点与磁异常场的距离,从而更精确地实现海洋磁场测量。
然而,任何平台搭载磁探仪都不可避免地要进行磁干扰补偿,这是由于搭载平台本身具有磁性,会影响磁场测量精度。但是在以往的磁探型拖体中往往忽略了磁干扰补偿的步骤。这并不是因为拖体不存在磁干扰,而是因为拖体不具备类似于航空平台的机动性能,从而无法实现校准。
由拖体搭载磁探仪在测量过程中也不可避免地会受到拖体自身材料产生磁场的影响,这种平台结构产生的磁场通常由T-L(Tolles-Lawson)模型进行描述。T-L 模型解释了平台磁干扰的3 个主要原因: 1) 恒定场,恒稳电流产生的磁场和硬磁材料中的剩余磁化场;2) 感应场,平台中软磁材料受地磁场磁化产生的磁场;3) 涡流场,穿过平台的磁通量发生变化而引起的涡电流所产生的磁场[4]。这3 个原因经常被捆绑在一起[5-6]。正是由于磁探拖体与航空磁探平台的安装方式和作业模式是相似的,所以很自然地可以将航空平台中磁干扰的补偿模型用于拖体平台。但是,即使拖体磁干扰可以采用航空平台磁干扰的建模方法,由于缺少切实可行的校准方法,也未见有文献提及对拖体磁干扰的校准和补偿方法。文献[7]对比了部分针对拖体磁梯度张量系统的载体磁干扰补偿方法,但是针对梯度张量系统的补偿与磁场标量测量系统的补偿完全不同。
文中通过对磁探拖体建立磁干扰补偿模型,基于地磁场平稳假设,建立与航空平台校准方法等效的地面校准方法。最后,通过在拖体上进行实测地面校准对所提方法进行验证,结果显示所提方法相比于未进行磁干扰补偿的原始拖体磁探测噪声有明显的改善。
1 磁探拖体系统与磁干扰模型
1.1 磁探拖体系统
文中所研究的磁探拖体结构如图1 所示。拖体由主体和尾翼两部分组成。其中拖体的外壳均为刚性结构体且含有磁性,不存在可活动结构。

图1 磁探拖体结构示意图Fig.1 Structure of magnetometer towfish
拖体中用于测量磁场的传感器包括铯光泵磁力仪和磁通门磁力仪,其中磁通门的安装是用来测量拖体与地磁场之间相对旋转角度的。设备舱中安装有数据采集器,采集器内置有GPS 定位装置,能够同步采集光泵磁力仪数据、磁通门数据和位置数据。为了避免其他设备对高精度磁力仪产生影响,将铯光泵磁力仪安装于拖体头部,磁通门磁力仪和数据采集器安装于拖体中后端。
将磁探拖体置于平静的地磁场环境下进行测量,在远离拖体的地方架设有同型号的参考铯光泵磁力仪。静态环境下拖体中测量到的环境磁场和参考数据噪声基本一致,表明铯光泵磁力仪的一致性良好,拖体磁探系统中机载电子(on-boardelectronic,OBE)等动态磁场干扰较小,其主要磁干扰源应该是由恒定场、感应场和涡流场构成,比较符合T-L 模型的假设。
1.2 拖体磁干扰模型
首先建立拖体坐标系,坐标原点O是铯光泵磁力仪所在位置,以拖体的主体方向为L轴,拖体悬挂方向的反方向为V轴,V轴指向地面,T轴与L轴、V轴之间满足右手定则。图2 中: N 表示地磁北向;HE表示地磁场向量;α、β和γ分别表示T轴、L轴和V轴与地磁场向量之间所成的夹角。
