星载天线热变形摄影测量技术研究应用进展
2023-09-07蒲理华刘博学马小飞
蒲理华,刘博学,马小飞
(西安空间无线电技术研究所,西安 710000)
0 引言
星载天线主要用于星地、星间电磁信号的传输,是卫星的“顺风耳”与“千里眼”。卫星在轨运行时,星载天线处于周期性的冷热交变环境中,会产生由结构热应力引发的热变形,从而造成天线辐射方向畸变,进而导致天线波束指向误差和增益变化,最终影响天线在轨性能,降低天线的可靠性。因此,有必要在研制阶段对天线的在轨热变形进行仿真分析以预判天线性能,并指导有关材料在选用、结构设计、热控设计、制造和装配工艺等方面的优化。而为了避免仿真分析的局限性,保证天线最终在轨的电性能,开展星载天线地面热变形测量已成为高精度天线研制过程中的一项关键工作。
1 测量原理和方法
由于星载天线自身结构和所处工作环境的特殊性,其地面热变形测量技术有别于传统的变形测量方式,具有以下特殊要求:
1)高精度测量。为提高和保证卫星的通信速率、容量和覆盖范围,星载天线反射面自身型面精度和热稳定性要求极高(一般达到亚毫米量级),还要保证天线较高的指向精度,因此,对测量技术的精度要求达到微米和角秒量级。
2)大尺寸测量。随着星载天线朝着可展开、大尺寸方向的发展,对其开展热变形测量采用经纬仪、跟踪仪等传统逐点测量的方式在效率和经济性等方面已无法满足需求,需要有能满足大尺寸测量的新方法。
3)非接触测量。星载天线热变形测量过程所处的高低温环境不适于三坐标测量机、激光跟踪仪等高精度接触式测量技术;同时,轻量化、柔性化的结构设计使天线极易产生变形和振动,限制了天线热变形测量过程中的物理触碰。因此,需要采用非接触测量方式。
4)自动快速测量。星载天线热变形测量过程需要环境模拟设备提供相应的高低温环境,目前国内外对于星载天线的热变形测量主要在真空环境中进行,真空环模设备运行成本高,而天线热变形测量的目标点常可达上千个,因此要求测量速度尽量快,以缩短测量时间;同时,环模设备内部空间有限、环境恶劣,传统的人工测量技术实施难度较大,必须采用自动化程度较高的测量技术。
综上所述,传统的经纬仪交会、三坐标接触测量、激光跟踪仪测量等技术在环境适应性、测量效率及测量接触特性等方面无法满足星载天线地面热变形测量需求,而目前流行的工业摄影测量技术对测量环境没有苛刻的要求,测量精度最高可达到5 μm+5 μm/m,同时具有非接触、速度快、范围广等应用特点,成为目前国内外进行星载天线热变形测量的最主要手段。
星载天线热变形测量时采用的工业摄影测量方法具体步骤包括:1)在天线表面粘贴定向回光反射标志点,包括编码点与非编码点;2)采用高精度测量相机从多个位置和角度对天线表面拍摄一定数量的二维图像;3)利用亚像素图像处理技术自动精确提取相片中批量标志点的图像坐标;4)利用编码标志和基准尺基于摄影测量共线和共面条件方程,经后方交会实现相机位置概略定向;5)利用前方交会自动精确配准技术实现不同图像中同名点的正确配准;6)将配准后的标志点的图像坐标、三维坐标和相机的位姿作为观测值代入光束法平差方程组中,迭代解算出相机位姿和天线表面所有标志点三维坐标的最优结果[1-2]。
