机器人全方位移动及控制的设计与实现
2023-09-07周陈江郑森财
周陈江 杜 峰 覃 豪 郑森财 黄 辉
(福建理工大学,福建 福州 350000)
随着科学技术和社会生活的发展,移动机器人也在不断更新换代,全方位移动机器人可以在三维方向进行运动,为人类的高危工作和探索月球提供了一种新的方式,航天员在月面上行走的系数极高且不能全天进行探索,而全方位移动机器人可以设计成月球车,车上携带的高技术设备和机构可以代替航天员完成各种任务,同时也可以拓宽人类探索的广度和深度。由于有轮移动机器人的机械结构可靠且操作相对简单,因此成为行星探索机器人最主要的方案。月面移动机器人需要具备跨壕沟、爬斜坡以及很强的转弯能力,还需要具备在狭小的空间内完成探测任务的能力,因此采用普通轮子的移动机器人轮系结构复杂[1]。
针对将全方位移动运用到月球车轮系统中的需要,李格伦[2]提出一种针对全方位移动机器人的运动学分析,有效提高了全方位机器人运动的能力。对Mecanum 轮式全方位移动机器人进行仿真分析和三维建模,由于考虑地面打滑且没有分析轮子空转问题,因此没有全面了解速度与转速的关系。
基于这个问题,该文设计了一种基于万向轮的全方位移动机器人,以满足相关需求。
1 全方位移动机器人
全方位移动指机器人在任意时候、任何地点以及任何环境都可以具备朝任意方向移动的能力。全方位移动机器人全向移动需要设计一种新的轮系结构,使轮组形成高效配合。麦克纳姆轮是使用最普遍和适应性较强的全向轮,但是它生产过程非常复杂,因此成本过高,不能大范围使用[3]。
麦克纳姆轮有一定的优势,麦克纳姆轮表面装有8~12个椭圆形能任意旋转的辊轮,全方位移动机器人可以多角度自由移动,其缺点就是辊轮结构运用让麦克纳姆轮与地面接触的面积不稳定,导致无法稳定运动[4](移动机器人移动的稳定性无法得到保证)。
移动机器人最关键的技术就是万向轮。虽然全方位移动机器人可以朝不同方位移动,但是朝任何方位移动都有约束条件,朝各个方位移动的要求都不同。不同的环境需要设计不同的方法来满足需求,其中一种方法就是变换车轮轴线的夹角,车体运动速度与车轮轴线有统计学意义。改变轮子的布局方式在结构上难以实现,其原因是没有对结构进行测试,不仅不可靠,而且承载力有限。以万向轮为车轮构建的模型进行测试能使车体运动更稳定、控制更准确。
全方位移动机器人微调能力高,运行占用空间小,可以方便地穿梭在狭窄拥挤空间中,灵活完成各种任务。
2 万向轮的结构和分析
