船闸人字闸门合拢对位检测装置优化设计
2023-09-08龙潇飞
龙潇飞
(长江三峡通航管理局,湖北 宜昌 443000)
1 引言
随着内河航运事业的迅猛发展,过闸船舶日益增多,为保障船闸安全、稳定、高效运行,船闸运行越来越多地运用智能化手段对设备运行状态以及运行参数进行调整与监控。其中,船闸人字闸门关闭后,左右两扇门体之间的门缝值与错位值决定着门体是否正常合拢,在闸室充泄水过程中,门缝过大会导致较大的错位值产生,而错位值过大会造成闸门受力不均,严重时会对闸门结构造成永久性损伤。
某高水头单级船闸通过激光测距仪在线监测闸门门缝的变化值以及错位值,完善人字门运行安全监测漏洞。但由于激光测距仪安装在某高水头船闸人字门门头,日常工作环境较为恶劣,长期受到阳光、温度与雨水等环境因素影响,导致激光测距仪高频率出现“死机”现象。激光测距仪“死机”后,船闸运维人员无法读取人字门的门缝与错位等数据,影响船闸关键参数在线监测,这常常需要工作人员到现场进行设备的调整来恢复读值。为解决上述问题,本文针对现阶段合拢对位检测装置中的激光测距部分进行分析优化。
2 设备现状
某高水头单级船闸在关终合拢情况下人字门合拢对位检测装置如图1 所示。
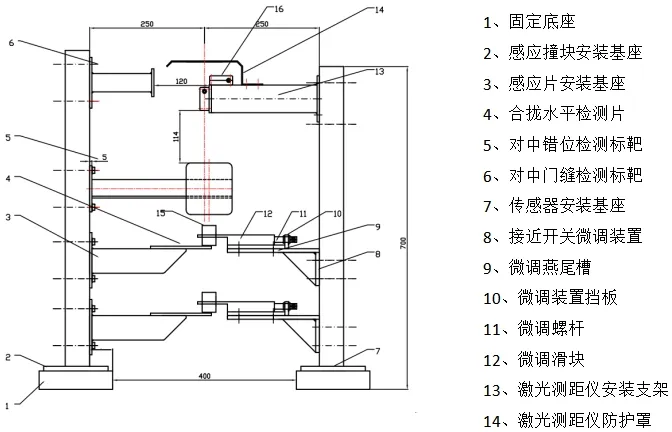
图1 人字门合拢对位检测装置
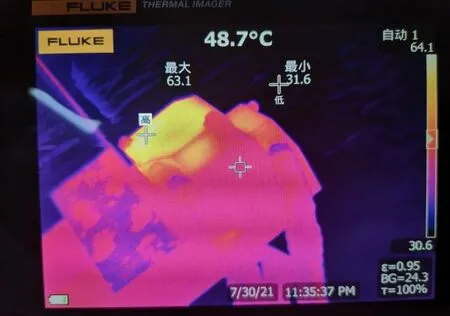
图2 热成像仪测量画面
现阶段人字门合拢对位检测装置的基本原理是:检测门缝值时,激光测距仪水平安装于一侧闸门的支架上,通过检测对侧门体上的标靶距离,根据关终门体测量出的距离值为零点计算得出实时门缝值;错位值通过垂直安装的激光测距仪测量另一侧门体上与水平面呈45°倾角安装的标靶,将高度变化值转化为门体相对水平距离值。
现阶段运行过程中,担任门缝与错位检测的激光测距仪出现高频率故障,同时与天气、季节变化有关,在天气晴朗的夏季中午及下午故障高发。据此推断,造成激光测距仪故障的主要原因可能是环境光强度过高或者阳光直射下产生的高温所造成。为了明确装置故障的原因,确定改进方向,为此进行现场试验进行论证。
实验采用了FLUCK 公司的热成像仪对高温天气下的激光测距仪进行测温。在多次进行温度采集后发现激光测距仪夏季实际工作温度在超过60℃任正常工作,由于传感器工作温度设计为-10℃~+60℃,传感器在超过一定的工作温度范围内仍然正常运行,体现出了该型号激光测距仪的稳定性,同时排除了温度是造成仪器故障的主要原因。
对环境光强是否为诱发激光测距仪故障的原因进行实验,由于阳光照射强度较难选定特定光照强度值,实验使用光强测定仪与人造光源照射选取特定光强,将其照射激光测距仪接收端5 秒,光强每上升5000Lux 进行一次测量,直至设备出现故障。
