星冕仪制冷机黏弹性隔振平台的非线性振动建模分析
2023-09-07刘宝禄许明明窦江培
张 宏,刘宝禄,许明明*,窦江培
(1.中国科学院 南京天文光学技术研究所,南京 210042;2.中国科学院 天文光学技术重点实验室,南京 210042;3.中国科学院大学 天文与空间科学学院,北京 100049)
0 引言
太阳系外生命及系外行星的探测一直都是国际天文学领域研究的热点之一[1-3]。星冕仪作为系外行星直接成像的关键部件之一[4],其稳定性要求极高,因为如需探测到距离观测仪器10 pc 处的类地行星系统,则角分辨率需达0.1″,也就是说,星冕仪模块目标成像对比度将高达10-8及以上。提高星冕仪光学稳定性的方式主要有主动光学矫正、热控和微振动抑制3 种。本文主要论及微振动抑制。
在轨航天载荷的微振动抑制技术主要有主动隔振、被动隔振、主被动混合隔振以及半主动隔振技术,其中,被动隔振技术因无需外部能源,在空间任务中能有效压缩载荷质量,且具有可靠性高、稳定性强的优点,故应用较为普遍。目前工程上常用的被动隔振系统物理模型通常为弹簧与阻尼元件的并联组合[5-7],其与黏弹性材料的Kelvin-Voigt 本构模型一致,能够在一定程度上反映隔振器的动力学特性,有助于对隔振系统进行理论分析。然而,随着空间载荷的指向精度要求越来越高,对于隔振系统的要求愈发严苛,相关研究从传统的线性隔振系统纷纷转向非线性的振动设计领域[8],并大量使用黏弹性阻尼材料[9]以及记忆合金[10]等新型材料进行微振动抑制。例如:邹元杰等[11]设计了用于大型环形天线的黏弹性阻尼器和金属橡胶阻尼器,试验结果表明被动隔振方案下振动幅值分别下降了78.7%和66%;庞世伟等[12]针对高分辨率遥感卫星设计了黏弹性隔振方案,隔振器在轨工作正常,满足各项功能指标要求;Uchida 等[13]研究了超弹性合金在航天器微振动隔离器中的应用,并研制了支柱式隔离器,结果表明其在室温下满足传递率要求。考虑到在诸如黏弹性材料的非线性领域中继续使用线性的振动模型可能会使得研究数据精度下降,因此需要拓展传统的线性物理模型以适应非线性的微振动隔振理论研究。
本文基于中国空间站巡天望远镜(CSST)星冕仪制冷机振动模块,对传统的黏弹性材料弹簧-阻尼并联模型进行非线性扩展,假设模型所含弹簧元件提供三阶多项式的弹性恢复力,通过改变外界激励条件,研究扩展后的模型在受迫振动时的动力学行为,旨在提高黏弹性隔振平台的设计精度,进一步理解空间制冷机隔振器的微振动特性,为愈发复杂的微振动隔振设计提供新思路。
1 隔振器物理模型
通常,CSST 星冕仪制冷机产生的微振动经连接螺栓传递至间隔结构,隔振器即安装于连接螺栓上(如图1 所示)。该隔振系统由上平台及基座组成,制冷机刚性安装于上平台,上平台与基座中间由4 组隔振单元连接,隔振单元垂直高度为H。假设平台以及制冷机是总质量为m的刚体,则4 组隔振单元的质量远小于m,故不考虑隔振单元的质量。P-xyz为原点固定于上平台质心的定坐标系,即该坐标系不随上平台的移动而改变;B-xyz为实验室定参考坐标系。系统内所有坐标系及旋转角都遵循右手法则。

图1 星载制冷机模型隔振示意Fig.1 Schematic diagram of vibration isolation for a spaceborne cryocooler model
由于所采用的隔振器为硅橡胶材质,故作黏弹性材料假设,物理模型如图2 所示,用单自由度运动方程来离散连续系统。