工业摄影测量方法的基础是多目立体视觉三维重建原理,如图1 所示。测量中相机位置的确定基于摄影测量共线和共面条件方程:
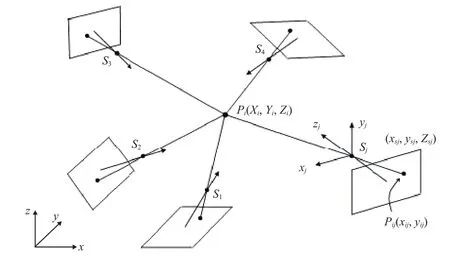
图1 工业摄影测量原理Fig.1 Principle of industrial photogrammetry
式中:x、y为像点坐标;x0、y0为相机主点坐标;f为相机主距;Δx、Δy为像点偏差;a1~a3、b1~b3、c1~c3为组成旋转变换矩阵的9 个参数;Xi、Yi、Zi为点Pi在物方空间坐标系下的坐标;XS、YS、ZS为相机镜头中心S在物方空间坐标系下的坐标;Bx、By、Bz为摄影基线在物方坐标系3 个坐标轴上的投影。
基于上述原理和方法得到星载天线在图2 所示温度曲线(M1~M5)中常温(N)、高温(H)和低温(L)各工况的表面标志点坐标后,天线热变形测量的分析即在此基础上进行。星载反射面天线的热变形主要指天线反射器在经历高低温后的形状变化,故通常以常温下所测量的标志点坐标为基准点,分析高温、低温下所测标志点坐标相对于常温基准点的变化量,即为天线在对应高、低温工况的热变形量[3],计算式为

图2 热变形测量温度曲线Fig.2 Temperature curve of thermal deformation measurement
式中:n为天线表面标志点数量;XiH/L、YiH/L、ZiH/L为高、低温下点Pi在物方空间坐标系下的坐标;XiN、YiN、ZiN为常温下点Pi在物方空间坐标系下的坐标。
2 天线摄影测量研究应用进展
基于上述热变形摄影测量原理,国内外针对不同工况开展了大量的天线热变形测量研究与实践工作:按照测量相机与天线所处的位置不同分为相机内置和外置测量;按照测量相机的数量不同分为单相机摄影和多相机摄影测量;按照测量环境不同分为真空和常压测量。本章将对目前国内外普遍采用的单相机外置、单相机内置、多相机内置3 种测量方式进行系统的总结和探讨;并对西安空间无线电技术研究所开展的常压热变形测量进行重点介绍。
2.1 单相机外置摄影测量
测量相机隔绝在环境模拟设备外,测量时透过环模设备上的专用石英玻璃窗口获得测量照片,相机在测量过程中处于常温常压环境,无须专门防护。由于环模设备石英玻璃窗口位置固定,测量时为实现多位置多角度照片的获取,需要通过机构驱动被测天线转动。
加拿大宇航局曾采用该方法在真空罐中同时完成了2 个1.5 m 口径Ka 频段天线固面反射器的热变形测量[4]。测量时,为避免对摄影的遮挡,采用灯阵替代加热笼;单台相机置于真空设备外,透过罐壁上的石英窗口从固定位置拍摄;将反射器竖直悬挂固定在旋转框架中垂直旋转,以完成反射器正面和背面多角度照片采集;最终,天线反射器正反面热变形测量精度达到0.05 mm。其中天线竖直悬挂的方式还在一定程度上降低了反射器自身重力对测量结果的影响。