拖体中铯光泵磁力仪的输出可以表示为地磁场与拖体磁干扰HI的加和,实质上则是拖体磁干扰在地磁场方向上的投影,即
根据T-L 模型,拖体磁干扰可以被看作是恒定场、感应场和涡流场之和,并且可以写成常系数与余弦值相乘的形式,即
式中:ui代表拖体坐标系三轴与地磁场之间的夹角的余弦值;而pi、aij和bij是T-L 模型中需要确定的未知参数。由于磁通门磁力仪的输出X、Y和Z代表地磁场在拖体坐标系三轴的投影大小,通常利用式(3)来计算ui。
在航空平台上,可采用校准圈飞行的方式来确定未知参数,由于拖体没有动力装置,无法在空中进行机动动作,所以拖体磁干扰补偿的关键在于如何设计与飞行校准方案等效的地面校准方案,以保证对拖体T-L 模型未知参数的稳定求解,以及如何应用未知参数对动态拖体数据进行补偿。
2 飞行与地面校准方法等效性分析
2.1 飞行校准方法
确定T-L 模型中的未知系数是校准的重要步骤,这一步骤在航空平台中通过飞行校准圈进行。在校准圈过程中要求平台在高空4 个相互垂直的航向上分别执行±10°俯仰、±5°横滚和±5°偏航3 种机动动作,每种机动动作各执行3~5 次,每次持续时间约10 s,整个校准飞行持续时间约6~8 min,期间由航空平台上的光泵磁力仪和磁通门磁力仪在校准飞行期间分别采集标量形式和矢量形式的磁场数据。完整的校准飞行过程如图3 所示。
在工程应用中为了便于求解T-L 模型的未知系数,通常在距离地面较高的高度(>3 000 m)来进行校准飞行,以避免地磁异常场为校准过程带来额外不可控的误差。所以在航空平台的校准过程中可以假设地磁场是均匀的,即HE为常数。此时式(2)可以简化为
通过式(4)可以看出在校准过程中,只要保证地磁场梯度均匀或近似均匀,就可以在求解未知系数的过程中忽略地磁场的影响,这一结论在众多文献中也得到了验证[8-9]。所以在设计等效的地面校准方法过程中,在保证地磁场梯度近似均匀条件下,同步采集光泵磁力仪和磁通门磁力仪,就可以作为飞行校准圈的等效数据。
2.2 地面校准方法
通过前文的分析可知,要想令地面校准方法等效于飞行校准方法,需要控制地磁场近似为常量,即可以在地面校准过程中应用式(4)来进行T-L 模型未知参数的求解。所以在试验过程中,首先需要选择一片地磁场均匀的区域,通常选择在周围没有人工建筑的平坦区域,即可保证全程不受地磁场梯度和人文磁干扰的影响。
为了与飞行校准过程中的机动动作进行等效,设计如下简易装置辅助拖体平台进行机动动作:首先搭建图4 中所示灰色无磁吊架,将用于吊起拖体的缆绳固定于支架中部;开启拖体中的数据采集装置,同步采集铯光泵磁力仪数据和磁通门磁力仪数据。
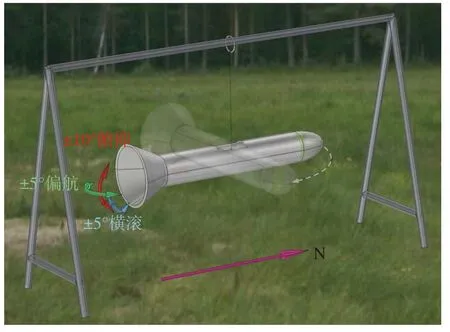
图4 地面校准示意图Fig.4 Ground calibration