图2 隔振系统物理模型示意Fig.2 Schematic diagram of the physical model of the vibration isolation system
该线性固体黏弹性材料的本构方程为
式中:σ为应力;E为弹簧的弹性模量;ε为应变;μ为阻尼的黏度参数;t为时间。
2 硅橡胶隔振器准静态试验分析
硅橡胶具有良好的隔振、耐高温及耐低温等特性,因此常被用于空间载荷的隔振系统。使用试验机测试单个硅橡胶隔振垫在不同压缩载荷下的变形(如图3 所示),其中,压缩载荷采用位移方法控制,直到位移达到-5 mm。测试得到的载荷-变形曲线如图4 所示,可观察到非线性荷载位移特征。以导出非线性阻尼的表达式。图5 为一个扩展的非线性实体模型,其中弹簧是非线性的,故将其命名为非线性实体模型。非线性弹簧表示系统的刚度是非线性的,提供弹性力k1x+k2x2+k3x3,其中:k1是弹簧的线性刚度;k2是二次刚度系数;k3是立方刚度系数;x是质量块的动态位移。

图3 硅橡胶隔振垫压缩试验Fig.3 Compression test of a silicone rubber isolator

图4 硅橡胶隔振垫位移-负载特性曲线Fig.4 Load-displacement characteristic curve of a silicone rubber isolator

图5 Kelvin-Voigt 模型与非线性实体模型Fig.5 Kelvin-Voigt model and nonlinear solid model
橡胶材料属于一种高分子材料,其分子微观结构是由卷曲的长分子链铰接形成的结构。当受到外界载荷拉伸时,卷曲的长分子链逐渐伸直,从宏观上看,这种长分子链的伸直可以表现为尺寸高达几倍的大变形;当外界拉伸载荷消失后,伸直的长分子链又可以恢复原状[14]。因此,与传统圆柱螺旋弹簧相比,硅橡胶隔振器呈现出明显的非线性特征。
对实验数据进行多项式函数拟合,迭代次数13 次,达到10-9的Chi-sqr 的容差值,拟合收敛。其负载与形变的关系为y=a0+a1x+a2x2+a3x3+…,其中:a0=0.8,a1=-24.7,a2=177.8,a3=-329。
与线性振动方程相比,非线性的弹性力关系更适宜建立振动控制方程。
3 非线性振动建模
考虑到材料模型的非线性,对式(1)加以扩展,
式中:τ=μ/E为黏弹性松弛时间常数;x是描述质量位移的坐标。本构方程(2)是一个常微分方程,它给出了施加在质量上的黏弹性动力F(t)。
系统的运动微分方程为
式中:m表示模块的质量;f~为激励力的振幅;ω为激励频率;φ为相位角。
对于周期激励,通过谐波平衡法可得x的前三阶表达形式如下:
由于位移分量并非全部同相,所以不再可能对弹性力和阻尼力进行简单解释,故在此引入所有项同相的简化表达式。同时,式(2)的解有如下形式:
式(4)和式(5)中,a0,a1,a2,f0,f1s,f1c, …皆为待确定系数。
忽略式(3)与式(4)中激励频率高于三次的亚谐波与超谐波,将式(4)和(5)代入式(2),则对于式(2)的零阶项,有代数方程

式(7)给出了系统的弹性响应,它是与x同相的机械力。式(8)给出了系统的阻尼力,与频率相关,相对于位移x具有相位差。同理可得出二阶与三阶对应的项:

同理可得二阶、三阶项的控制方程,通过这6 个控制方程,可找到未知参数a0,a1,a2,a3的数值解。
阻尼力可写为
其中,刚度呈现出经典的线性、二次和三次项,与线性黏弹性中获得的动态刚度一致。事实上,目前的方法是将系统的非线性行为考虑在内的线性弹性系数的扩展。
式中ζ是阻尼比。将式(12)和式(13)引入式(3),则有
式(15)是具有二次和三次非线性的单自由度非线性系统对黏弹性行为的推广。涉及二阶时间导数的项是惯性力;第二项表示恒定刚度(具有线性、二次和三次分量);第三项与一阶时间导数相关,表示非线性阻尼;等号右端为外部激励项。式(15)可直接进行数值求解,不必再利用谐波平衡法进行计算。
4 模型分析
根据硅橡胶隔振器准静态试验分析(如图4 所示)可知,线性刚度应用于振动模型时省略了更高阶的弹性分量,显然与实际不符,会导致线性拟合黏弹性材料的载荷-变形特性出现极大偏差(如图6所示),数据分析精度下降。