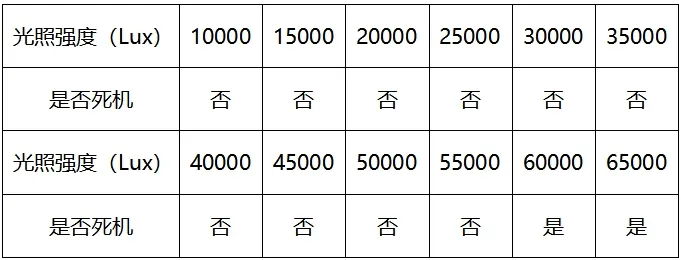
表1 光照强度实验
再次对55000Lux 到60000Lux 每1000Lux 进行光照实验。
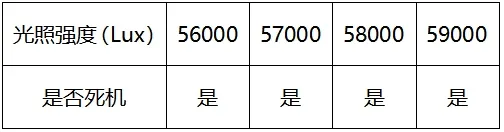
表2 光照强度实验(二)
从实验中可得出结论光强在56000Lux 及以上照射时,激光测距仪出现无法自行恢复的故障。结合温度实验可以判断出诱发激光测距仪故障的主要原因为环境光强度过高所造成。
故障原因确定之后,研究设计合适结构形式的遮光装置成为需要解决的关键问题。
3 结构优化设计
由于运行于某大型高水头单级船闸的激光测距仪工作环境恶劣,根据传感器所处环境,设备需阻挡阳光直射,同时具有一定防止雨水与隔热的功能。传感器与标靶处于两个移动门体之上,同时遮挡装置太大容易产生与闸室船舶碰撞的风险,因此设计装置必须小巧不突出门体。考虑到检测装置安装在室外工作,材料选用了不锈钢,既美观又确保检测装置工作稳定耐腐蚀。
根据以上思路,我们设计优化了新的合拢对位检测装置,如图3 所示。
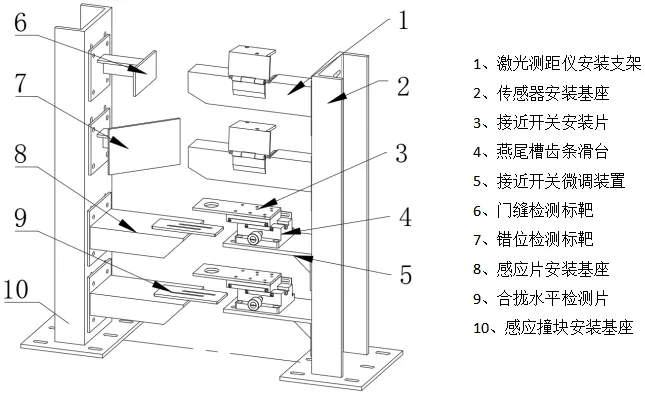
图3 合拢对位检测装置(优化后)
优化后的装置在门体正常调整合拢后校对,将测得门缝值与错位值设为零值。在正常的关门合拢流程中,门缝值为门缝测量值与校对值的差值,错位值还需减去门缝值。针对现阶段的合拢对位检测装置运行工况进行分析,根据故障记录统计,80%以上的故障发生在错位检测传感器上,而门缝检测传感器相对稳定可靠,我们重点对错位传感器安装支架进行了重新设计。由于现阶段的错位传感器垂直安装时易受到水面反射光与周围门体结构、水工建筑等的反射光,为此新设计的装置将错位激光测距仪水平放置,标靶设置为一个14.04°角度倾斜的反射板,在实现相同功能情况下减少杂光影响。
重新设计的激光测距仪安装支架将传感器内置在相对封闭的腔体之中,实现隔绝雨水、阳光直晒问题,沿传感器的发射端与接收端设计相应的遮光筒,减少接收端接收到的光线入射角,同时内壁设置吸光材料,做到最大程度削减杂光对激光测距仪接收端的影响。
如图4,新设计的激光测距仪支架与其盖板之间通过橡胶条密封防止雨水进入其中,盖板通过螺纹固定。在装置底部同时设计有走线槽、通风板,若有雨水渗漏进入可通过底部通风板流出。传感器安装支架的前端设计有沿测距光的遮光通道,底部设计有一定斜率,使雨水无法进入,设计遮光通道长度为X,遮光通道高为Y,则可以根据设计值计算出,可照入阳光最大夹角tanα=Y/X=0.5,通过计算阳光夹角α ≈26°33′。
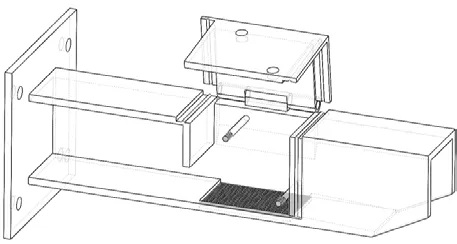
图4 激光测距仪安装支架