西安空间无线电技术研究所作为国内高精度星载天线、大型网状天线最具实力的研制单位,最早采用单相机外置方法完成了“鑫诺五号”等固面天线的真空热变形测量[5]。测量时,测量窗口位于罐顶斜上方,天线水平放置于单轴转台上水平旋转,由相机在固定位置获得天线正面多角度照片完成热变形测量。之所以采用天线水平放置而非竖直悬挂的方式,主要是受真空设备尺寸限制,同时预先考虑并验证了重力对较小尺寸固面天线测量结果的影响较小。目前,该测量方法在2 m 口径固面天线研制过程中发挥着重要作用,测量精度达到0.02 mm,技术能力达到国际先进水平。
单相机外置摄影测量法在相机防护方面降低了操作难度和成本,相机不受温度影响以及有数量足够冗余的测量照片确保了较高的测量精度(理论上可以达到5 μm+5 μm/m);但受限于环模设备测量窗口的位置,测量距离较远、测量角度单一且难以调整又限制了最终的测量精度。同时,为确保测量结果稳定可靠,天线转动时须采用较低的转速或在指定角度间隔停留一定时间达到稳定状态后再进行测量,这种方式牺牲了测量的效率。
2.2 单相机内置摄影测量
令测量相机与被测天线同处于环境模拟设备内,但为保证测量相机正常工作所需的常温常压环境,须用专用防护罐对内置相机进行隔绝控温保护。
基于摄影测量原理,为实现多角度交会测量,一般通过2 种模式实现测量照片的采集:一种为天线位置固定,采用单相机通过机构移动其位姿顺序获取测量照片;另一种为单相机位置固定,被测天线通过机构驱动多角度旋转获取测量照片。
2.2.1 天线固定、相机移动
法国Alcatel 公司[6]曾采用单相机内置摄影测量方法在真空设备中进行了口径1.5 m 高精度固面天线的热变形测量,将天线竖直固定在定制的框架内,控温保护后的相机安装在大范围垂直旋转支架上置于天线前方(如图3 所示)。测量过程中,根据天线尺寸提前调整相机在旋转支架上的安装位置及视轴,使相机通过旋转在不同位置进行环形测量时的视场可以完全覆盖位置固定的天线,以实现天线多角度照片的采集,测量精度达到0.03 mm。天线固定的方式同样能在一定程度上降低天线自身重力对于测量结果的影响。
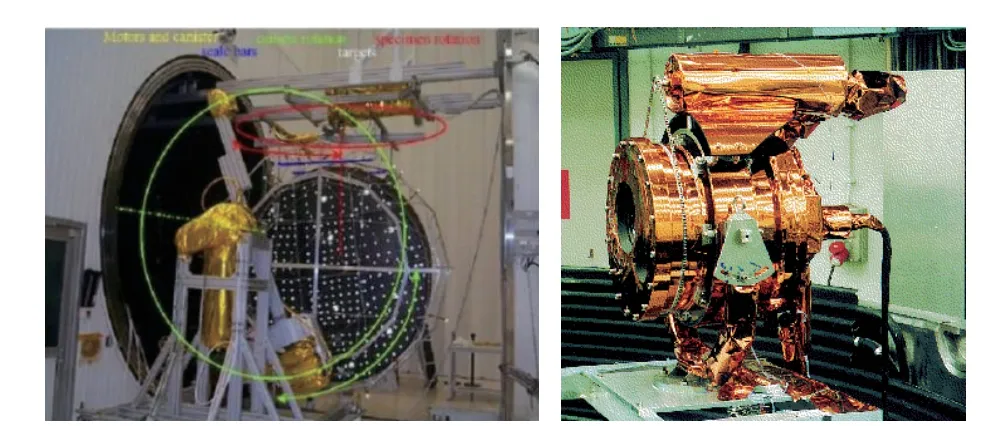
图3 Alcatel 公司天线热变形测量现场及其相机防护Fig.3 Antenna thermal deformation measurement and camera protection in Alcatel
美国NASA 在戈达德航天中心真空罐中采用单相机内置方法以相机悬臂水平旋转环形测量方式完成了詹姆斯·韦伯空间望远镜ISIM 结构的热变形测量[7-10],如图4(a)所示。测量过程中相机采用具有氮气和氦气循环功能的专业相机罐防护,被测产品水平固定置于相机悬臂正下方,相机由悬臂带动绕ISIM 结构完成多角度照片获取,最终对外形尺寸2 m×2 m×1.5 m 的ISIM 结构的测量精度为0.03 mm。NASA 还在约翰逊航天中心真空设备中进行了詹姆斯·韦伯空间望远镜OTIS 整体结构的热变形测量[11],如图4(b)所示。由于OTIS 尺寸较大(7 m×7 m×10 m),采用1 套单相机内置系统进行测量时在旋转机构设计实现、视场覆盖及精度保证等方面均有较大难度,于是采用4 套单相机内置系统组合测量并以相机悬臂垂直旋转环形测量方式分别完成了OTIS 结构4 个区域的多角度照片采集,最终由区域测量解算OTIS 结构的整体变形,测量精度达到0.1 mm。