图6 硅橡胶隔振垫载荷形变特性的线性拟合Fig.6 Linear fitting of the load-deformation of a silicone rubber isolator
扩展后的非线性实体模型主要适用于采用黏弹性材料的微振动隔振系统。在黏弹性材料呈现较强的非线性弹性行为时,二次及更高阶次的刚度分量会对该模型的精度产生显著影响;然而更多的高阶项意味着求解时的计算量大幅上升,会对数值求解造成阻碍。因此,选用合适的阶数是平衡精度需求与计算量的关键。
隔振器组件的阻尼特性可通过对硅橡胶隔振垫施加循环应力得出。设计特定工装夹具,首先控制压缩位移到-1 mm,随后释放,再施加拉伸负载到1 mm,通过该位移控制方法循环 0.1 Hz 的准静态载荷,结果如图7 所示。
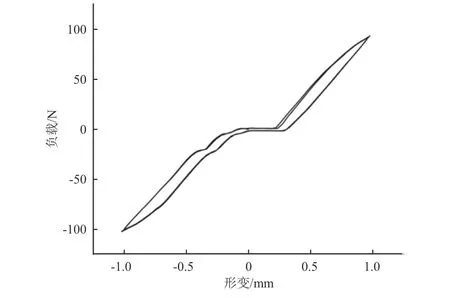
图7 循环载荷测试结果Fig.7 Test results of cyclic load
当黏弹性阻尼材料受到交变应力时,其应变滞后于应力德尔塔相位角,从而产生滞后效应。单个循环中拉伸-压缩变形模式下阻尼材料单位体积的能量损失为ΔW=πγ2E1tanδ=πγ2E2,其中:E1为储能模量;E2为损耗模量;γ为应变幅度。
一个循环中阻尼材料每单位体积的总应变能为W=(γ2E1)/2,因此,黏弹性阻尼材料的损耗因子可定义为tanδ=ΔW/(2πW)=2ζ,根据该式即可得出测试材料的阻尼比ζ。
为分析该动力学模型的动力学行为,将式(15)用一阶方程组表示,即

图8 为隔振系统随外部激励幅值f变化的相轨迹曲线,可见系统在该条件下表现出复杂的运动行为。

图8 不同受迫激励幅值f 下的系统相平面Fig.8 Phase plane of the system with different forcing excitation amplitude f
图9 为隔振系统随外部激励幅值f变化的幅频曲线,可见:激励幅值的增加导致系统的振幅随之增大。由图9 可见特有的跳跃现象,即随着激励频率增大,隔振系统的振幅沿幅频曲线变化:当达到点2 时,振幅则从点2 跳跃至点3;若激励频率ω逐渐减小,振幅从点4 开始沿曲线的下半分支变化至点5 处;再减小ω,振幅则从点5 跃至点6,然后沿曲线的上半分支向点1。因此受迫振幅在点2~3的振动是不稳定的,这说明外部激励幅值f对整个系统影响很大。在实际隔振系统中,应当尽量控制激励振幅的大小,从而保证系统的平稳运行或工作。
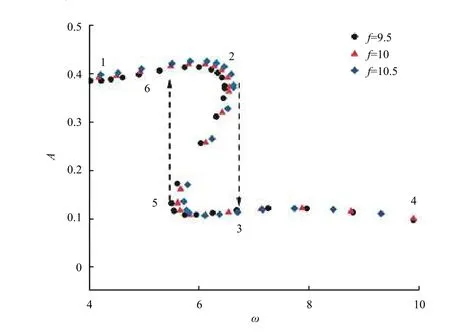
图9 外部激励幅值对系统振幅的影响Fig.9 The influence of external excitation amplitude on the vibration amplitude of the system
固定激励幅值,初始值取x1=0,x2=0,外部激励频率变化对系统的影响如图10 所示,可见:随着外部激励频率的逐渐增大,全部相轨迹渐进趋于一条封闭曲线;而当激励频率继续增大时,轨迹线逐渐退化为以原点为中心的圆。这表明系统有着稳态的周期运动。


图10 外部激励频率对系统相轨的影响Fig.10 The influence of external excitation frequency on the phase track of the system
5 结束语
本文以中国空间站巡天望远镜(CSST)星冕仪制冷机的被动隔振系统为研究对象,通过在标准线性固体材料中引入弹性力获得了单自由度的非线性振动模型,从而对Kelvin 模型进行了扩展,并从中导出非线性阻尼;然后以微分形式获得了扩展后的几何非线性Kelvin 模型振动运动方程。该模型能够补充现如今常用隔振系统的振动理论所涉及的非线性项内容,适用于非线弹性明显的结构假设。
下一步研究将考虑在理论分析的基础上进行更全面的实验以及优化设计,通过设计新的非线性振动试验装置来验证该模型的精确度。