通过查询资料,对比一年的阳光入射角可以知道某大型高水头船闸夏至8:00 至17:00 阳光入射角大于α,在阳光入射角最小且日光不够强烈的冬至10:00至15:00 入射角大于α,设计理论计算满足遮光要求。
4 设计原理误差
人字门在关终位置附近运行时,无论左门超前还是右门超前的“门缝与错位”变化状况是对等的。也就是说分析左门超前或者右门超前产生的检测误差是等价的。下面主要以一边门超前进行设计原理误差进行验算。
本文优化结构中的设计原理误差是由于人字门在运行时,门体运行轨迹实际为一条弧线,在人字门运行后,检测传感器激光与标靶之间产生了一个角度变化,角度变化量将对测量值造成一定误差,此设计误差应控制为2mm 以内。
根据现阶段的装置设计与相关资料我们可知最大相对角度变化Δθ=0.58°,据此我们可以计算出门缝的最大误差值。门缝错位检测示意图如图5 所示。
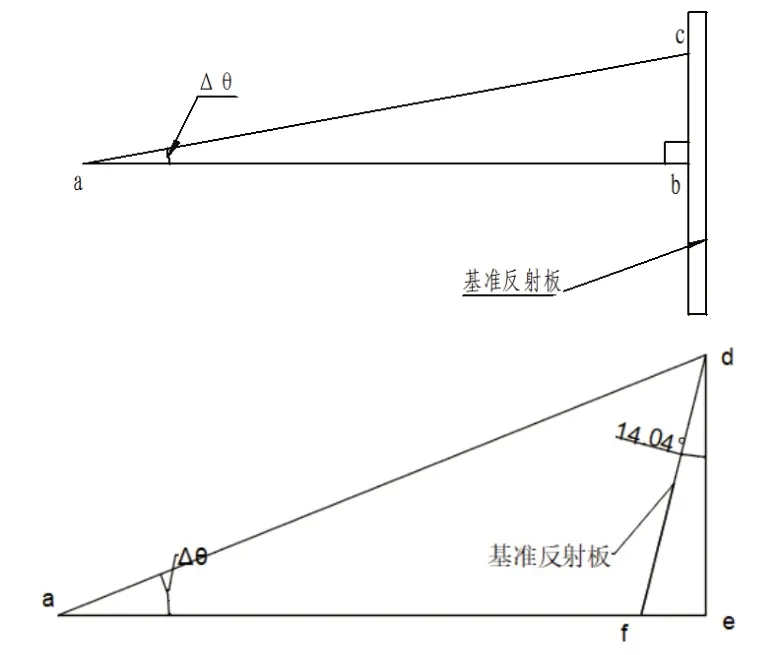
图5 门缝错位检测原理误差分析示意图
ab——为门缝传感器测距时激光应该发射的方向
ac——为最大相对角度变化Δθ 时,门缝传感器测距时激光实际发射的方向
af——为错位传感器测距时激光应该发射的方向
ad——为最大相对角度变化Δθ 时,错位传感器测距时激光实际发射的方向
已知传感器的最大测距值为300mm,当Δθ =0.58°时,产生的测距误差最大,设门缝与错位最大测距误差分别为ΔS、ΔZ,ac =ad=300mm,错位标靶与垂直夹角∠fde=14.04°。
则ΔS =ac-ab =300-300×cosΔθ=300-300×cos0.58°=0.015mm
ΔZ=ad-af=ad-(ae-ef)=300-(300×cosΔθ-300×sinΔθ×tan14.04°)=0.774mm
因此,门缝检测原理误差≤0.015mm,错位检测原理误差≤0.774mm,错位检测实际误差为错位传感器检测原理误差与门缝检测原理误差的综合误差。根据一般误差的合成方法:已定系统误差按代数和合成。原则上可以将ΔS+ΔZ=0.789mm 作为错位实际误差,由于0.789mm ≤2mm,误差值在允许设计范围内,同时对检测装置门缝检测精度的影响较小。
5 主要技术特点
该装置优化后主要有以下技术特点:
(1)使用激光测距的方式,将门缝状态数据化、实时化,采用非接触的方式进行测量,防止装置互相碰撞,增加了装置的可靠性。
(2)传感器置于封闭腔体之类,隔绝了日晒雨淋,同时设计装有遮光罩,防止阳光直射,减少环境光的入射角度,增加了激光测距仪的工作寿命与工作可靠性。
(3)错位检测标靶按一定倾角安装,将两门体的相对距离变化通过计算转化为相对水平变化。
6 结语
本文简单介绍了现阶段船闸合拢对位检测的数据化方式,激光测距仪在船闸中的运用,在对现有问题进行分析研究后提出了一套问题解决方案。