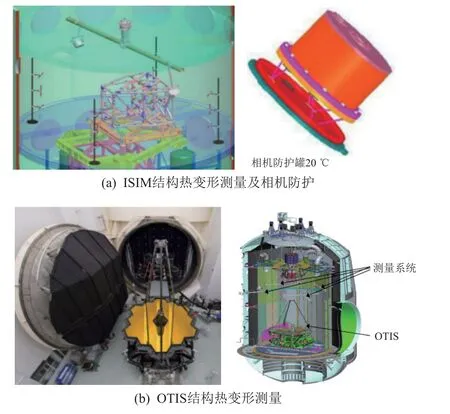
图4 NASA 的热变形测量及其相机防护Fig.4 Thermal deformation measurement and camera protection in NASA
德国IABG 公司也曾采用相机悬臂水平旋转方式对0.5~3.5 m 口径固面天线进行过多次热变形测量[12],测量精度为0.035 mm,其采用的测量设备及相机防护方案见图5。

图5 IABG 的热变形测量及其相机防护Fig.5 Thermal deformation measurement and camera protection in IABG
北京卫星环境工程研究所借鉴上述国外经验,采用水平面双向导轨正直摄影测量方式完成了多幅2 m 口径天线在真空环境中的热变形测量,测量精度达0.05 mm,测量设备及相机防护方案见图6。

图6 北京卫星环境工程研究所的热变形测量Fig.6 Thermal deformation measurement in Beijing Insititute of Spacecraft Environment Engineering
西安空间无线电技术研究所在单相机外置测量技术基础上,进一步发展了单相机内置真空热变形测量方法,在国内首次采用悬臂水平旋转环形摄影测量方式为“天链二号”“嫦娥四号”的多幅高精度网状柔性天线的热变形测量提供了解决方案[13](图7),实现了5 m 内口径天线0.03 mm 的测量精度。

图7 西安空间无线电技术研究所的相机内置真空热变形测量Fig.7 Vacuum thermal deformation measurement in camera internal approach in Xi’an ISRT
2.2.2 相机固定、天线旋转
日本宇宙航空研究开发机构(JAXA)曾对WINDS 卫星的2 幅2.4 m 口径固面天线开展过热变形测量[14],试验在直径13 m、带有天线旋转装置的卧式真空罐中进行,测量时天线通过铝合金支架水平放置于可360°旋转的转台上,相机防护后固定于罐内反射器斜上方,通过转台带动天线多角度旋转,实现内置单相机多角度照片的采集,测量精度达到0.05 mm,如图8 所示。
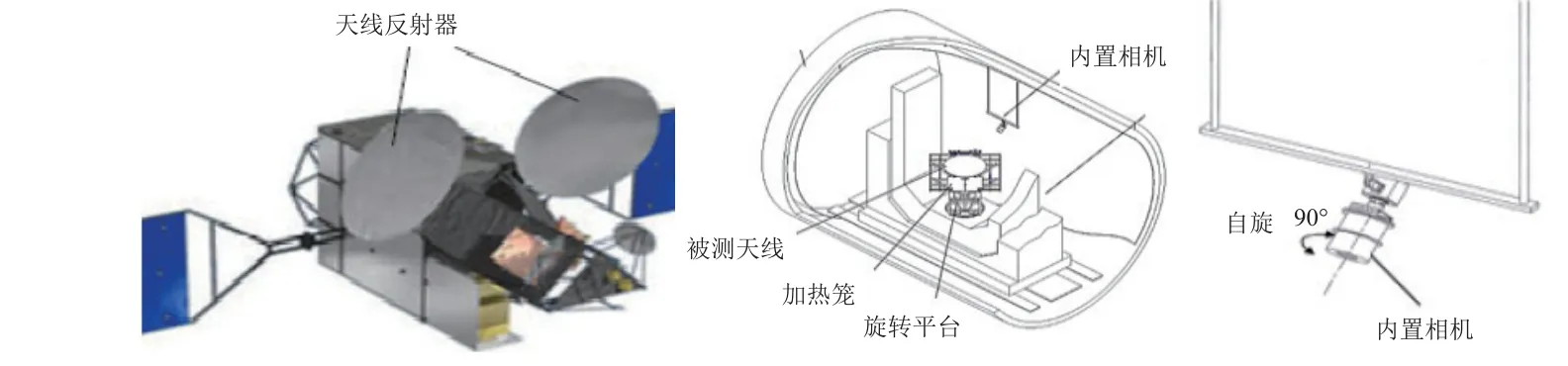
图8 日本WINDS 卫星天线的真空热变形测量Fig.8 Thermal deformation measurement of WINDS satellite antenna in Japan