正交轮由2 个形状相同的球形轮通过切掉一部分的球冠再贯穿支撑轴安装在一个外壳中共同组成,正交轮的球形轮子架有2 个自由度,即绕轮架电机驱动旋转和绕轮子轴心自由转动[5]。万向轮的轮毂四周安装了10 个滚轮且互相交叉,由图1 可知,在构造方面,辊子与轮毂是正交的。万向轮即具备前后运动的特性,又能在受力后进行左右移动。轮毂和滚轮的运动方向不同,轮毂作为主动轮,滚轮为从动轮。辊子在摩擦力作用下或外力作用下绕辊子轴线旋转,辊子速度方向垂直于轮毂的速度方向[6]。

图1 正交万向轮(直径为10 cm)
为了满足任意方向移动的需求,设移动机器人系统由n个万向轮组成,如图2 所示。轮与运动中心的关系如图3 所示。

图2 全方位轮运动原理
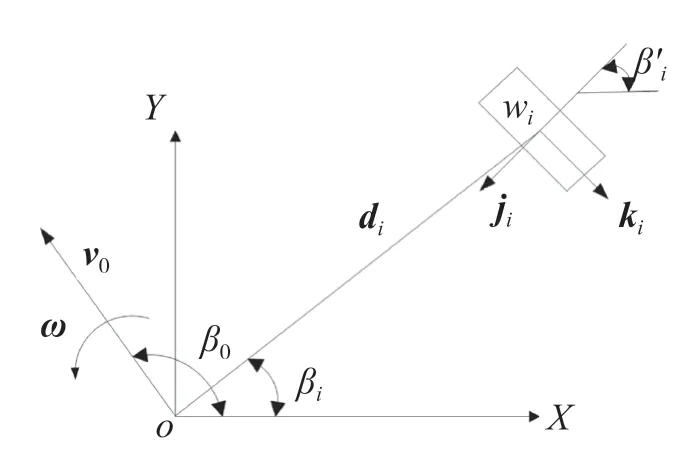
图3 轮与运动中心的关系
根据轮毂与辊子的几何关系如公式(1)~公式(3)所示。
式中:vwi、vri为轮毂中心、辊子中心的速度矢量;vwri为点wi对点ri的相对速度矢量;b为辊子的作用半径;ji、ki为轮毂中心点的一对正交单位矢量;θi、ϕi为2 个旋转角度;vwri为点wi对点ri的相对速度矢量;θ为旋转角度;a、b为轮子、辊子的作用半径;t为时间。
由以上3 个关系可以得到公式(4)。
同时,由于机器人做平面运动,因此可以得到公式(5)。
式中:E为单位向量。联立公式(4)、公式(5),消去,可以得到公式(6)。
转换成标量方程,如公式(7)所示。
由此可得运动学正解方程,如公式(8)所示。
通过运动正解得到运动的速度和角度。运动学逆解如公式(9)所示。
3 驱动设计和压力感应
为了可以连续切换驱动结构的运行模式,轮子内轴孔留有台阶,减速器伸出轴的端面与连接器连接。同时,减速器延伸出来的轴的中心设置螺孔,通过螺钉与轮子进行轴向固定。减速器外圆周使用连接套筒可以与后面的减震器进行连接,并且轮子与减速器延伸轴的周向连接是通过圆头平键实现的,如图4 所示。
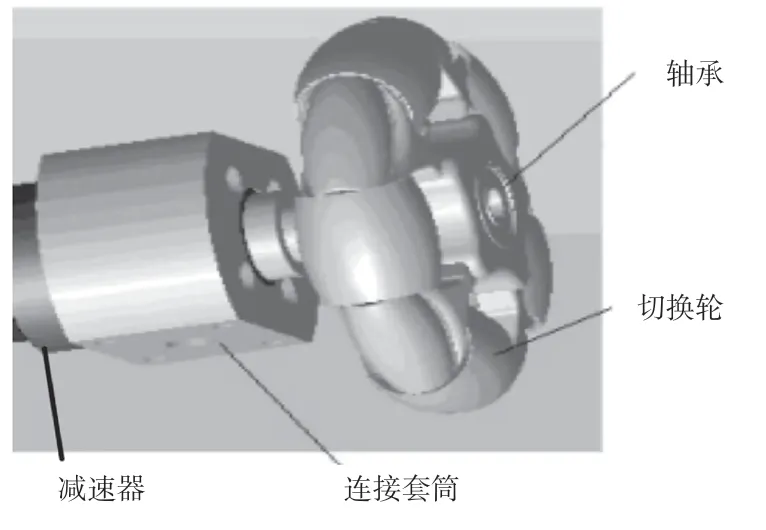
图4 移动机器人驱动单元的结构图
要进行机械驱动,就必须先在减速机后部增加电动机来进行转动,由于电机也可以采用直流无刷电机,以增加传递轴的动力,因此在电动机的前段还配备了减速器及传动齿轮。因为不要求提高移速,所以电动机也不要求设定高转速,因此直流无刷电机一般配有霍尔线号和码盘信号,码盘信号可以反映电动机的最高速度,霍尔信号可以指示电动机换向。