待磁探设备工作稳定后,令拖体朝向北向,由身上没有磁干扰的试验人员手动操作拖体进行等效于校准飞行的横滚、俯仰和偏航动作,动作过程中应保持以悬挂点为中心,试验人员应保持每组动作的一致性。随后将拖体水平转向东、南和西向执行相同的操作。保证拖体绕缆绳水平调换方向的目的是为了等效航空平台在飞行校准圈的转弯动作,如图4 中灰色虚线所示。所有方向的操作均完成后,令拖体继续平转回到实验最初朝向北向的状态。校准过程结束。
在校准过程中,全程架设参考日变磁场站,用于补偿校准过程中日变环境磁场变化引入的误差。通过修正日变后的铯光泵磁力仪数据,可以作为式(4)中的拖体磁干扰HI,而磁通门磁力仪的数据可以求解校准过程中的ui。从而构建了线性方程组,利用文献[5]中的方法进行T-L 模型未知参数pi、aij和bij的求解,即可完成与飞行平台等效的校准过程。
2.3 磁探拖体实时磁补偿
假设根据2.2 节方法计算得到该拖体平台的T-L 模型系数为pi、aij和bij。在拖体动态摆动过程中的任意时刻t,采集到铯光泵磁力仪的输出为HT(t),磁通门的输出为X(t)、Y(t)和Z(t)。通过式(3)计算得到ui(t)。将ui(t)与pi、aij和bij代入式(4)计算得到HI(t),即为任意时刻的拖体磁干扰。通过式(5)即可实时解算得到平台磁干扰补偿后的待测量地磁场值。
结合磁探拖体采集器内置的GPS 定位装置,即可获得空间磁场测量结果。
3 试验验证
3.1 地面校准过程
地面校准过程采用1.1 节所描述的磁探拖体进行地面校准方法的验证,试验地点位于荆州。试验过程中架设日变参考探头用于修正日变影响。共选择了4 片场地(A、B、C 和D)进行测试,4 片场地的梯度从0.1~1.5 nT/m 不等。共求得8组T-L 模型的未知参数,详情见表1。

表1 试验基本情况Table 1 Experimental situation
试验流程如下:
1) 架设无磁支架,并将磁探拖体按照图4 与支架进行安装,令磁探拖体朝向正北方向;
2) 在当前朝向上执行±10°俯仰、±5°横滚和±5°偏航3 种机动动作,每种机动动作各执行3~5 次,每次持续时间约10 s;
3) 保持拖体水平状态将拖体旋转90°至东向、南向和西向,在每个方向上重复步骤2) 的动作;
4) 保持拖体水平状态将拖体旋转90°至北向,结束当前校准过程。
3.2 地面校准结果
在航空校准中通常采用特定频带内的标准差来计算校准改善比用于评价校准质量[10]。由于地面校准过程在去除日变干扰后理论上不存在数据的漂移,所以不需要进行滤波,通过计算每一次校准前后的标准差的比值作为改善比来评价校准质量。改善比越高,代表校准质量越高。8 次地面校准过程的结果如表2 所示。

表2 地面校准试验结果Table 2 Experimental result of ground calibration
结合表1 和表2 可以看出,补偿前拖体的标准差基本一致,说明拖体的磁干扰满足文中所讨论的T-L 模型所描述的磁干扰。补偿后的标准差存在一定差异,并使得改善比存在显著的区别。