德国IABG 公司也研究过采用2 套内置固定相机对水平旋转的固面双栅天线正反面进行热变形测量[12],测量时斜上方相机负责天线正面照片采集,斜下方相机负责天线背面照片采集,2 套相机测量结果通过公共标志点完成拼接,测量实施方案及现场照片如图9 所示。
真空热变形单相机内置摄影测量方法拉近了相机与被测天线的距离,相机测站位置多且测量角度灵活,解决了相机外置测量距离较远、角度单一且难以调整的问题,尤其是相机移动、天线固定的测量模式可显著降低天线安装难度、提升测量效率,是对柔性天线进行热变形测量的最佳选择。同时2 种照片采集模式可以进行结合,以进一步提升测量系统和方法的可靠性,理论测量精度同样可达5 μm +5 μm/m。但该方法中相机的真空防护、大型悬臂机构的设计实施以及数据传输等涉及的难度、条件和成本均是测量过程中需考虑的重要因素。
2.3 多相机内置摄影测量
多相机测量采用多台相机同步采集天线在某一温度下的多幅图像,进而得到天线表面所粘贴标志点在该温度下的实时三维坐标,最终由获得的所有温度下的标志点三维坐标分析计算天线热变形。由于环模设备尺寸限制及在其上开设多个测量窗口的不现实性,多相机测量一般采用对相机进行专业防护后内置于真空设备的方式。
美国NASA 曾在直径16 m 的真空容器内采用4 台相机内置组网方式完成了对5 m 口径充气反射面天线(图10(a))的热变形测量[15],安装架上固定相机专门的防护罐(图10(b)),从不同角度对天线进行拍摄(图10(c)),最终测量精度为0.6 mm。又使用同样的测量装置对10 m×10 m 的柔性太阳帆板在直径30 m 的真空环模设备内进行低温环境下展开面形变测量试验[16],最终测量精度为1 mm。
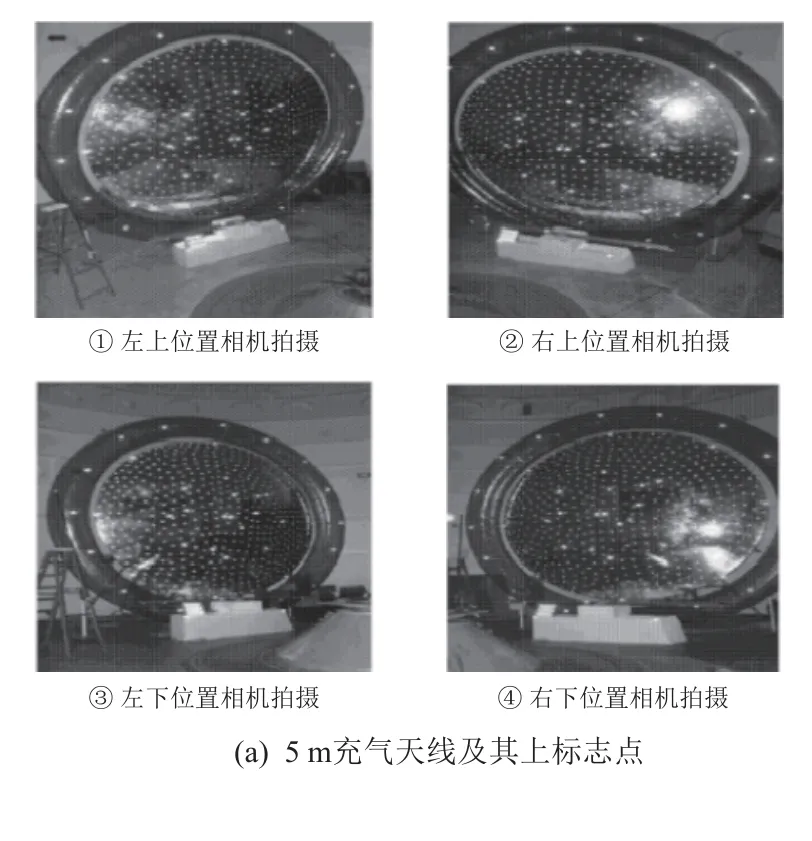
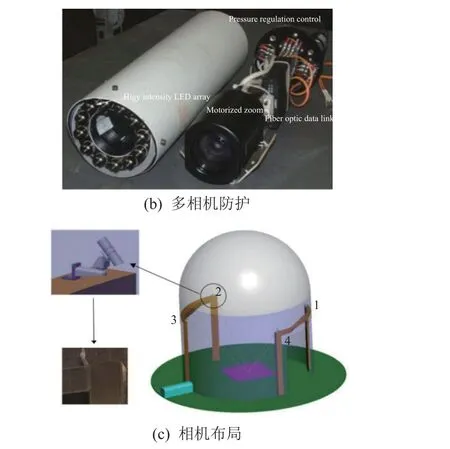
图10 美国NASA 的多相机内置测量Fig.10 Multi camera internal measurement in NASA
北京卫星环境工程研究所和上海宇航系统工程研究所分别对某600 mm 口径(见图11)和5 m×1 m口径(见图12)固面天线采用双相机完成了真空环境下的热变形测量[17-18],测量精度分别达到0.06 mm和0.1 mm,测量过程中相机均进行了专业防护。

图11 北京卫星环境工程研究所的双相机内置测量现场Fig.11 Dual camera internal measurement in Beijing Insititute of Spacecraft Environment Engineering
真空热变形多相机内置摄影测量方法以多台固定站位测量相机联机组网同步测量模式,一键式瞬时获取多角度多位置照片,代替单相机顺序获取照片的方式,实现了天线形状特性的快速测量,大幅提升热变形测量效率。但是,受限于测站数量较少且固定,测量精度相对单相机方法偏低,一般双相机交会测量的理论精度为20 μm+20 μm/m,4 台相机组网交会测量的理论精度为15 μm+15 μm/m,当交会相机数量达到18 台以上时,多相机测量的理论精度才能与单相机测量方法相当;且在实际测量过程中,受相机温度、相机位置稳定性、多相机标定精度及多相机视场重叠覆盖率等因素影响,实际测量精度一般低于理论分析精度。