月球表面不是趋于平整的,在月球表面上很难保证4个轮子一直与地面完全接触,在有障碍物和坑的情况下更难移动[7]。这样就容易出现轮子不能借力出现空转或者打滑的情况,影响车体的运动以及控制。在轮子上结合压力传感器的信号设计压力在线监控及自适应控制系统,控制系统以嵌入式控制器为核心,通过采集压力传感器的数据分析判断当前压力值是否符合要求,当远低于机器人本身质量的1/4 时,给悬挂结构输出信号,悬挂结构可以有效增加轮子与地面的可靠接触,使机器处于平稳状态[8]。设计中使用直上直下的悬挂来让轮子有效接触地面。考虑PD 控制系统具有实时性和能快速响应的特性,控制并不复杂且实用,不用精确对象的参数,该车轮系统就采用PD 控制。根据设定的压力值与实际压力值的差值进行PD 控制,运算结果作为电机位移量的输入,如公式(10)所示。
式中:U(t)为运算结果;∆F为设定压力与实际压力的偏差;KP、KD分别为比例系数、微分系数。
4 移动机器人运动受力分析
由于移动机器人基本在平面上运动,因此该文研究移动机器人运动受力分析是指车体在平面上运动的时刻。移动机器人是基本对称的,假设车体的速度与车体坐标轴X的夹角θ∈[0,45°],车体受到的摩擦力如图5 所示。
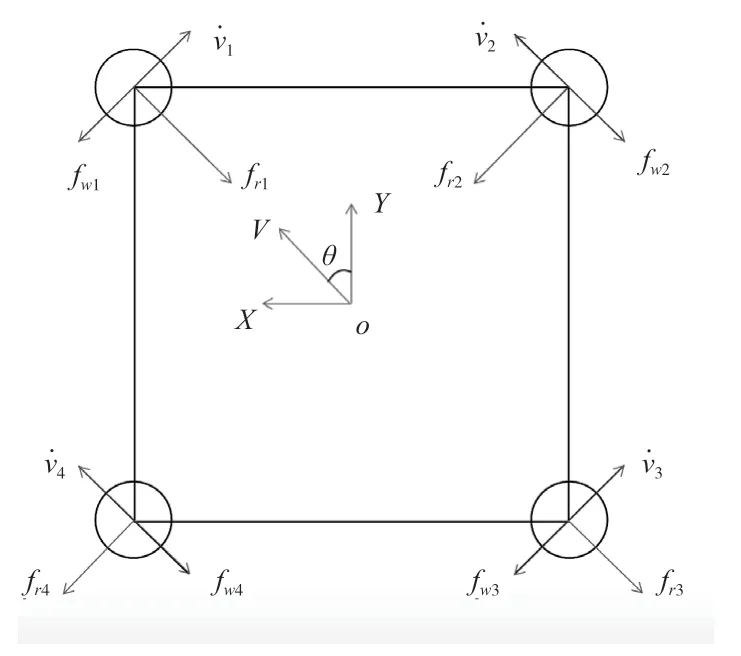
图5 轮子的速度与摩擦力示意图
当车体的速度V与坐标轴X成角为θ时,计算得车体的四个轮子的速度,如公式(11)所示。
式中:r为轮子的半径;~分别为4 个轮子的速度;V为车体的速度。
由公式(11)可知,轮子一与轮子三的速度相同但速度方向相反,轮子二与轮子四的速度相同但速度方向相反。
当轮子在地面运动时,滚动摩擦是物体与平面的接触面受压产生形变而造成的[9]。有很多因素会影响滚动摩擦fw,包括物体接触面材料、表面的形状、轮子的速度以及车体的载荷等因素,由于计算量大、条件约束比较多,因此一般将摩擦力代入简化的模型中。
当车体的速度与坐标轴X的夹角θ∈[0,45°]时,轮子一与轮子二的速度一直是不一样的,同时轮子与地面的摩擦力也是不同的。很难通过控制算法来控制电机力矩,考虑当θ=0°时,沿X轴移动,4 个轮子的转速相同。因此可以采用与控制4 个轮子输出力矩值相同的方法,用PI 算法来控制。当θ=45°时,轮子一和轮子三的速度为0 m/s,轮子二以及轮子四的速度相同,可以用PI 算法来控制轮子二和轮子四的输出力矩。当θ∈(0,45°)时,只能求解运动学方程,通过控制4 个方向轮子的速度来控制方向,以满足稳定性要求。