在地磁梯度较大的场地C(1.5 nT/m)中,观察到改善比相比于A、B 和D 明显变差。这是由于地磁梯度的变化较大,在计算过程中铯光泵磁力仪的输出中有较大成分不是来自于拖体磁干扰而是来自于地磁梯度,这作为误差影响了对模型未知参数的求解过程。类似于在飞行校准过程中选择了地磁梯度明显的区域进行校准的结果。由于试验人员手动操作拖体模拟机动动作的准确度有限,同样条件下不同组的数据改善比也有差异,因此如何实现规范动作是需要进一步解决的问题。
图5 给出了8 次地面校准中补偿前后的示意图。从图中可以看出,地面校准方法对拖体磁干扰的补偿效果是有效且显著的。在场地C 和D中,地磁场梯度约为1.5 nT/m 和0.5 nT/m,此时对T-L 模型的未知参数计算产生影响,可以明显在补偿后的磁场中观察到不同方向呈现台阶状。所以,在采用地面校准方法过程中,应尽可能控制地磁场梯度小于0.2 nT/m。
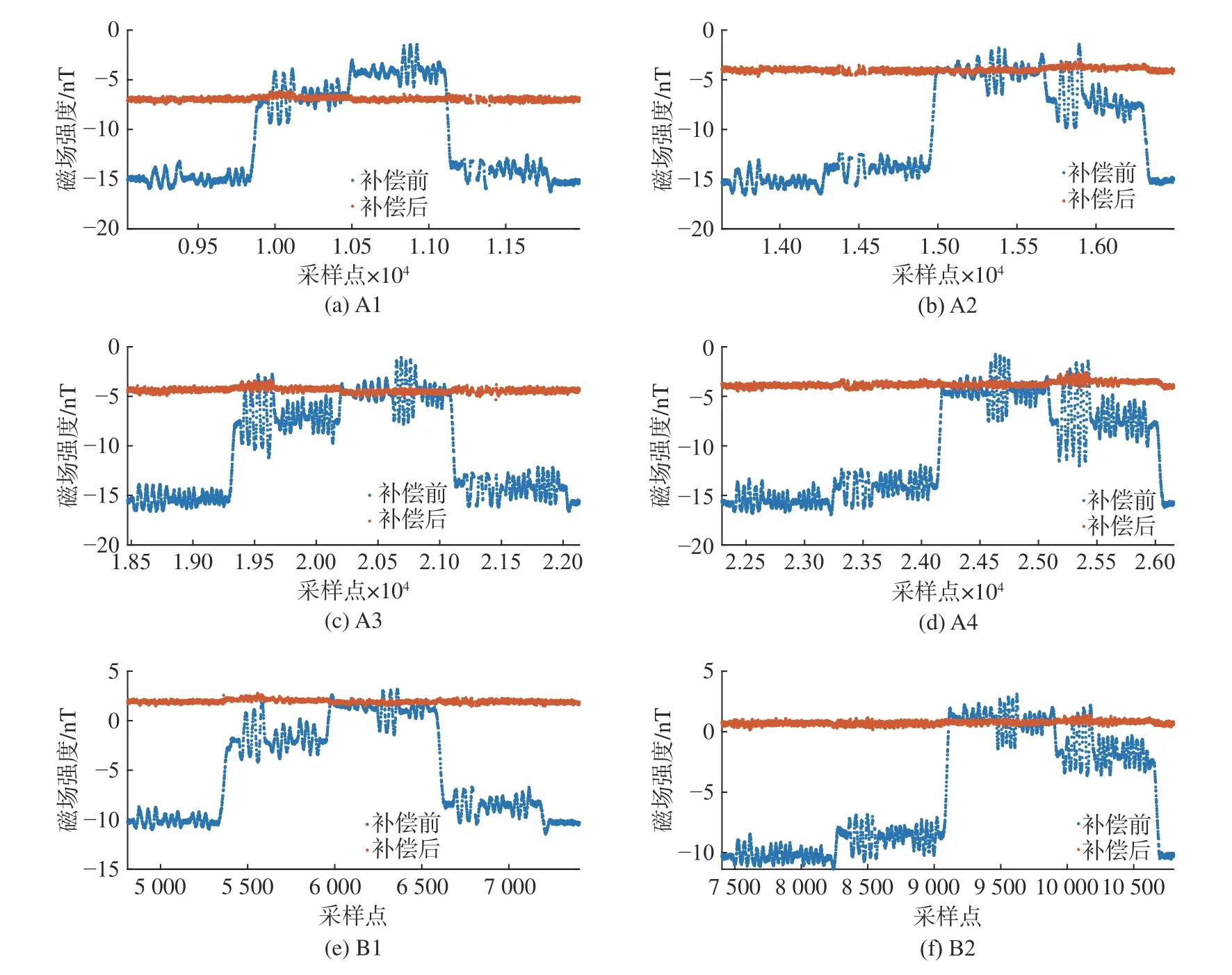
图5 地面校准补偿前后结果图Fig.5 Results of ground calibration before and after compensation
图6 给出了磁探拖体在典型动态作业过程中的磁干扰补偿效果,典型动态作业时长大于6 min。补偿过程选择地面校准中计算得到的系数B2,补偿过程根据2.3 节的式(5)。图6(a)中为原始磁场的补偿前后对比,补偿前拖体在作业过程中仍然存在较多姿态变化,从而引入了拖体磁干扰。补偿后的测线则更为平稳。图6(b)为在经过0.04~0.6 Hz 的滤波后,补偿前后的效果对比,采用该频带的依据是基于动态作业过程中拖体的运动频率。在滤波后数据上计算标准差来评价补偿效果,其中补偿前标准差为0.220 5 nT,补偿后标准差为0.045 9 nT,测线段改善比为4.808 1。试验结果显示,补偿前后的磁干扰补偿效果显著。

图6 动态作业补偿前后结果图Fig.6 Results of dynamic operation before and after compensation
4 结束语
磁探拖体的磁干扰补偿是拖体应用于磁场探测过程中的重要问题。文中针对磁探拖体难以进行动态校准的问题提出了一种磁干扰地面校准方法,通过将校准过程中地磁场梯度均匀性假设迁移至地面校准方法中,设计了校准方案。试验结果表明,在地磁梯度小于0.2 nT/m 的场地进行文中方法可以达到改善比为16 的模型系数。并对所提方法在动态作业过程中对磁干扰的补偿效果进行了验证,试验结果显示文中方法能够有效补偿磁探拖体磁干扰。
近年来航空磁补偿中已经广泛采用了TLG(Tolles-Lawson-Gradient)等模型来补偿磁场梯度带来的影响[8,11],但在地面校准中无法像文献中的方法一样直接求出梯度补偿参数,在实际应用中,可通过地磁场模型(如国际地磁参考场模型等[11])大致估算出当地的磁场梯度系数,可以在一定程度上实现梯度补偿的效果。