2.4 常压热变形测量
如上所述,目前国内外对于高精度星载天线的热变形测量主要在真空环境中进行;但是真空罐试验成本高、周期长、占用资源多,严重制约热变形测量工作在众多型号中的推广。同时,随着星载天线朝着大尺寸方向的不断发展使得测量所需的真空罐尺寸不断增大,而大型真空罐的建设成本极为高昂。为了缩减星载天线热变形测量的成本和周期、节约资源、满足众多型号的热变形测量需求,西安空间无线电技术研究所率先开展了对标真空环境温度范围的常压高低温箱热变形测量研究工作,并取得诸多研究成果[19]。常压热变形测量采用高低温箱代替真空罐提供模拟温度环境,其建造和试验成本较低,温度循环速度快,温度变化范围宽(-120~120 ℃),完全满足星载天线热变形测量需求。
天线常压热变形测量可根据温度范围的不同采用人工和自动2 种测量方法,其中自动测量方法又可根据被测天线特性的不同分为相机内置和外置2 种模式。
2.4.1 人工测量
在常压、-60~60 ℃的温度下,为了降低测量网型的构建难度,缩短测量时间,保证测量精度及可靠性,一般采取人工测量方法。此时,环境温度已经超出相机正常的工作温度范围,需要进行隔温防护;同时,对于测量人员也需要采取一定的防护措施,如图13 所示。在提前设计并验证好摄站位置、拍摄角度和照片数量的情况下,采取被动防护措施后,单次测量可以控制在较短的时间(15 min)内并保证较高的测量精度(5 μm+5 μm/m)。

图13 人工测量中的人员及相机防护Fig.13 Personnel and camera protection in manual measurement
西安空间无线电技术研究所采用人工测量方法实现了多个口径5 m 以上大型星载天线部组件的常压热变形测量[20],如图14 所示,突破了测量状态优化设计、测量相机及人员防护、测量网型设计以及测量数据分析处理等多项关键技术。
2.4.2 自动测量
当常压、环境温度超出人体可以耐受的温度范围(<-60 ℃或>60 ℃)时,需采用自动测量方法代替人工测量,针对柔性和固面天线,一般分别采用相机内置和外置2 种测量模式。
1)柔性天线测量
柔性天线自身形状易受扰动,测量过程中需要保持被测天线产品位置固定,因此,借鉴真空热变形单相机内置摄影测量法,采用相机移动,天线固定的测量模式。真空环境下相机内置测量时只考虑密封性和热辐射的相机防护技术已经相当成熟,通常采用防护罐配合隔热多层包裹的方法。但是对于常压下热变形测量相机的防护,除同样要解决密封性和热辐射问题外,强热对流引起的相机温度变化成为相机防护的重点和难点,不能照搬现有的真空环境测量相机防护方法。为此,西安空间无线电技术研究所通过多个型号的攻关,研究出一种常压环境热变形测量内置相机动态实时调控防护方法(见图15(a)):根据防护罐内测温传感器反馈的实际温度主动调节控制冷热气体机将干燥氮气制冷及加热,使气体温度达到一定值后通过管道吹送至防护罐内,同时不断将罐内气体搅拌换热后引至罐外以实现温度平衡,最终可使罐内温度在外部环境温度达到-100~100 ℃时仍保持在相机可承受的温度范围((20±5) ℃)内[21]。得到保护的相机配合相机运行轨道和自旋机构,实现了热变形测量过程的自动化,如图15(b)所示。