5 电控系统的设计
为了进一步分析万向轮在实际运行中的特性,该文设计并制作了四轮全方位移动车,每个轮子采用无刷直流电机独立驱动[10]。同时,每个电机配有1 ∶100 的减速齿轮,轮子的最高转速能达到100 r/min,可以通过反馈的码盘信号计算电机的速度和位置信息。电控系统的总体框图如图6 所示。
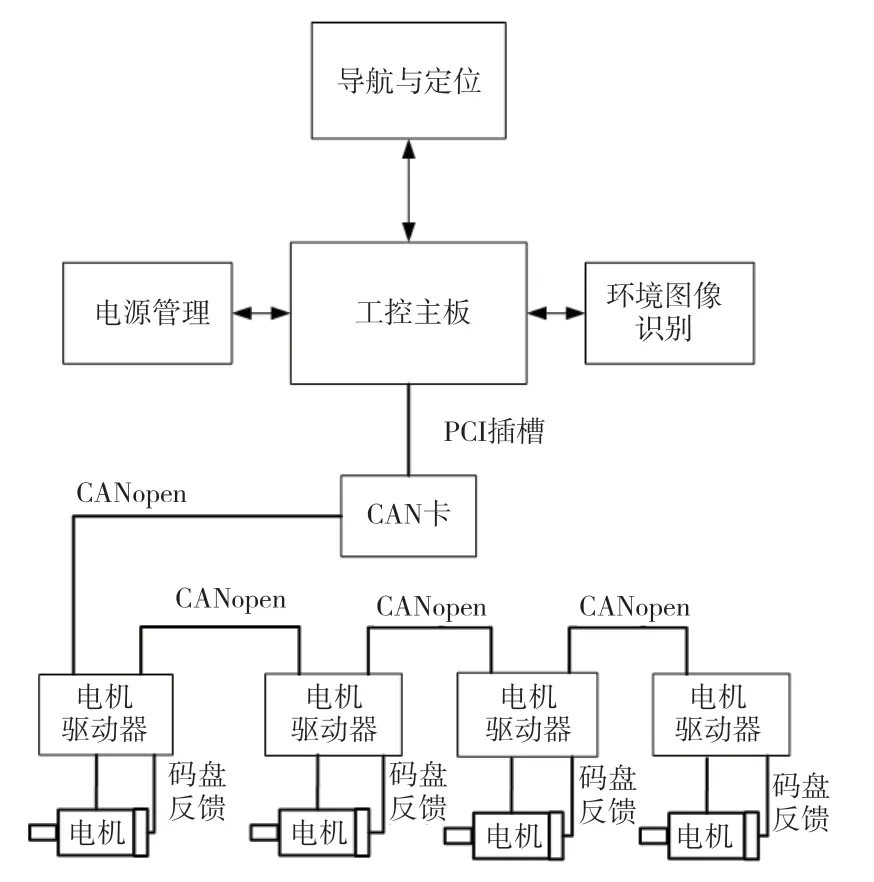
图6 电控系统框图
电机的驱动通过Copley 企业公司制造的ACJ 式无刷直流电机驱动,电源驱动器之间利用CAN 连接起来。CAN作为分布式控制或实时控制的串行通信网络,它让分布式控制在各节点间更实时,同时通信安全性也得到保障,在该系统中,通信速度可以达到1 Mbit/s。
上位机(工控主板)选择CANopen 网络主站下面的各个电机加载数据并设置CAN 卡,使传输无障碍。在CANopen 网络中,master 作为上位机,可以实时修改各个驱动器的参数,通过电机驱动器改变电机的运动[11]。同时,上位机也可以实时读取电机的位置、速度等信息。在速度模式下,上位机控制电机的流程图如图7 所示。
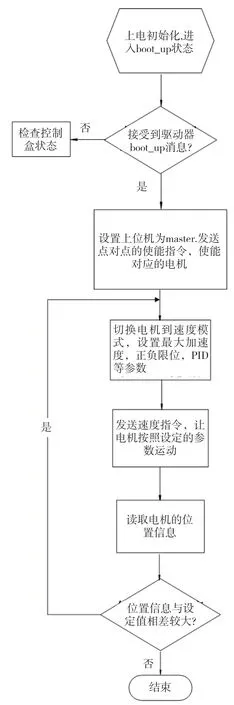
图7 电机转速控制流程图
移动机器人在运动的过程中,需要实时对电源进行管理。当电量不足时,应该发出报警信号。同时,当发生线路故障时,有可能会导致过电流﹑过电压等,需要上位机及时切断电源,以保护其他电路。
当移动机器人在月球上时,需要与地球进行通信。地面控制室对移动机器人进行导航,同时移动机器人也可以把月面上的探测信息反馈给地面控制室[12]。
由全方位轮构成的移动机器人具有移动灵活的特点,可以实现平动和原地转弯功能,不需要改变轮子的位置和角度,适合在狭小的空间中运动。移动机器人的整体运动与轮子运动的配合如图8 所示。

图8 整体运动与轮子运动的配合图
6 结语
全方位移动机器人采用全向轮,可以达到简化结构、成本降低的目的。首先,该文分析了四轮在不同环境下轮子的摩擦,在原有基础上增加悬挂结构,通过设计驱动结构来控制车子在朝不同方向移动的速度,从而提高四轮移动机器人的稳定性。其次,该文还设计电控系统框架图来实现驱动运动,绘制电机转速控制流程图来满足控制更及时、读取其中数据的需求,并在其中设置保护电路,以提高安全度和能量利用率。最后,研制的实体模型验证了该方法可以有效提高稳定性,与分析结论相符合,能够适应各种环境下的移动。