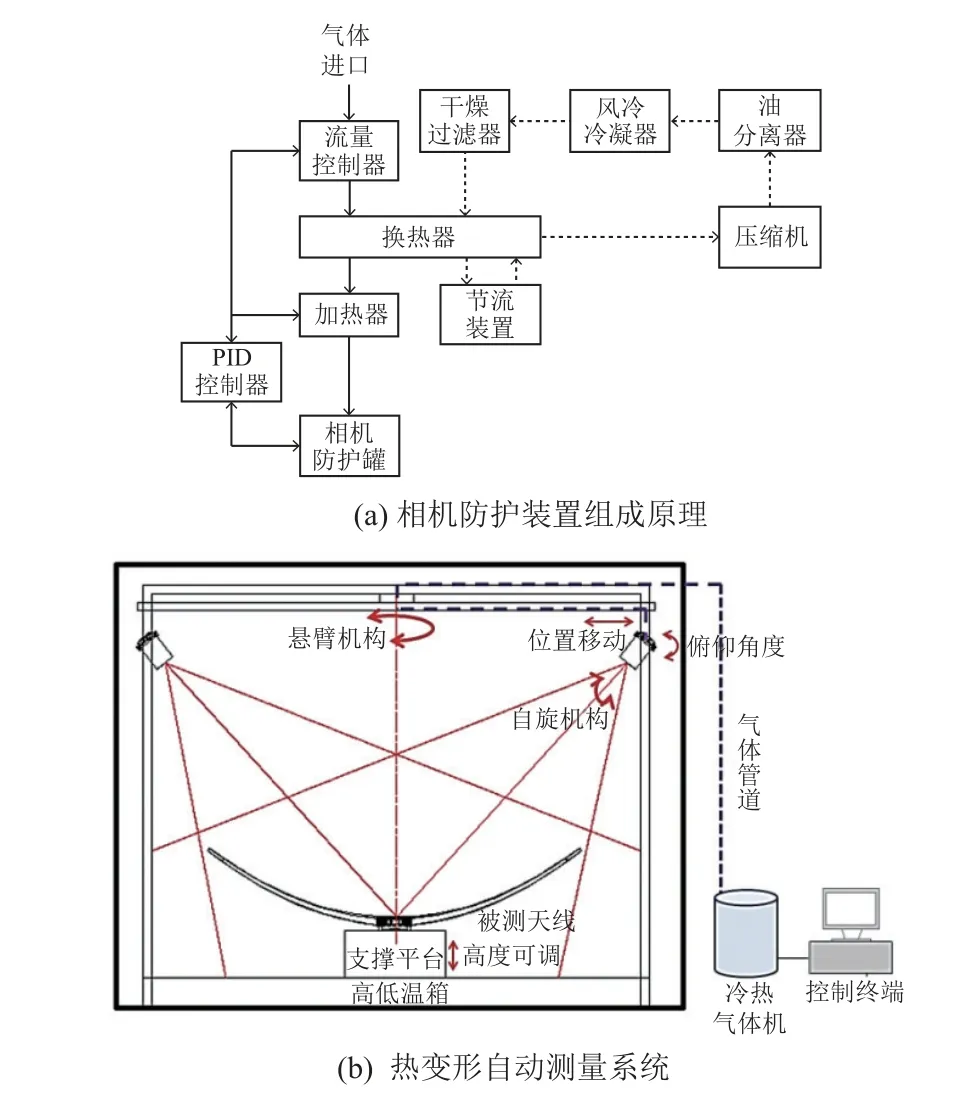
图15 常压相机内置天线热变形自动测量系统及相机防护装置组成Fig.15 Automatic measurement of thermal deformation of antenna under atmospheric environment and protection of internal camera
西安空间无线电技术研究所采用相机悬臂水平旋转环形自动测量方法,以相机内置测量模式实现了口径5 m 以下星载天线部组件在-100~100 ℃温度范围内的常压热变形测量[21],突破了常压环境测量相机高精度防护和现场标定等关键技术,测量精度达到0.02 mm。
2)固面天线测量
当常压、环境温度范围超过-100~100 ℃时,西安空间无线电技术研究所借鉴真空相机外置测量方法,开展了基于高低温箱的相机外置热变形测量方法研究[22]:在温箱侧壁合适位置开设高精度测量窗口(图16),固面天线水平放置于旋转平台上,测量过程中,天线旋转、相机固定。这种测量方式下相机处于常温常压环境中,防护难度低,目前已实现较宽温度范围(-120~120 ℃)、口径5 m 内天线的常压热变形测量,测量精度达到0.02 mm。
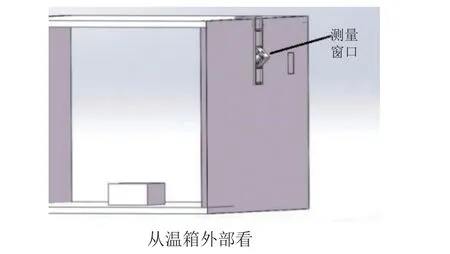
图16 常压相机外置天线热变形自动测量应用场景Fig.16 Application scenarios of automatic measurement of thermal deformation of antenna under atmospheric environment by camera external method
常压热变形测量一般采用单相机方法,其中,人工测量方法可以实现较大尺寸天线的热变形测量,测量方式灵活、速度快且精度较高,但适用温度范围较窄;自动测量方法扩展了热变形测量的温度范围,但适用的天线尺寸相对较小,且相机和转动机构的防护成为测量中的难点。
3 星载天线热变形测量技术研究展望
目前,星载天线热变形测量技术可以实现口径10 m 内天线在常压和真空下的热变形测量,最高精度可达0.02 mm。但是,随着星载天线朝着更高精度、更高稳定性和更大尺寸方向的不断发展,天线热变形测量技术的发展也进入了新的阶段,其中值得研究的方向包括:
1)太赫兹天线亚微米级精度测量
对于口径2 m 左右的太赫兹和激光终端等更高频率的天线,其型面精度要求更高(达到30~50 μm),意味着要求其热稳定性更好,热变形也更小。这类天线的热变形测量需要采用亚微米级精度的测量手段,而目前基于摄影测量原理的方法受限于图像获取和处理方式,其测量精度最高只能达到10 μm,无法满足亚微米级精度要求,因此需要采用激光干涉等更加敏感的测量手段,以实现较大尺寸高精度天线热变形测量。
2)超大和极大尺寸天线热变形测量
目前,国内依靠人工单相机摄影测量实现了10 m 口径天线在常压、-60~60 ℃较窄温度范围内的高精度测量,国外采用多相机测量方法实现了10 m 口径天线真空环境较低精度的热变形测量。而对于10~30 m 超大尺寸天线,需要进一步研究摄影测量多相机内置测量方法,突破网型设计、现场标定、自动测量及实时防护等多项关键技术,以实现超大尺寸天线在-150~150 ℃宽温度范围内热变形测量的高精度和高效率。同时,对于50~100 m极大尺寸天线,其在地面及在轨的装配更加复杂和困难,更需要就天线在轨热变形测量技术进行系统研究。目前基于摄影测量和激光雷达的测量技术可以作为极大尺寸星载天线在轨热变形测量的备选方法,但是对于高精度测量则必须解决摄影测量在轨标定、防护以及激光雷达在轨稳定控制等关键问题,在此基础上,进一步攻关星载天线型面精度在轨主动调整技术,以最终实现极大尺寸天线的在轨总装、测量与实时调整。
3)基于太阳模拟器的天线热变形测量
相较于红外加热笼和红外灯阵等传统外热流模拟设备,太阳模拟器可逼真模拟空间太阳光谱特性,更接近在轨真实情况,同时对于天线热变形测量过程不会产生遮挡,特别适用于复杂表面结构星载天线的地面热变形测量,因此,开展基于太阳模拟器的天线热变形测量技术研究具有重要意义。
4)零重力下的星载天线热变形测量
星载天线地面热变形测量过程中,受环模设备影响,天线一般不卸载重力,即使卸载,受测量环境及卸载方法的影响,最终也不可能充分卸载,残余重力将对高精度、大尺寸天线的热变形测量产生影响。在轨热变形测量是后续解决该问题的有效方法,但是在以地面验证试验为主要手段的现阶段,如何实现精确模拟零重力环境下的天线热变形测量成为另一个需要攻克的关键技术难题。
5)热变形测量数据分析处理及应用
通过摄影测量方法可以获得星载天线在常温及高低温下的表面原始数据,但是目前国内外对于热变形原始测量数据的分析处理并没有统一的规范,并不能准确识别与天线实际性能相关的变形情况,严重限制了热变形测量的实际价值。同时,对于热变形测量所获得实测数据,如何有效应用于由不同材料、结构相互耦合形成的天线热变形仿真模型的优化修正中,实现星载天线在轨性能准确预示并指导天线结构优化设计也是一项亟需解决的难题,因此有必要开展能够反映天线产品真实热变形的数据分析处理方法研究。
4 结束语
本文总结了多年来基于摄影测量原理的星载天线热变形测量技术的研究应用情况,系统地分析了单相机外置、单相机内置、多相机内置和常压环境测量等多种方式的优缺点。随着星载天线向更高精度、更大尺寸、在轨组装等方向发展,如何实现大型、高精度天线地面及在轨热变形测量已成为星载天线热变形测量技术的进一步研究方向;同时,星载天线热变形测量技术在数据分析、应用方面也存在一系列挑战,需要今后进行不断研究探索。
